Abstract
The value of verification of cyberphysical systems depends on the relationship between the state of the software and the state of the physical system. This relationship can be complex because of the real-time nature and different timelines of the physical plant, the sensors and actuators, and the software that is almost always concurrent and distributed. In this paper, we study different ways to construct a transition system model for the distributed and concurrent software components of a CPS. The purpose of the transition system model is to enable model checking, an established and widely used verification technique. We describe a logical-time-based transition system model, which is commonly used for verifying programs written in synchronous languages, and derive the conditions under which such a model faithfully reflects physical states. When these conditions are not met (a common situation), a finer-grained event-based transition system model may be required. We propose an approach for formal verification of cyberphysical systems using Lingua Franca, a language designed for programming cyberphysical systems, and Rebeca, an actor-based language designed for model checking distributed event-driven systems. We focus on the cyber part and model a faithful interface to the physical part. Our method relies on the assumption that the alignment of different timelines during the execution of the system is the responsibility of the underlying platforms. We make those assumptions explicit and clear.
1. Introduction
Cyberphysical systems (CPSs) are all around us, as in industrial control systems, robotics, smart grids, autonomous cars, and medical devices. Cyberphysical systems are integrations of computation, networking, and physical processes where physical and software components are deeply intertwined. Cyberphysical systems include networked embedded computers monitoring and controlling the physical processes. They also include mechanical, electrical, chemical, or biological components that are controlled or monitored by computer-based algorithms. A study of CPS may emphasize one or the other perspective. Here, we focus on verification of the software controlling the physical processes not the physical processes being controlled by the software.
Formal verification is about assuring properties of models. A holistic approach to verifying CPSs requires models of both the distributed software and physical processes. However, commonly used models for software are incompatible with commonly used models for physical processes [1]. An alternative is to clearly define the interfaces between the cyber and the physical parts of the system and separate the verification problem, from each side relying on the other side to faithfully carry out the semantics of the interfaces. When verifying software, we rely on the hardware to faithfully carry out the operations specified by the software. Hence, when we prove that the software has some property, such as never reaching some undesired state, we can assume, with high probability, that the physical system that executes the software will reflect a corresponding property. The nature of these interfaces, however, and the underlying assumptions they entail become extremely important. For CPS, verification is ultimately about assuring properties of the physical world. This means that it is not sufficient to study the software alone. We need to also study its interactions with its environment.
We use a simple example of a train door controller from Sirjani et al in [2] as our running example. This example, despite its simplicity, is sufficient to expose considerable subtleties in setting up a verification problem. Consider a train door that needs to be locked before the train starts moving. The software controlling train systems can lock the door and then send a command to the train to start moving. We can build a model of the software, or write a simple program, and formally verify its correctness. But if we do not know how and when the door gets locked and the train starts moving in response to a software command, then it will do little good to prove that the software never enters a state where it thinks the door is unlocked while the train is moving. The necessity to include the physical aspects of the system, not just its logical ones, is what makes this a CPS.
We can verify that the door’s software component is never in the unlocked state while the train’s software component is in the moving state. Depending on how the physical interfaces are realized, however, this may or may not align with the physical world. The state of the software system and the state of the physical world are not assured of aligning. What if the door component and the train component are executing on two different microprocessors separated by a network? What does it mean, in this case, for the two to simultaneously be in some state? To have a useful solution we need to address the problem of different timelines in distributed systems and different timelines between the software and the physical world.
A cyberphysical system can be viewed as an interacting pair of reactive systems, one defined in the world of software, and the other in the world of physics. The semantic worlds of physics and software are radically different and often mutually incompatible. Therefore, to prove properties of cyberphysical systems, we may not want to combine models from physics with those of software. Our approach is instead to build a model with a focus on the software side and an abstract (but faithful) model of the physical side. We model the distributed software system that monitors and receives the data from the physical processes and sends the control commands to the physical processes. Using this model, we can verify whether, upon receiving certain data, the software system is producing correct output based on the specified requirements. Modeling the input from the physical world “faithfully,” and producing “correct” output needs more elaboration. The model of the physical world is reduced to its interface to the software. One major issue in properly modeling this interface is timing.
Time is a critical feature in cyberphysical systems. There is the issue of time in distributed software, and also in the interface of software and the physical world. To effectively couple models of software with models of the physical world, we need modeling frameworks that support more than one timeline. We will explain later how we rely on certain assumptions to consider one logical timeline in the model of the software, and how certain guarantees from the selected programming language and the underlying platform allow us to assume that the logical time and the physical time are aligned in such a way that the model of the physical interface stays faithful to the physical world. In other words, our model of the physical inputs is faithful to the physical world and the physical outputs are created correctly. Please note that faithfulness and correctness here depends not only on the values of the inputs and outputs but also on their timing.
There are alternative approaches in analyzing CPS that are not the topic of this paper (see comprehensive overviews in [3,4]). The focus of the approach can be on modeling the physical processes, the dynamics of the physical quantities. The theory of dynamical control systems is a well-developed discipline rooted in continuous-time models. In a cyberphysical system, the controller consists of discrete software with concurrent components operating in multiple possible modes, interacting with the continuously evolving physical environment. Such systems are often modeled with a mix of finite automata and continuous dynamics, where mode transitions are modeled by discrete, instantaneous state transitions in an automaton, and each state of the automaton is associated with a distinct model of the continuous dynamics. Such models are called hybrid systems [5,6]. We will not consider hybrid system models here. We will instead assume a particular style of software, embodied in the Lingua Franca language (LF), that yields useful and realistic models.
Model checking [7] is a method for formal verification of reactive systems. A model checking tool receives two inputs: a model of the behavior of the system, and a set of properties represented as temporal logic formula showing the desired specification of the same system. A state-transition diagram is generated based on the interleaved semantics of the input model and the properties are checked against this state-transition diagram. Here we use the Reactive Object Language, Rebeca [8,9], and its model checking tool Afra [10] for formal verification of cyberphysical systems. For doing so, we map Lingua Franca [11,12,13] programs to an extended version of Timed Rebeca. Lingua Franca is a programming language based on the Reactor model of computation [12] for building cyberphysical systems. Both Rebeca and Lingua Franca are actor-based languages.
The Hewitt Actor model [14,15] is a reference model for concurrent distributed systems with an asynchronous event-driven model of computation. Its event-driven concurrent semantics makes it a natural choice for modeling cyberphysical systems, but it needs to be extended with timing properties. To model the unknown factors in a system, like the possible inputs from the environment, we can use nondeterminism in our Timed Rebeca model. Timed Rebeca [16,17] extends Rebeca to model the timing features. In Timed Rebeca the events are triggered based on their timetag order, and when there is more than one enabled event with the same logical-time tag, they are triggered in non-deterministic order. Lingua Franca also handles messages in timetag order, but then also prioritizes reactions within each reactor. In addition, to handle simultaneous messages to distinct reactors, LF uses the precedence graph relation between reactors to constrain the order of execution. To model the more deterministic behavior of LF, we have extended Timed Rebeca with priorities on message handlers and priorities on actors so that simultaneous messages (those with the same timetag) are handled in a deterministic order. For ordering the execution of actors, priorities are too strong, but they work for the purpose of this paper, which is verification.
There are multiple timelines involved in cyberphysical systems. To have a faithful model of time for cyberphysical systems we need to address both (1) the asynchrony in distributed systems, and (2) the mismatch between physical and logical time. To make analysis possible we need to build layers of abstraction and use assumptions by relying on the other layers. In Timed Rebeca we assume synchronized local clocks for actors that gives us a notion of global time across the model. We use logical timetags, and logical timetags are comparable across all actors in the model. However, in distributed systems we cannot assume synchronized clocks for distributed software components, at least not perfect ones. We need certain mechanisms to be able to have such assumption. Ptides [18] and Spanner [19] are two examples that assume synchronized clocks (up to an error bound) and use logical timetags. For distributed actors (as faithful representatives of distributed software components) to be able to have synchronized clocks and comparable timetags we rely on the lower-level network protocols to provide that for us. The second issue is the two timelines of logical world and physical world.
Lingua Franca includes a notion of “logical time” and binds that notion to “physical time” only where the software interacts with the physical world. In Lingua Franca the logical timetag of the input events are assigned based on the physical time of the physical processes. We also need to make sure that the logical timetag of the output events and the physical time of the actuated physical processes have the desired relation. We assume that the actuated outputs affect the physical world within a certain deadline.
Our model stays faithful to the system itself only based on the set of assumptions mentioned above. These assumptions allow us to reason about the system based on the logical timetags in our Rebeca model. Our model may not be a model with the least semantic gap with cyberphysical systems, but we will show in this paper that using model checking we are able to catch many subtle design problems. We show how these problems may exist in very simple examples that exhibit how building such systems can be extremely error-prone. Many of these problems may be related to the timing configurations. We believe that no simple approach exists for verification of cyberphysical systems. Several complimentary methods need to be used to cover the analysis of different aspects of such systems, and in each method we rely on certain assumptions that may be guaranteed by other methods.
This paper is an extension of a shorter conference paper [20] that formulates the question about the appropriate level of abstraction to use in constructing a transition system model of a cyberphysical system for the purpose of model checking. That paper introduces the distinction between logical-time-base semantics and event-based semantics and shows that although logical-time-based semantics yields simpler transition systems, when we have distributed systems, the model may not match what we can deploy. This extension elaborates the story, and presents the problem and the solutions in a more extensive and structured way. We explain both Lingua Franca and Rebeca languages and present their syntax. The first language is used for design and the second for verification. This paper further describes the mapping we used in transforming Lingua Franca to Rebeca. We used the same examples as in the shorter paper, but we added more detailed explanation and the structure of each example. We also add an extra example to show how a progress property can be violated by allowing an external physical event.
The paper is organized as follows. Section 2 introduces the programming model we assume (reactors) and the language in which programs are written (Lingua Franca, LF). It sketches the source code in LF for a running example, a train door controller. Section 3 introduces the Timed Rebeca language and its extension with priorities. Lingua Franca programs are translated into this extended version of Timed Rebeca to perform model checking. Section 4 explains the translation of Reactor programming model into Timed Rebeca with priorities. Section 5.1 studies the problem of model checking concurrent LF programs and explains two approaches based on two different semantics with different levels of granularity. Section 6 refines the train door example with programming constructs to control timing and increase interactivity and shows how the Rebeca model checking tool Afra can help identify subtle defects in the design. Section 8 concludes with a discussion of problems that remain open.
2. Lingua Franca and Reactors: Building Cyberphysical Systems
Here we first introduce the Lingua Franca language, and provide the syntax of the subset of the language that we use in our examples. Then, we explain the running example of a train door controller and show the program in LF.
2.1. The Lingua Franca Language
Lingua Franca (LF) [11,12,13], is a coordination language designed for embedded real-time systems. Software components are called “reactors”. The messages exchanged between reactors have logical timetags drawn from a discrete, totally ordered model of time. Any two messages with the same timetag are logically simultaneous, which means that for any reactor with these two messages as inputs, if it sees that one message has occurred, then it will also see that the other has occurred. Moreover, every reactor will react to incoming messages in timetag order. If the reactor has reacted to a message with timetag t, no future reaction in the same reactor will see any message with a lesser timetag.
If a reactor produces output messages in reaction to an input, then, by default, the logical time of the output will be identical to the logical time of the input. This principle is borrowed from synchronous languages [21]. The Lingua Franca compiler ensures that all logically simultaneous messages are processed in precedence order, so the computation is deterministic even with parallel execution. At a logical instant, the semantics of the program can be given as a unique least fixed point of a monotonic function on a lattice [22], so the computation is deterministic, even if it is distributed across a network. We call this semantics, based on the semantics of synchronous languages, the “logical-time-based semantics.” Here, we also consider an event-based semantics, which becomes useful when an interleaved execution of events with the same logical timetag becomes observable. Event-based semantics has finer granularity compared to logical-time-based semantics.
The syntax of a subset of Lingua Franca is given in Figure 1. The model consists of a set of reactors and a main reactor. Reactors contain state variables, input and output ports, physical actions and reactions. The body of reactions can be written in the target language. As of this writing, LF supports C, C++, and TypeScript. In each case, the LF compiler generates a standalone executable in the target language. A reactor may also react to a “physical action,” which is typically triggered by some external event such as a sensor [12]. The physical action will be assigned a timetag based on the current physical clock on the machine hosting the reactor.
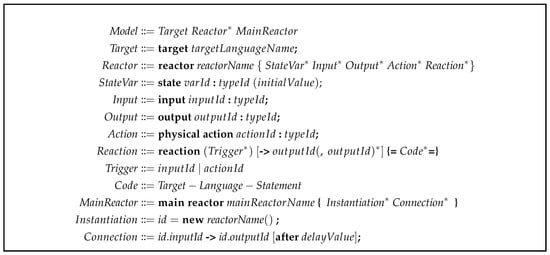
Figure 1.
Syntax of a subset of Lingua Franca that we use in our examples in this paper (adapted from Lingua Franca Github [24]). The syntax is written in a slightly revised version of Extended BNF where instead of putting terminals in quotations we use words in “bold” format. Angled brackets ⟨…⟩ are used as meta parenthesis, superscript + for repetition at least once, superscript * for repetition zero or more times, whereas using ⟨…⟩ with repetition denotes a comma separated list. Brackets indicates that the text within the brackets is optional. In the syntax, targetLanguageName, reactorName, mainReactorName stand for the target language for LF, the name of the reactor, and the name of the main reactor, respectively. The varId, typeId, inputId, outputId, actionId stand for the names of a variable, a type, an input and an output, respectively; and id stands for the name of an instance of a reactor. Target-Language-Statement stands for the statements of the target language. In the Reactor rule the components do not need to come in the presented order.
A key semantic property of Lingua Franca is that every reactor reacts to events in timetag order. Preserving this order in a distributed execution is a key challenge. One technique that has proven effective is Ptides [18], a decentralized and fault-tolerant coordination mechanism that relies on synchronized physical clocks with bounded error. The Ptides technique has been applied on a global scale in Google Spanner [23].
Lingua Franca includes a notion of a deadline, which is a relation between logical time and physical time, as measured on a particular platform. Specifically, a program may specify that the invocation of a reaction must occur within some physical-time interval of the logical timestamp of the message. This, together with physical actions, can be used to ensure some measure of alignment between logical time and some measurement of physical time.
2.2. The Simple Train Door Controller in Lingua Franca
Consider a train door that needs to be locked before the train starts moving. The software controlling train systems can lock the door and then send a command to the train to start moving. Consider in Figure 2b the sketch of an implementation of a highly simplified version of such train controller software in Lingua Franca. In this use, the code shown in the figure gets translated into C code that can run on a train’s microcontrollers. Similar realizations could be built in any of several model-based design languages, including any of the synchronous languages [21] (SCADE, Esterel, Lustre, SIGNAL, etc.), Simulink, LabVIEW, ModHel’X [25], Ptolemy II [26], or ForSyDe [27], to name a few. All will raise similar issues to those we address in this paper.
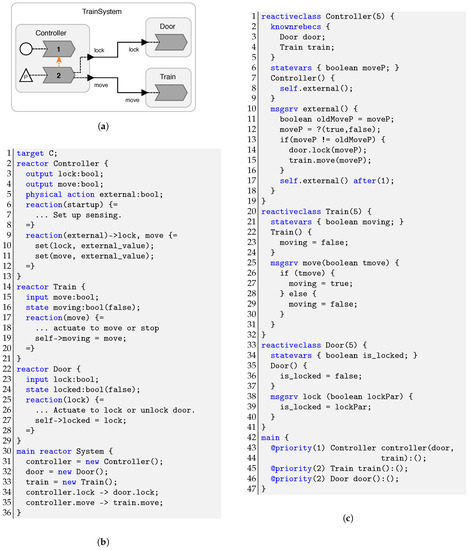
Figure 2.
The structure, Lingua Franca program, and Timed Rebeca model for the simple door controller example. (a) Structure of the simple door controller example. This image is rendered automatically by the Lingua Franca IDE using the KIELER Lightweight Diagrams framework [28]. (b) Lingua Franca code for the simple door controller example in Figure 2a with a potential defect. (c) Timed Rebeca model (extended with priorities) for the simple door controller example in Figure 2a.
The structure of the code is illustrated in Figure 2a. It consists of three components called “reactors,” instances of the reactor classes Controller, Door, and Train. The main reactor (starting online 30) instantiates and connects these components so that the controller sends a messages to both the door and the train. These components could be implemented on a single core, on multiple cores, or on separate processors connected via a network.
Let us focus first on the interaction between these components and the physical world. The Controller reactor class defines a physical action named “external_move” (line 5), which in Lingua Franca is an event that is triggered by something outside the software system and is then assigned a logical timetag that approximates the physical time at which that something occurred in the physical world [12]. In practice, in the reaction(startup) block of code (starting online 6), which executes upon startup of the system, the reactor could set up an interrupt service routine (ISR) to be invoked whenever the driver pushes a button to make the door lock and train move. The ISR would call an LF function schedule to trigger the action and assign it a timetag. The reaction to the external_move action (starting online 9) will be invoked when logical time reaches the assigned timetag. This reaction sets the outputs named “lock” and “move” to the Boolean value true. Since that outputs are connected to the input named “lock” of the door component (line 34) and the input named “move” of the train component (line 34), respectively, this results in a message to the door component and a message to the train component at the logical time of the timetag.
The train component has a state variable named “moving” (line 16) that changes value when it receives a message on its “move” input port (line 19). The variable has value true when the train is moving and false when the train is stopped. The door component has a state variable named “locked” (line 24) that changes value when it receives a message on its “lock” input port (lines 23 and 27).
3. Timed Rebeca: Model Checking Cyberphysical Systems
Here we explain the Rebeca language and its extension with time, Timed Rebeca. Then we give a brief overview of model checking, and finally show the Timed Rebeca model of the running example.
3.1. The Timed Rebeca Language
The Reactive Object Language, Rebeca [8,9], is an actor-based [14,15] modeling language supported by a model checking tool Afra [10]. Rebeca is used for modeling and formal verification of concurrent and distributed systems. The model of computation in Rebeca is event-driven and the communication is asynchronous. The grammar is shown in Figure 3. Actors have message queues; each actor takes the message on the top of the queue, executes the method related to that message (called the message server) in an atomic and non-preemptive way. While executing a method, messages can be sent to other actors (or itself), and the values of the state variables can change. Sending messages is non-blocking, and there is no explicit receive statement.
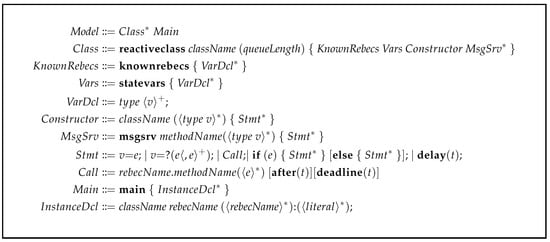
Figure 3.
Syntax of Timed Rebeca (adapted from [30]). The notation is the same as that in Figure 1. Identifiers , , , , v, , and denote class name, rebec name, method name, queue length, variable, literal, and type, respectively; and e denotes an (arithmetic, Boolean or non-deterministic choice) expression. In the instance declaration (rule ), the list of rebec names passed as parameters denotes the known rebecs of that instance, and the list of literals denotes the parameters of its constructor.
In Timed Rebeca [16,29,30] three keywords are added to model logical time: delay, after and deadline. Timetags are attached to messages and states of each actor. Here we have a buffer of timetagged messages instead of a message queue. Using the keyword delay, one can model progress of time while executing a method. If a send statement is augmented by after(t), the timetag of the message when it is put in the queue of the receiver is t units more than the timetag of the message when it is sent. The timetag of the message when it is sent is the current logical time of the sender. By using after, one can model the network delay; periodic events can be modeled using send messages to itself augmented by after. The deadline keyword models the timeout; if the current time of the receiver actor at the time of triggering the event (taking the message to handle it) is more than the expressed deadline then the model checking tool will complain and raise the deadline-miss warning. While mapping Lingua Franca programs to Timed Rebeca we only use the after construct; it is used to increase the value of the logical timetag of the message, like in LF.
The original Rebeca language does not have a model of time and handles incoming messages in non-deterministic order. Timed Rebeca adds a model of time, but still handles incoming messages at each logical time in non-deterministic order. Our extension supports annotating Rebeca actors, and also their message servers, with priorities. These priorities can enforce the ordering constraints on message handlers that are defined by the Lingua Franca language.
The external physical inputs in Lingua Franca are modeled as sending those messages to self. These messages are sent to self-augmented with the after construct. We can assign non-deterministic values to after and hence the messages are received some time later non-deterministically. Of course we can also model a periodic physical input by assigning the period of arrival as the value of the after construct.
Rebeca and Timed Rebeca are designed to enable verification of distributed programs using model checking. Model checking [7] is an automated formal verification technique. The model checking tool receives the behavioral model and the required properties as inputs, checks the properties against the behavioral model, and declares whether the property is satisfied. If the property is not satisfied the tool generates a counterexample, which is a trace in the execution to the state where the property is violated. The model checking algorithm works by building a labeled transition system model of an interleaved execution of enabled actors. In each state, all enabled reactions are considered and the outgoing transitions from the state model execution of those reactions. Execution of these transitions builds new states.
3.2. A Simple Train Door Controller in Timed Rebeca
A (slightly simplified) Timed Rebeca model of the program in Figure 2b is shown in Figure 2c. Given this model, we can use the Afra model checking tool to get the transition system model and to check safety properties. An interesting point in this Rebeca code is modeling the production of the stimulus that triggers reactions. We need to model the environment or the interface to the physical world. Online 8, the constructor for the controller sends itself the message external. On line 12 in the external method the value of moveP is set to true or false non-deterministically to show the possibility of presence or absence of the external message. This is how we model possible external stimulus at different times. If this value is changed from the previous period (comparing moveP and oldMoveP on line 13) then the two message servers lock and move are called to lock (or unlock) the door and move (or stop) the train (lines 14 and 15). This external message is sent to itself every one time unit by the controller (line 17).
4. Mapping of Reactors to Timed Rebeca with Priorities
Table 1 shows the mapping between Reactors and Timed Rebeca (extended with priorities). Each reactor in Lingua Franca is mapped to a reactive class, and each reaction is mapped to a message server in Rebeca. The trigger in a reaction is the name of the message server, and states in LF are mapped to state variables in Rebeca. In Rebeca actors send messages to another actor rather than writing on a port. In Lingua Franca we build the bindings between inputs and outputs explicitly in the connection part of the program. In LF a reaction reacts to a trigger, and the trigger is one of the inputs to the reactor. A reaction has outputs and those outputs are set by assigning values to them. Then in the connection part of the main reactor, all the bindings are set by defining which input of which reactor is connected to which output of which reactor. This way the flow of data is realized. You can change the topology by changing the connections. In Rebeca, a message server of other rebecs (or self) is called, and that is how the binding and the flow is realized. There is also a list of known rebecs in a reactive class that shows the rebecs to whom you may send messages to.

Table 1.
The mapping between Lingua Franca and Timed Rebeca.
For the timing issues, there is an after keyword in Lingua Franca that has the same semantics as in Timed Rebeca. The timetag of the sent message is increased by the value of the after. Rebeca has a delay construct which is not used in LF. Delay in Rebeca increases the timetag within a message server. This has no use in synchronous languages.
In Lingua Franca the messages are handled in timetag order, and for the messages with the same timetag the reactions are prioritized within each reactor. To handle simultaneous messages to distinct reactors, LF uses the precedence graph relation between reactions to constrain the order of execution. To faithfully model the LF programs, we have extended Timed Rebeca with priorities. The priorities are added by annotations to both message servers and rebecs. The precedence graphs in LF is more general than priorities, but priorities are enough for the purpose of this paper because in Lingua Franca distinct reactors do not have access to each other’s state variables. Hence, although the use of priorities means that Rebeca models only a subset of the possible orders of invocations, it is nevertheless assured of modeling all the behaviors (messages sent and received and their timetags). Nevertheless, in the future, it may prove useful to further augment Timed Rebeca to model all the execution orders allowed by the precedence graph. This could become important when side effects of reaction execution are important.
We can also describe part of the mapping using the structure diagram in Figure 2a. The triangle with the “P” is the physical action in LF and external message server in Rebeca, the circle is the “startup” event in LF and the message sent in the constructor message server in Rebeca, the V-shape arrows are reactions in LF and message servers in Rebeca, and the red arrows between the reactions (message servers) are dependencies in LF, and priorities in Rebeca.
The mapping between Reactors and Timed Rebeca is natural and can easily be done. In Lingua Franca we can write the body of reactions in any target language that LF supports. In this work we write the body of reactions in Rebeca. After the code is model checked and debugged, then the Rebeca code needs to be translated to one of the languages supported by LF to be able to execute the LF program. Many design problems can be revealed by model checking the abstract model when the complicated target code is not yet in place. We can also consider mapping the target codes to Rebeca; that is left for the future work.
5. Constructing a Transition System Model
For model checking we build the state-transition system of the behavioral model. In this section, we explain the two types of transition system models we may consider in model checking, based on two different semantics with different levels of granularity. We use the running example to better explain the differences.
5.1. Logical-Time-Based and Event-Based Semantics
A transition system model, which is needed for model checking, requires a concept of the “state” of a system at a particular “instant in time.” It does not require that “time” be Newtonian time, measured in seconds, minutes, and hours and aligned to the Earth’s orbit around the sun. Instead, it only requires a concept of simultaneity, where the “state” of the system is the composition of the states of its components at a “simultaneous instant,” whatever that means in the model. In Lingua Franca, we can define a “simultaneous instant” to be the endpoint when all reactions at a logical time have completed. The “state” at that “instant” can be defined to be the combination of the state variable valuations of all the reactors at that “instant.” This is the approach commonly used in synchronous languages, where transient states during the computation at a logical time are ignored. We call this interpretation a logical-time-based semantics.
To perform verification formally, we need to build a state-transition model of the program. Figure 4b gives the logical-time-based semantics of the program in Figure 2b. In the initial state, the door is unlocked and the train is not moving. This state-transition system shows that at each logical time, the program will non-deterministically either remain in the same state (indicated by the self-loop transitions) or change to the other state. Once the program is in the new state, at subsequent logical times, it will similarly non-deterministically remain in the same state or transition back to the initial state. This transformation relies on the semantics of Lingua Franca being rooted in the fixed-point semantics of synchronous languages [22].
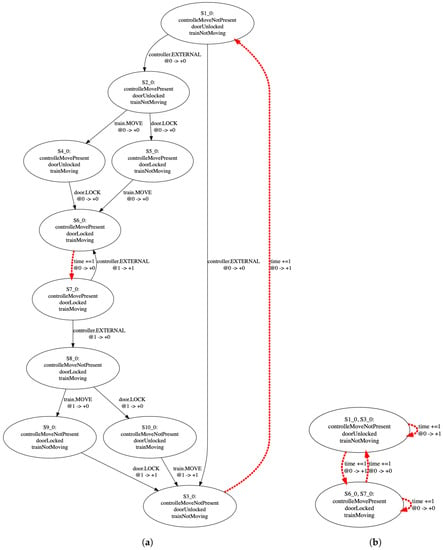
Figure 4.
Transition system model of the Timed Rebeca model in Figure 2c. (a) The Event-based transition system model which is generated by Afra [10]. (b) The Logical-time-based semantics of the model.
Looking at Figure 4b, it is obvious that the model never enters a state where the train is moving, and the door is unlocked. The transition system model is so simple in this case that there is no need for a model checker to verify this property.
This approach to verification is sound because it accurately and correctly models the semantics of the program. However, the astute reader should be nervous. What if the door component and the train component are executing on two different microprocessors separated by a network? In this case, there will be a physical-time delay between when the train begins moving and the door gets locked, even if there is no logical-time delay. In this case, the verification exercise is simply misleading unless we consider this delay in our model.
In the Lingua Franca software, the offending physical state of the system, where the train is moving and door is unlocked, is a transitory state occupied briefly during the computation at a logical-time instant. Its duration in logical time is exactly zero. If the physical system is designed in such a way that the physical environment can only observe states with non-zero logical-time duration, then we can have confidence in the safety conclusion.
It is not uncommon to design control system hardware precisely to make such guarantees. Programmable Logic Controllers (PLCs), which are widely used to control machinery in industrial automation, have mechanisms that provide such guarantees [31,32]. In particular, PLC software does not directly interact with physical actuators. Instead, during a cycle of execution, the software components write commands to a buffer in memory, and only after the cycle is complete does the hardware read from that memory and drive the physical actuators. If the memory goes through transitory unsafe states during the execution of a cycle, those unsafe states are guaranteed to have no effect on the physical world. If Lingua Franca were to be deployed on hardware with such an I/O system, where a “cycle” is defined by the completion of all reactions at a logical time, then no safety violation would occur. However, this conclusion is not based on the program alone, but rather on a deep and tricky analysis of the program and the hardware on which it is executing. Moreover, the PLC-style semantics is difficult to realize on a distributed system. If the Door component and the Train component are executing on distinct microprocessors, then ensuring that their actuations occur only after a logical-time cycles has been completed requires fairly sophisticated distributed control over the program execution. Perhaps a better approach is to model the steps in the execution in more detail and attempt to design the program to be safe even without such a sophisticated I/O system. We will do that next.
A Lingua Franca execution can be modeled as a sequence of reaction invocations, where each reaction is atomic. We call such a model an event-based semantics. It is finer grained than the logical-time-based semantics and it includes a sequence of steps performed during a logical-time instant. Each step is one invocation of a reaction in the Lingua Franca program. Each reaction is triggered by one or more “events,” where an “event” is either a message sent between components or an action that has been scheduled by a call to the schedule function in Lingua Franca. Every such event occurs at a logical-time instant.
5.2. The State-Transition Diagram and the Safety Property of the Example
For this simple system, the safety property of interest is that the door be locked while the train is moving. This can be posed as a formal verification problem, where the goal is to prove this property. In the program shown in Figure 2b, the door and train components have state variables, and we can attempt to verify that the door is never in the unlocked state while the train is in the moving state. Depending on how the physical interfaces are realized, however, this may or may not align with the physical world. We can use the features of Lingua Franca to assure that the state of the software system and the state of the physical world are aligned.
We can use Afra model checking tool to get the event-based state-transition system of the Rebeca model in Figure 2c and to check safety properties. The event-based transition system is shown in Figure 4a. The transitions shown in black in Figure 4a are transitions that all occur at the same logical time. The transitions shown in red coincide with the advancement of logical time. Thus, Figure 4b can be understood to be an abstraction of this transition diagram that aggregates all the intermediate states at each logical time into one single state. The self-loops in Figure 4b are represented as the transitions from S6_0 to S7_0 and back, and S1_0 to S3_0 and back in Figure 4a.
The transition system of Figure 4a is a slightly revised version of the transition system generated automatically by Afra. In this transition system, the state labeled “S4_0” violates our safety requirement. The train is moving, and the door is unlocked. There is a safe trace, going through S5_0 instead of S4_0, but the interleaving semantics allows either trace. Similarly, the state labeled “S10_0” is also not safe. Here we see the so-called diamond effect that is well-known in the model checking domain and may be created when two transitions are enabled in the same state (like in states “S2_0” and “S8_0” ) and are chosen non-deterministically. If the I/O system makes these transitory states invisible to the environment, as could be done using the PLC-style of I/O, then we do not need this finer-grained transition system model and could instead have verified the safety property using the much simpler logical-time-based model of Figure 4b. Without such an I/O system, however, we have more work to do before we can have confidence in this system.
6. Extending the Simple Train Door Controller
We use variations of a simple train door example from Sirjani et al. [2] to show how we address different questions raised in verification of CPS. In Figure 2, we show a model with three components, a train, an external door in the train, and a controller that commands the door to lock, and the train to move. In Section 6.1, we add timing features to the example and show how we can fix the problem of program in Figure 2 by the proper timing features. We also show the subtleties with the timing and how we can easily make design mistakes. We also show how the external physical triggers can put the system at risk and jeopardize the safety property. In Section 6.2, we show an example where an external physical action can block the progress of system. For example a passenger can keep pressing the open-door button and hence stopping the door from being closed and locked, and as a consequence prevent the departure of the train.
6.1. The Train Door Controller with Timing Features
The flaw identified by the Afra tool in the program in Figure 2b can be corrected with a slightly more sophisticated Lingua Franca program. Please note that the flaw only exists if we consider the event-based semantics of the program. A simple way is to define two reactions of move and stop in the train reactor (instead of just one reaction of move that decides to actuate move or stop based on the input parameter), and lock and unlock in the door reactor (instead of just one reaction of lock that decides to actuate lock or unlock based on the input parameter), and increment the timetag of an unlock or move message so that it has a logical timetag that is strictly larger than the corresponding stop or lock message. Such a Lingua Franca program is shown in Figure 5b. It has the structure shown in Figure 5a.
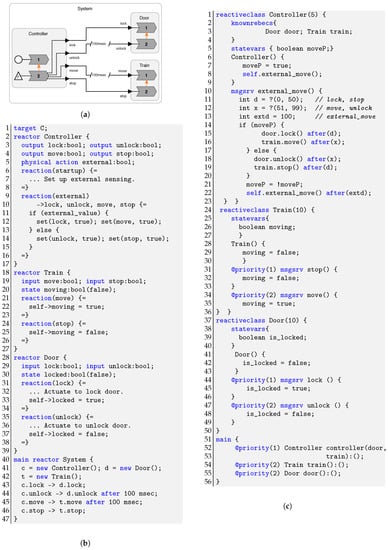
Figure 5.
The Train Door Example with delays in lock/unlock and stop/move. (a) Structure of the door controller example. (b) Variant of Figure 2b that manipulates timetags. The values for after are set to 100. (c) The Rebeca model for the code in Figure 5b. Please note that here we put different values for after constructs compared to the LF code in Figure 5b.
Here, we use the after keyword on lines 44 and 45 to increment the timetag of the messages by a specified amount (100 msec). This keyword has exactly the same semantics in Lingua Franca and Timed Rebeca, so it creates no complications in translation. With these changes, when the Controller requests that the train move, it issues a lock message with the timetag of the original request and a move message with a timetag incremented by 100 msec. When it requests that the train stop, the unlock message is similarly delayed. This change required separating the lock from the unlock signal and the move from the stop signal because the logical-time properties of these pairs of signals differ. In Figure 2a, by contrast, lock and unlock are carried by a single Boolean, as are move and stop.
We can adjust the Timed Rebeca model to match this new design (see Figure 5c) and re-run the model checker. This time, Afra reveals a more subtle problem that can occur if the system has no constraints on the spacing between timetags of successive external events. Suppose that the train is stopped, and the door is unlocked and we received external = true at logical-time 0. This will result in a lock message to the Door with timetag 0 and a move message to the Train with timetag 100 msec. Suppose that we then receive external = false at logical time 50 msec. This will result in a stop message to the Train with timetag 50 msec, overtaking the move message! However, worse, it will send an unlock message with timetag 150 msec, and the door will unlock while the train is moving! This new flaw is revealed by a counterexample generated by Afra shown in Figure 6. In Figure 6, you may see the Afra interface with the Rebeca model and the property file including the assertions. The Boolean variables defined in the “define” part of the property file are those that are shown in the states in the transition system. In the right corner of the figure, the trace of the counterexample is shown and the values of variables in state 11_0 (the state right before the assertion is failed) are shown in another window.
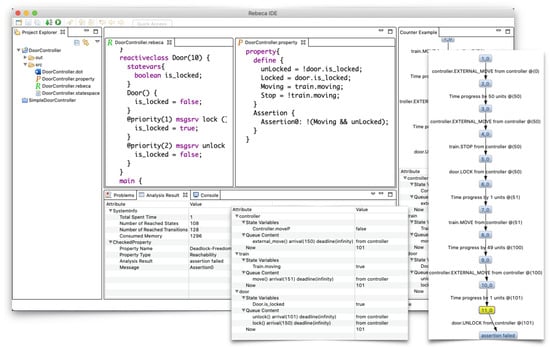
Figure 6.
An snapshot of Afra finding the counterexample for the model in Figure 5c where the physical external event occurs every 50 units of time (variable extd in the model is set to 50). The value of the variables and the contents of the message buffer in state 11_0 is shown in the snapshot.
This new flaw is not correctable by simply manipulating logical timetags. The flaw pertains to the relationship between physical time and logical time (with no constraints on the spacing between timetags of successive external events that represent physical actions), and our verification strategy here stays entirely in the world of logical time. A similarly cross-cutting flaw could occur if the later timetag of the move event does not result in a later occurrence of the train moving physically. Again, this flaw pertains to the relationship between physical and logical times, a relationship that is ultimately established not only by the software in the systems, but rather by the combination of software and hardware.
6.2. The Train Door Controller and a Passenger
Another example is shown in Figure 7. In this example we only show the controller and the door. Here the door accepts four commands of unlock, open, close and lock. When the train stops at a platform the controller unlocks and then opens the door. When the train is ready to move the controller first closes and then locks the door. The train can only start moving if the doors are locked. However, the door can only be locked if the door is closed. Here we assume that there is also an open button for the passengers. Therefore, a passenger can press the open button before the door is locked. The controller sends the close and then the lock command, but there is a scenario in which the external open button is pressed quickly enough that the door can never be locked, and consequently the train can never move.
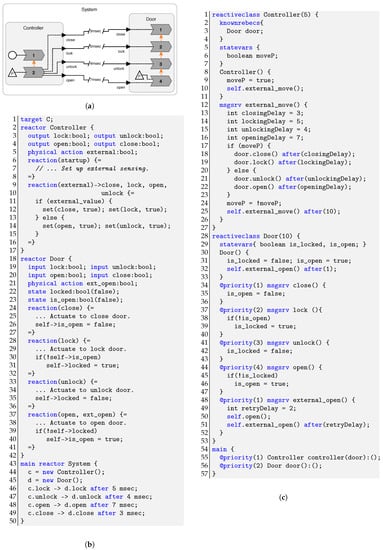
We can change the values of the after construct for different commands and see various behaviors of the system for different configurations. With the configuration shown in Figure 7 the door will never be locked. We checked the assertion of door being unlocked and it is satisfied in this scenario showing that the door stays unlocked all the time. If we increase the value of after in sending external_open it will eventually be large enough to allow the door to close and then lock.
7. A Quick Overview of Related Work
For analyzing cyberphysical systems, both simulation and formal verification are used. Timed and hybrid models are used for modeling cyberphysical systems and provide the necessary formal semantics for verification. A simulator for hybrid systems must capture different types of behaviors, including continuous time, discrete events, and finite-state machines; the tool must resolve interface problems between these domains. As explained in the introduction we propose a different approach in this paper.
For modeling timed systems, there is a richness of tools and techniques, including timed automata [33,34], timed CCS [35], timed Petri nets [36], and Timed Rebeca [16]. The framework of Hybrid automata [5], provides a formal modeling and specification environment to analyze the interaction between the discrete and continuous parts of a cyberphysical system. Hybrid automata can be considered to be generalizations of finite-state automata augmented with a finite set of real-valued variables whose dynamics in each state is governed by a system of ordinary differential equations [37]. Moreover, the discrete transitions of hybrid automata are guarded by constraints over the values of these real-valued variables, and enable discontinuous jumps in the evolution of these variables. As another example, Timed hybrid Petri nets [38] can be used to model hybrid systems and CPSs. For analysis of these hybrid Petri nets in [38] a translation to hybrid automata is presented.
Hybrid Systems are heterogeneous systems that are combinations of continuous and discrete dynamics of different types. Ptolemy II [26] is a framework that uses the concept of model of computation (MoC) which defines the rules for concurrent execution of components and their communications. Ptolemy II supports many models of computation like process networks, discrete events and continuous time. Heterogeneous models can be made by nesting these models of computations in a hierarchical structure. Simulation of heterogeneous models is supported by Ptolemy II, but as far as we know there is no formal verification support for hybrid models of Ptolemy II framework. There are other tools and frameworks for cosimulation of such models [39].
8. Discussion and Future Work
The combination of a language like Lingua Franca with an explicit model of time, and a model checking tool like Timed Rebeca with Afra can prove quite effective for finding several bugs. Although the Rebeca language is expressive enough, it is not clear whether it would be accepted by designers as a target language, and the toolchains do not currently exist to compile it down to code that could execute in microcontrollers as would be needed to deploy the train controller. If these toolchains are created, however, the result could be a very effective package for designing and deploying formally verifiable CPS software. However, there are some serious limitations that warrant further research.
Based on our (limited number of) experiments and our insights, the mapping between Lingua Franca and Timed Rebeca can be simple as long as we stay in the logical-time domain of Lingua Franca (and as long as the reaction code in Lingua Franca can be translated to message server code in Timed Rebeca). By mapping LF to Rebeca and through our examples we demonstrated a set of potential design defects that can be found using model checking. In the first example we show the model and how logical-time-based semantics and event-based semantics are different. Logical-time-based semantics yields simpler transition systems, which are more tractable for model checking, but the validity of these models depends on stronger assumptions about the underlying execution platform. Particularly with distributed CPS, these assumptions may become unrealistic.
The second example shows how timing comes in, and how we can rely on different timing configurations to build correct cyberphysical systems. It also shows how subtle defects may arise that are not easy for a designer to notice, and how model checking helps to reveal such defects. In the last two examples we show the connection between the logical and the physical timelines, the effect of physical events on the logical behavior of the software, and how by using model checking we can move towards finding such problems.
Because Rebeca is designed for model checking, Rebeca models are closed, meaning that there are no external inputs. The reactions that can be triggered from outside of the Lingua Franca code (like the physical actions named external in Figure 2b and ext_open in Figure 7b) can be modeled as message servers that are invoked non-deterministically. This non-deterministic call can be modeled as a self-call from within the same message server. This message server is first called in the constructor of the rebec, as shown for external on line 8 of Figure 2c, and for ext_open on line 32 of Figure 7c. The current mapping gives us a succinct Rebeca model with a natural mapping to the LF structure. If we have knowledge about the behavior of the environment, like some relation on the inputs, then we need to add an extra actor to model the environment.
Because the Timed Rebeca code will be used for model checking, we need to be careful regarding the state–space explosion, a known vulnerability of model checking. The message servers tagged as external (to model the physical actions in LF) can be problematic here. The logical-time intervals over which these methods can be called has a great effect on the state–space size. There are multiple techniques proposed for state–space reduction in model checking of Timed Rebeca [30,40]. However, if the state–space gets too large, model checking becomes intractable.
Although we performed the mapping from Lingua Franca to Timed Rebeca by hand, it should be possible to create a Rebeca target for Lingua Franca and then automate the translation. When using this target, the body of each reaction will need to be written in Rebeca’s own language for writing message servers. This is necessary because Afra analyzes this code to build the transition system model, and, as of now, Afra is not capable of analyzing arbitrary C, C++, or TypeScript code, the target languages currently supported by Lingua Franca.
One subtle point in model checking of CPS that we presented is that we only checked how the state of the program evolves in logical time, not how it evolves in physical time. Every model checking tool that we know of assumes a single timeline, but our systems always have at least three. There is the logical timeline of timestamps, and programs can be verified on this timeline, proving for example that a safety condition is satisfied by a state trajectory evolving on this logical timeline. But in a concurrent and distributed CPS, the state trajectory is also evolving along a physical Newtonian timeline, and our proof says nothing about its safety on that timeline. Moreover, every clock that measures Newtonian time will differ from every other clock that measures Newtonian time, so any constraints we impose on execution based on such clocks may again lead to proofs of safety even though the physical system is capable of entering unsafe states. Our approach in this paper is relying on a set of assumptions mainly based on alignment of logical and physical time at execution time.
When we assert that a design has been “verified” against a set of formal requirements, we need to make every effort to make as clear as possible what are the assumptions about the physical system that make our conclusions valid. There will always be assumptions, and in any real system deployment, any assumption may be violated. There is no such thing as a provably correct system.
Author Contributions
Conceptualization, M.S. and E.A.L.; Formal analysis, M.S. and E.A.L.; Methodology, M.S., E.A.L. and E.K.; Software, E.A.L. and E.K.; Visualization, M.S., E.A.L. and E.K.; Writing—original draft, M.S. and E.A.L.; Writing—review & editing, E.K. All authors have read and agreed to the published version of the manuscript.
Funding
The work of the first author is supported in part by KKS SACSys Synergy project (Safe and Secure Adaptive Collaborative Systems), and KKS DPAC Project (Dependable Platforms for Autonomous Systems and Control) at Mälardalen University, and MACMa Project (Modeling and Analyzing Event-based Autonomous Systems) at Software Center, Sweden. The second author receives support from the National Science Foundation (NSF), award #CNS-1836601 (Reconciling Safety with the Internet) and the iCyPhy Research Center (Industrial Cyberphysical Systems), supported by Denso, Siemens, and Toyota.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lee, E.A. Cyber Physical Systems: Design Challenges. In Proceedings of the 2008 11th IEEE International Symposium on Object and Component-Oriented Real-Time Distributed Computing (ISORC), Orlando, FL, USA, 5–7 May 2008; pp. 363–369. [Google Scholar] [CrossRef]
- Sirjani, M.; Provenzano, L.; Asadollah, S.A.; Moghadam, M.H. From Requirements to Verifiable Executable Models using Rebeca. In Proceedings of the International Workshop on Automated and verifiable Software System Development, Oslo, Norway, 16–20 September 2019. [Google Scholar]
- Lee, E.A.; Seshia, S.A. Introduction to Embedded Systems—A Cyber-Physical Systems Approach; MIT Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Alur, R. Principles of Cyber-Physical Systems; MIT Press: Cambridge, MA, USA, 2019. [Google Scholar]
- Henzinger, T.A. The Theory of Hybrid Automata. In Proceedings of the 11th Annual IEEE Symposium on Logic in Computer Science, New Brunswick, NJ, USA, 27–30 July 1996; pp. 278–292. [Google Scholar]
- Carloni, L.P.; Passerone, R.; Pinto, A.; Sangiovanni-Vincentelli, A. Languages and Tools for Hybrid Systems Design. Found. Trends Electron. Des. Autom. 2006, 1, 1–204. [Google Scholar] [CrossRef]
- Baier, C.; Katoen, J. Principles of Model Checking; MIT Press: Cambridge, MA, USA, 2008. [Google Scholar]
- Sirjani, M.; Movaghar, A.; Shali, A.; de Boer, F.S. Modeling and Verification of Reactive Systems using Rebeca. Fundam. Inform. 2004, 63, 385–410. [Google Scholar]
- Sirjani, M.; Jaghoori, M.M. Ten Years of Analyzing Actors: Rebeca Experience. In Formal Modeling: Actors, Open Systems, Biological Systems; Springer: Berlin/Heidelberg, Germany, 2011; pp. 20–56. [Google Scholar]
- Rebeca. Afra Tool. 2019. Available online: http://rebeca-lang.org/alltools/Afra (accessed on 1 July 2019).
- Lohstroh, M.; Schoeberl, M.; Goens, A.; Wasicek, A.; Gill, C.; Sirjani, M.; Lee, E.A. Invited: Actors Revisited for Time-Critical Systems. In Proceedings of the Design Automation Conference (DAC), Las Vegas, NA, USA, 3–5 June 2019. [Google Scholar]
- Lohstroh, M.; Romeo, I.N.I.; Goens, A.; Derler, P.; Castrillon, J.; Lee, E.A.; Sangiovanni-Vincentelli, A. Reactors: A Deterministic Model for Composable Reactive Systems. In Proceedings of the Model-Based Design of Cyber Physical Systems (CyPhy’19), in Conjunction with ESWEEK 2019, New York, NY, USA, 17–18 October 2019. [Google Scholar]
- Lohstroh, M.; Lee, E.A. Deterministic Actors. In Proceedings of the 2019 Forum on Specification and Design Languages (FDL), Southampton, UK, 2–4 September 2019. [Google Scholar]
- Hewitt, C. Viewing control structures as patterns of passing messages. J. Artif. Intell. 1977, 8, 323–363. [Google Scholar] [CrossRef]
- Agha, G.A. ACTORS—A Model of Concurrent Computation in Distributed Systems; Series in Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1990. [Google Scholar]
- Reynisson, A.H.; Sirjani, M.; Aceto, L.; Cimini, M.; Jafari, A.; Ingólfsdóttir, A.; Sigurdarson, S.H. Modelling and simulation of asynchronous real-time systems using Timed Rebeca. Sci. Comput. Program. 2014, 89, 41–68. [Google Scholar] [CrossRef]
- Sirjani, M. Rebeca: Theory, Applications, and Tools. In Formal Methods for Components and Objects, International Symposium, FMCO 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 102–126. [Google Scholar]
- Zhao, Y.; Lee, E.A.; Liu, J. A Programming Model for Time-Synchronized Distributed Real-Time Systems. In Proceedings of the Real-Time and Embedded Technology and Applications Symposium (RTAS), Bellevue, WA, USA, 3–6 April 2007; pp. 259–268. [Google Scholar] [CrossRef]
- Corbett, J.C.; Dean, J.; Epstein, M.; Fikes, A.; Frost, C.; Furman, J.J.; Ghemawat, S.; Gubarev, A.; Heiser, C.; Hochschild, P.; et al. Spanner: Google Globally Distributed Database. ACM Trans. Comput. Syst. 2013, 31, 1–22. [Google Scholar] [CrossRef]
- Sirjani, M.; Khamespanah, E.; Lee, E.A. Model Checking Software in Cyberphysical Systems. In Proceedings of the COMPSAC 2020, Madrid, Spain, 13–17 July 2020. [Google Scholar]
- Benveniste, A.; Berry, G. The Synchronous Approach to Reactive and Real-Time Systems. Proc. IEEE 1991, 79, 1270–1282. [Google Scholar] [CrossRef]
- Edwards, S.A.; Lee, E.A. The Semantics and Execution of a Synchronous Block-Diagram Language. Sci. Comput. Program. 2003, 48, 21–42. [Google Scholar] [CrossRef]
- Corbett, J.C.; Dean, J.; Epstein, M.; Fikes, A.; Frost, C.; Furman, J.; Ghemawat, S.; Gubarev, A.; Heiser, C.; Hochschild, P.; et al. Spanner: Google’s Globally-Distributed Database. In Proceedings of the Tenth Symposium on Operating System Design and Implementation 2012 (OSDI), Hollywood, CA, USA, 8–10 October 2012. [Google Scholar] [CrossRef]
- Lingua Franca Grammar. Lingua Franca Github. Available online: https://github.com/icyphy/lingua-franca/blob/master/xtext/org.icyphy.linguafranca/src/org/icyphy/LinguaFranca.xtext (accessed on 1 May 2020).
- Hardebolle, C.; Boulanger, F. ModHel’X: A Component-Oriented Approach to Multi- Formalism Modeling. In Proceedings of the MODELS 2007 Workshop on Multi- Paradigm Modeling, Nashville, TN, USA, 30 September–5 October 2007; Elsevier Science B.V.: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Ptolemaeus, C. System Design, Modeling, and Simulation Using Ptolemy II; Ptolemy.org: Berkeley, CA, USA, 2014. [Google Scholar]
- Jantsch, A. Modeling Embedded Systems and SoCs—Concurrency and Time in Models of Computation; Morgan Kaufmann: Burlington, MA, USA, 2003. [Google Scholar]
- Schneider, C.; Spönemann, M.; von Hanxleden, R. Just Model!—Putting Automatic Synthesis of Node-Link-Diagrams into Practice. In Proceedings of the IEEE Symposium on Visual Languages and Human-Centric Computing (VL/HCC ’13), San Jose, CA, USA, 15–19 September 2013; pp. 75–82. [Google Scholar] [CrossRef]
- Sirjani, M.; Khamespanah, E. On Time Actors. In Theory and Practice of Formal Methods—Essays Dedicated to Frank de Boer on the Occasion of His 60th Birthday; Springer: Cham, Switzerland, 2016; pp. 373–392. [Google Scholar]
- Khamespanah, E.; Sirjani, M.; Sabahi-Kaviani, Z.; Khosravi, R.; Izadi, M. Timed Rebeca schedulability and deadlock freedom analysis using bounded floating time transition system. Sci. Comput. Program. 2015, 98, 184–204. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. International Standard IEC 61131: Programmable Controllers, 4.0 ed.; IEC: Geneva, Switzerland, 2017. [Google Scholar]
- Berger, H. Automating with SIMATIC S7-1500: Configuring, Programming and Testing with STEP 7 Professional, 1st ed.; Publicis MCD Werbeagentur GmbH: Munich, Germany, 2014. [Google Scholar]
- Alur, R.; Dill, D.L. A Theory of Timed Automata. Theor. Comput. Sci. 1994, 126, 183–235. [Google Scholar] [CrossRef]
- Alur, R. Timed Automata. In Proceedings of the Computer Aided Verification, 11th International Conference, CAV ’99, Trento, Italy, 6–10 July 1999; Lecture Notes in Computer Science; Halbwachs, N., Peled, D.A., Eds.; Springer: Berlin/Heidelberg, Germany, 1999; Volume 1633, pp. 8–22. [Google Scholar]
- Yi, W. CCS + time = an interleaving model for real time systems. In Automata, Languages and Programming; Albert, J.L., Monien, B., Artalejo, M.R., Eds.; Springer: Berlin/Heidelberg, Germany, 1991; pp. 217–228. [Google Scholar]
- Popova-Zeugmann, L. Timed Petri Nets. In Time and Petri Nets; Springer: Berlin/Heidelberg, Germany, 2013; pp. 139–172. [Google Scholar]
- Krishna, S.N.; Trivedi, A. Hybrid Automata for Formal Modeling and Verification of Cyber-Physical Systems. arXiv 2015, arXiv:1503.04928. [Google Scholar]
- David, R.; Alla, H. On Hybrid Petri Nets. Discret. Event Dyn. Syst. 2001, 11, 9–40. [Google Scholar] [CrossRef]
- Cremona, F.; Lohstroh, M.; Broman, D.; Lee, E.A.; Masin, M.; Tripakis, S. Hybrid co-simulation: It’s about time. Softw. Syst. Model. 2019, 18, 1655–1679. [Google Scholar] [CrossRef]
- Khamespanah, E.; Khosravi, R.; Sirjani, M. An efficient TCTL model checking algorithm and a reduction technique for verification of timed actor models. Sci. Comput. Program. 2018, 153, 1–29. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).