Orhonormal Wavelet Bases on The 3D Ball Via Volume Preserving Map from the Regular Octahedron


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
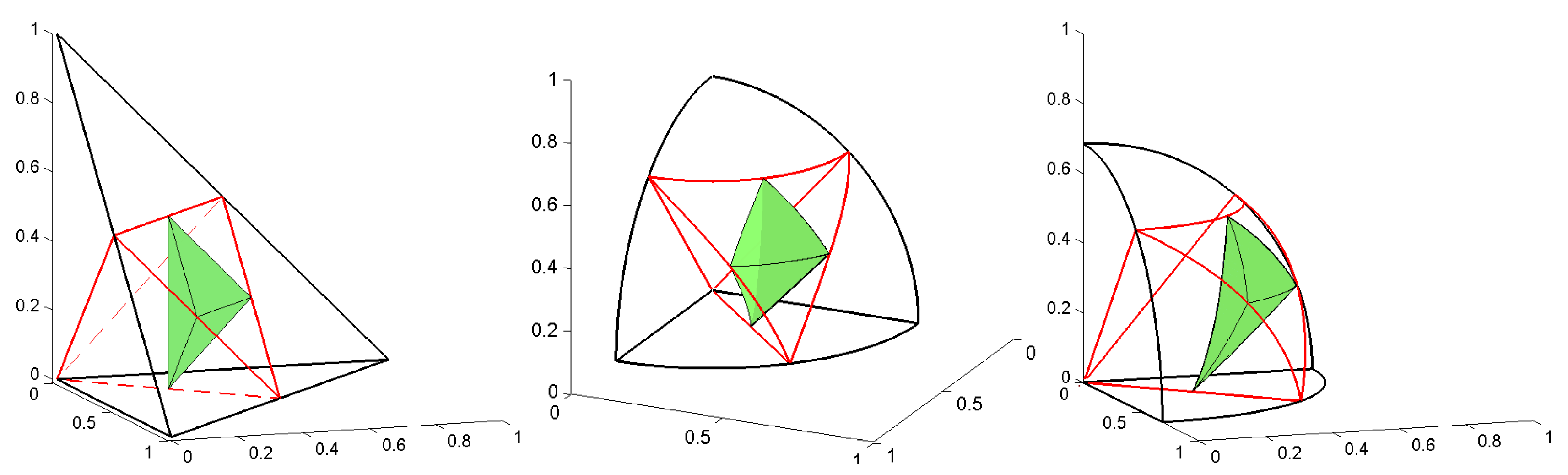
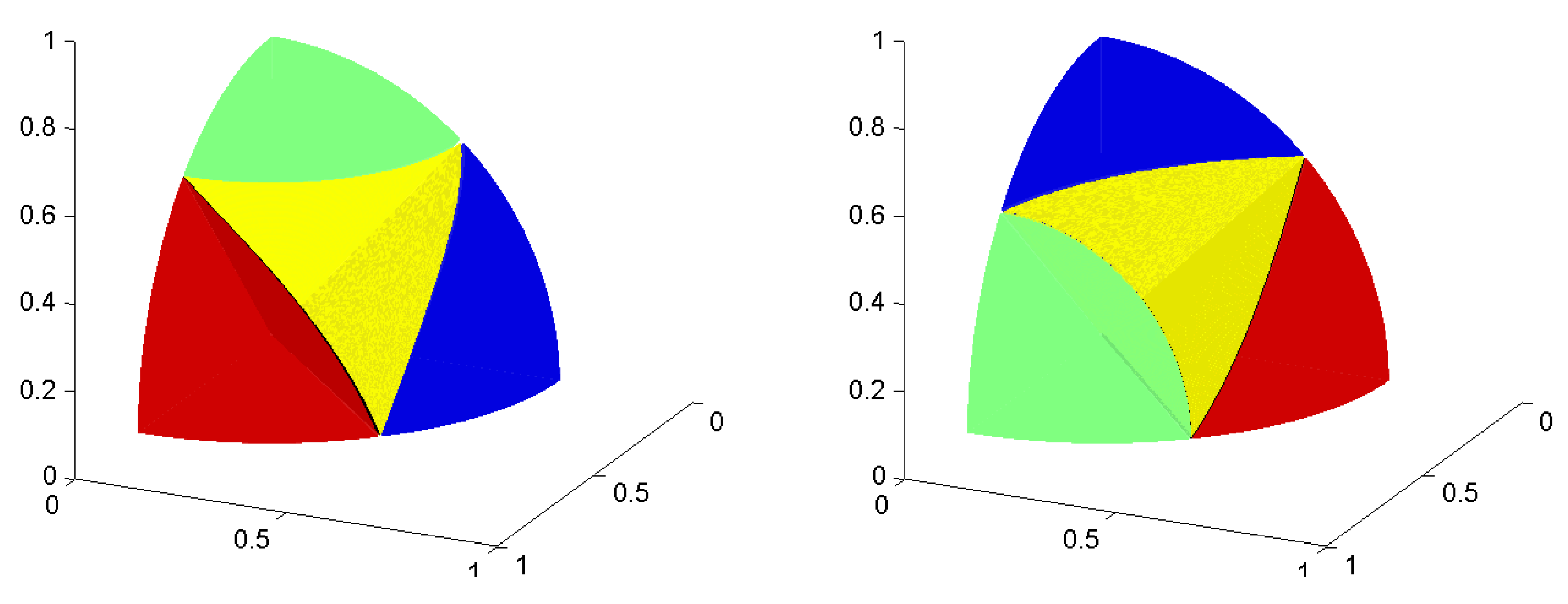
3. Construction of the Volume Preserving Map and Its Inverse
4. Uniform and Refinable Grids of the Regular Octahedron and of the Ball
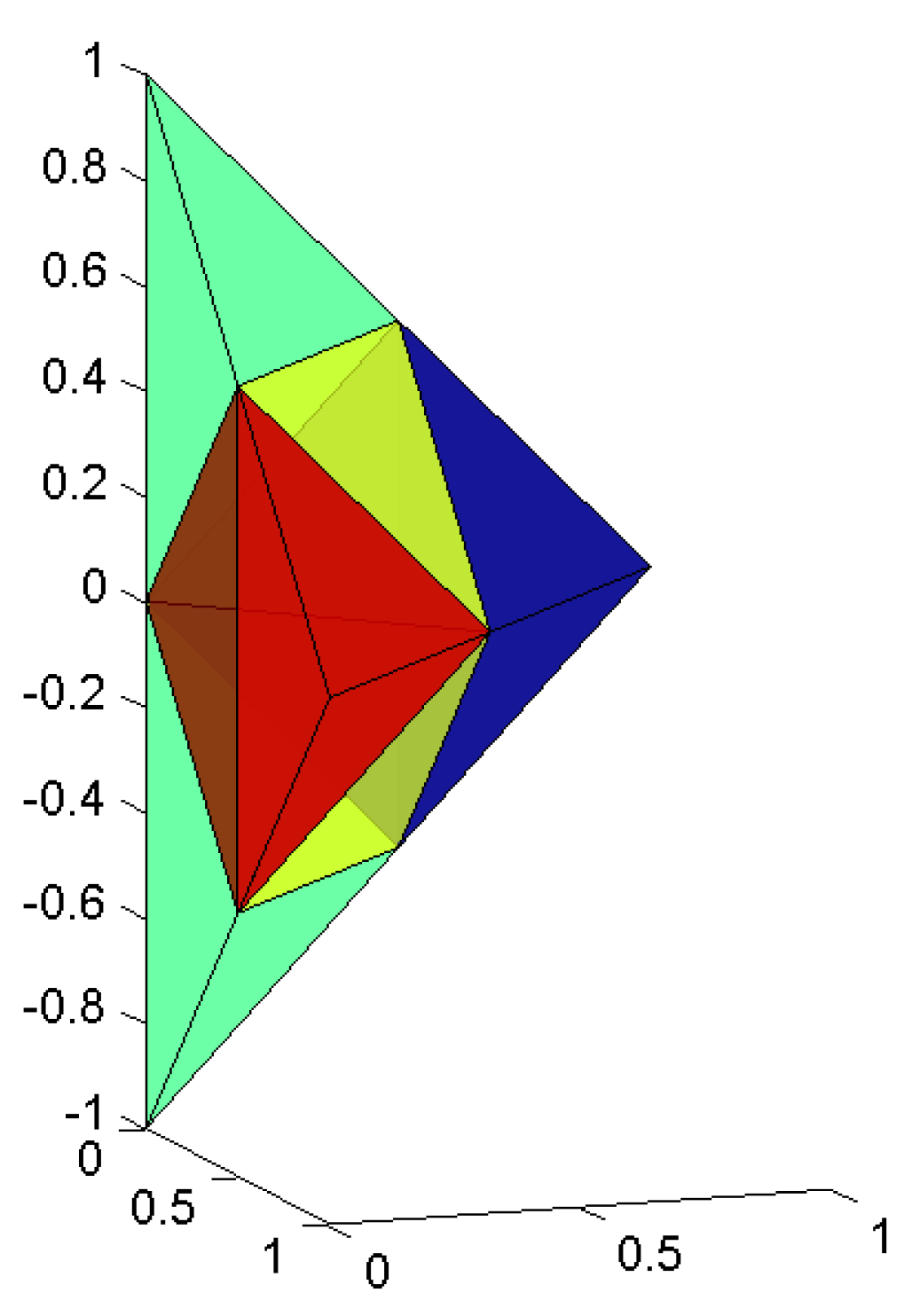
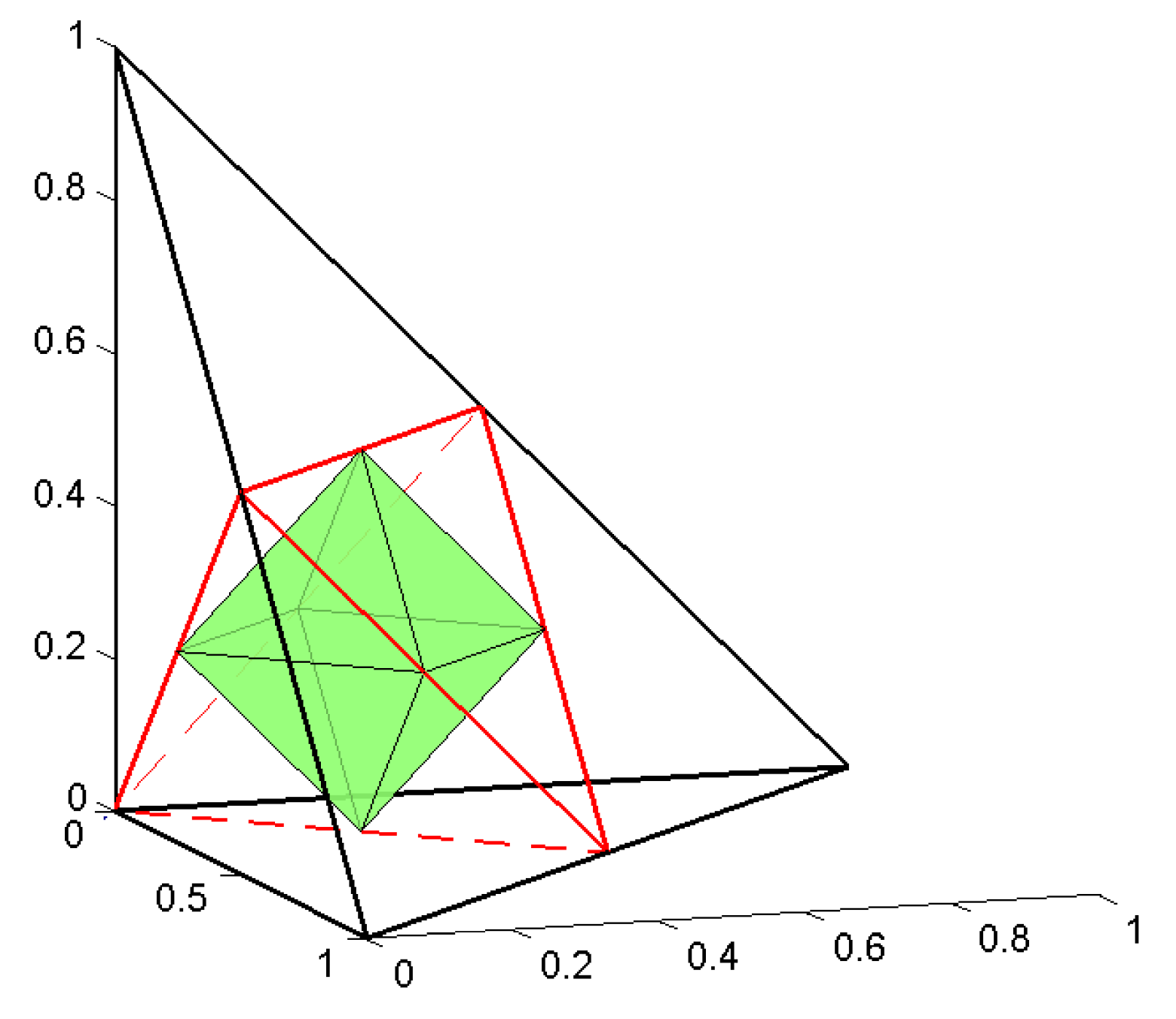
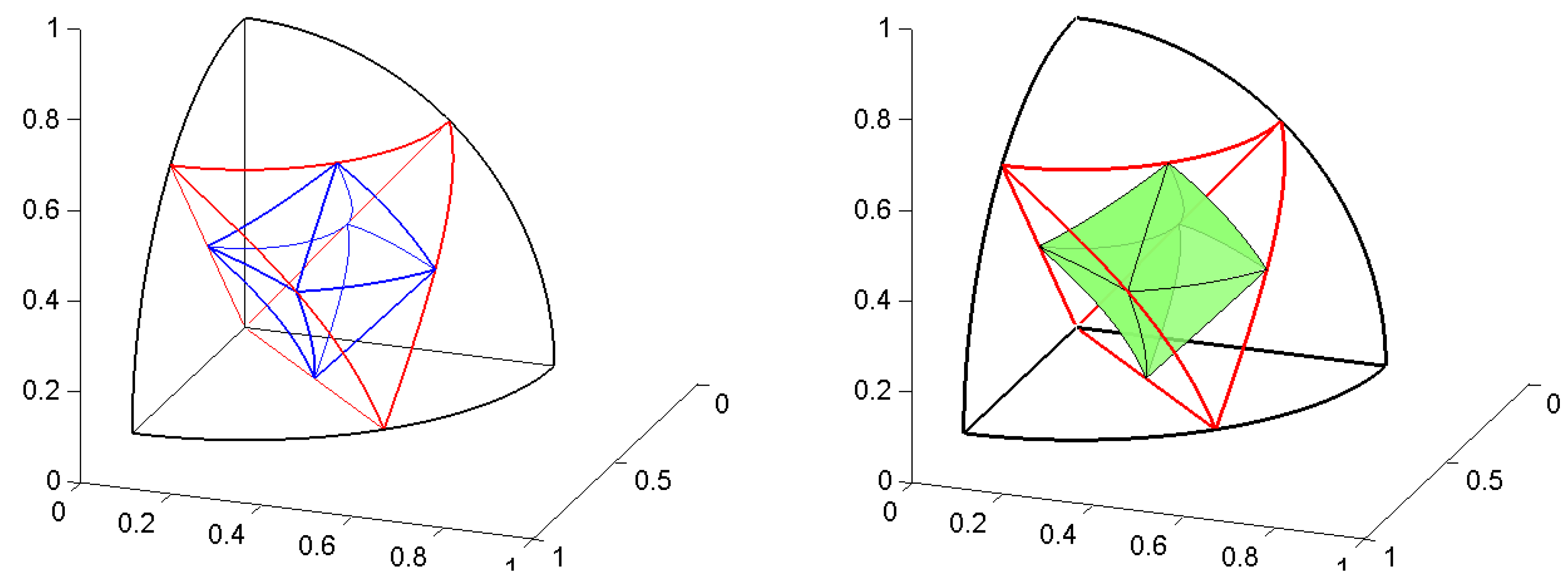
4.1. Refinement of the Octahedron
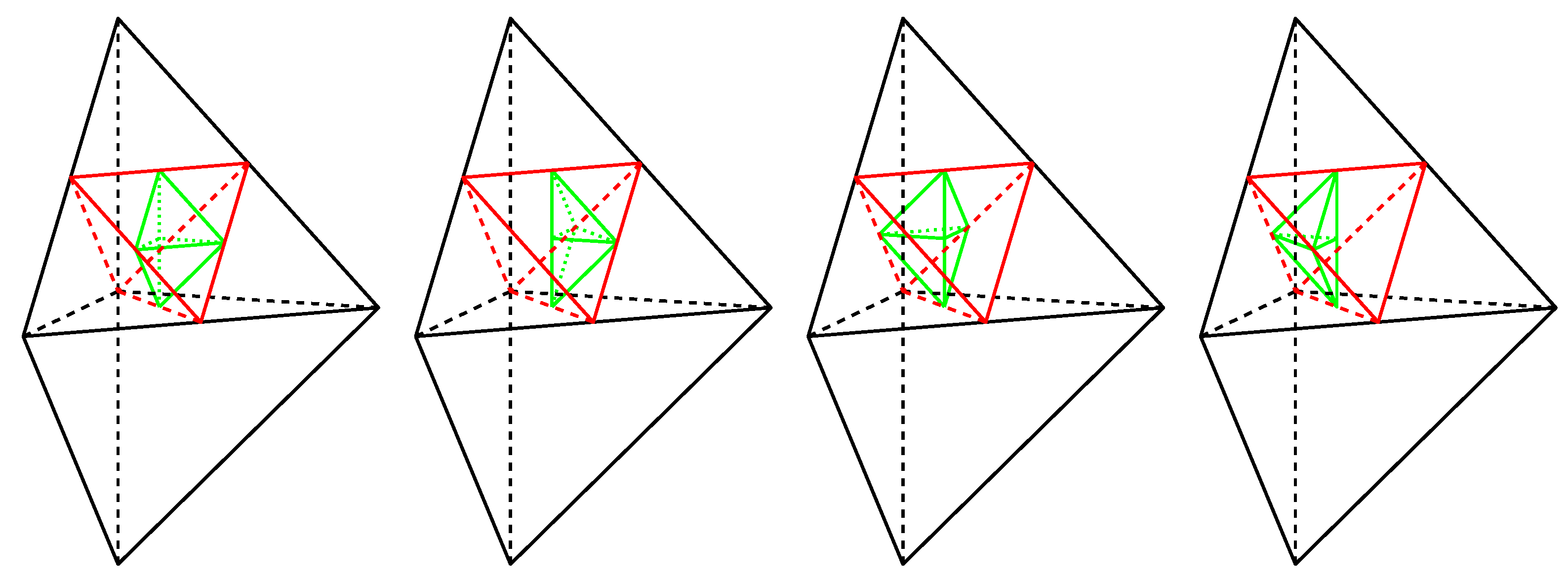
4.1.1. First Step of Refinement
4.1.2. Second Step of Refinement
4.1.3. The General Step of Refinement
4.2. Implementation Issues
4.3. Uniform and Refinable Grids of the Ball
5. Multiresolution Analysis and Piecewise Constant Orthonormal Wavelet Bases of and
- ,
- ,
- The set is an orthonormal basis of the space for each ,
6. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
References
- Moons, T.; van Gool, L.; Vergauwen, M. 3D reconstruction from multiple images part 1: Principles. Found. Trends Comput. Graph. Vis. 2010, 4, 287–404. [Google Scholar] [CrossRef]
- Kendrew, J.C.; Bodo, G.; Dintzis, H.M.; Parrish, R.G.; Wyckoff, H.; Phillips, D.C. A Three-Dimensional Model of the Myoglobin Molecule Obtained by X-Ray Analysis. Nature 1958, 181, 662–666. [Google Scholar] [CrossRef] [PubMed]
- Roşca, D.; Morawiec, A.; de Graef, M. A new method of constructing a grid in the space of 3D rotations and its applications to texture analysis. Model. Simul. Mater. Sci. Eng. 2014, 22, 075013. [Google Scholar] [CrossRef]
- Flenger, M.; Michel, D.; Michel, V. Harmonic spline-wavelets on the 3D ball and their application to the reconstruction of the Earth’s density distribution from gravitational data and arbitrary shaped satellite orbits. ZAMM J. Appl. Math. Mech. 2006, 86, 856–873. [Google Scholar]
- Simons, F.J.; Loris, I.; Nolet, G.; Daubechies, I.; Voronin, S.; Judd, J.S.; Vetter, P.A.; Charléty, J.; Vonesch, C. Solving or resolving global tomographic models with spherical wavelets, and the scale and sparsity of seismic heterogeneity. Geophys. J. Int. 2011, 187, 969–988. [Google Scholar] [CrossRef]
- Simons, F.J.; Loris, I.; Brevdo, E.; Daubechies, I. Wavelets and wavelet-like transforms on the sphere and their application to geophysical data inversion. In Wavelets and Sparsity XIV; Papadakis, M., Van de Ville, D., Goyal, V.K., Eds.; International Society for Optics and Photonics: San Diego, CA, USA, 2011; Volume 81380, pp. 1–15. [Google Scholar]
- Chow, A. Orthogonal and Symmetric Haar Wavelets on the Three-Dimensional Ball. Master’s Thesis, University of Toronto, Toronto, ON, Canada, 2010. [Google Scholar]
- Leistedt, B.; McEwen, J.D. Exact wavelets on the ball. IEEE Trans. Signal Process. 2012, 60, 6257–6269. [Google Scholar] [CrossRef]
- Loris, I.; Simons, F.J.; Daubechies, I.; Nolet, G.; Fornasier, M.; Vetter, P.; Judd, S.; Voronin, S.; Vonesch, C.; Charléty, J. A new approach to global seismic tomography based on regularization by sparsity in a novel 3D spherical wavelet basis. In Proceedings of the EGU General Assembly Conference Abstracts, ser. EGU General Assembly Conference Abstracts, Vienna, Austria, 2–7 May 2010; Volume 12, p. 6033. [Google Scholar]
- Michel, V. Wavelets on the 3 dimensional ball. Proc. Appl. Math. Mech. 2005, 5, 775–776. [Google Scholar] [CrossRef]
- Roşca, D. Locally supported rational spline wavelets on the sphere. Math. Comput. 2005, 74, 1803–1829. [Google Scholar] [CrossRef]
- Boscardin, L.B.; Castro, L.R.; Castro, S.M. Haar-Like Wavelets over Tetrahedra. J. Comput. Sci. Technol. 2017, 17, 92–99. [Google Scholar] [CrossRef]
- Pop, V.; Roşca, D. Generalized piecewise constant orthogonal wavelet bases on 2D-domains. Appl. Anal. 2011, 90, 715–723. [Google Scholar] [CrossRef]
- Roşca, D. Wavelet analysis on some surfaces of revolution via area preserving projection. Appl. Comput. Harm. Anal. 2011, 30, 272–282. [Google Scholar] [CrossRef]










© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Holhoş, A.; Roşca, D. Orhonormal Wavelet Bases on The 3D Ball Via Volume Preserving Map from the Regular Octahedron. Mathematics 2020, 8, 994. https://doi.org/10.3390/math8060994
Holhoş A, Roşca D. Orhonormal Wavelet Bases on The 3D Ball Via Volume Preserving Map from the Regular Octahedron. Mathematics. 2020; 8(6):994. https://doi.org/10.3390/math8060994
Chicago/Turabian StyleHolhoş, Adrian, and Daniela Roşca. 2020. "Orhonormal Wavelet Bases on The 3D Ball Via Volume Preserving Map from the Regular Octahedron" Mathematics 8, no. 6: 994. https://doi.org/10.3390/math8060994
APA StyleHolhoş, A., & Roşca, D. (2020). Orhonormal Wavelet Bases on The 3D Ball Via Volume Preserving Map from the Regular Octahedron. Mathematics, 8(6), 994. https://doi.org/10.3390/math8060994