Time-Varying Vector Norm and Lower and Upper Bounds on the Solutions of Uniformly Asymptotically Stable Linear Systems


Abstract
1. Introduction
Notations, Definitions and Preliminary Results
2. Main Results
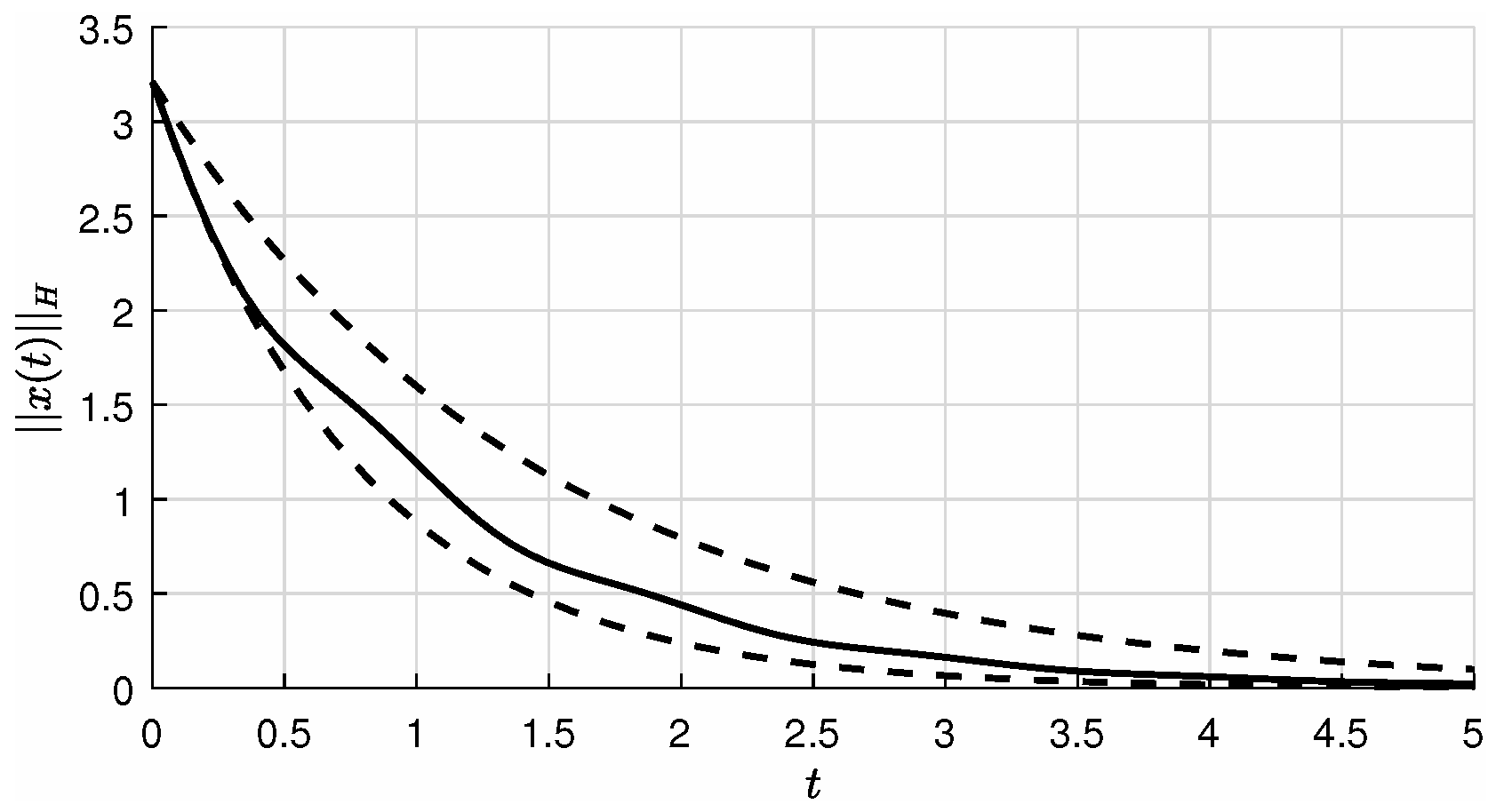
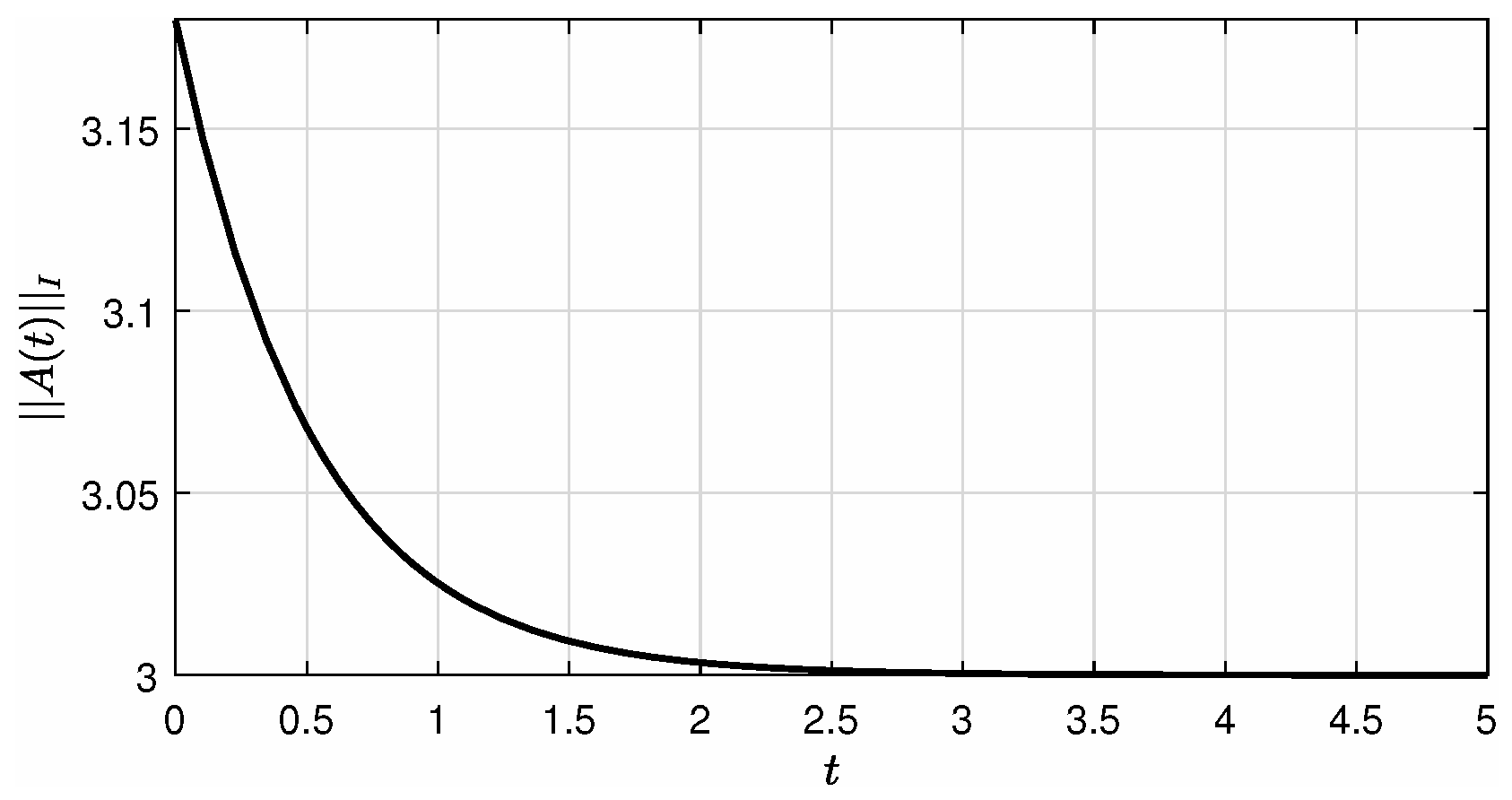
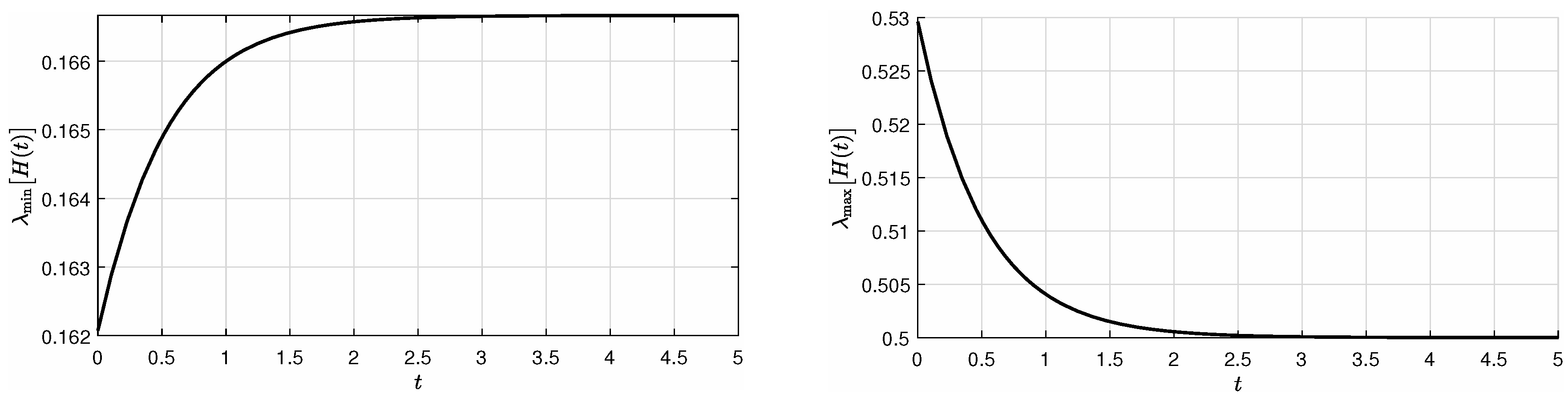
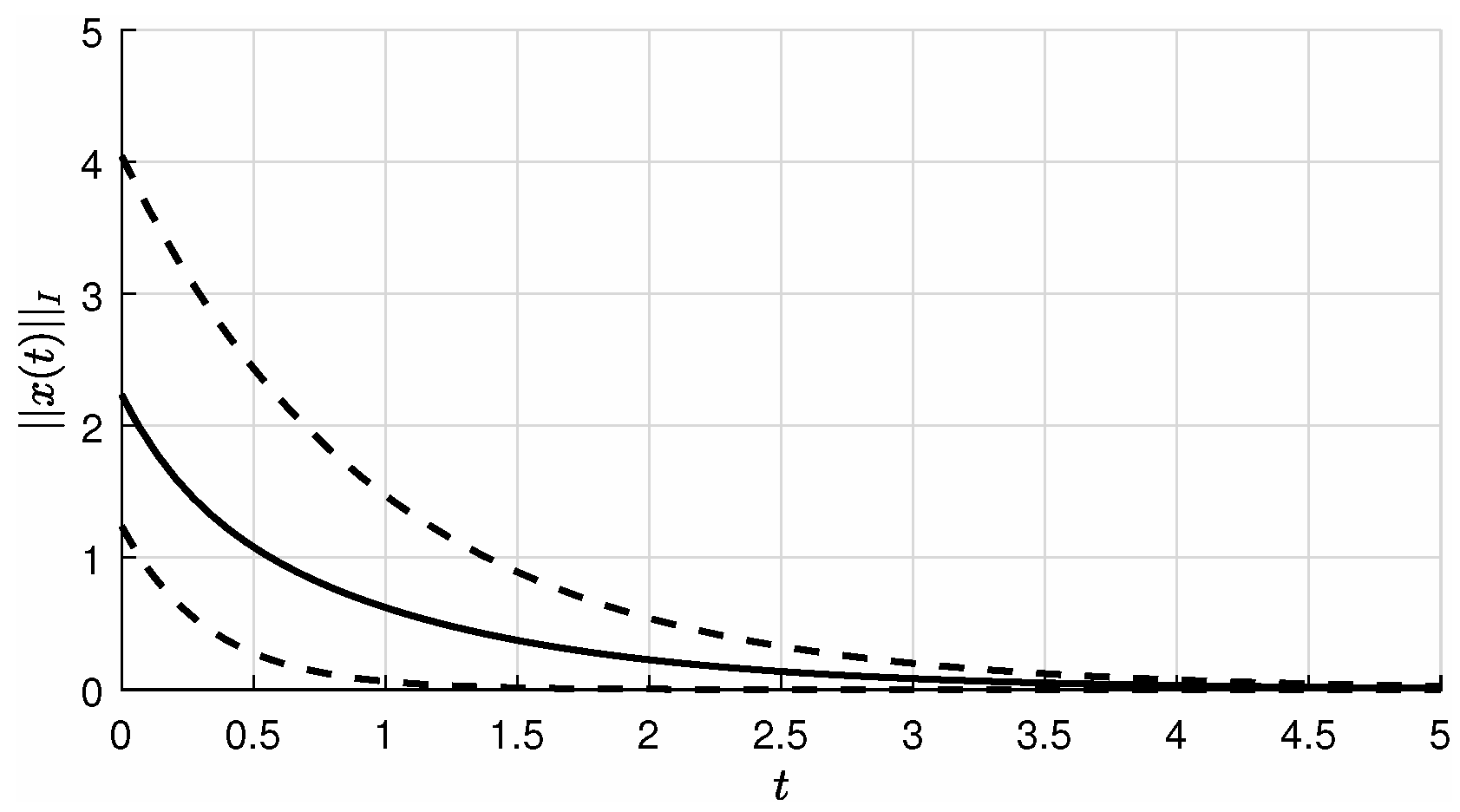
3. Simulation Results
4. Conclusions
Funding
Conflicts of Interest
References
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]
- Chicone, C. Ordinary Differential Equations with Applications; (Texts in Applied Mathematics); Springer: New York, NY, USA, 1999; Volume 34. [Google Scholar]
- Rugh, W.J. Linear System Theory, 2nd ed.; Prentice-Hall, Inc.: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Coppel, W.A. Stability and Asymptotic Behavior of Differential Equations; D. C. Heath and Company: Boston, MA, USA, 1965. [Google Scholar]
- Hu, G.-D.; Liu, M. The weighted logarithmic matrix norm and bounds of the matrix exponential. Linear Algebra Appl. 2004, 390, 145–154. [Google Scholar] [CrossRef]
- Zhou, B. On asymptotic stability of linear time-varying systems. Automatica 2016, 68, 266–276. [Google Scholar] [CrossRef]
- Afanas’ev, V.N.; Kolmanovskii, V.B.; Nosov, V.R. Mathematical Theory of Control Systems Design; Originally published by Kluwer Academic Publishers in 1996; Springer Science+Business Media: Dordrecht, The Netherlands, 1996. [Google Scholar]
- Dekker, K.; Verwer, J.G. Stability of Runge-Kutta Methods for Stiff Nonlinear Differential Equations; North-Holland: Amsterdam, The Netherlands, 1984. [Google Scholar]
- Desoer, C.A.; Haneda, H. The Measure of a Matrix as a Tool to Analyze Computer Algorithms for Circuit Analysis. IEEE Trans. Circuits Theory 1972, 19, 480–486. [Google Scholar] [CrossRef]
- Lohmiller, W.; Slotine, J.-J.E. On contraction analysis for non-linear systems. Automatica 1998, 34, 683–696. [Google Scholar] [CrossRef]
- Rüffer, B.S.; van de Wouw, N.; Mueller, M. Convergent systems vs. incremental stability. Syst. Control Lett. 2013, 62, 277–285. [Google Scholar]
- Harville, D.A. Matrix Algebra From a Statistician’s Perspective; Springer: New York, NY, USA, 2008. [Google Scholar]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Goh, B.S. Global stability in many-species systems. Am. Nat. 1977, 111, 135–143. [Google Scholar] [CrossRef]
- Coddington, E.A.; Levinson, N. Theory of Ordinary Differential Equations; McGraw-Hill: New York, NY, USA, 1955. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vrabel, R. Time-Varying Vector Norm and Lower and Upper Bounds on the Solutions of Uniformly Asymptotically Stable Linear Systems. Mathematics 2020, 8, 915. https://doi.org/10.3390/math8060915
Vrabel R. Time-Varying Vector Norm and Lower and Upper Bounds on the Solutions of Uniformly Asymptotically Stable Linear Systems. Mathematics. 2020; 8(6):915. https://doi.org/10.3390/math8060915
Chicago/Turabian StyleVrabel, Robert. 2020. "Time-Varying Vector Norm and Lower and Upper Bounds on the Solutions of Uniformly Asymptotically Stable Linear Systems" Mathematics 8, no. 6: 915. https://doi.org/10.3390/math8060915
APA StyleVrabel, R. (2020). Time-Varying Vector Norm and Lower and Upper Bounds on the Solutions of Uniformly Asymptotically Stable Linear Systems. Mathematics, 8(6), 915. https://doi.org/10.3390/math8060915