Abstract
In this paper, we propose two modified two-step proximal methods that are formed through the proximal-like mapping and inertial effect for solving two classes of equilibrium problems. A weak convergence theorem for the first method and the strong convergence result of the second method are well established based on the mild condition on a bifunction. Such methods have the advantage of not involving any line search procedure or any knowledge of the Lipschitz-type constants of the bifunction. One practical reason is that the stepsize involving in these methods is updated based on some previous iterations or uses a stepsize sequence that is non-summable. We consider the well-known Nash–Cournot equilibrium models to support our well-established convergence results and see the advantage of the proposed methods over other well-known methods.
1. Introduction
Let K to be a nonempty convex, closed subset of a Hilbert space and be a bifunction with for each The equilibrium problem for f upon K is defined as follows:
The equilibrium problem, pioneered by Blum and Oettli [1] as a unifying feature, is found to be involved more and more actively in a number of applications, such as poroelasticity for petroleum engineering [2], porous materials [3,4], financial analysis in economics [5,6], the reconstruction of images in imaging processing [7,8,9], telecommunication networks or public roads [10,11], and noncooperative games with the corresponding equilibrium concept by Nash [12]. The problem (EP) was also known as Ky Fan’s inequality [13] due to his contributions to this area of research. In fact, this problem did not receive sufficient consideration before this specific format. Nikaido characterized Nash equilibria [14] as the solutions of the problem (EP), and Gwinner designed it just as a tool to solve optimization and variational inequalities [15]; however, they did not deal with the problem itself in a separate setup.
The equilibrium problem involves many mathematical problems as a particular case, i.e., the variational inequality problems (VIP), fixed point problems, complementarity problems, optimization problems, saddle point problems, the Nash equilibrium of non-cooperative games, and the vector and scalar minimization problems (see [1,16]). Moreover, iterative methods are efficient tools to evaluate an approximate solution to an equilibrium problem. Several methods are well known for solving the problem (EP), for instance the proximal point method [17,18], projection methods [19], extragradient methods [20,21,22], the subgradient method [23,24,25], methods using the Bregman distance [26], and others [27,28,29,30].
The extragradient method was originally established by Korpelevich [31] for solving the variational inequality problem, which is a specific case of equilibrium problems. Korpelevich proved the weak convergence of the generated sequence under the hypotheses of Lipschitz continuity and pseudo-monotonicity on the operator. It involves determining two projections onto a closed convex set in each iteration of the method. If the closed convex set is simple enough, so that projections onto it are explicitly computed, then the extragradient method is exceptionally suitable. The modification of this method is the subgradient extragradient method [32], where the second projection is not taken over onto the closed convex set, but on a half space and provides a simple calculation.
In 2008, Tran et al. [33] proposed an extragradient method extension of the Korpelevich extragradient method [31] for dealing with the pseudo-monotone equilibrium problem in finite-dimensional spaces. It is crucial to determine two minimization problems on a closed convex set in each iteration of the method, and there is a reasonable fixed stepsize in minimization problems. Precisely, the iterative sequence is determined as follows:
where , and are Lipschitz constants. In 2016, Lyashko et al. [34] proposed an extension of the method (2) motivated by the result in [35]. Precisely, this iterative sequence is defined as follows:
where and are Lipschitz constants.
On the other hand, inertial-type methods are also important, based on the technique of the heavy-ball methods of the second-order time dynamic system. Polyak [36] began by taking inertial extrapolation as an acceleration method to solve smooth convex optimization problems. These methods are two-step iterative schemes, while the next iteration is evaluated by the use of the previous two iterations, and it could be viewed as an accelerating step of the iterative sequence. Several inertial-like algorithms for special cases of the problem (EP) can be found, for instance in [37,38,39,40].
This manuscript aims to introduce two modifications for the result proposed by Lyashko et al. [34] motivated by the results in [32,41,42]. These modifications are carried out by applying the inertial and subgradient strategy to speed up the iteration process and reduce the numerical computation. The first result incorporates the Lyashko two-step extragradient method with the inertial term, and a variable stepsize is followed that is updated on every single iteration by using the previous iterations. We prove a weak convergence theorem for our first proposed method through the standard assumptions on the cost bifunction. Furthermore, we come up with an alternative inertial-type method, which is another variant of the first method. The second method does not require any knowledge about the strongly pseudomonotone and Lipschitz-type constants of a bifunction, and the strong convergence of the method is achieved.
This paper is arranged as follows: Section 2 includes a number of definitions and basic results. Section 3 and Section 4 contain both of our methods involving the pseudomonotone and strongly pseudomonotone bifunction, as well as the convergence theorem. Section 5 covers the applications of our proposed results to the variational inequality problems. Section 6 illustrates numerical experiments in comparison with other existing algorithms using the Nash–Cournot equilibrium models to display the efficiency of our proposed algorithms.
2. Preliminaries
We make use of K as a closed, convex subset of the Hilbert space We denote and as the sequence strongly converges to and weakly converges to , respectively. In addition, indicates the set of solutions of the equilibrium problem within K and
Definition 1.
Let a convex function , and a subdifferential of g at is:
Definition 2.
The normal cone of K at is:
Definition 3.
The metric projection of u onto a closed, convex subset K of is defined as:
Now, we consider the concepts of the monotonicity of a bifunction (see [1,43]).
Definition 4.
Let a bifunction on K for be said to be:
- (1)
- strongly monotone if:
- (2)
- monotone if:
- (3)
- strongly pseudomonotone if:
- (4)
- pseudomonotone if:
- (5)
- satisfying the Lipschitz-type condition on K if there exist two numbers such that:
Lemma 1
([44]).Let K be a nonempty, closed, and convex subset of a Hilbert space and be a convex, subdifferentiable, and lower semi-continuous function. An element is a minimizer of a function g if and only if where and denote the subdifferential of g at u and the normal cone of K at u, respectively.
Lemma 2
([45]).Let and , then the following is true:
Lemma 3
([46]).Let , , and be a sequence in such that:
and also, there exists such that Then, we have:
- (i)
- with
- (ii)
Lemma 4
([47]).Let belong in and satisfying:
- (i)
- For exists;
- (ii)
- Every weak cluster point of the sequence belongs to K.
Then, converges weakly to an element of
Lemma 5
([48]).Let be sequences and with then
3. An Algorithm for the Pseudomonotone Equilibrium Problem and Its Convergence Analysis
The first method is developed by adding an inertial term to Algorithm 1 ([34], p. 4). It is important to note that the algorithm in the paper [34] cannot be used practically without knowledge of the Lipschitz-type constants of the bifunction. To overcome this situation, we suggest a new step-size rule that does not depend on Lipschitz-type constants. Rather, it depends on certain previous iterations and updates on each iteration. In a situation where Lipschitz constants are unknown or difficult to calculate, this approach is very useful. The following is our first algorithm in more detail:
| Algorithm 1 Two-step proximal iterative method for pseudomonotone EP. |
|
Assumption 1.
Let a bifunction satisfy the following conditions:
- (A1)
- f is pseudomonotone on K with for all ;
- (A2)
- f satisfies the Lipschitz-type condition on with and ;
- (A3)
- for each and with ;
- (A4)
- is subdifferentiable and convex on for each
Lemma 6.
We have the following inequality from Algorithm 1.
Proof.
By the value of with Lemma 1, we have:
Thus, for , there exists such that:
which gives:
By , we have This implies that:
From and by the subdifferential definition, we have:
□
Lemma 7.
We also have the following expression from Algorithm 1.
Proof.
The proof is identical to the proof of Lemma 6. □
Remark 1.
By taking and in Algorithm 1, we can get from Lemma 6 and Lemma 7, respectively.
Lemma 8.
We have the following relationship from Algorithm 1.
Proof.
Since this gives that Thus, we get:
By and the definition of subdifferential, we get:
Substituting in the above inequality, we get:
□
Lemma 9.
Let satisfy Assumption 1. Then, for each we have:
Proof.
It follows from Lemma 6 with that we have:
Thus, , and due to Condition (A1), we have This implies that:
By the definition, implies that:
both sides have been multiplied with such that:
Since , then from Lemma 8, we have:
We have the following facts:
and:
From above facts with Expression (13) complete the proof. □
Theorem 1.
The sequences , and are generated by Algorithm 1 and weakly converge to where:
Proof.
Adding to both sides the value in Lemma 9, we have:
By the definition of in Algorithm 1, we get:
The value of with Lemma 2 gives:
Next, we compute:
Due to the above implies that:
Due to our supposition and from the above, there exists an and such that:
The sequence is non-increasing for . By the value of , we have:
From the value we have:
The expression (31) for implies that:
Let Expression (33) converts into:
Due to the assumption on for some
Let us fix and Expressions (38) and (39) for Summing them, we have:
and letting in the above expression leads to:
The above expression also implies that:
By using the triangle inequality with Expression (42), we have:
Next, from Expression (14) with (19):
and the above expression with (35), (41), and Lemma 3 implies that the limit of and exists for each meaning that the sequences , , and are bounded. Next, we have to prove that each weak sequential limit point of the sequence belongs to Let z be any sequential weak cluster point of the sequence i.e., a weak convergent subsequence of converging to which also implies that also converge weakly to Now, our aim to show that Using Lemma 6, the definition of (10), and Lemma 8, we obtain:
whereas y is an any element in As a result, with (36), (37), (42), and (43) and due to the boundness of , the above inequality goes to zero. By given the assumption (A3), and we get:
Since then It gives that z belongs to By Lemma 4, we show that , and converge weakly to as □
4. An Algorithm for the Strongly Pseudomonotone Equilibrium Problem and Its Convergence Analysis
The second algorithm is also another variant of Algorithm 1 [34] that can solve the strongly pseudomonotone equilibrium problem. However, the advantage of this algorithm is that it provides strong convergence by using a diminishing stepsize sequence. Let be a sequence satisfying the following:
Assumption 2.
Let a bifunction satisfy the following conditions:
- (B1)
- f is strongly pseudomonotone on K with ;
- (B2)
- f satisfies the Lipschitz-type condition on with and ;
- (B3)
- is sub-differentiable and convex on for each fixed
The Algorithm 2 is described below.
| Algorithm 2 Two-step proximal iterative method for strongly pseudomonotone EP. |
|
Lemma 10.
Assume satisfying Assumption 2. For each we have:
Proof.
Follow the same step as in the proof of Lemma 9, and term will appear due to the strongly pseudomonotonicity of a bifunction. □
Theorem 2.
Assume that a bifunction with Assumption 2. Let be sequences in generated by Algorithm 2, where the sequence is non-decreasing and Then, the sequence , and strongly converges to in
Proof.
By Lemma 10 and adding on both sides:
From the value of in Algorithm 2, we have:
By the definition of , we have:
From the above substitution, Expression (56) turns into:
Next, we substitute:
By the above expression and (57):
It follows that:
Since then there exist an such that:
Due to the above condition, we have:
The above implies that the sequence is nonincreasing for From the value of , we have:
Similarly, for the value of with the above expression, we have:
Next, Expression (63) implies that:
Now, we fix a natural number and consider the above inequality for all numbers Summing them using (67), we obtain:
and letting in the above expression, we have:
The above expression implies that:
By Expression (72), we obtain:
Now, we show that the sequence strongly converges to From the condition on for all , the following still holds:
It follows from the above condition and Lemma 10 that:
From the above expression with (65) and (70), this implies that:
for some Now, letting in the above expression, we obtain:
From Lemma 5 and Expression (78), this implies that:
5. Application to Variational Inequality Problems
Now, we study the applications of our proposed methods to solve the pseudomonotone and strongly monotone variational inequality problems. An operator is considered to be:
- (1)
- strongly pseudomonotone on K if
- (2)
- pseudomonotone on K if
- (3)
- satisfying being L-Lipschitz continuous on K if
The variational inequality problem is defined as:
Note: Let bifunction for all Then, the equilibrium problem converts into the above variational inequality problem with It follows from in Algorithm 1 and the above definition of bifunction f that:
The value of reduces to the following projection:
Assumption 3.
Let satisfy the following conditions:
- (G1)
- G is strongly pseudomonotone on K, and is a nonempty solution set;
- (G2)
- G is pseudomonotone on K, and is a nonempty solution set;
- (G3)
- G is L-Lipschitz continuous upon K for positive constant
- (G4)
- for every and satisfying
Corollary 1.
Let satisfy () as in Assumption 3. Assume , and is the sequence generated in the following way:
- (i)
- Choose , and Set:
- (ii)
- Assume , and are known for Construct a half space:Compute:The stepsize sequence is updated as follows:
Thus, the sequence , and converges weakly to of
Corollary 2.
Let satisfy () as in Assumption 3. Assume and are the sequences generated as follows:
- (i)
- Choose , and Set:
- (ii)
- Assume that and are known for Construct a half space:Compute:The stepsize sequence satisfies the following hypothesis:
Thus, the sequence , and converges strongly to of
6. Numerical Experiments
Now, we discuss two economy models to examine the efficiency of our proposed methods. For the numerical experiments, we wrote our algorithms using MATLAB programs (MATLAB R2018b) evaluated on a PC Intel(R) Core(TM)i5-6200 CPU @ 2.30 GHz 2.40 GHz, RAM 8.00 GB.
6.1. Nash–Cournot Equilibrium Model of Electricity Markets
We considered the equilibrium model of electricity markets [20]. We assumed that there were three companies that were generating electricity Companies 1, 2, and 3 had generating units named as , and respectively. Suppose that denotes the generating power of the unit for We also assume that the price p of the electricity is defined as The charge of the producing j unit is written as:
with and The values of , and are set in Table 1. Consider that the profit of the firm i is:
where and feasible set with and given in Table 2. First, we describe the f equilibrium function as:
where:

Table 1.
The different values of the constants.
Table 2.
The constraint set values.
The above discussed model is viewed as the following equilibrium problem:
For Algorithm 1 (Algo1), we use and Figure 1, Figure 2, Figure 3 and Figure 4 and Table 3 and Table 4 describe the numerical results for error term () regarding different values of and
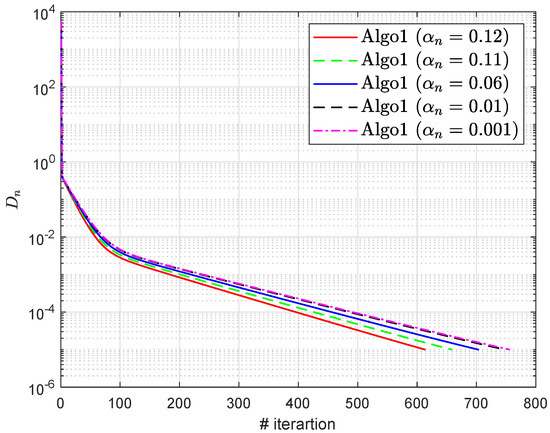
Figure 1.
Section 6.1: Algorithm 1’s (Algo1) behavior with respect to different values of
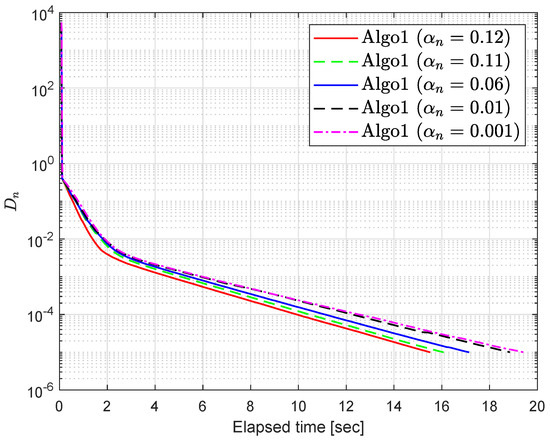
Figure 2.
Section 6.1: Algorithm 1’s behavior with respect to different values of
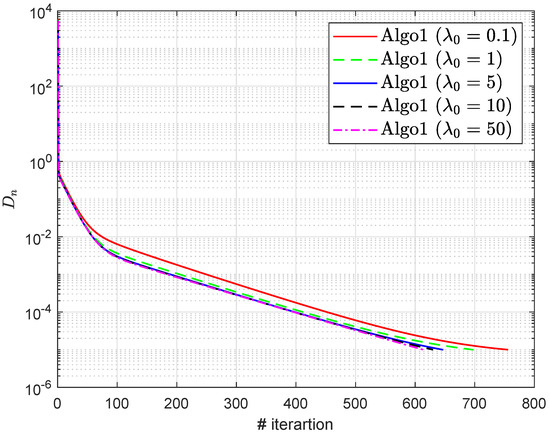
Figure 3.
Section 6.1: Algorithm 1’s behavior with respect to different values of
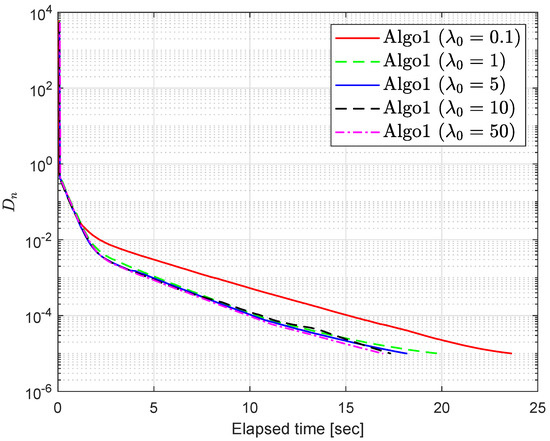
Figure 4.
Section 6.1: Algorithm 1’s behavior with respect to different values of
Algorithm 1 Comparison with Other Existing Methods
- (i)
- For the extragradient method (EgM) [33], and
- (ii)
- For Algorithm 1 (EgIA) [41], and
- (iii)
- For the two-step proximal algorithm (TSPA) [34], and ,
- (iv)
- For Algorithm 2 (ETSPA) [41], , , and
- (v)
- For Algorithm 1 (Algo1), , and the error term
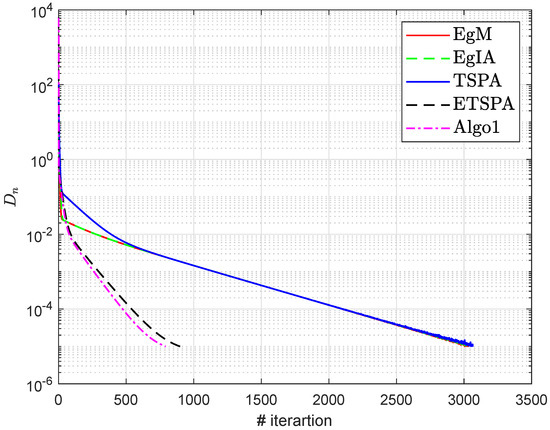
Figure 5.
Section 6.1: Algorithm 1 comparison with existing methods.
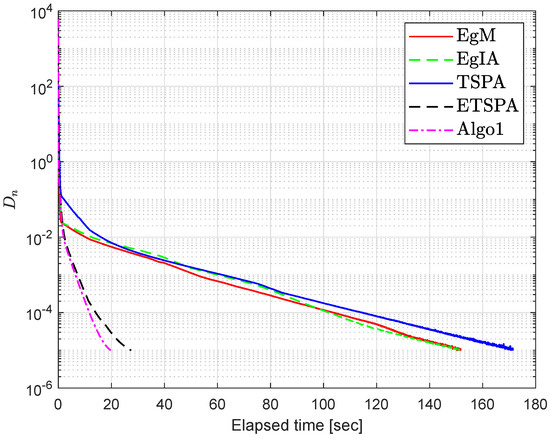
Figure 6.
Section 6.1: Algorithm 1 comparison with existing methods.
6.2. Nash–Cournot Oligopolistic Equilibrium Model
We consider that there are n companies that are generating the same commodity. Suppose that in vector u represents the amount of commodity production corresponding to each company The price function depends on the value of such that where and This price function is affine and decreasing. The profit function with is the tax and production charges for Suppose that with is the set of possible actions or strategies corresponding to each company In particular, each company seeks to achieve its maximum profit by considering the subsequent level of production on the premise that the production of the other companies is an input parameter. The technique also deals with this form of model based on the well-known Nash equilibrium principle. A point is the equilibrium point such that:
where vector means that is replaced with Next, assume that with , and the problem of finding a Nash equilibrium point of the model can be considered as follows:
It follows from [33] that the bifunction f becomes as follows:
where:
with
Algorithm 2 Comparison with Other Existing Methods
- For the extragradient method (EgMSP) [49], and
- For another method (EgIASP) [42], , and .
- For Algorithm 2 (Algo2), , and .
Figure 7, Figure 8, Figure 9 and Figure 10 and Table 6 illustrate the numerical results for the stopping criterion.
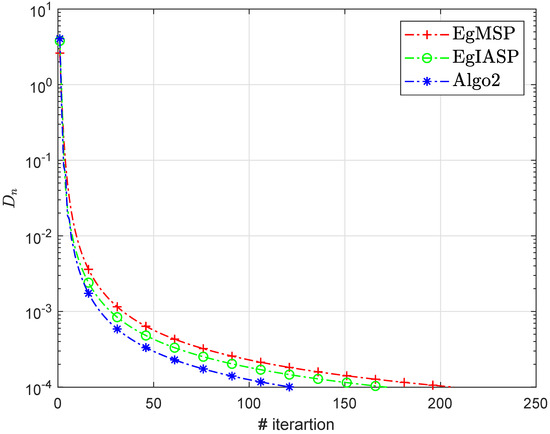
Figure 7.
Section 6.2: Algorithm 2 comparison with existing methods.
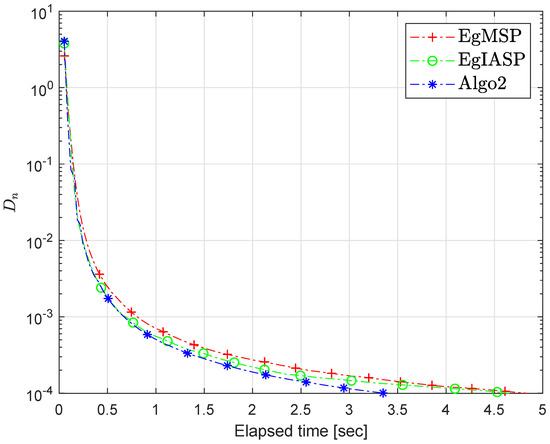
Figure 8.
Section 6.2: Algorithm 2 comparison with existing methods.
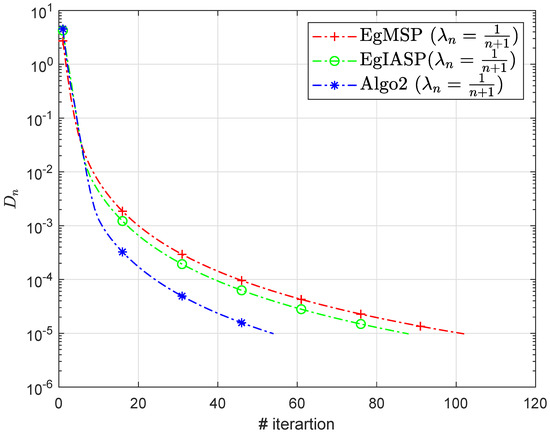
Figure 9.
Section 6.2: Algorithm 2 comparison with existing methods.
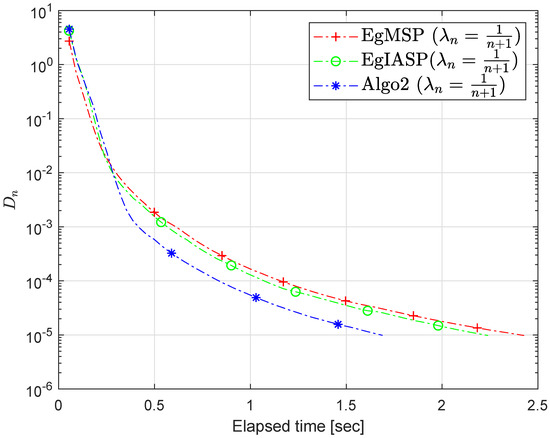
Figure 10.
Section 6.2: Algorithm 2 comparison with existing methods.
7. Conclusions
In this study, two proximal-like algorithms were proposed to solve equilibrium problems involving a pseudomonotone and strongly pseudomonotone bifunction with the Lipschitz-type condition on a bifunction. We used a new step size rule that did not depend on the Lipschitz-type constant information. It was identified that the methods with an inertial term worked better than without an inertial term.
Author Contributions
Conceptualization, H.u.R. and P.K.; Methodology, H.u.R., P.K., I.K.A., M.S. and Z.S.; Investigation, H.u.R., P.K., I.K.A., M.S. and Z.S.; Writing–original draft preparation, H.u.R., P.K. and Z.S.; Writing–review and editing, H.u.R., P.K., I.K.A., M.S. and Z.S.; Visualization, H.u.R., P.K., I.K.A., M.S. and Z.S.; Software, I.K.A., M.S. and Z.S.; Supervision, P.K. and I.K.A.; Funding Acquisition, P.K. All authors have read and agree to the published version of the manuscript.
Funding
This research work was financially supported by King Mongkut’s University of Technology Thonburi through the ‘KMUTT 55th Anniversary Commemorative Fund’. Moreover, this project was supported by Theoretical and Computational Science (TaCS) Center under Computational and Applied Science for Smart research Innovation research Cluster (CLASSIC), Faculty of Science, KMUTT. In particular, Habib ur Rehman was financed by the Petchra Pra Jom Doctoral Scholarship Academic for Ph.D. Program at KMUTT [grant number 39/2560].
Acknowledgments
The first author would like to thank the “Petchra Pra Jom Klao Ph.D. Research Scholarship from King Mongkut’s University of Technology Thonburi”. We are very grateful to the editor and the anonymous referees for their valuable and useful comments, which helps in improving the quality of this work.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Blum, E. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Long, G.; Liu, S.; Xu, G.; Wong, S.W.; Chen, H.; Xiao, B. A Perforation-Erosion Model for Hydraulic-Fracturing Applications. SPE Prod. Oper. 2018, 33, 770–783. [Google Scholar] [CrossRef]
- Xiao, B.; Wang, W.; Zhang, X.; Long, G.; Fan, J.; Chen, H.; Deng, L. A novel fractal solution for permeability and Kozeny-Carman constant of fibrous porous media made up of solid particles and porous fibers. Powder Technol. 2019, 349, 92–98. [Google Scholar] [CrossRef]
- Xiao, B.; Zhang, X.; Jiang, G.; Long, G.; Wang, W.; Zhang, Y.; Liu, G. Kozeny–carman constant for gas flow through fibrous porous media by fractal-monte carlo simulations. Fractals 2019, 27, 1950062. [Google Scholar] [CrossRef]
- Arrow, K.J.; Debreu, G. Existence of an Equilibrium for a Competitive Economy. Econometrica 1954, 22, 265. [Google Scholar] [CrossRef]
- Cournot, A.A. Recherches Sur Les Principes MathéMatiques de la Théorie des Richesses; L. Hachette: New York, NY, USA, 1838. [Google Scholar]
- Wernecke, S.J. Maximum Entropy Image Reconstruction. IEEE Trans. Comput. 1977, 26, 351–364. [Google Scholar] [CrossRef]
- Kundur, D.; Hatzinakos, D. Blind image deconvolution. IEEE Signal Process. Mag. 1996, 13, 43–64. [Google Scholar] [CrossRef]
- Gharehkhani, S.; Sadeghinezhad, E.; Kazi, S.N.; Yarmand, H.; Badarudin, A.; Safaei, M.R.; Zubir, M.N.M. Basic effects of pulp refining on fiber properties—A review. Carbohydr. Polym. 2015, 115, 785–803. [Google Scholar] [CrossRef]
- Nagurney, A. Network Economics–A Variational inequality approach 412. Adv. Comput. Econ. Kluwer Acad. Publ. 1993. [Google Scholar] [CrossRef]
- Patriksson, M. The Traffic Assignment Problem: Models and Methods; Courier Dover Publications: Chicago, IL, USA, 2015. [Google Scholar]
- Nash, J. Non-Cooperative Games. Ann. Math. 1951, 54, 286. [Google Scholar] [CrossRef]
- Fan, K. A Minimax Inequality and Applications, Inequalities III; Shisha, O., Ed.; Academic Press: New York, NY, USA, 1972. [Google Scholar]
- Nikaidô, H.; Isoda, K. Note on non-cooperative convex game. Pac. J. Math. 1955, 5, 807–815. [Google Scholar] [CrossRef]
- Gwinner, J. On the penalty method for constrained variational inequalities. Optim. Theory Algorithms 1981, 86, 197–211. [Google Scholar]
- Giannessi, F.; Maugeri, A.; Pardalos, P.M. Equilibrium Problems: Nonsmooth Optimization and Variational Inequality Models; Springer Science & Business Media: Berlin, Germany, 2006; Volume 58. [Google Scholar]
- Konnov, I. Application of the Proximal Point Method to Nonmonotone Equilibrium Problems. J. Optim. Theory Appl. 2003, 119, 317–333. [Google Scholar] [CrossRef]
- Moudafi, A. Proximal point algorithm extended to equilibrium problems. J. Nat. Geom. 1999, 15, 91–100. [Google Scholar]
- Muu, L.D.; Quoc, T.D. Regularization Algorithms for Solving Monotone Ky Fan Inequalities with Application to a Nash–Cournot Equilibrium Model. J. Optim. Theory Appl. 2009, 142, 185–204. [Google Scholar] [CrossRef]
- Quoc, T.D.; Anh, P.N.; Muu, L.D. Dual extragradient algorithms extended to equilibrium problems. J. Glob. Optim. 2011, 52, 139–159. [Google Scholar] [CrossRef]
- Takahashi, S.; Takahashi, W. Viscosity approximation methods for equilibrium problems and fixed point problems in Hilbert spaces. J. Math. Anal. Appl. 2007, 331, 506–515. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Abubakar, A.B.; Cho, Y.J. The extragradient algorithm with inertial effects extended to equilibrium problems. Comput. Appl. Math. 2020, 39. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Cho, Y.J.; Yordsorn, P. Weak convergence of explicit extragradient algorithms for solving equilibirum problems. J. Inequalities Appl. 2019, 2019. [Google Scholar] [CrossRef]
- Santos, P.; Scheimberg, S. An inexact subgradient algorithm for equilibrium problems. Comput. Appl. Math. 2011, 30, 91–107. [Google Scholar]
- ur Rehman, H.; Kumam, P.; Je Cho, Y.; Suleiman, Y.I.; Kumam, W. Modified Popov’s explicit iterative algorithms for solving pseudomonotone equilibrium problems. Optim. Methods Softw. 2020, 1–32. [Google Scholar] [CrossRef]
- Reich, S.; Sabach, S. Three Strong Convergence Theorems Regarding Iterative Methods for Solving Equilibrium Problems in Reflexive Banach Spaces. Contemp. Math. 2012. [Google Scholar] [CrossRef]
- Argyros, I.K.; Hilout, S. Computational Methods in Nonlinear Analysis: Efficient Algorithms, Fixed Point Theory and Applications; World Scientific: Singapore, 2013. [Google Scholar]
- Akbari, O.A.; Safaei, M.R.; Goodarzi, M.; Akbar, N.S.; Zarringhalam, M.; Shabani, G.A.S.; Dahari, M. A modified two-phase mixture model of nanofluid flow and heat transfer in a 3-D curved microtube. Adv. Powder Technol. 2016, 27, 2175–2185. [Google Scholar] [CrossRef]
- Karimipour, A.; Nezhad, A.H.; D’Orazio, A.; Esfe, M.H.; Safaei, M.R.; Shirani, E. Simulation of copper–water nanofluid in a microchannel in slip flow regime using the lattice Boltzmann method. Eur. J. Mech. B Fluids 2015, 49, 89–99. [Google Scholar] [CrossRef]
- Togun, H.; Safaei, M.; Sadri, R.; Kazi, S.; Badarudin, A.; Hooman, K.; Sadeghinezhad, E. Numerical simulation of laminar to turbulent nanofluid flow and heat transfer over a backward-facing step. Appl. Math. Comput. 2014, 239, 153–170. [Google Scholar] [CrossRef]
- Korpelevich, G. The extragradient method for finding saddle points and other problems. Matecon 1976, 12, 747–756. [Google Scholar]
- Censor, Y.; Gibali, A.; Reich, S. The Subgradient Extragradient Method for Solving Variational Inequalities in Hilbert Space. J. Optim. Theory Appl. 2010, 148, 318–335. [Google Scholar] [CrossRef]
- Tran, D.Q.; Dung, M.L.; Nguyen, V.H. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar] [CrossRef]
- Lyashko, S.I.; Semenov, V.V. A New Two-Step Proximal Algorithm of Solving the Problem of Equilibrium Programming. In Optimization and Its Applications in Control and Data Sciences; Springer International Publishing: Berlin, Germany, 2016; pp. 315–325. [Google Scholar]
- Popov, L.D. A modification of the Arrow-Hurwicz method for search of saddle points. Math. Notes Acad. Sci. USSR 1980, 28, 845–848. [Google Scholar] [CrossRef]
- Polyak, B.T. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Kumam, W.; Shutaywi, M.; Jirakitpuwapat, W. The Inertial Sub-Gradient Extra-Gradient Method for a Class of Pseudo-Monotone Equilibrium Problems. Symmetry 2020, 12, 463. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Argyros, I.K.; Deebani, W.; Kumam, W. Inertial Extra-Gradient Method for Solving a Family of Strongly Pseudomonotone Equilibrium Problems in Real Hilbert Spaces with Application in Variational Inequality Problem. Symmetry 2020, 12, 503. [Google Scholar] [CrossRef]
- ur Rehman, H.; Kumam, P.; Argyros, I.K.; Alreshidi, N.A.; Kumam, W.; Jirakitpuwapat, W. A Self-Adaptive Extra-Gradient Methods for a Family of Pseudomonotone Equilibrium Programming with Application in Different Classes of Variational Inequality Problems. Symmetry 2020, 12, 523. [Google Scholar] [CrossRef]
- Van Hieu, D.; Quy, P.K. Explicit iterative algorithms for solving equilibrium problems. Calcolo 2019, 56, 11. [Google Scholar] [CrossRef]
- Van Hieu, D. Convergence analysis of a new algorithm for strongly pseudomonotone equilibrium problems. Numer. Algorithms 2018, 77, 983–1001. [Google Scholar] [CrossRef]
- Bianchi, M.; Schaible, S. Generalized monotone bifunctions and equilibrium problems. J. Optim. Theory Appl. 1996, 90, 31–43. [Google Scholar] [CrossRef]
- Tiel, J.V. Convex Analysis; John Wiley: Hoboken, NJ, USA, 1984. [Google Scholar]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: New York, NY, USA, 2011; Volume 408. [Google Scholar]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73, 591–598. [Google Scholar] [CrossRef]
- Ofoedu, E. Strong convergence theorem for uniformly L-Lipschitzian asymptotically pseudocontractive mapping in real Banach space. J. Math. Anal. Appl. 2006, 321, 722–728. [Google Scholar] [CrossRef]
- Hieu, D.V. New extragradient method for a class of equilibrium problems in Hilbert spaces. Appl. Anal. 2018, 97, 811–824. [Google Scholar] [CrossRef]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).