Abstract
This paper is concerned with the output synchronization problems for a class of delayed complex dynamical networks. Based on the invariant principle of functional differential equations and Lyapunov stability theory, the feedback controller and parameter update laws are constructed for a large-scale network with uncertainties. The general complex delayed network can achieve synchronization by adaptively adjusting their feedback gains. Numerical examples are presented to further verify the effectiveness of the proposed control scheme.
1. Introduction
Ever since small-world and scale-free features were discovered in many real-world networks (see [1,2] and the references therein) synchronization in complex dynamical network has attracted much attention for its potential application in [3,4,5,6,7,8,9,10,11,12,13]. It is motivated by a broad area of potential applications: Networks of robots, formations of flying and underwater vehicles, control of industrial, electrical, communication, and production networks, etc. Thus, synchronization control for a general complex dynamical network becomes a new subject of active research. By introducing various complex dynamical network models, fruitful theoretical and applicable results have been studied for the corresponding synchronization issues in [14,15,16,17]. It is well known that under some extremely strict conditions, complex dynamical network models can achieve synchronization, especially for chaotic synchronization. In the past decades, many control methods have been proposed for chaotic synchronization, see [11,18,19] and the references therein. Min et al. [18] studied the synchronization of three different chaotic systems by using the theory of discontinuous dynamical systems. Chen et al. designed a nonlinear synchronization controller with exponential function, and realized the projection synchronization of two magnetically controlled memory chaotic systems in [19]. However, these methods focused mainly on synchronization of two identical systems, which is quite different from synchronization of complex networks. A key reason is that there are numerous mutual coupled cells in complex networks, with each one being a subsystem. What should be pointed out is that the coupling strengths of many complex networks are more likely to vary; they can even vary widely, e.g., [20].
Besides, there exist time delays in transmission due to limited transmission speeds or heavy traffic. It is almost impossible to learn the exact information of strength between cells or time delays, especially for a large-scale network. The existences of time delays can deteriorate the control performance and cause instability, see, e.g., [21,22,23,24,25,26,27,28,29]. In [21], an adaptive feedback strategy is proposed for a class of Takagi–Sugeno fuzzy complex networks with unknown topological structure and distributed time-varying delay, and the designed controller is only related to the dynamic behavior of directly related nodes. The authors of [22] researched the exponential synchronization of second-order nodes in dynamic networks with time-varying communication delays and switched communication topologies. The problem of synchronization control of complex dynamic networks with time-varying delays is studied in [27], a study in which is designed the synchronization controller of sampling system, which can make the generated synchronization error system stable. In [28], a global exponential synchronization criterion considering discrete time communication unit and delay is obtained by introducing a larger decision matrix. Hence, how to determine the appropriate feedback gain becomes an unavoidable problem if one adopts common error feedback control schemes. Actually, adaptive adjustment mechanisms are conveniently applied to the oretical analysis of uncertain closed-loop controlled systems. Motivated by the above discourse and examination, this paper will concentrate on adaptive output synchronization of general complex dynamical networks with time-varying delays.
The main contributions are listed as follows:
- (i).
- An appropriate adaptive output feedback synchronize problem is successfully solved for every cell output of general complex networks with time-varying delays.
- (ii).
- Based on the invariant principle of functional differential equations, the feedback controller and parameter update laws are constructed for a large-scale network with uncertainties. In addition, the general complex delayed network can achieve synchronization by adaptively adjusting their feedback gains.
- (iii).
- Numerical examples are presented to demonstrate the effectiveness of the control scheme. Compared with the state-feedback case, the output synchronization of the general complex dynamical network is closer to the real application.
The rest of this article is arranged as follows. The general delayed complex dynamical networks are introduced in Section 2. The adaptive output feedback synchronization criteria and corresponding numerical simulations are given in Section 3 and Section 4, respectively. Section 5 concludes the paper.
2. Preliminaries and Model Description
Throughout the whole paper, R is the set of real numbers; denotes the set of all non-negative real numbers; is the i-dimensional Euclidean space; denotes the Euclidean norm of a vector or its induced matrix norm and stands for the absolute value of a function or constant.
Lemma 1
(see [30]). For any vectors x, and positive definite matrix , the following linear matrix inequality holds: .
The design goal of this paper is to design an output feedback controller for a class of nonlinear time-varying delay coupled complex dynamical network to achieve synchronous control. Without loss of generality, we consider a general dynamical network with time-varying delays [11], the network consists of N identical cells with diffusion linear coupling, each of which is an n-dimensional dynamic subsystem.
One considers
where is continuously differentiable, governing the dynamics of the isolated cell, stands for the state variable of the i-th cell, represents the time delay, and is the controller, is the output matrix with an inverse, the coupling matrices describe the topology of the network and coupling strength between cells at time t, with (the diagonal entries can be defined in the same way) being
Obviously, all entries of coupling matrices are time-varying bounded uncertainties such that
with m, . For , one has
where is a bounded matrix such that with .
Remark 1.
Since is a bounded matrix, there must exist a constant such that , where is the eigenvalue of the corresponding matrix.
The objective of this paper is to achieve an asymptotical output synchronization for (1). Such that
where is the synchronous output of the whole network. Consider
is one solution of an isolated cell can be an equilibrium point, a periodic orbit, and an aperiodic orbit, or a chaotic orbit in the phase space. To realize the objective, the following assumption is imposed on System (1).
Assumption A1.
In general delayed systems, time delay , usually written as τ for simplification, satisfies
where and are both positive constants.
Remark 2.
This paper mainly studies a general dynamical network with time-varying delays. What should be emphasized is that Assumption 1 is reasonable and widely applied. Assumption 1 is generally and commonly adopted, see [7,8,10,11]. If the delay is too large or the delay changes too fast, the controller will fail. Assumption 1 can limit the time variation of the system to a certain range, and the model closer to the real application.
3. Output Synchronization in Complex Delayed Networks
Consider Systems (1) and (6), the following error dynamical system can be achieved:
where . Choose Lyapunov function,
where , , is an unit matrix, and l is the normal constant to be determined. The time derivative of along the error dynamic system trajectory (8) is given by
where , . According to (5), one has
It is obvious that . Then, (14) can be rewritten as
On the other hand, since (15) holds and , one can obtain
by properly selecting , where , such that , and
Therefore, it holds that
Thus, it can be received that
where is the minimal eigenvalue of . Substituting System (11) into System (9), one can get
where .
Now, we give the main result in the following theorem.
Theorem 1.
With the controller
and the parameter updating laws
with , the general delayed network (1) is synchronous with starting from any initial condition and , where and are both diagonal matrices with being selected by
and for all .
Proof.
Using Lemma 1, (12), and , one can yield
Selecting
one can get . Obviously, if and only if . According to the invariant principle of functional differential [31], as . Thus, the output error of (8) is asymptotically stable under the adaptive controllers (13) and updating laws (14). Namely, the dynamical network (1) achieves output synchronization, which completes the proof. □
Remark 3.
In fact, one cannot always find a diagonal matrix to satisfy (15). A sufficient condition is that all diagonal entries of an output matrix are not equal to zero. Let us explain how to select .
Consider a linear matrix inequality
where is an diagonal matrix to be determined, and can be any matrix whose entries for all .
Let be a large enough positive constant with .
- (1)
- If , it is easy to select .
- (2)
- If , one can select which is satisfied
One supposes that holds by selecting proper for all and . If , can be rewritten as
where , , , and
Since
one has . By solving the above inequality, one can easily derive that k has solutions if and only if
(17) holds if
Since is large enough, (18) always holds. Therefore, one gets .
4. Numerical Simulations
In this part, the nonlinear examples are presented to further verify the effectiveness of the proposed adaptive feedback. Consider a nine-node network with each cell being an identical Lorenz system, which is described by
where , , . The system has a bounded, zero volume, globally attracting set [32]. Therefore, the state trajectories with are always bounded and continuously differentiable, and is a bounded matrix. The output matrix C is
Given time delay and the coupling matrices being
where .
By exactly following the design procedue in Section 3 with
for all . According to Theorem 1, the synchronous solution of the obtained dynamical network is globally asymptotically stable.
If the isolated cell is a Chua’s oscillator, which is given by
where , , , , and
with and . One can easily derive
Thus, Chua’s oscillator satisfies the Lipschitz condition. The synchronous error is shown in Figure 1, where . Obviously, the zero error is globally asymptotically stable for (8). Thus, the designed controller can make the closed-loop systems asymptotically stable.
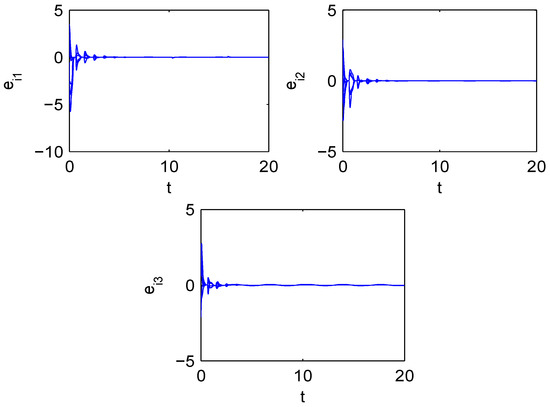
Figure 1.
The errors between the cell output and synchronous output, with a chaotic Chua system being a cell.
5. Conclusions
An appropriate adaptive output feedback synchronize problem is introduced for a general dynamical network with time-varying delays. The general complex delayed network can achieve synchronization by adaptively adjusting their feedback gains. Based on the invariant principle of functional differential equations, the feedback controller and parameter update laws are constructed for a large-scale network with uncertainties. Numerical examples are given to demonstrate validity of the control scheme. A problem under investigation is how to design a controller with better performance in terms of timing and speed of synchronous control for System (1).
Author Contributions
Formal analysis, L.G. and N.D.; Writing–original draft, L.G. and S.L.; Software, S.L.; Writing–review & editing, L.G., N.D. and S.L.; Project administration, N.D. and X.K. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Natural Science Foundation of China (Nos. 61573172, 61773185), the Postgraduate Research & Practice Innovation Program of Jiangsu Province(No. SJCX19 _ 0752) and the Natural Science Foundation of the Jiangsu Higher Education Institutions of China (No. 18KJB413002).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Watts, D.J.; Strogatz, S.H. Collective dynamics of small world networks. Nature 1998, 393, 440–442. [Google Scholar] [CrossRef] [PubMed]
- Barabasi, A.L.; Albert, R. Emergence of scaling in random networks. Science 1999, 286, 509–512. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.R.; Wang, X.F.; Li, X. Intruduction to Complex Networks: Nodels, Structures and Dynamics; Higher Education Press: Beijing, China, 2015. [Google Scholar]
- Wang, X.F.; Chen, G.R. Synchronization in scale-free dynamical networks: Robustness and fragility. IEEE Trans. Circuit Syst. 2002, 49, 54–62. [Google Scholar] [CrossRef]
- Mata-Machuca, J.L.; Ricardo, A.L. Adaptative synchronization in multi-output fractional-order complex dynamical networks and secure communications. Eur. Phys. J. Plus 2018, 133, 14. [Google Scholar] [CrossRef]
- Lu, J.H.; Chen, G.R. A time-varying complex dynamical network model and its controlled synchronization criteria. IEEE Trans. Autom. Control 2005, 50, 841–846. [Google Scholar]
- Zhou, J.; Chen, T. Synchronization in general complex delayed dynamical networks. IEEE Trans. Circuit Syst. 2006, 53, 733–744. [Google Scholar] [CrossRef]
- Yu, T.H.; Cao, D.Q.; Yang, Y.; Liu, S.Q.; Huang, W.H. Robust synchronization of impulsively coupled complex dynamical network with delayed nonidentical nodes. Chaos Solitons Fractals 2016, 87, 92–101. [Google Scholar] [CrossRef]
- Liu, J.B.; Zhao, J.; Zhu, Z.X.; Cao, J.D. On the Normalized Laplacian and the Number of Spanning Trees of Linear Heptagonal Networks. Mathematics 2019, 7, 314. [Google Scholar] [CrossRef]
- Rajchakit, G.; Pratap, A.; Raja, R.; Cao, J.D.; Alzabut, J.; Huang, C.X. Hybrid Control Scheme for Projective Lag Synchronization of Riemann-Liouville Sense Fractional Order Memristive BAM NeuralNetworks with Mixed Delays. Mathematics 2019, 7, 759. [Google Scholar] [CrossRef]
- Song, C.; Fei, S.M.; Cao, J.D.; Huang, C.X. Robust Synchronization of Fractional-Order Uncertain Chaotic Systems Based on Output Feedback Sliding Mode Control. Mathematics 2019, 7, 599. [Google Scholar] [CrossRef]
- Tang, Z.; Park, J.H.; Lee, T.H.; Feng, J. Mean square exponential synchronization for impulsive coupled neural networks with time-varying delays and stochastic disturbances. Complexity 2016, 20, 190–202. [Google Scholar] [CrossRef]
- Wang, Y.W.; Wei, Y.W.; Liu, X.K.; Zhou, N.; Cassandras, C.G. Optimal persistent monitoring using second-order agents with physical constraints. IEEE Trans. Autom. Control 2018, 64, 3239–3252. [Google Scholar] [CrossRef]
- Gao, Q.L.; Fan, C.X.; Ke, L.; Zhou, Y.J. Synchronization in general complex dynamical network with inner-coupling faults. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 7143–7147. [Google Scholar]
- Guan, Y.; Wu, Y.Q.; Wu, H.; Li, Y.Z.; He, S.H. Synchronization of Complex Dynamical Networks with Actuator Saturation by Using Sampled-Data Control. Circuits Syst. Signal Process. 2019, 38, 5508–5527. [Google Scholar] [CrossRef]
- Wen, G.H.; Yu, W.W.; Chen, M.Z.Q.; Yu, X.H. Pinning a Complex Network to Follow a Target System with Predesigned Control Inputs. IEEE Trans. Syst. Man Cybern. Syst. 2018, 99, 1–12. [Google Scholar] [CrossRef]
- AKumari, S.; Chugh, R.; Cao, J.D.; Huang, C.X. Multi Fractals of Generalized Multivalued Iterated Function Systems in b-Metric Spaces with Applications. Mathematics 2019, 7, 967. [Google Scholar] [CrossRef]
- Min, F.H.; Ma, H.Y.; Lv, Y.M.; Zhang, L. The coexistence of chaotic synchronization with three different nonautonomous systems under constraint conditions. Eur. Phys. J. Special Top. 2019, 228, 1493–1514. [Google Scholar] [CrossRef]
- Chen, J.Y.; Min, F.H.; Lv, Y.M.; Ye, B.M. Projective Synchronization for Heterogeneous Active Magnetic Controlled Memristor-Based Chaotic Systems. In Proceedings of the 17th International Symposium on Distributed Computing and Applications for Business Engineering and Science, Nancy, France, 4–6 July 2018; pp. 64–67. [Google Scholar]
- Dong, H.L.; Zhou, J.M.; Wang, B.C.; Xiao, M.Q. Synchronization of Nonlinearly and Stochastically Coupled Markovian Switching Networks via Event-Triggered Sampling. IEEE Trans. Neural Netw. Learn. Syst. 2018, 99, 1–10. [Google Scholar] [CrossRef]
- Yuan, X.X.; Li, J.J. Synchronization of T-S fuzzy complex dynamical networks with unknown topological structure and distributed time-varying delay. In Proceedings of the 36th Chinese Control Conference, Dalian, China, 26–28 July 2017; pp. 975–979. [Google Scholar]
- Yu, M.; Shang, W.P.; Chen, Z.G. Exponential Synchronization for Second-Order Nodes in Complex Dynamical Network with Communication Time Delays and Switching Topologies. J. Control Sci. Eng. 2017. [Google Scholar] [CrossRef]
- Duan, N.; Min, H.F.; Shu, Z.; Wang, S.L. A combined NN and dynamic gain-based approach to further stabilize nonlinear time-delay systems. Neural Comput. Appl. 2019, 31, 2183–2193. [Google Scholar] [CrossRef]
- Li, X.D.; Yang, X.Y.; Song, S.J. Lyapunov conditions for finite-time stability of time-varying time-delay systems. Automatica 2019, 103, 135–140. [Google Scholar] [CrossRef]
- Li, X.D.; Wu, J.H. Stability of nonlinear differential systems with state-dependent delayed impulses. Automatica 2016, 64, 63–69. [Google Scholar] [CrossRef]
- Yang, X.Y.; Li, X.D. Finite-time stability of linear non-autonomous systems with time-varying delays. Adv. Differ. Equ. 2018, 101, 1–10. [Google Scholar] [CrossRef]
- Su, L.; Ye, D.; Yang, X. Dissipative-based sampled-data synchronization control for complex dynamical networks with time-varying delay. J. Franklin Inst. 2017, 354, 6855–6876. [Google Scholar] [CrossRef]
- Que, H.Y.; Fang, M.; Wu, Z.G.; Su, H.Y. Exponential Synchronization via Aperiodic Sampling of Complex Delayed Networks. IEEE Trans. Syst. Man Cybern. Syst. 2018, 99, 1–9. [Google Scholar] [CrossRef]
- Alsaedi, A.; Usha, M.; Ali, M.S.; Ahmad, B. Finite-time synchronization of sampled-data Markovian jump complex dynamical networks with additive time-varying delays based on dissipative theory. J. Comput. Appl. Math. 2020, 368, 112578. [Google Scholar] [CrossRef]
- Huang, D. Synchronization-based estimation of all parameters of chaotic systems from time series. Phys. Rev. E. 2004, 69, 067201. [Google Scholar] [CrossRef] [PubMed]
- Hale, J.K. Theory of Functional Differential Equation; Springer: New York, NY, USA, 1977. [Google Scholar]
- Sparrow, C. The Lorenz Equations: Bifurations, Chaos and Strange Attractors; Springer: New York, NY, USA, 1982. [Google Scholar]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).