Modeling of Strength Characteristics of Polymer Concrete Via the Wave Equation with a Fractional Derivative

Abstract
1. Introduction
2. Materials and Methods
3. Results
4. Discussion
- -
- The solution to problems (1)–(4) is presented.
- -
- The first seven eigenvalues of problems (10)–(11) are found in the case α = 1.47; c = 1.8; , which gives us an opportunity to model the deformation-strength characteristics of polymer concrete (dian and dichloroanhydride-1,1-dichloro-2,2-diethylene) under the influence of the gravity force, with an accuracy of two decimal places.
- -
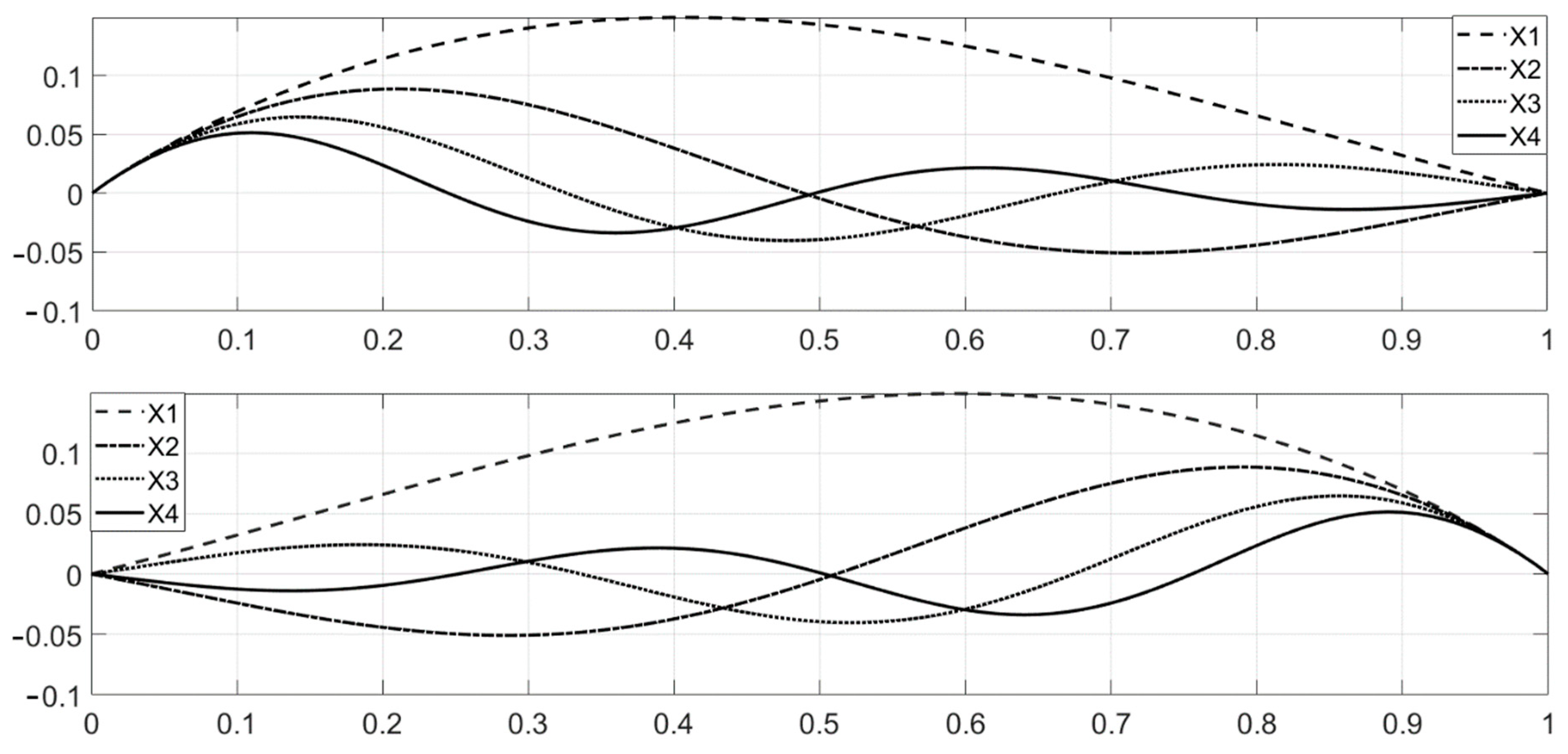
- The functions from the system , which is biorthogonal to the system of eigenfunctions of problems (10)–(11), in the case α = 1.47; c = 1.8; , are found numerically and their graphs are plotted.
- -
- The inner products of the eigenfunctions of problems (10)–(11) and functions from the biorthogonal system in the case α = 1.47; c = 1.8; , are calculated and the obtained result confirms the correctness of replacing series (13) and (17) with partial sums in the calculations.
- -
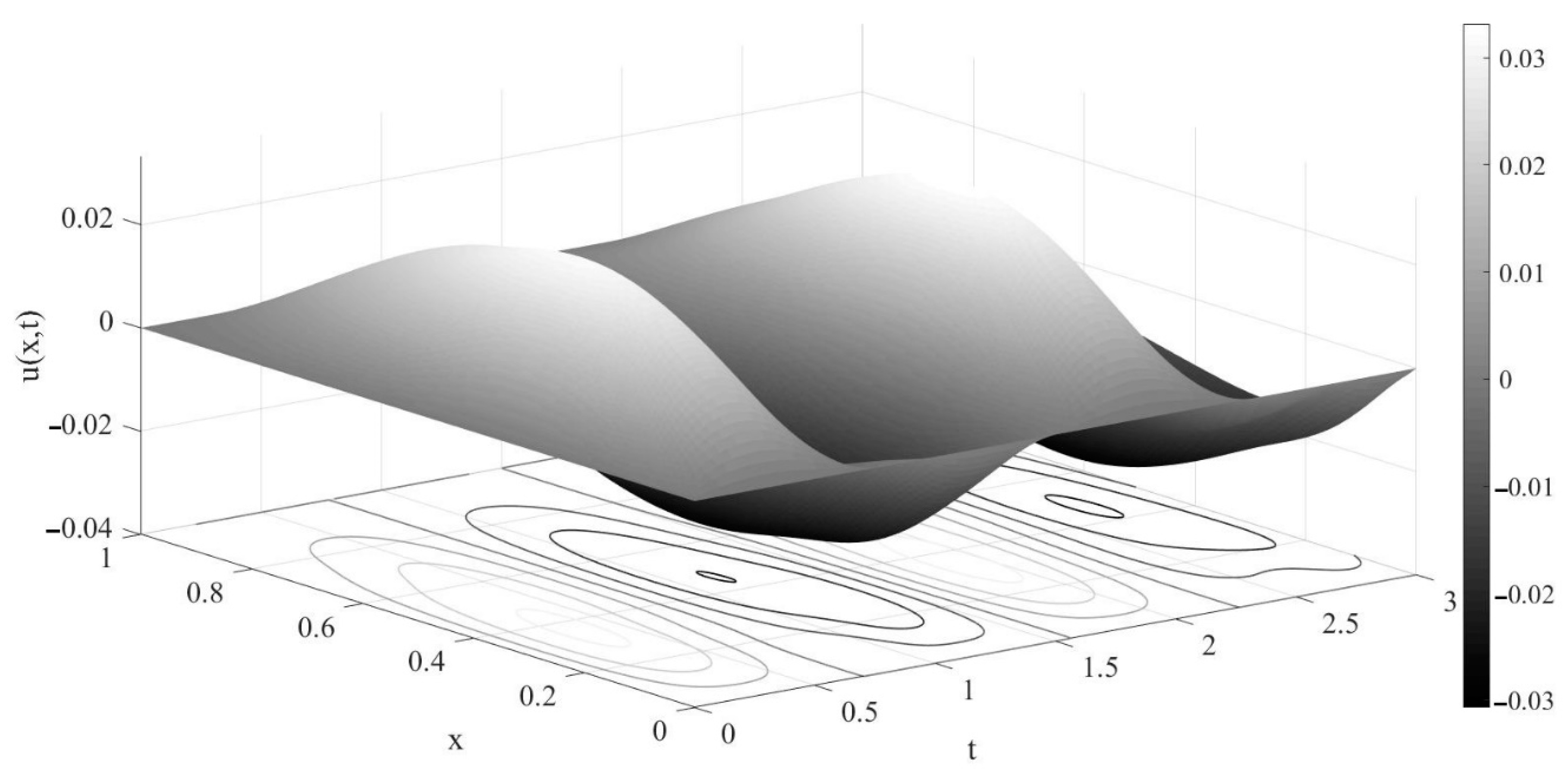
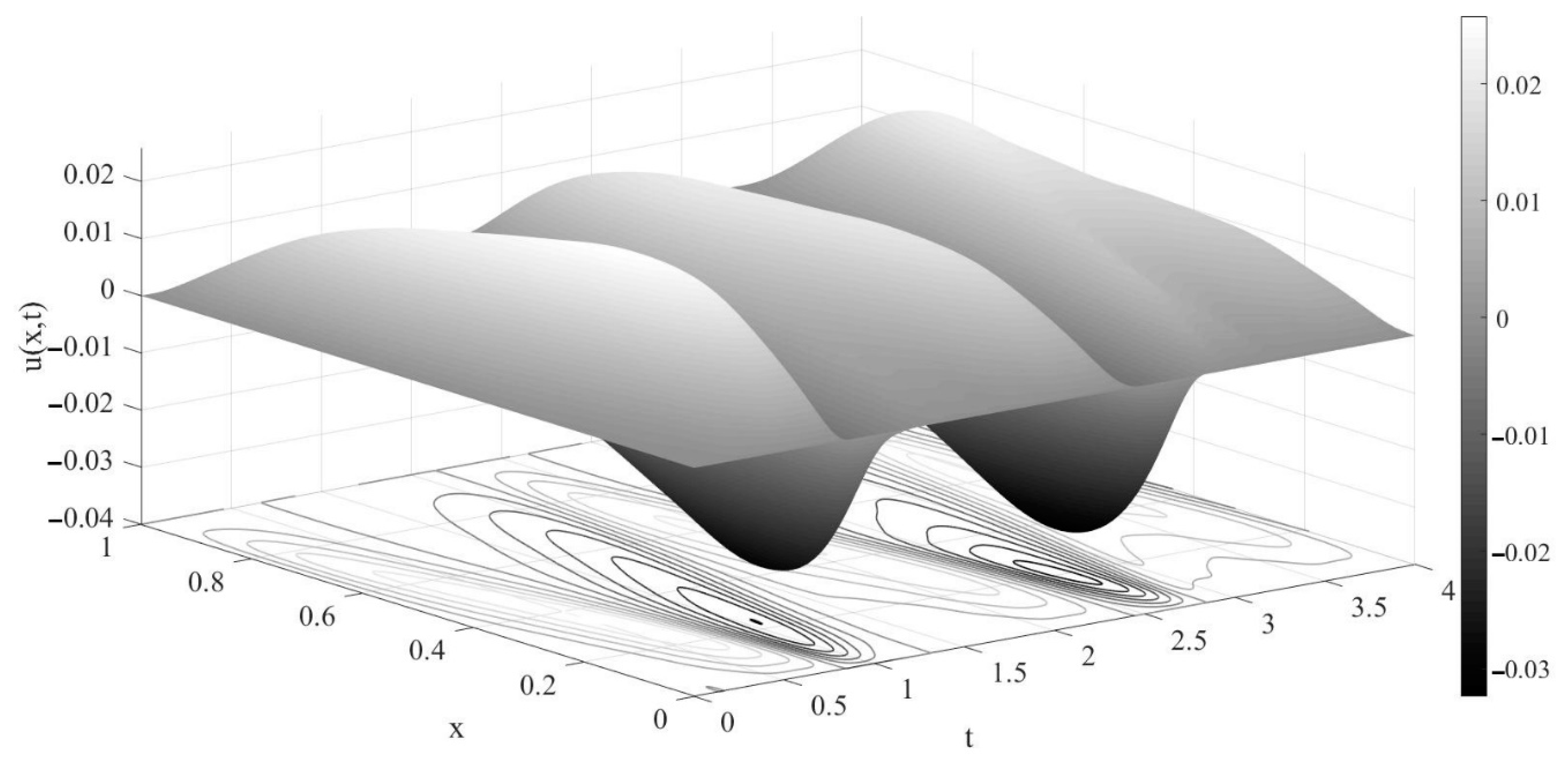
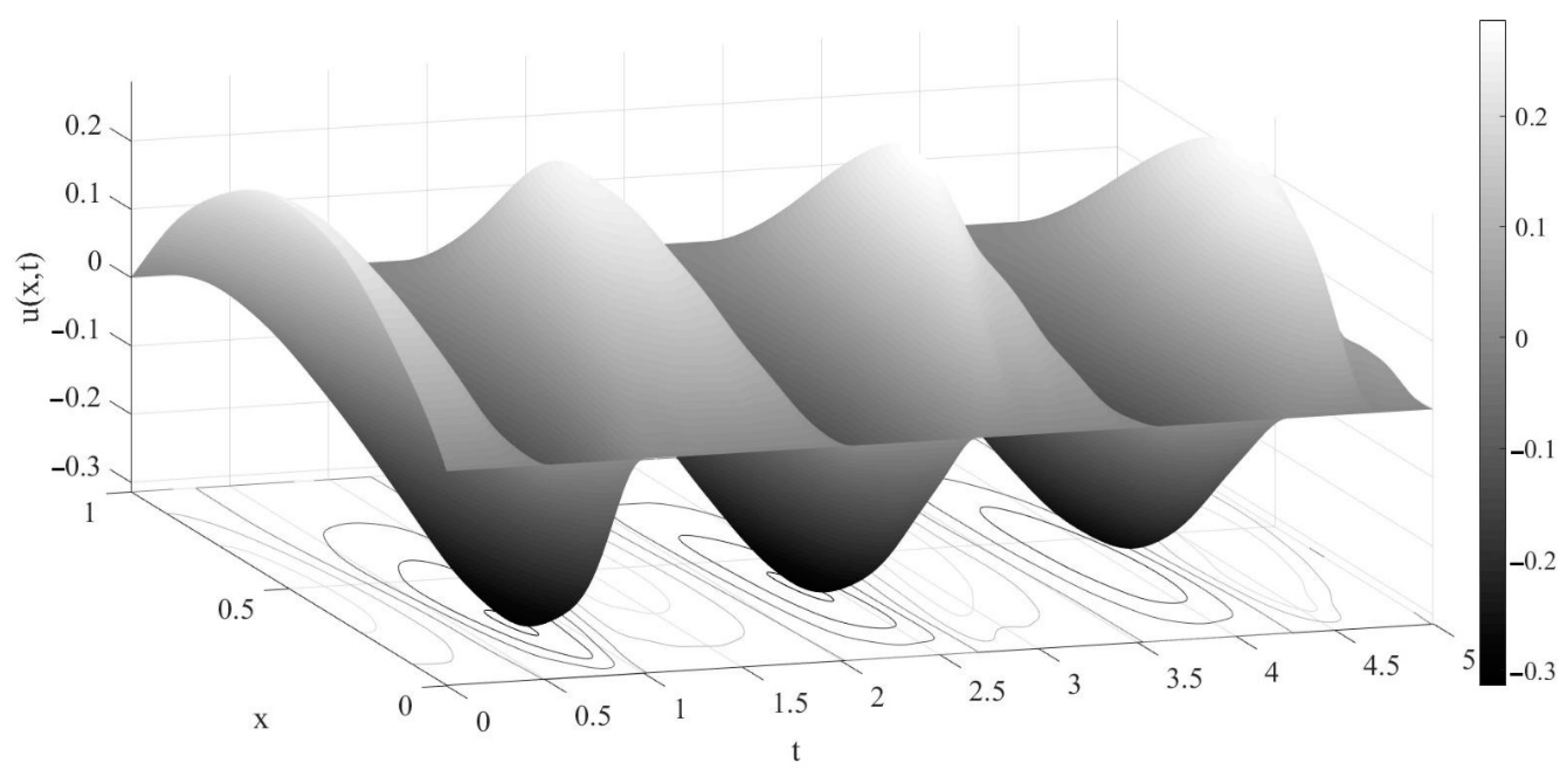
- Four numerical examples of the application of the solution to problems (1)–(4) to modeling changes in the deformation-strength characteristics of polymer concrete (dian and dichloroanhydride-1,1-dichloro-2,2-diethylene) under the influence of the gravity force are considered.
- -
- The rate of decrease in terms (14) corresponding to the considered examples is obtained:where
- -
- In the considered-above examples, we have established that the seventh (last) term contributes to the sum from 0.5% to 6%.
Funding
Acknowledgments
Conflicts of Interest
References
- Handbook of Fractional Calculus with Applications; Tenreiro, J.A., De Gruyter, M., Eds.; GmbH: Berlin, Germany; Boston, MA, USA, 2019; Volume 1–8. [Google Scholar]
- Herrmann, R. Fractional Calculus: An Introduction for Physicists, 2nd ed.; World Scientific: Singapore, 2014. [Google Scholar]
- Sandev, T.; Tomovshi, Z. Fractional Equations and Models: Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Zaslavsky, G.M. Chaos, fractional kinetics, and anomalous transport. Phys. Rep. 2002, 371, 461–580. [Google Scholar] [CrossRef]
- Magin, R.L. Fractional Calculus in Bioengineering; Begell House: New York, NY, USA; Danbury, CT, USA, 2006. [Google Scholar]
- Yuste, S.B.; Lindenberg, K. Subdiffusion-limited reactions. Chem. Phys. 2002, 284, 169–180. [Google Scholar] [CrossRef]
- Sabatelli, L.; Keating, S.; Dudley, J.; Richmond, P. Waiting time distributions in financial markets. Eur. Phys. J. B 2002, 27, 273–275. [Google Scholar] [CrossRef]
- Song, L.; Wang, W. Solution of the fractional Black-Scholes option pricing model by finite difference method. Abstr. Appl. Anal. 2013, 45, 1–16. [Google Scholar] [CrossRef]
- Aleroev, T.S.; Aleroeva, H.T.; Huang, J.F.; Nie, N.M.; Tang, Y.F.; Zhang, S.Y. Features of seepage of a liquid to a chink in the cracked deformable layer. Int. J. Model. Simul. Sci. Comput. 2010, 1, 333–347. [Google Scholar] [CrossRef]
- Jiang, X.; Yu, X.M. Analysis of fractional anomalous diffusion caused by an instantaneous point source in disordered fractal media. Int. J. Non-Lin. Mech. 2006, 41, 156–165. [Google Scholar]
- Chirkii, A.A.; Matichin, I.I. On linear conflict-controlled processes with fractional derivatives. Tr. Inst. Mat. Mekh. UrO RAN 2011, 17, 256–270. [Google Scholar]
- Ingman, D.; Suzdalnitsky, J. Control of damping oscillations by fractional differential operator with time-dependent order. Comput. Methods Appl. Mech. Eng. 2004, 193, 5585–5595. [Google Scholar] [CrossRef]
- Koh, G.K.; Kelly, J. Application of fractional derivatives to seismic analysis of base-isolated models. Earthq. Eng. Struct. Dyn. 1990, 19, 229–241. [Google Scholar] [CrossRef]
- Draganescu, G.E.; Cofan, N.; Rujan, D.L. Nonlinear vibrations of a nano-sized sensor with fractional damping. J. Optoelectron. Adv. Mater. 2005, 7, 877–884. [Google Scholar]
- Fenlander, A. Modal synthesis when modeling damping by use of fractional derivatives. AIAA J. 1996, 34, 1051–1058. [Google Scholar] [CrossRef]
- Meilanov, R.P.; Yanpolov, M.S. Features of the phase trajectory of a fractal oscillator. Tech. Phys. Lett. 2002, 28, 30–32. [Google Scholar] [CrossRef]
- Aleroev, T. The analysis of the polymer concrete characteristics by fractional calculus. Phys. Conf. Ser. Modeling Methods Struct. Anal. 2019, 1425, 012112. [Google Scholar] [CrossRef]
- Aleroev, T.; Erokhin, S.; Kekharsaeva, E. Modeling of deformation-strength characteristics of polymer concrete using fractional calculus. IOP Mater. Sci. Eng. 2018, 365, 032004. [Google Scholar] [CrossRef]
- Aleroev, T.S.; Kekharsaeva, E. Boundary Value Problems for Differential Equations with Fractional Derivatives. Integral Transform. Spec. Funct. 2017, 28, 900–908. [Google Scholar] [CrossRef]
- Aleroev, T.; Aleroeva, H. Problems of Sturm-Liouville type for differential equations with fractional derivatives. In Fractional Differential Equations; Kochubei, A., Luchko, Y., Eds.; De Gruyter: Berlin, Germany; Boston, MA, USA, 2019; pp. 21–46. [Google Scholar]
- Aleroev, T.S.; Kirane, M.; Tang, Y.F. Boundary-value problems for differential equations of fractional order. J. Math Sci. 2013, 10, 158–175. [Google Scholar] [CrossRef]
- Samarskiy, A.A.; Tikhonov, A.N. Equations of Mathematical Physics: Textbook, 6th ed.; Publishing house of Moscow State University: Moscow, Russia, 1999; pp. 82–96. [Google Scholar]
- Aleroev, T.; Kirianova, L. Presence of Basic Oscillatory Properties in the Bagley-Torvik Model. In IPICSE-2018 MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; Volume 251, p. 04022. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| λ1 | λ2 | λ3 | λ4 | λ5 | λ6 | λ7 |
|---|---|---|---|---|---|---|
| −16.51 | −59.49 | −125.13 | −213.33 | −323.27 | −455.09 | −607.31 |
| 0.01046 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 0 | −0.00213 | 0 | 0 | 0 | 0 | 0 | |
| 0 | 0 | 0.00076 | 0 | 0 | 0 | 0 | |
| 0 | 0 | 0 | −0.00035 | 0 | 0 | 0 | |
| 0 | 0 | 0 | 0 | 0.00018 | 0 | 0 | |
| 0 | 0 | 0 | 0 | 0 | −0.00011 | 0 | |
| 0 | 0 | 0 | 0 | 0 | 0 | 0.00007 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
|---|---|---|---|---|---|---|---|
| 0.20862 | 0.05574 | −0.01698 | 0.01228 | −0.00812 | 0.00586 | −0.00503 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
|---|---|---|---|---|---|---|---|
| 0.14149 | −0.13295 | 0.07009 | −0.04226 | 0.02925 | −0.02173 | 0.01719 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
|---|---|---|---|---|---|---|---|
| 0.06758 | 0.05946 | 0.01514 | 0.00500 | 0.00236 | 0.00120 | 0.00049 | |
| 1.81104 | −0.70356 | 0.38444 | −0.33961 | 0.23810 | −0.24218 | 0.18670 |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
|---|---|---|---|---|---|---|---|
| 0.14149 | −0.13295 | 0.07009 | −0.04226 | 0.02925 | −0.02173 | 0.01719 | |
| 0.57490 | −1.02545 | 0.78405 | −0.61730 | 0.52588 | −0.46347 | 0.42359 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kirianova, L. Modeling of Strength Characteristics of Polymer Concrete Via the Wave Equation with a Fractional Derivative. Mathematics 2020, 8, 1843. https://doi.org/10.3390/math8101843
Kirianova L. Modeling of Strength Characteristics of Polymer Concrete Via the Wave Equation with a Fractional Derivative. Mathematics. 2020; 8(10):1843. https://doi.org/10.3390/math8101843
Chicago/Turabian StyleKirianova, Ludmila. 2020. "Modeling of Strength Characteristics of Polymer Concrete Via the Wave Equation with a Fractional Derivative" Mathematics 8, no. 10: 1843. https://doi.org/10.3390/math8101843
APA StyleKirianova, L. (2020). Modeling of Strength Characteristics of Polymer Concrete Via the Wave Equation with a Fractional Derivative. Mathematics, 8(10), 1843. https://doi.org/10.3390/math8101843