Closed-Form Solutions and Conserved Vectors of a Generalized (3+1)-Dimensional Breaking Soliton Equation of Engineering and Nonlinear Science



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Solutions of the 3D-gBSe (2)
2.1. Lie Symmetry Analysis of Equation (2)
2.1.1. Lie Point Symmetries of Equation (2)
2.1.2. Symmetry Reduction of 3D-gBSe (2)
2.1.3. Solution of Equation (2) by Direct Integration of Equation (12)
2.2. Exact Solutions of Equation (2) by -Expansion Method
2.3. The Jacobi Elliptic Function Solutions of Equation (2)
2.4. Solution of Equation (2) Using the Power Series Method
3. Conserved Vectors of 3D-gBSe (2)
3.1. Multiplier Technique
3.2. Ibragimov Approach
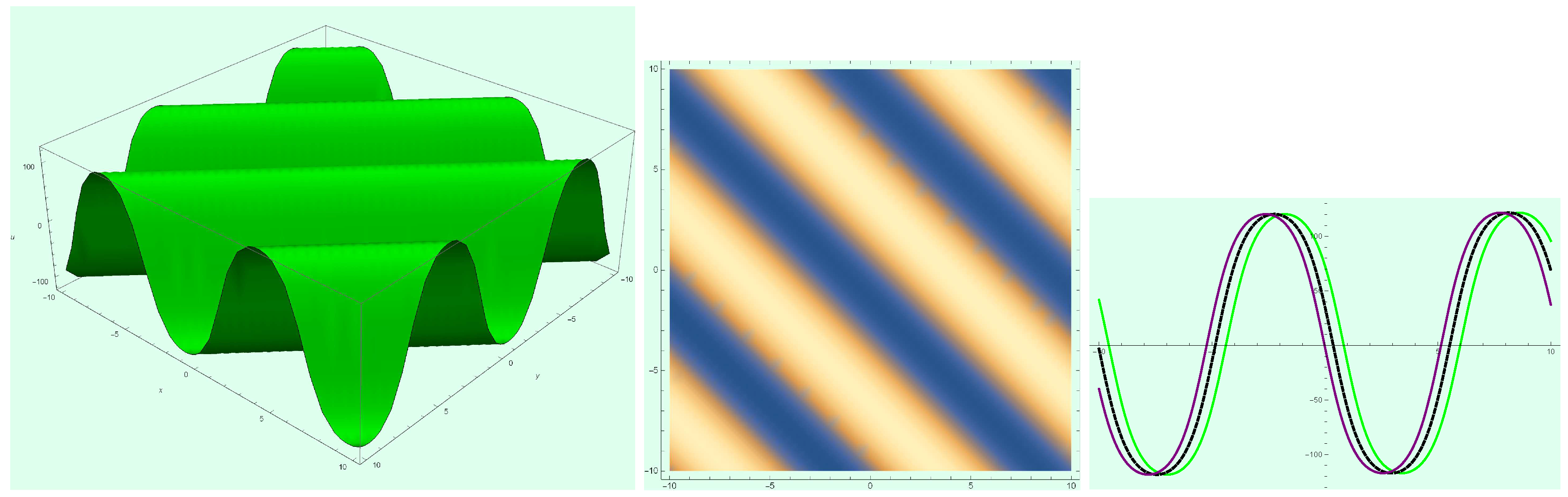
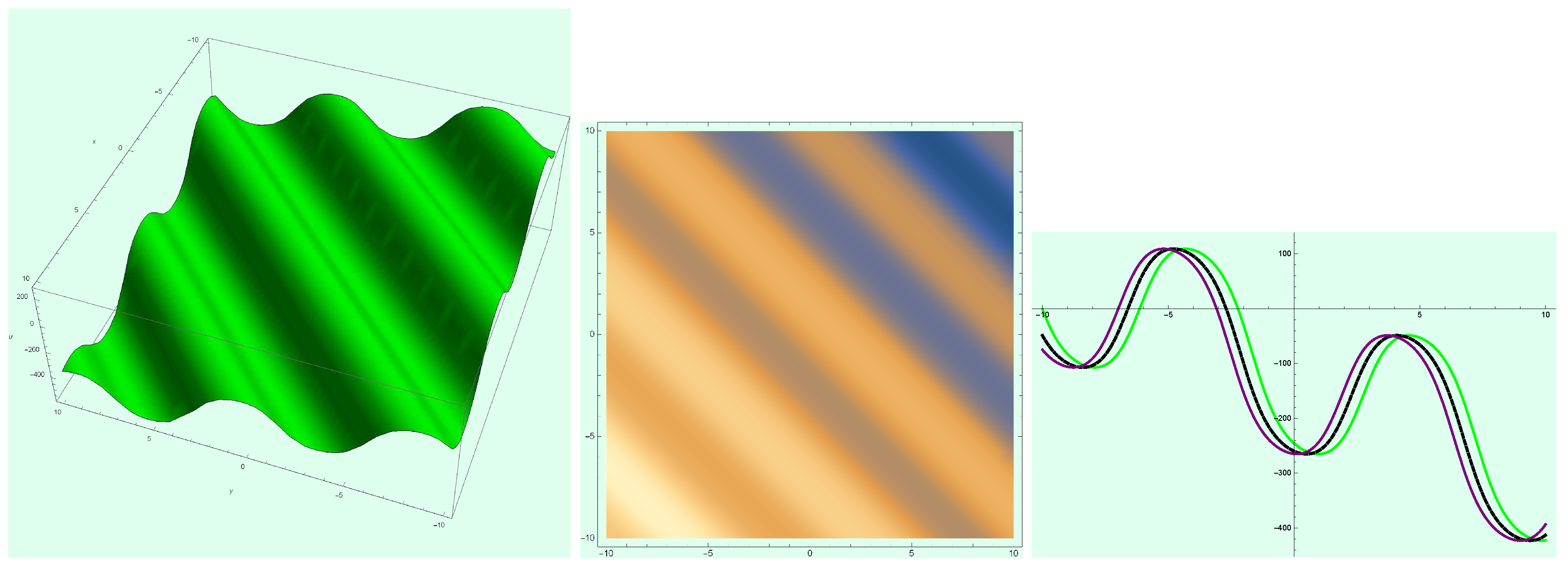
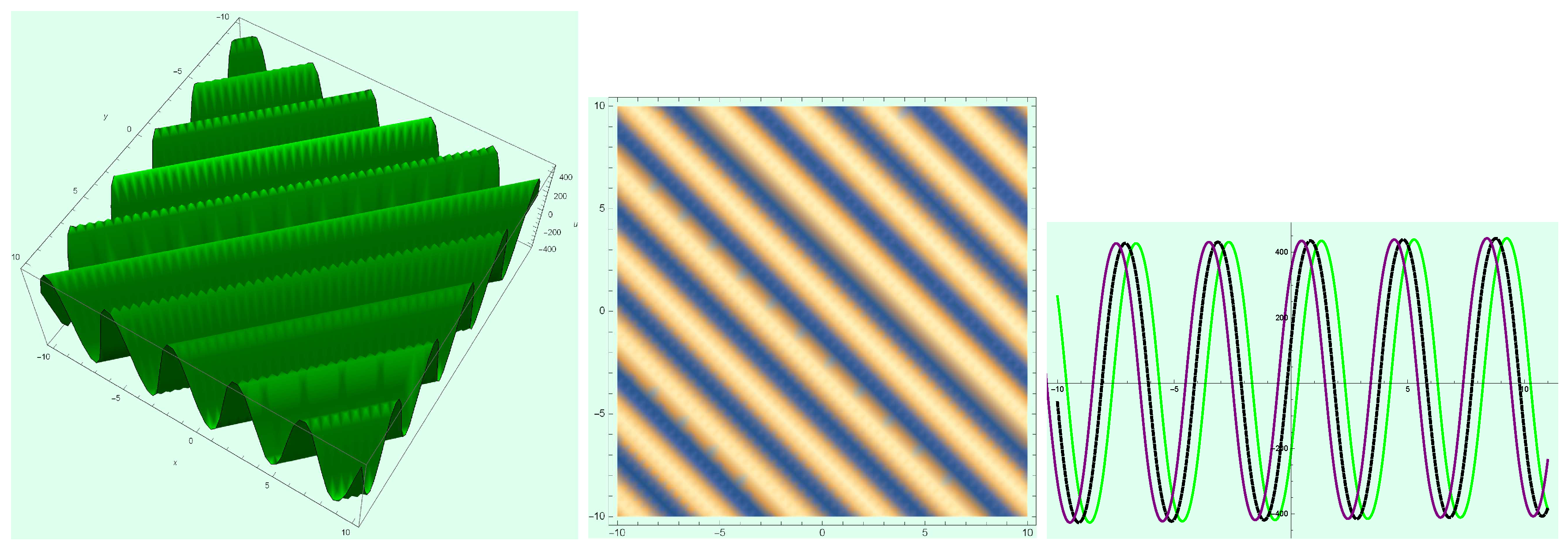
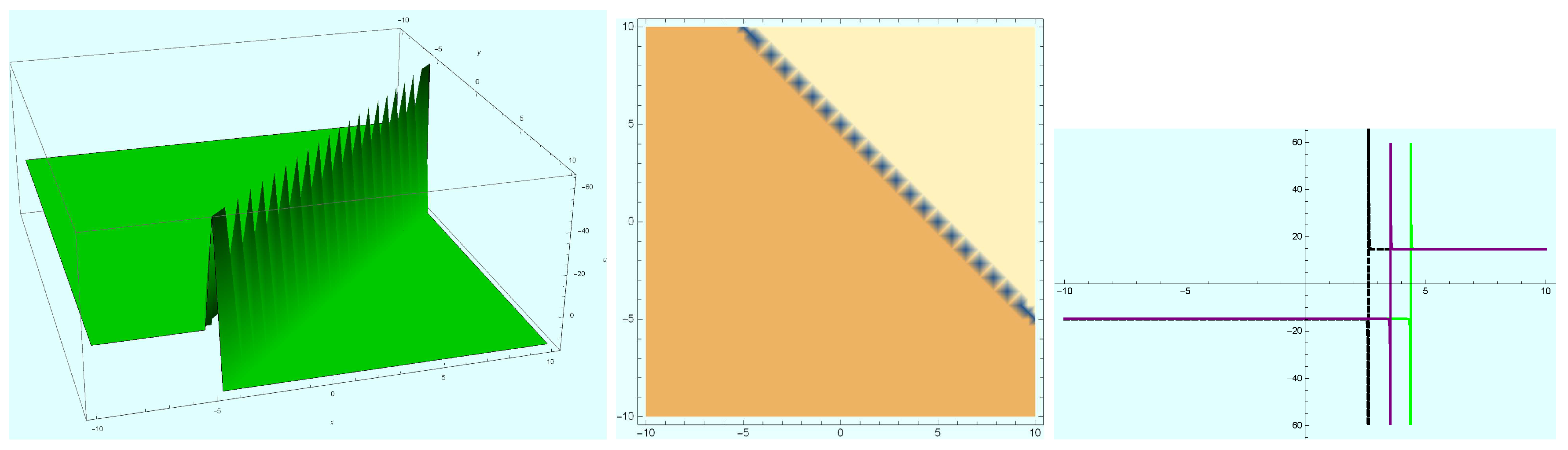
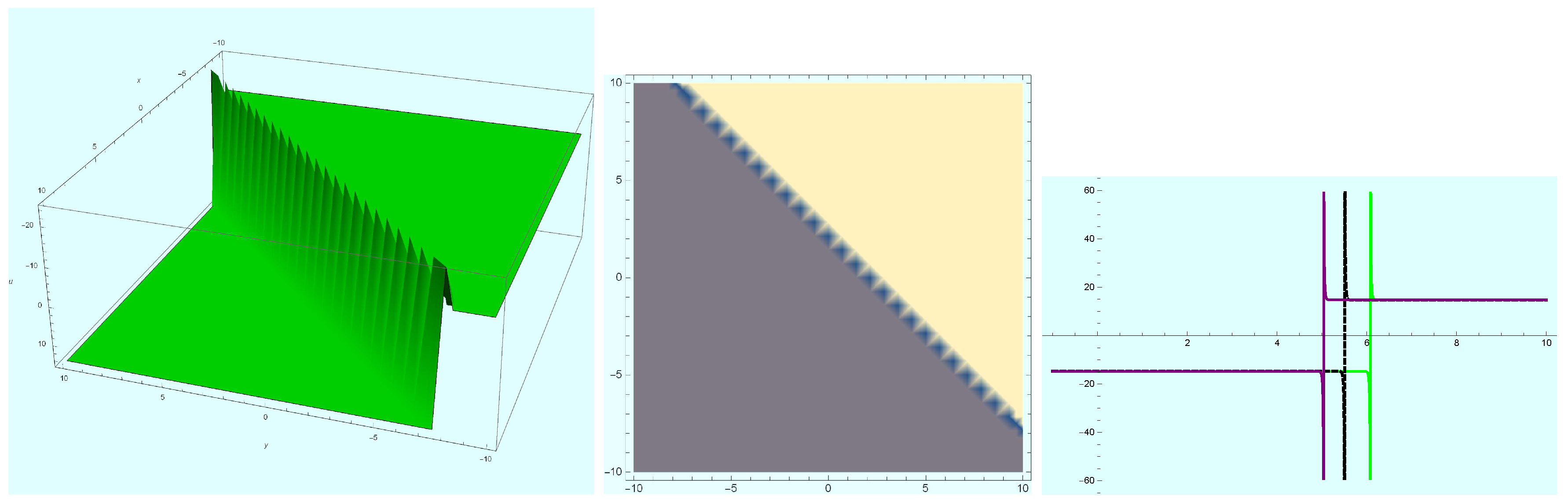
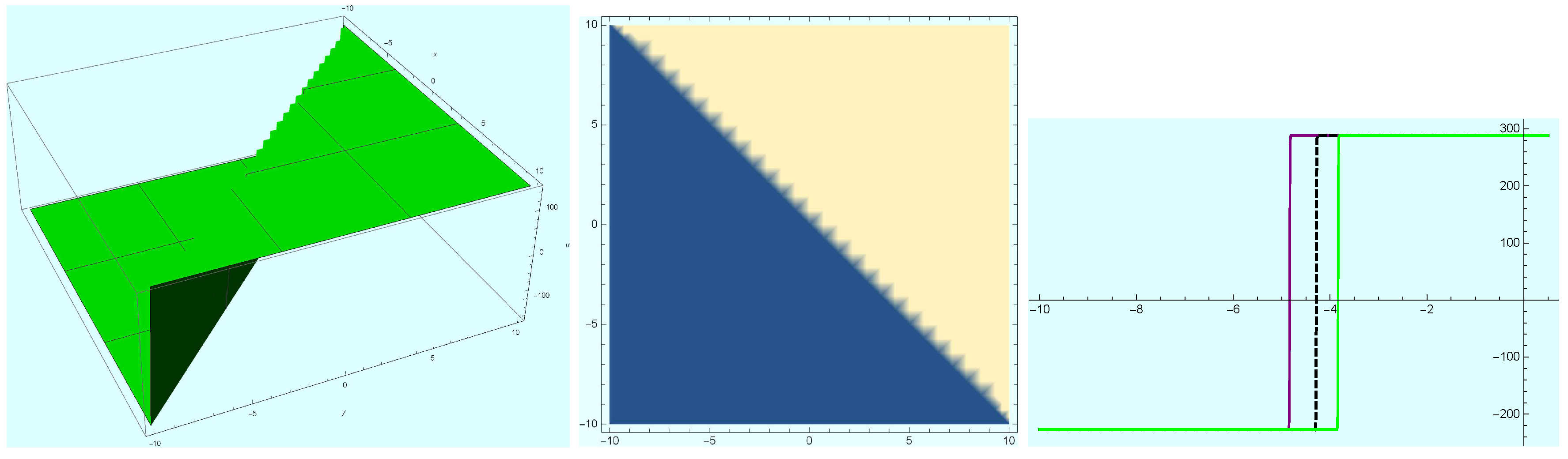
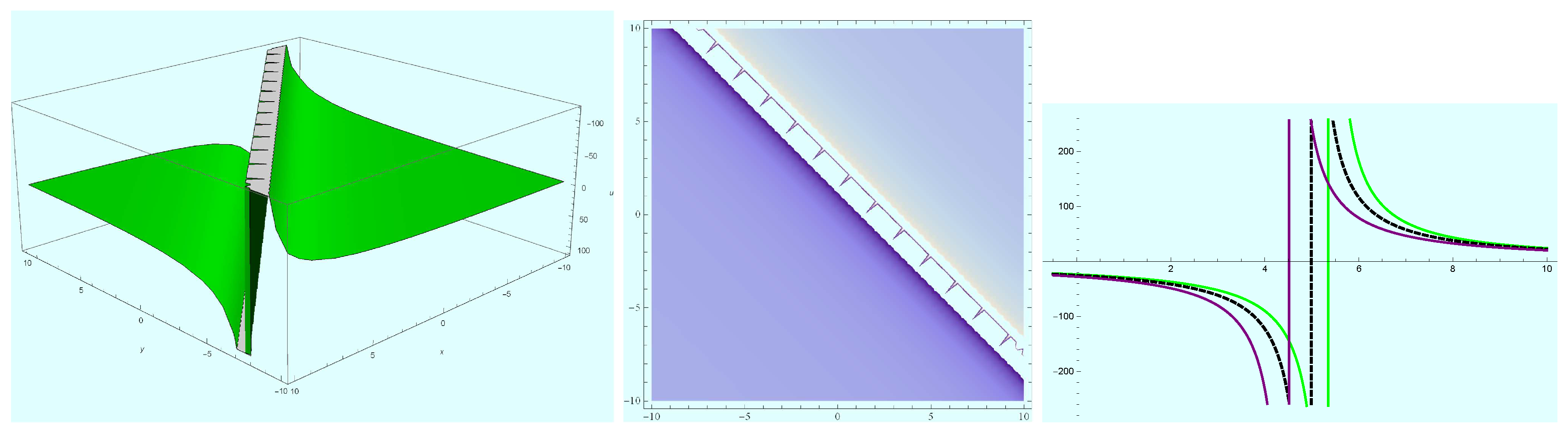
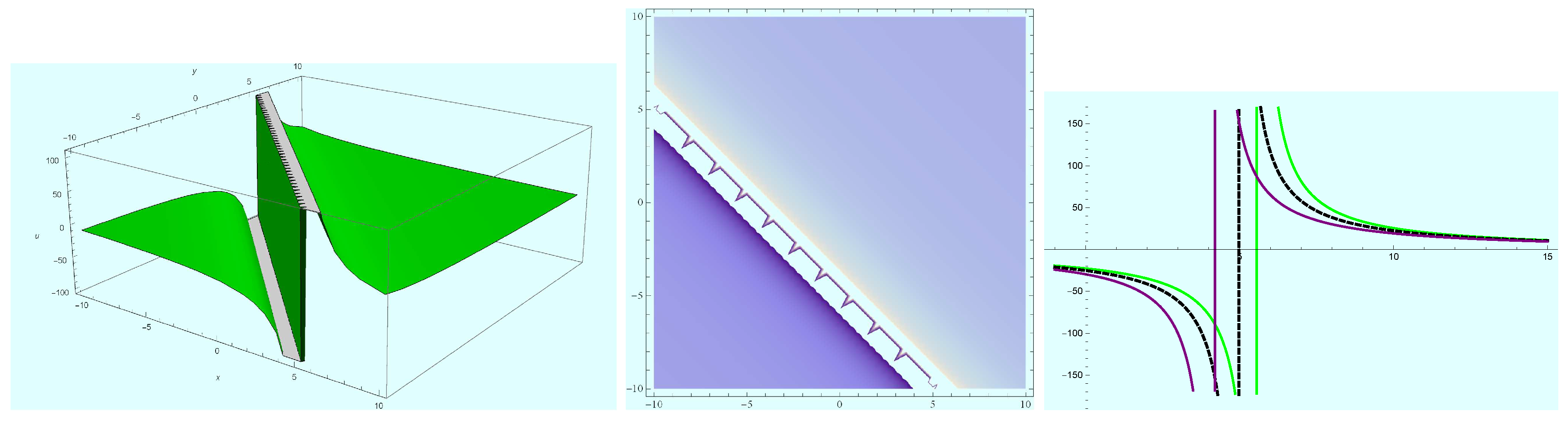
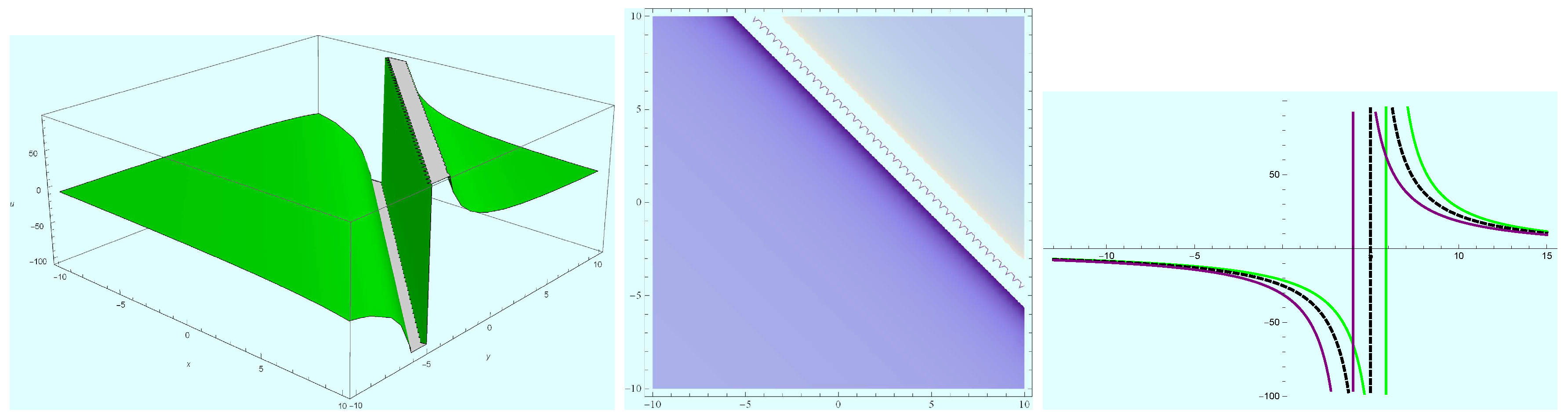
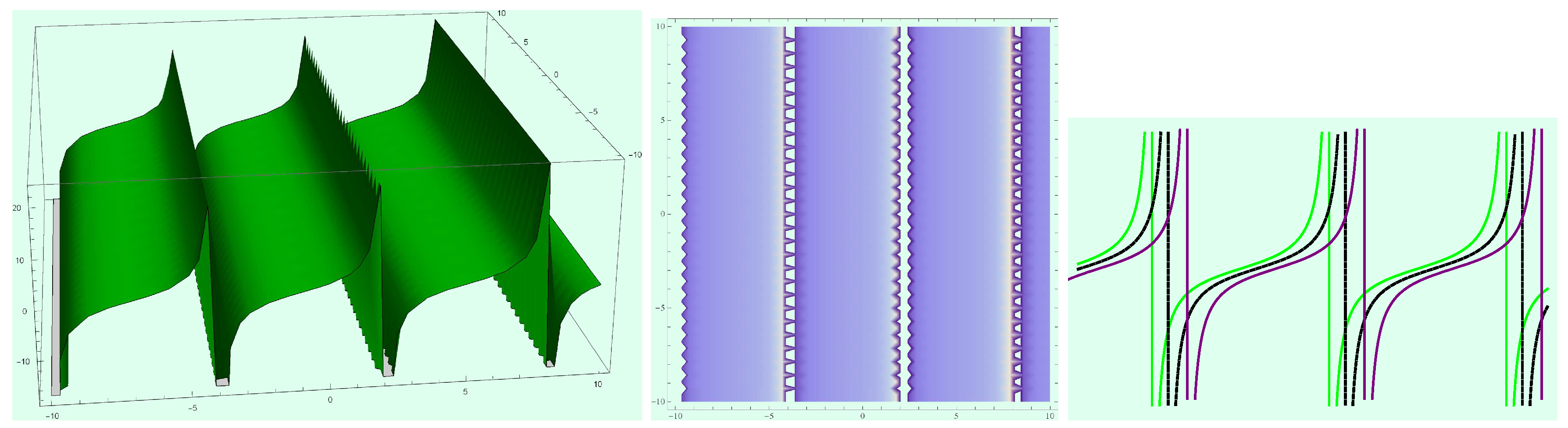
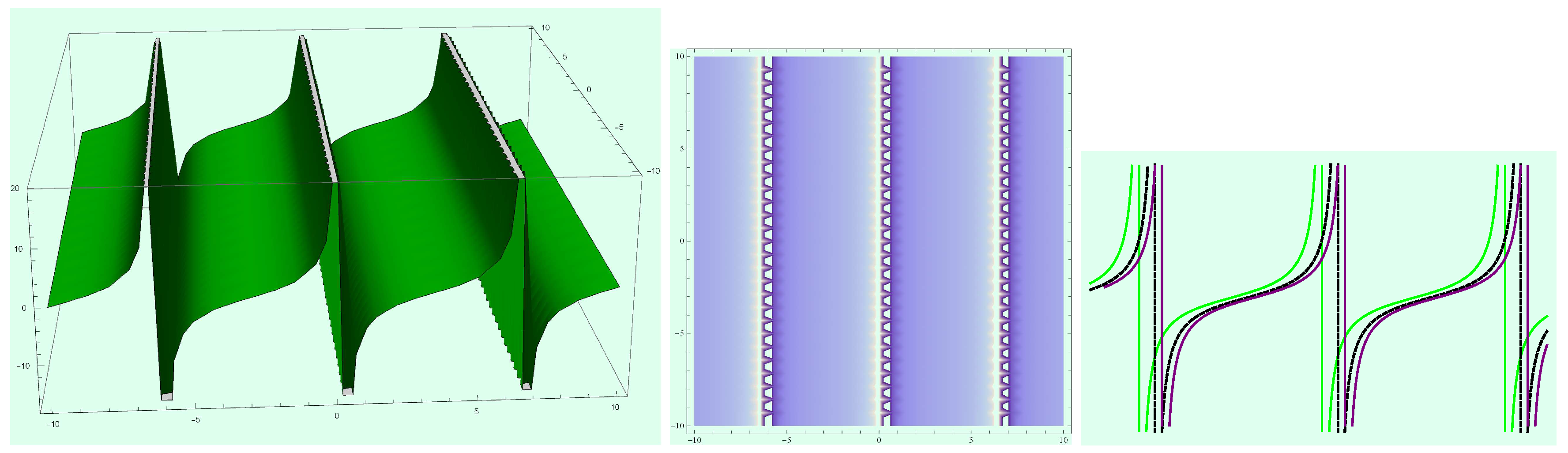
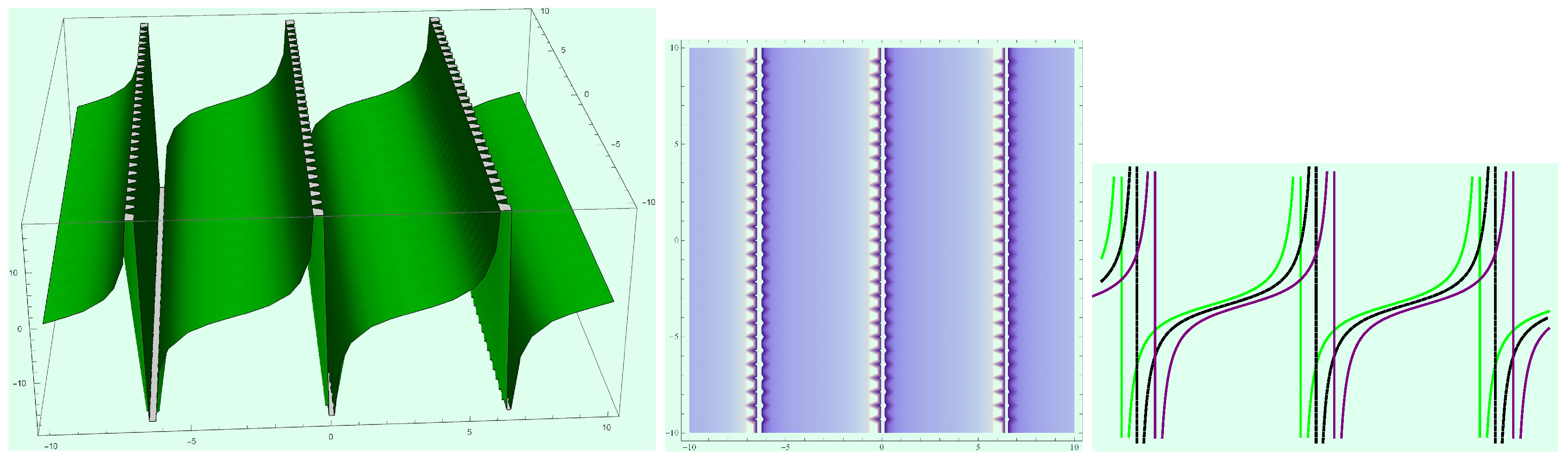
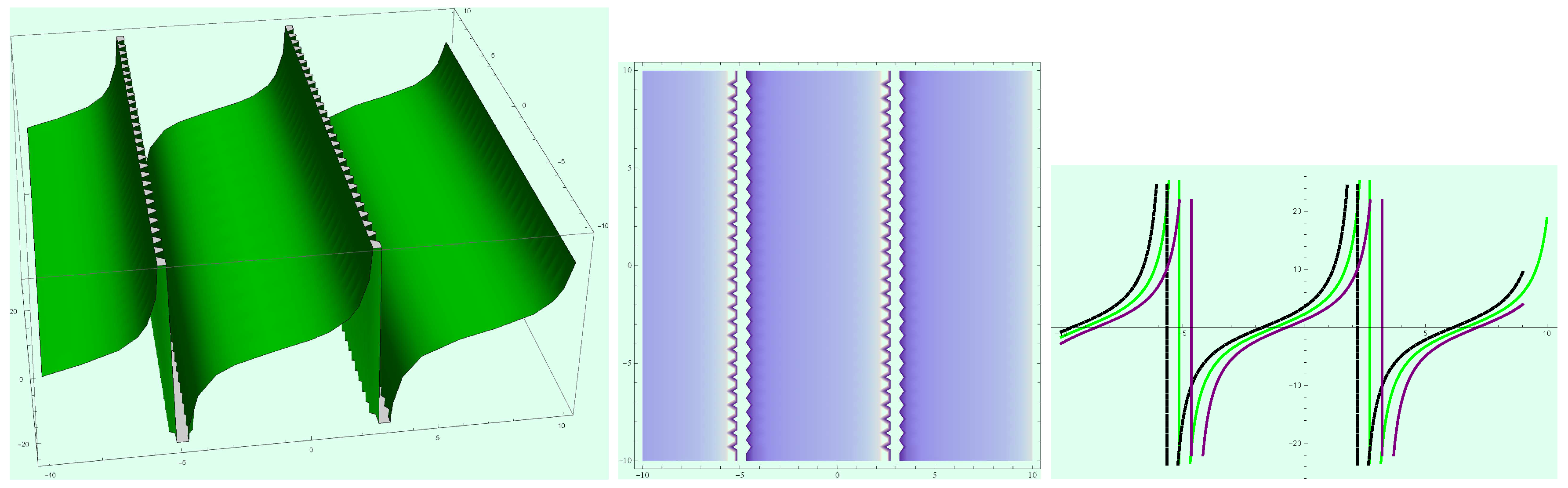
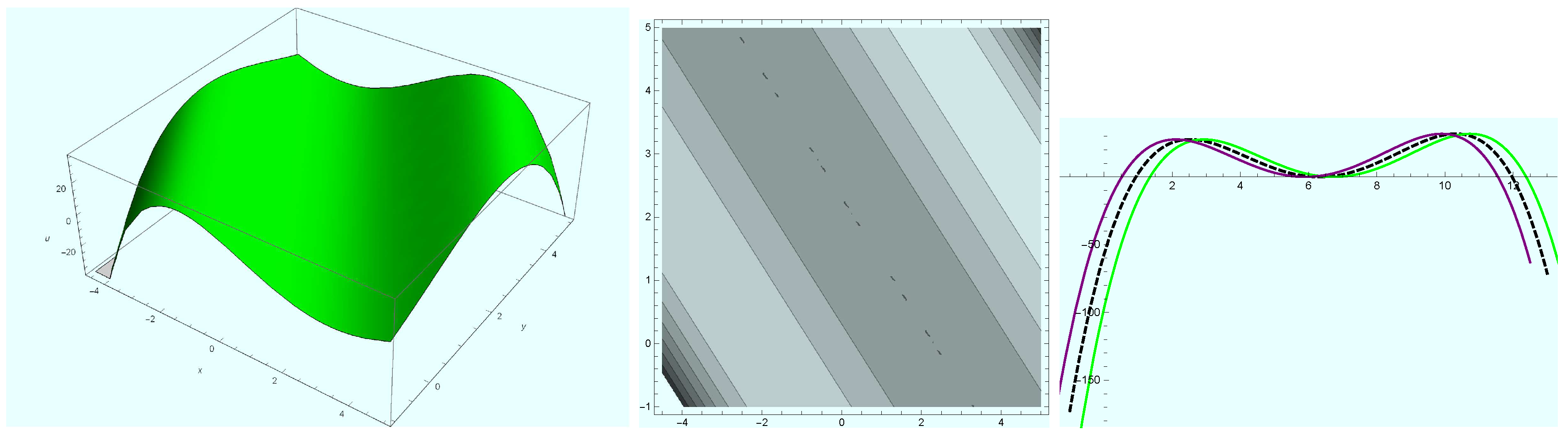
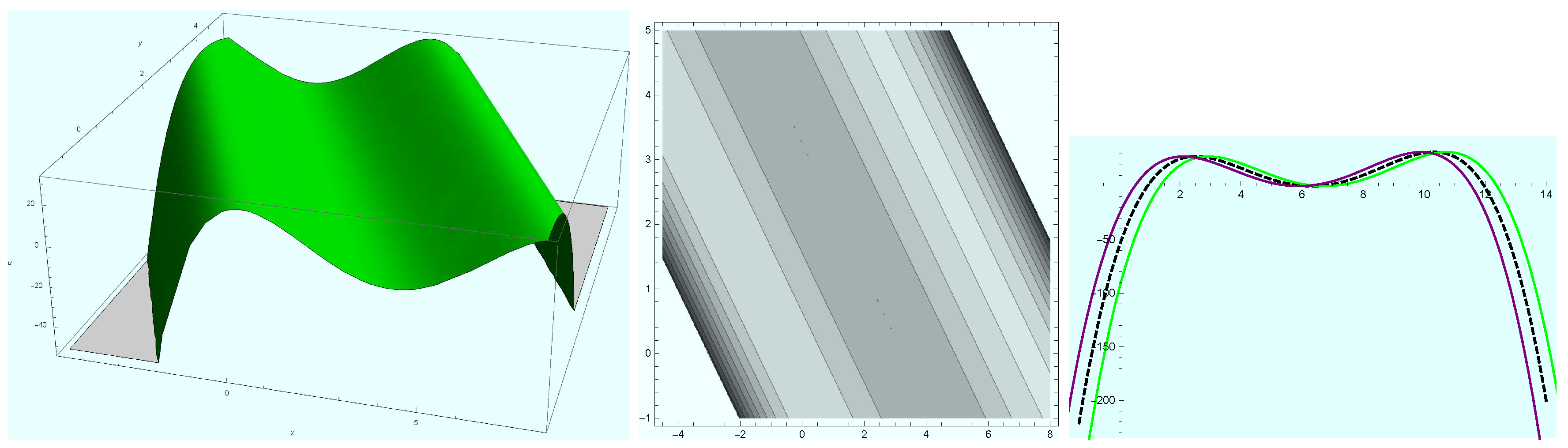
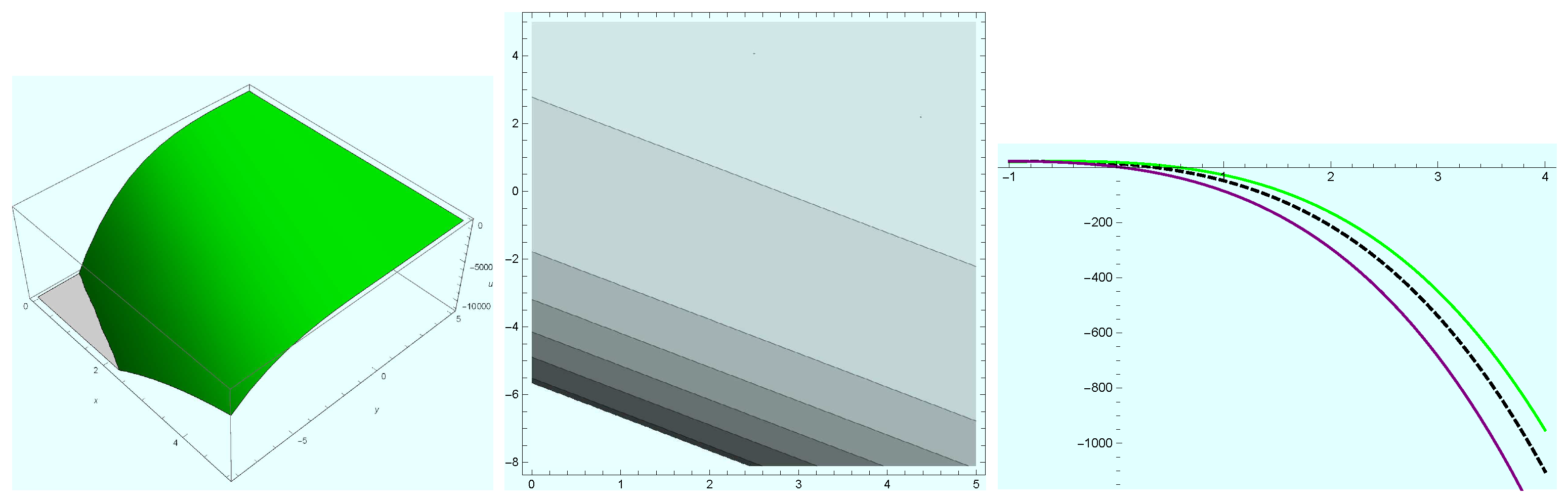
4. Discussion of the Graphical Representations of Solutions Obtained for 3D-gBSe (2)
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wazwaz, A.M. Multiple optical kink solutions for new Painlevé integrable (3+1)-dimensional sine-Gordon equations with constant and time-dependent coefficients. Optik 2020, in press. [Google Scholar]
- Wazwaz, A.M. Painlevé analysis for new (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equations with constant and time-dependent equations. Int. Numer. Methods Heat Fluid Flow 2019, 30, 996–1008. [Google Scholar] [CrossRef]
- Motsepa, T.; Khalique, C.M. Closed-form solutions and conserved vectors of the (3+1)-dimensional negative-order KdV equation. Adv. Math. Model. Appl. 2020, 5, 7–18. [Google Scholar]
- Wazwaz, A.M.; Xu, G.Q. Integrability aspects and localized wave solutions for a new (4+1)-dimensional Boiti-Leon-Manna-Pempinelli equation. Nonlinear Dyn. 2019, 98, 1379–1390. [Google Scholar]
- Gandarias, M.L.; Rosa, M.; Khalique, C.M. Conservation laws and travelling wave solutions for double dispersion equations in (1+1) and (2+1) dimensions. Symmetry 2020, 12, 950. [Google Scholar] [CrossRef]
- Mhlanga, I.E.; Khalique, C.M. A study of a generalized Benney-Luke equation with time-dependent coefficients. Nonlinear Dyn. 2017, 90, 1535–1544. [Google Scholar] [CrossRef]
- Motsepa, T.; Khalique, C.M.; Gandarias, M.L. Symmetry analysis and conservation laws of the Zoomeron equation. Symmetry 2017, 9, 27. [Google Scholar] [CrossRef]
- Zabusky, N.J.; Kruskal, M.D. Interaction of solitons in a collisionless plasma and recurrence of initial states. Phys. Rev. Lett. 1965, 15, 240–243. [Google Scholar] [CrossRef]
- Ablowitz, M.J.; Clarkson, P.A. Solitons, Nonlinear Evolution Equations and Inverse Scattering; Cambridge University Press: Cambridge, UK, 1991. [Google Scholar]
- Weiss, J.; Tabor, M.; Carnevale, G. The Painleve property and a partial differential equations with an essential singularity. Phys. Lett. A 1985, 109, 205–208. [Google Scholar]
- Zheng, C.L.; Fang, J.P. New exact solutions and fractional patterns of generalized Broer-Kaup system via a mapping approach. Chaos Soliton Fract. 2006, 27, 1321–1327. [Google Scholar] [CrossRef]
- Wen, X.Y. Construction of new exact rational form non-travelling wave solutions to the (2+1)-dimensional generalized BroerKaup system. Appl. Math. Comput. 2010, 217, 1367–1375. [Google Scholar] [CrossRef]
- Gu, C.H. Soliton Theory and Its Application; Zhejiang Science and Technology Press: Hangzhou, China, 1990. [Google Scholar]
- Zeng, X.; Wang, D.S. A generalized extended rational expansion method and its application to (1+1)-dimensional dispersive long wave equation. Appl. Math. Comput. 2009, 212, 296–304. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, M.; Wang, Y. Periodic wave solutions to a coupled KdV equations with variable coefficients. Phys. Lett. A 2003, 308, 31–36. [Google Scholar] [CrossRef]
- Wazwaz, A.M. The tanh and sine-cosine method for compact and noncompact solutions of nonlinear Klein Gordon equation. Appl. Math. Comput. 2005, 167, 1179–1195. [Google Scholar] [CrossRef]
- Kudryashov, N.A.; Loguinova, N.B. Extended simplest equation method for nonlinear differential equations. Appl. Math. Comput. 2008, 205, 396–402. [Google Scholar] [CrossRef]
- Hirota, R. The Direct Method in Soliton Theory; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations, 2nd ed.; Springer: Berlin, Germany, 1993. [Google Scholar]
- Ibragimov, N.H. Elementary Lie Group Analysis and Ordinary Differential Equations; John Wiley & Sons: Chichester, NY, USA, 1999. [Google Scholar]
- Zhang, L.; Khalique, C.M. Classification and bifurcation of a class of second-order ODEs and its application to nonlinear PDEs. Discret. Contin. Dyn. Syst. Ser. S 2018, 11, 777–790. [Google Scholar] [CrossRef]
- Wang, M.; Li, X.; Zhang, J. The (G′/G)—expansion method and travelling wave solutions for linear evolution equations in mathematical physics. Phys. Lett. A 2005, 24, 1257–1268. [Google Scholar]
- Matveev, V.B.; Salle, M.A. Darboux Transformations and Solitons; Springer: New York, NY, USA, 1991. [Google Scholar]
- Chen, Y.; Yan, Z. New exact solutions of (2+1)-dimensional Gardner equation via the new sine-Gordon equation expansion method. Chaos Solitons Fractals 2005, 26, 399–406. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Simplest equation method to look for exact solutions of nonlinear differential equations. Chaos Solitons Fractals 2005, 24, 1217–1231. [Google Scholar] [CrossRef]
- Chargui, Y.; Trabelsi, A.; Chetouani, L. Exact solution of the (1+1)-dimensional Dirac equation with vector and scalar linear potentials in the presence of a minimal length. Phys. Lett. A 2010, 374, 531–534. [Google Scholar]
- Khalique, C.M.; Adem, K.R. Exact solutions of the (2+1)-dimensional Zakharov-Kuznetsov modified equal width equation using Lie group analysis. Math. Comput. Model. 2011, 54, 184–189. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Multiple-soliton solutions for extended (3+1)-dimensional Jimbo-Miwa equations. Appl. Math. Lett. 2017, 64, 21–26. [Google Scholar] [CrossRef]
- Kaur, L.; Wazwaz, A.M. Dynamical analysis of lump solutions for (3+1)-dimensional generalized KP-Boussinesq equation and its dimensionally reduced equations. Phys. Scr. 2018, 93, 075203. [Google Scholar] [CrossRef]
- Ali, M.R.; Ma, W.X. New exact solutions of nonlinear (3+1)-dimensional Boiti-Leon-Manna-Pempinelli equation. Adv. Math. Phys. 2019, 2019, 7. [Google Scholar] [CrossRef]
- Verma, P.; Kaur, L. Extended exp-expansion method for generalized breaking soliton equation. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2020; Volume 2214. [Google Scholar]
- Yildirim, Y.; Yasar, E. A (2+1)-dimensional breaking soliton equation: Solutions and conservation laws. Chaos Solitons Fract. 2018, 107, 146–155. [Google Scholar] [CrossRef]
- Mei, J.; Zhang, H. New types of exact solutions for a breaking soliton equation. Chaos Solitons Fract. 2004, 20, 771–777. [Google Scholar] [CrossRef]
- Yan-Ze, P.; Krishnan, E.V. Two classes of new exact solutions to (2+1)-dimensional breaking soliton equation. Commun. Theor. Phys. 2005, 44, 807. [Google Scholar]
- Wazwaz, A.M. Breaking soliton equations and negative-order breaking soliton equations of typical and higher orders. Pramana 2016, 87, 68. [Google Scholar] [CrossRef]
- Wazwaz, A.M. The (2+1) and (3+1)-dimensional CBS equations: Multiple soliton solutions and multiple singular soliton solutions. Z. Naturforsch A 2010, 65, 173–181. [Google Scholar] [CrossRef]
- Darvishi, M.T.; Najafi, M.; Najafi, M. New exact solutions for the (3+1)-dimensional breaking soliton equation. Int. J. Math. 2010, 6, 134–137. [Google Scholar]
- Al-Amr, M.O. Exact solutions of the generalized (2+1)-dimensional nonlinear evolution equations via the modified simple equation method. Comput. Math. Appl. 2015, 69, 390–397. [Google Scholar] [CrossRef]
- Liu, X.Z.; Yu, J.; Lou, Z.M. Residual symmetry, CRE integrability and interaction solutions of the (3+1)-dimensional breaking soliton equation. Phys. Scr. 2018, 93, 085201. [Google Scholar] [CrossRef]
- Bluman, G.W.; Cheviakov, A.F.; Anco, S.C. Applications of Symmetry Methods to Partial Differential Equations; Springer: New York, NY, USA, 2010. [Google Scholar]
- Leveque, R.J. Numerical Methods for Conservation Laws, 2nd ed.; Birkhäuser-Verlag: Basel, Switzerland, 1992. [Google Scholar]
- Sarlet, W. Comment on conservation laws of higher order nonlinear PDEs and the variational conservation laws in the class with mixed derivatives. J. Phys. A Math. Theor. 2010, 43, 458001. [Google Scholar] [CrossRef]
- Ibragimov, N.H. Integrating factors, adjoint equations and Lagrangians. J. Math. Anal. Appl. 2006, 318, 742–757. [Google Scholar] [CrossRef]
- Ibragimov, N.H. A new conservation theorem. J. Math. Anal. Appl. 2007, 333, 311–328. [Google Scholar] [CrossRef]
- Motsepa, T.; Abudiab, M.; Khalique, C.M. A study of an extended generalized (2+1)-dimensional Jaulent-Miodek equation. Int. J. Nonlin. Sci. Num. 2018, 19, 391–395. [Google Scholar] [CrossRef]
- Abramowitz, M.; Stegun, I. Handbook of Mathematical Functions; Dover: New York, NY, USA, 1972. [Google Scholar]
- Kudryashov, N.A. Analytical Theory of Nonlinear Differential Equations; Institute of Computer Investigations: Moskow-Igevsk, Russia, 2004. [Google Scholar]
- Gradshteyn, I.S.; Ryzhik, I.M. Table of Integrals, Series and Products, 7th ed.; Academic Press: New York, NY, USA, 2007. [Google Scholar]
- Wang, G.; Liu, X.; Zhang, Y. Symmetry reduction, exact solutions and conservation laws of a new fifth-order nonlinear integrable equation. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 2313–2320. [Google Scholar] [CrossRef]
- Liu, H.; Li, J. Lie symmetry analysis and exact solutions for the short pulse equation. Nonlinear Anal. 2009, 21, 26–33. [Google Scholar] [CrossRef]
- Liu, H.; Li, J.; Zhang, Q.X. Lie symmetry analysis and exact solutions for general Burger’s equation. J. Comput. Appl. Math. 2009, 228, 1–9. [Google Scholar] [CrossRef]
- Bruzón, M.S.; Gandarias, M.L. Travelling wave solutions of the K(m, n) equation with generalized evolution. Math. Meth. Appl. Sci. 2018, 41, 5851–5857. [Google Scholar] [CrossRef]
- Cheviakov, A.F. Computation of fluxes of conservation laws. J. Eng. Math. 2010, 66, 153–173. [Google Scholar] [CrossRef]
- Motsepa, T.; Khalique, C.M. Cnoidal and snoidal waves solutions and conservation laws of a generalized (2+1)-dimensional KdV equation. In Proceedings of the 14th Regional Conference on Mathematical Physics; World Scientific Publishing Co Pte Ltd.: Singapore, 2018; pp. 253–263. [Google Scholar]
- Khalique, C.M.; Moleleki, L.D. A (3+1)-dimensional generalized BKP-Boussinesq equation: Lie group approach. Results Phys. 2019, 13, 2211–3797. [Google Scholar] [CrossRef]
- Khalique, C.M.; Adeyemo, O.D. A study of (3+1)-dimensional generalized Korteweg-de Vries-Zakharov-Kuznetsov equation via Lie symmetry approach. Results Phys. 2020, 18, 103197. [Google Scholar] [CrossRef]


















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masood Khalique, C.; Davies Adeyemo, O. Closed-Form Solutions and Conserved Vectors of a Generalized (3+1)-Dimensional Breaking Soliton Equation of Engineering and Nonlinear Science. Mathematics 2020, 8, 1692. https://doi.org/10.3390/math8101692
Masood Khalique C, Davies Adeyemo O. Closed-Form Solutions and Conserved Vectors of a Generalized (3+1)-Dimensional Breaking Soliton Equation of Engineering and Nonlinear Science. Mathematics. 2020; 8(10):1692. https://doi.org/10.3390/math8101692
Chicago/Turabian StyleMasood Khalique, Chaudry, and Oke Davies Adeyemo. 2020. "Closed-Form Solutions and Conserved Vectors of a Generalized (3+1)-Dimensional Breaking Soliton Equation of Engineering and Nonlinear Science" Mathematics 8, no. 10: 1692. https://doi.org/10.3390/math8101692
APA StyleMasood Khalique, C., & Davies Adeyemo, O. (2020). Closed-Form Solutions and Conserved Vectors of a Generalized (3+1)-Dimensional Breaking Soliton Equation of Engineering and Nonlinear Science. Mathematics, 8(10), 1692. https://doi.org/10.3390/math8101692