Exponential Stability Results on Random and Fixed Time Impulsive Differential Systems with Infinite Delay



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
- (i)
- W is continuous differentiable almost every where function.
- (ii)
- is locally Lipschitzian with respect to y and .
- (i)
- moment weakly exponentially stable, assume is a constant (convergence rate), if for any , there exists such that implies .
- (ii)
- moment exponentially stable, assume is a constant (convergence rate), if for any , there exists such that implies .
3. Main Results
- (i)
- (ii)
- For any , if , then , where for any ;
- (iii)
- For all , with ,
- (iv)
- (v)
- The inequality holds.Then, (1) is moment weakly exponentially stable.
- 1.
- If and the impulses arrival rate γ does not have any restrictions, then system (1) is the moment weakly exponentially stable.
- 2.
- If and the impulses arrival rate (no impulse arrival), then system (1) is moment weakly exponentially stable.
- 3.
- If and the impulses arrival rate , then system (1) is moment weakly exponentially stable.
- (i)
- (ii)
- For any , if , then ;
- (iii)
- For all , with ,
- (iv)
- (i)
- (ii)
- For any , if , then , where for any .
- (iii)
- For all , with ,
- (iv)
- (v)
- The inequality holds.Then, (1) is moment weakly exponentially stable.
- (i)
- (ii)
- For any , if , then .
- (iii)
- For all , with .
- (iv)
- Then, (1) is moment exponentially stable.
- (i)
- (ii)
- For any , if , then .
- (iii)
- For all , with
- (iv)
- where .Then, moment is weakly exponentially stable.
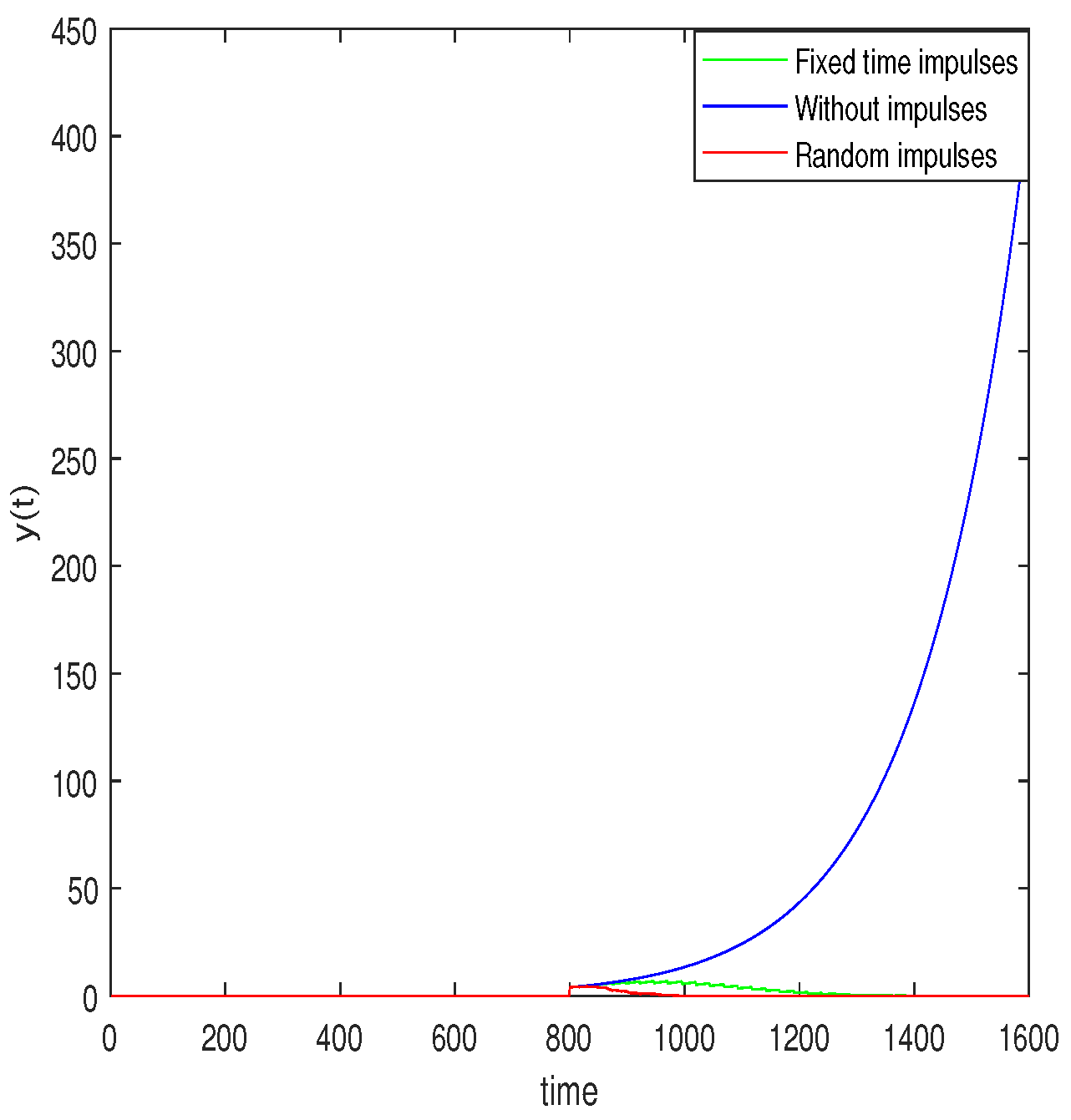
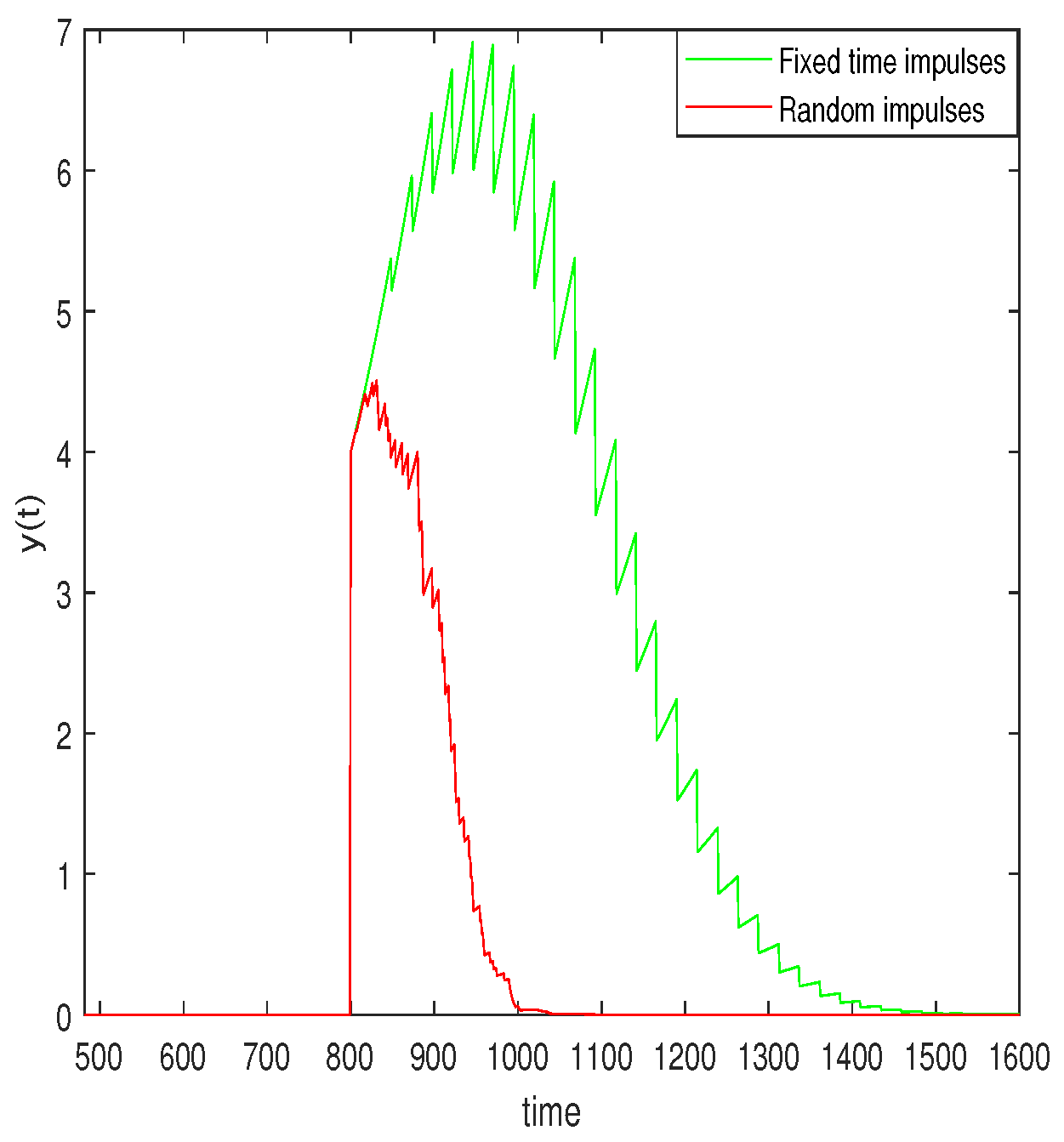
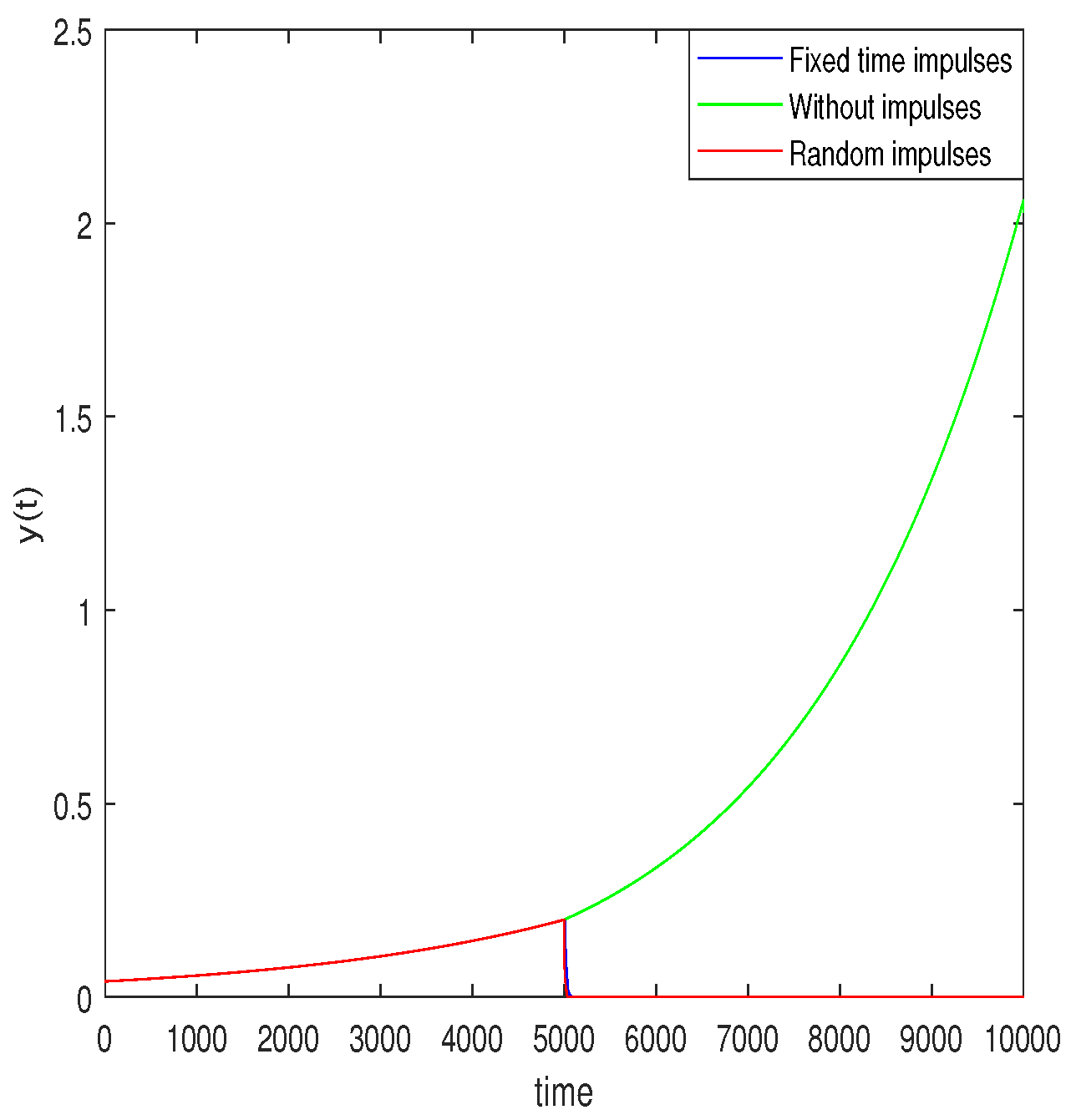
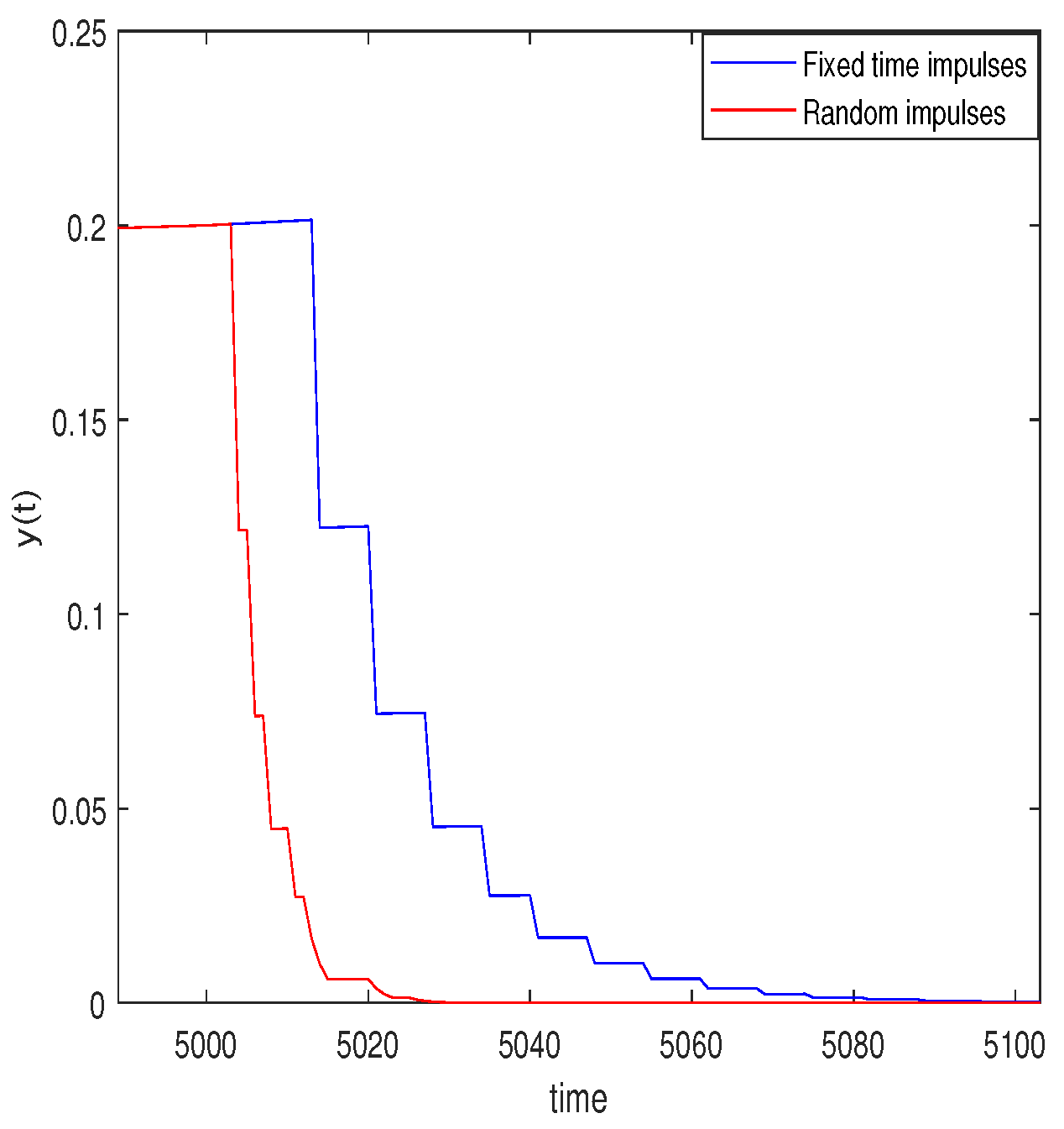
4. Example
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lakshmikantham, V.; Simeonov, P.S. Theory of Impulsive Differential Equations; World Scientific: Singapore, 1989; Volume 6. [Google Scholar]
- Samoilenko, A.M.; Perestyuk, N. Impulsive Differential Equations; World Scientific: Singapore, 1995. [Google Scholar]
- Liu, B.; Liu, X.; Teo, K.L.; Wang, Q. Razumikhin-type theorems on exponential stability of impulsive delay systems. Ima J. Appl. Math. 2006, 71, 47–61. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Q. The method of lyapunov functionals and exponential stability of impulsive systems with time delay. Nonlinear Anal. Theory Methods Appl. 2007, 66, 1465–1484. [Google Scholar] [CrossRef]
- Yang, D.; Shen, J.; Zhou, Z.; Li, X. State-dependent switching control of delayed switched systems with stable and unstable modes. Math. Methods Appl. Sci. 2018, 41, 6968–6983. [Google Scholar] [CrossRef]
- Yang, X.; Li, X.; Xi, Q.; Duan, P. Review of stability and stabilization for impulsive delayed systems. Math. Biosci. Eng. 2018, 15, 1495–1515. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Han, X.; Li, X. Design of hybrid controller for synchronization control of chen chaotic system. J. Nonlinear Sci. Apl. 2017, 10, 3320–3327. [Google Scholar] [CrossRef][Green Version]
- Li, X.; Shen, J.; Rakkiyappan, R. Persistent impulsive effects on stability of functional differential equations with finite or infinite delay. Appl. Math. Comput. 2018, 329, 14–22. [Google Scholar] [CrossRef]
- Yang, T. Impulsive control. IEEE Trans. Autom. Control. 1999, 44, 1081–1083. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, D. Stability analysis and design of impulsive control systems with time delay. IEEE Trans. Autom. Control. 2007, 52, 1448–1454. [Google Scholar] [CrossRef]
- Kayar, Z.; Zafer, A. Lyapunov-type inequalities for nonlinear impulsive systems with applications. Elec. J. Qual. Theory Differ. Equ. 2016, 27, 1–13. [Google Scholar] [CrossRef]
- Li, X.; Ding, Y. Razumikhin-type theorems for time-delay systems with persistent impulses. Syst. Control. Lett. 2017, 107, 22–27. [Google Scholar] [CrossRef]
- Li, X.; Wu, J. Stability of nonlinear differential systems with state-dependent delayed impulses. Automatica 2016, 64, 63–69. [Google Scholar] [CrossRef]
- Li, X.; Yang, X.; Huang, T. Persistence of delayed cooperative models: Impulsive control method. Appl. Math. Comput. 2019, 342, 130–146. [Google Scholar] [CrossRef]
- Liu, X.; Ballinger, G. Uniform asymptotic stability of impulsive delay differential equations. Comput. Math. Appl. 2001, 41, 903–915. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Song, S. Effect of delayed impulses on input-to-state stability of nonlinear systems. Automatica 2017, 76, 378–382. [Google Scholar]
- Anguraj, A.; Vinodkumar, A. Existence, uniqueness and stability results of random impulsive semilinear differential systems. Nonlinear Anal. Hybrid Syst. 2010, 4, 475–483. [Google Scholar] [CrossRef]
- Wu, S. Exponential stability of random impulsive differential systems. Acta Math. Sci. 2005, 25, 789–798. [Google Scholar]
- Agarwal, R.; Hristova, S.; O’Regan, D. Exponential stability for differential equations with random impulses at random times. Adv. Differ. Equ. 2013, 1, 372. [Google Scholar] [CrossRef]
- Agarwal, R.; Hristova, S.; Kopanov, P.; O’Regan, D. Impulsive differential equations with gamma distributed moments of impulses and p-moment exponential stability. Acta Math. Sci. 2017, 37, 985–997. [Google Scholar] [CrossRef]
- Anguraj, A.; Vinodkumar, A.; Malar, K. Existence and stability results for random impulsive fractional pantograph equations. Filomat 2016, 30, 3839–3854. [Google Scholar] [CrossRef]
- Caraballo, T.; Cortes, J.; Navarro-Quiles, A. Applying the random variable transformation method to solve a class of random linear differential equation with discrete delay. Appl. Math. Comput. 2019, 356, 198–218. [Google Scholar] [CrossRef]
- Gikhman, I.I.; Skorokhod, A.V. Stochastic differential equations. In The Theory of Stochastic Processes III; Springer: Berlin/Heidelberg, Germany, 2007; pp. 113–219. [Google Scholar]
- Gowrisankar, M.; Mohankumar, P.; Vinodkumar, A. Stability results of random impulsive semilinear differential equations. Acta Math. Sci. 2014, 34, 1055–1071. [Google Scholar] [CrossRef]
- Shaikhet, L. Lyapunov Functionals and Stability of Stochastic Functional Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Vinodkumar, A.; Anguraj, A. Existence of random impulsive abstract neutral non-autonomous differential inclusions with delays. Nonlinear Anal. Hybrid Syst. 2011, 5, 413–426. [Google Scholar] [CrossRef]
- Vinodkumar, A.; Malar, K.; Gowrisankar, M.; Mohankumar, P. Existence, uniqueness and stability of random impulsive fractional differential equations. Acta Math. Sci. 2016, 36, 428–442. [Google Scholar] [CrossRef]
- Vinodkumar, A.; Senthilkumar, T.; Li, X. Robust exponential stability results for uncertain infinite delay differential systems with random impulsive moments. Adv. Differ. Equ. 2018, 1, 39. [Google Scholar] [CrossRef]
- Wu, S.; Guo, X.; Zhou, Y. P-moment stability of functional differential equations with random impulses. Comput. Math. Appl. 2006, 52, 1683–1694. [Google Scholar] [CrossRef]




© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Vinodkumar, A.; Senthilkumar, T. Exponential Stability Results on Random and Fixed Time Impulsive Differential Systems with Infinite Delay. Mathematics 2019, 7, 843. https://doi.org/10.3390/math7090843
Li X, Vinodkumar A, Senthilkumar T. Exponential Stability Results on Random and Fixed Time Impulsive Differential Systems with Infinite Delay. Mathematics. 2019; 7(9):843. https://doi.org/10.3390/math7090843
Chicago/Turabian StyleLi, Xiaodi, A. Vinodkumar, and T. Senthilkumar. 2019. "Exponential Stability Results on Random and Fixed Time Impulsive Differential Systems with Infinite Delay" Mathematics 7, no. 9: 843. https://doi.org/10.3390/math7090843
APA StyleLi, X., Vinodkumar, A., & Senthilkumar, T. (2019). Exponential Stability Results on Random and Fixed Time Impulsive Differential Systems with Infinite Delay. Mathematics, 7(9), 843. https://doi.org/10.3390/math7090843