1. Introduction
A dynamical system can be formulated by any fixed rule describing the time-dependence of an evolving point with its position in the relevant state(phase)-space. It is then best described by a function whose domain and codomain respectively consist of time as an independent variable and state(phase)-space as a dependent variable. The independent variable
time can be measured in terms of integers, real or complex numbers. An example of continuous dynamical systems can be seen in differential equations, while other examples of discrete dynamical systems can be seen in difference equations. This analysis will be limited to a discrete dynamical system which is governed by a difference equation in the form of an iterative method: with
as a fixed point operator [
1]
Such an operator
can be found in root-finding problems of many fields of applied sciences and has been enhanced by many researchers [
2,
3,
4,
5,
6,
7,
8,
9] to find better iterative numerical solutions.
The convergence behavior of iterative sequence (
1) indeed implies the long-term behavior of discrete dynamical system (
1). Hence, taking initial guess
as an evolving point, we can trace the long-term behavior of the discrete dynamical system as a sequence of
k-fold compositions of
applied to an initial guess
:
where
is generally meromorphic. The lemma in Section 1.2.1 of [
10] suffices to deal with
that is a rational function.
Cordero et al. [
11] have recently introduced a family of optimal iterative root-finding methods for a system of nonlinear equations
in the following form:
where
is a complex-valued parameter;
has a zero
with
and is holomorphic [
12] in a neighborhood of
;
is a matrix function with
as an
complex matrix satisfying the following hypotheses (i)–(iii):
- (i)
with as the first derivative of H such that
- (ii)
with as the second derivative of H such that
- (iii)
with as the third derivative of H such that ,
where denotes the space of linear mappings from and .
Then, we have the following variant of Theorem 3 presented from Cordero et al. [
11]:
Theorem 1. Let and H be introduced in Equation (2) with and . Then, iterative numerical scheme (2) converges to the root α of F, starting from a given initial guess sufficiently close to α, with the following error equation:where and . Applications of the above theorem cover a number of existing studies introduced in [
11] and references cited therein. For
, by considering the one-point compactification of
, namely, the Riemann sphere
, Cordero et al. [
11] have pursued the complex dynamics on
for Jarratt-like uniparametric iterative map (
2), with
for periodic points via Möbius conjugacy [
13] map
applied to a quadratic polynomial
. Although they included an analysis of the
-parameter space, our primary aim of this paper is to pursue a somewhat advanced study of the
-parameter space where bifurcation behavior along the stability circle needs to be extensively analyzed.
The remaining part of this paper is devoted to the development of further properties in additional five sections. Described in
Section 2 are preliminary studies on long-term behavior of a dynamical system via conjugacy defined on
.
Section 3 fully discusses a linear stability theory based on the analysis of a small perturbation about the fixed point of the iterative map (
2) under the Möbius conjugacy and classifies the local bifurcations into three types according to the location of the spectral radius of the conjugated iterative map along the unit circle. In
Section 4, we describe some properties of the fixed and critical points related to the dynamics under the Möbius conjugacy map.
Section 5 investigates a long-term dynamical behavior of the conjugated iterative map. Parameter spaces along with dynamical planes are defined and extensively explored with a number of self-explanatory illustrative figures. In addition, we develop a theory on tracking down bifurcation points budding from another component [
14] in the parameter space from a viewpoint of plane geometry. Finally, in
Section 6, we draw an overall conclusion and briefly state the future work.
2. Preliminary Studies
For ease of discussion of two dynamical systems
F and
G, one needs to perceive the notion of conjugacy [
15,
16], follow Theorem 2.1 of [
16] describing the invariances of topological and diffeomorphic conjugacies, and remark on the preservation of the dynamical behavior between two
n-fold composite dynamical systems
and
under topological conjugacy with
for any integer
n.
The following lemma is a variant of the well-known
Banach fixed-point theorem or
contraction mapping principle [
17].
Lemma 1. Let and be analytic. Furthermore, let f have a fixed point with . Then, f has a unique fixed point ξ and the sequence converges to ξ, provided that any is given.
In Lemma 1, can be chosen as a critical point of f, due to the fact that implies . The result of Lemma 1 with yields the following corollary.
Corollary 1. Let ξ be the fixed point described in Lemma 1. Then, every critical orbit (which is an orbit of a critical point) of f tends to ξ.
Remark 1. Corollary 1 provides a background for the definition of the parameter space to be discussed in Section 5. In fact, an orbit of any point in a small neighborhood of the fixed point ξ tends to ξ according to Proposition 4.4 of [18], which constitutes a basis for the definition of the dynamical plane in Section 5. The following definition [
19,
20,
21] plays a role in describing the qualitative behavior of a dynamical system.
Definition 1. Let be in the domain of f. The orbit of is defined to be the sequence with as the k-fold composite map of f. Then, we say the following:
- (a)
has period k (or is a period-k point ) if , with all distinct . If , then is called a fixed point.
- (b)
If is a period-k point (or k-periodic point), then the orbit of is called a k-periodic orbit (or k-cycle).
- (c)
If is a point some iterate of which is periodic, i.e., if there exists an integer satisfying , then is called an eventually periodic (or a pre-periodic) point.
- (d)
If the the orbit of contains a subsequence converging to to a stable periodic point, then is called an asymptotically periodic point.
- (e)
If is not of types (a),(c),(d), then is called an aperiodic (or a non-periodic) point. The orbit of such is said to be “non-periodic, stochastic or chaotic”.
3. Linear Stability Theory and Local Bifurcations
Consider a discrete dynamical system
with
defined by
where
is a control parameter and
is given. Assuming
is a fixed point of
, we take a small perturbation about
by writing
where the initial perturbation
is arbitrary. For a given
, expanding Equation (
4) about
up to the first-order term in
yields:
with
as an
Jacobian matrix evaluated at
. As a consequence, we are ready to discuss the linear stability about the fixed point by considering
We transform Equation (
7) by means of an
nonsingular matrix
P to obtain
where
, and
is the Jordan canonical form [
22] of
S with
k Jordan blocks
. A typical
is given by an
upper triangular matrix with
’s as all diagonal entries and 1’s as all super-diagonal entries as shown below:
where
is an eigenvalue of
S. Without loss of generality, let
be chosen such that
, which is the spectral radius of
S. For simplicity, we denote
by
,
by
and
by
r. The limit behavior of the perturbation
will be best described by analyzing a subsystem
where
consists of the corresponding
r components of
related with
. Note that, by induction on
,
is given by
If
in Equation (
10), i.e., all eigenvalues of
S are simple, then, based on the component-wise expressions, we easily obtain the following lemma:
Lemma 2. - (i)
if and only if .
- (ii)
if and only if .
- (iii)
for some finite if and only if .
If
in Equation (
10), i.e., some eigenvalues of
S are multiple, and then we obtain:
Lemma 3. - (i)
if and only if .
- (ii)
if and only if .
Proof. (i) After close inspection of upper off-diagonal entries in Equation (
10), we find
for
if and only if
by applying L’Hospitals’s rule
j times. Hence, all upper off-diagonal entries vanish as
if and only if
. (ii) Similarly, we find
for
if and only if
. □
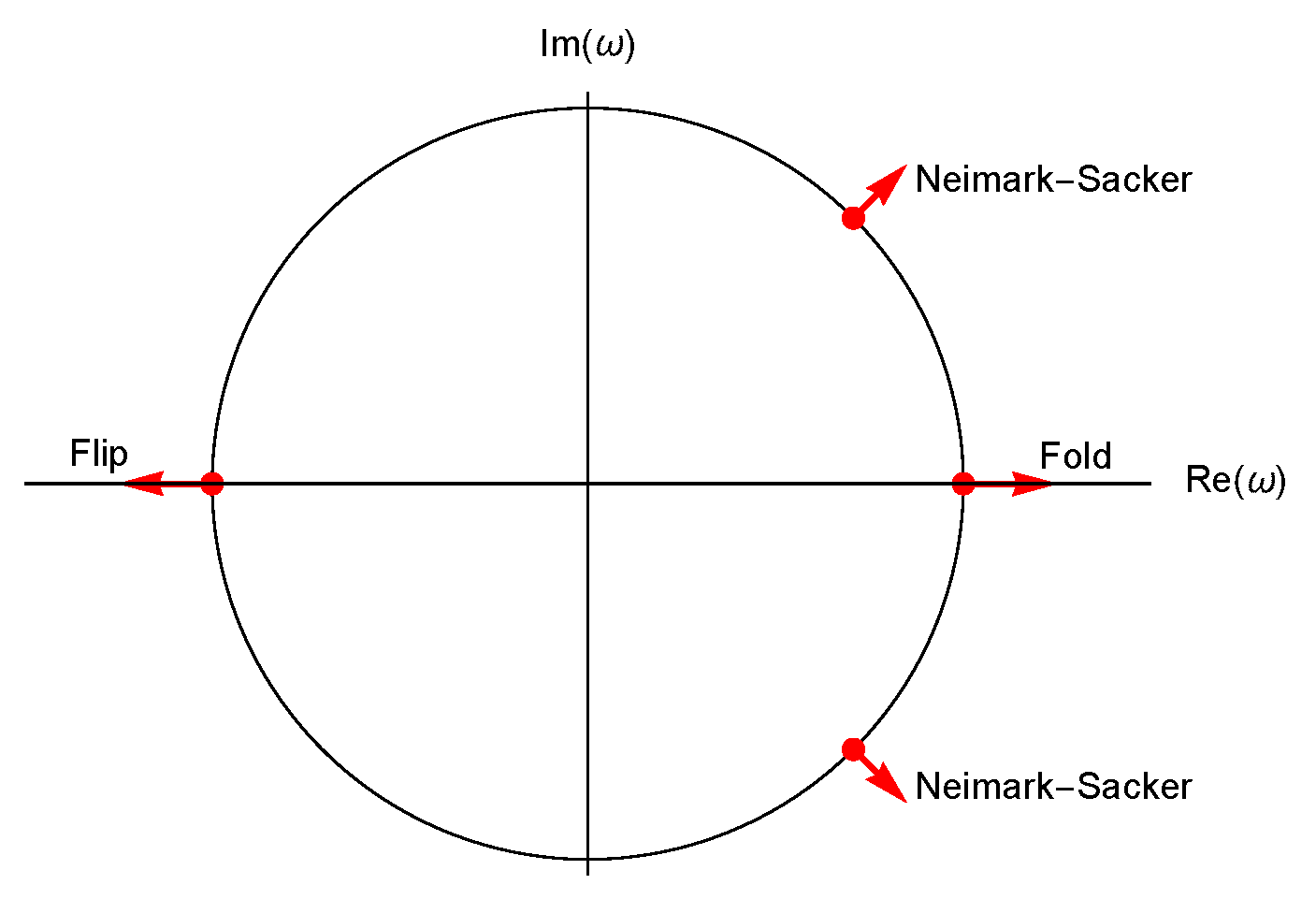
Remark 2. When all eigenvalues of S are simple, according to Lemma 2, the fixed point behavior or long-term orbit behavior of the iterative map is stable if and only if (modulus of all eigenvalues of ), and unstable if and only if (modulus of some eigenvalues of ) from a viewpoint of the linear stability. According to the Bolzano–Weierstrass Theorem [14], the result (iii) of Lemma 2 indicates that there exists a convergent subsequence of , which will induce k-periodic orbits of as well as its non-periodic bounded orbits, if and only if . Since
around the unit circle plays a significant role in stability analysis, we had better designate the unit circle as the
stability unit circle shown in
Figure 1 for further analysis.
Consequently, the geometrical properties in the parameter space when
would play key roles in analyzing the long-term orbit behavior of
. Such a long-term orbit behavior will often experience an abrupt qualitative change when an eigenvalue
(or Floquet multiplier [
23]) of
S with the maximum modulus crosses a certain location
of the stability unit circle. This kind of qualitative change in the behavior of a dynamical system is called a
bifurcation. We classify such bifurcations [
24] in the space of control parameters into three types according to the location of
along the stability unit circle as follows:
- (1)
The (cyclic) fold(saddle-node) bifurcation occurs when .
- (2)
The flip(period-doubling) bifurcation occurs when .
- (3)
The Neimark–Sacker(secondary Hopf) bifurcation occurs when , purely complex, with .
The location of the control parameter in the parameter space where a qualitative change in the behavior of a dynamical system occurs is called a bifurcation point. To locate such a bifurcation point, after solving the relation for in terms of exactly or numerically, we can trace the control parameter as varies along the stability unit circle. As a result, the bifurcation point in the parameter space can be given by based on the types of bifurcation mentioned above.
4. Fixed and Critical Points under the Möbius Conjugacy Map
For iterative map (
2) with
and
given by Equation (
3), we will discuss some properties of fixed and critical points under the Möbius conjugacy map, as
varies in the finite complex plane. To effectively treat a one-dimensional iterative map, we conveniently denote
for
.
Let
be defined by
in Equation (
2) and be conjugate to a map
J through a diffeomorphic Möbius conjugacy map
as introduced in
Section 1. For ease of analysis, we consider
as a prototype quadratic polynomial and find that the resulting
J will generally take the form dependent on
and
. Very favorably,
with
leads us to:
which is free of
a and
b.
We now find the derivative of
J from Equation (
11) given by:
where
and
.
With our first glance of Equation (
12), we find that
is a
free critical points [
25] for any
. Other free critical points may be found from the roots of
as a function of
.
Useful properties of
J and
regarding the
strange fixed points [
25] and free critical points can be derived in the similar manner as done in Sections 3.1 and 3.2 of [
16]. The important consequences of these properties lead us to the following proposition:
Proposition 1. - (a)
If is any fixed point of J, then so is .
- (b)
If is any critical point of J, then so is .
- (c)
holds for any and any .
- (d)
and any fixed point of J.
The underlying dynamics behind iterative map (
11) will be initiated by investigating the fixed points of
J and their stability. Fixed points of
J can bound from the roots of
:
where
.
Clearly,
is a strange fixed point which may give us an appealing impact on the relevant dynamics. To locate other strange fixed points dependent on
, we seek the roots
z of
in Equation (
13) for given values of
. In view of Proposition 1(a), the strange fixed points of
are found by solving
, i.e.,
where
are the three roots of the relation
.
In view of Equation (
12), we are able to describe the stability of the strange fixed point
using
-values in the following theorem whose proof is the similar to that of Theorem 3.5 from [
16].
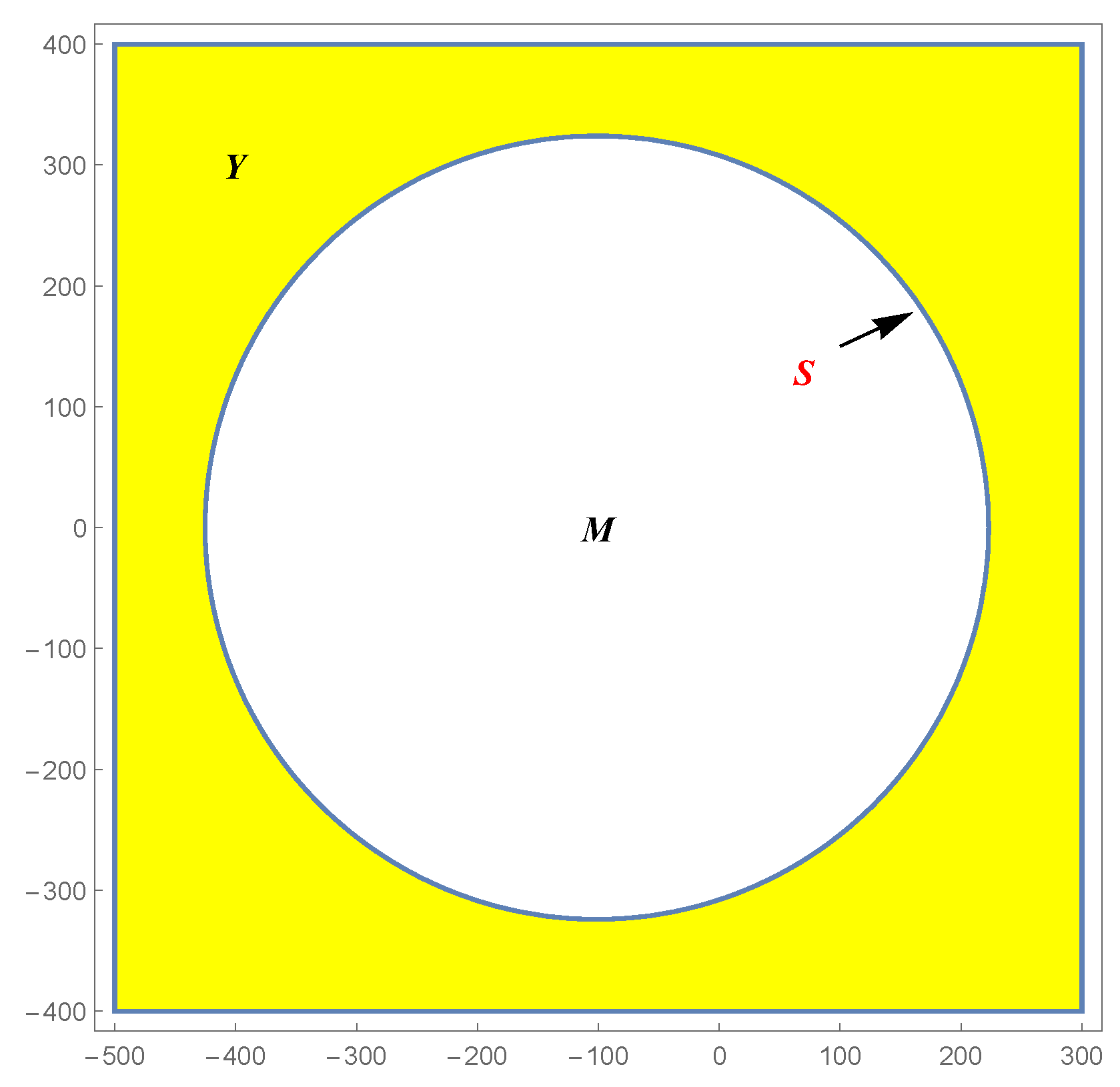
Theorem 2. Let us define , and . Then, the strange fixed point becomes attractive, parabolic, and repulsive, respectively, whenever , , and .
Remark 3. Figure 2 displays Y, S, and M. It is better to call S the stability circle
since the fixed point with λ in a neighborhood of S becomes either repulsive or attractive. 5. Bifurcation in the Parameter Space
Our further investigation on the complex dynamics of conjugated map
given by Equation (
11) is essentially limited to the analysis of long-term behavior of
. A useful task is preferably to use a free critical point
z and generate its orbit under the action of
, which will induce attracting periodic orbits for each given
according to Corollary 1. The orbit behavior of two critical points
z and
of
J is best described in Proposition 1(c) and Remark 4.
Corollary 2. Let be given. If is a q-periodic point of J, then so is .
Proof. With the help of Proposition 1(c) and fixed point invariance property [
16] under topological conjugacy for
q-fold composition of
J with
, we easily find that
for any given
. □
Proposition 2. Let be a fixed point of found from in Equation (13). Let and be two critical points of found from in Equation (12). Suppose that the orbit of critical point approaches a q-periodic point ξ of J, i.e., in the long run for a given and . Then, the orbit of approaches a q-periodic point of . Proof.
after writing out
for any
with
. In view of Proposition 1(c) and Equation (
14), we find:
□
Remark 4. In view of Proposition 2, the orbit of behaves in quite the same way as the other does.
By consulting Section 4.1 of [
16], we now reintroduce the notions of the parameter space
and dynamical plane
to effectively display the iteration dynamics of
J as follows:
In view of Equation (
13), the possible fixed points are given by
and
. When
, there may exist a
q-periodic point in the orbit for
. If
, then the orbit is non-periodic but bounded.
Thanks to the basic properties of the dynamical plane
consisting of a union of attractor basins, extensively studied in [
11], we in this paper only investigate some interesting properties of the parameter plane
. According to Remark 4, we consider only one branch of the critical points
for its typical orbit behavior.
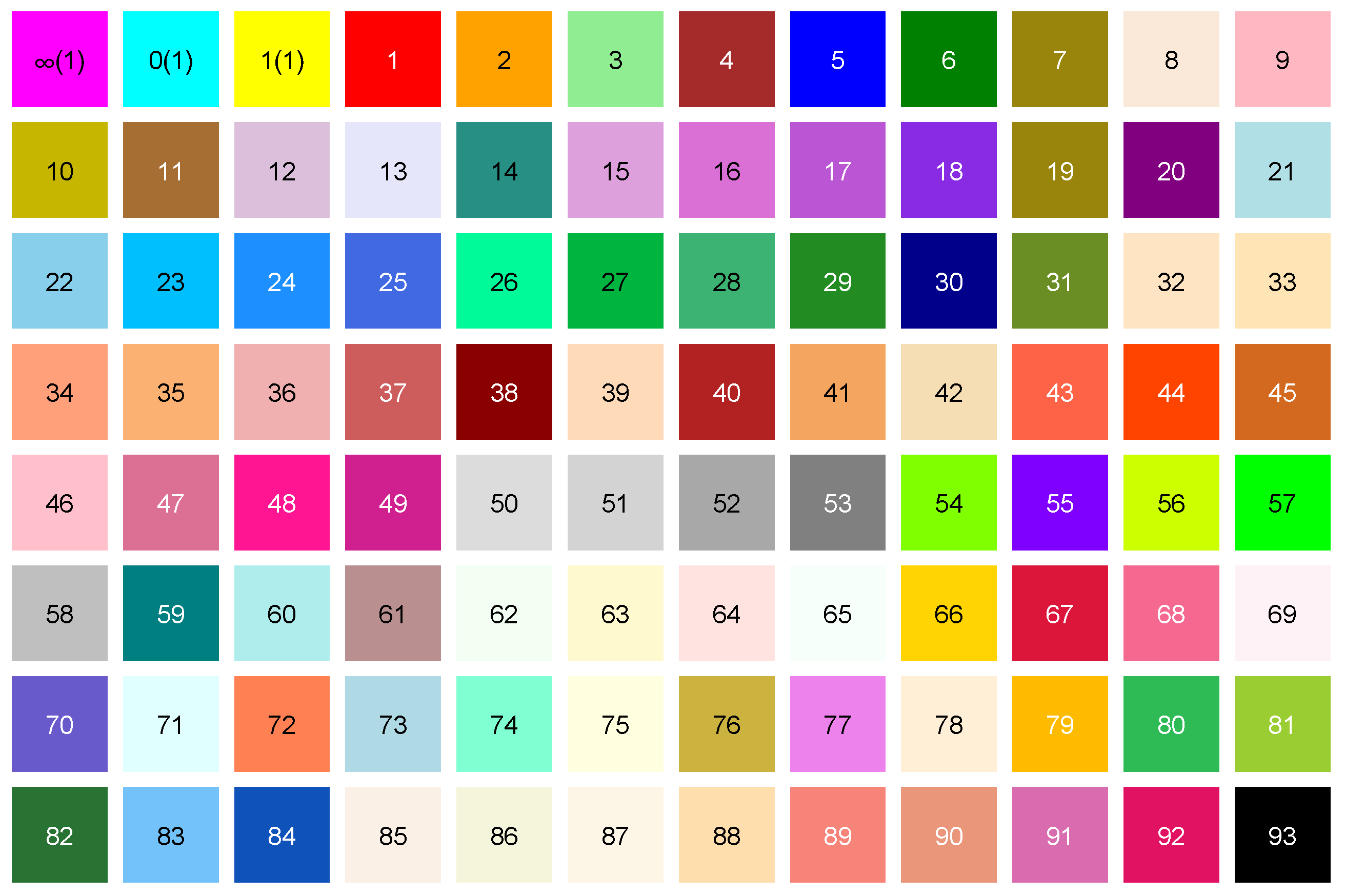
In Figure 4, a parameter space
associated with free critical points
is illustrated. If a
q-periodic orbit is generated under the action of
for
, then
is painted in color
assigned by
Table 1 as well as identified by
Figure 3. Throughout the current computing experiments with the aid of Mathematica [
26], the error bound has been set to
within 3000 iterations to check the
q-periodic convergence of an orbit related to
or
.
The following theorem describes the favorable property of symmetry on the parameter space.
Theorem 3. Parameter space is symmetric about its horizontal axis.
Proof. The proof follows from Theorem 4.3 of [
16] by identifying
in Lemma 3.5 of [
6] such that
and using
from Equation (
11). □
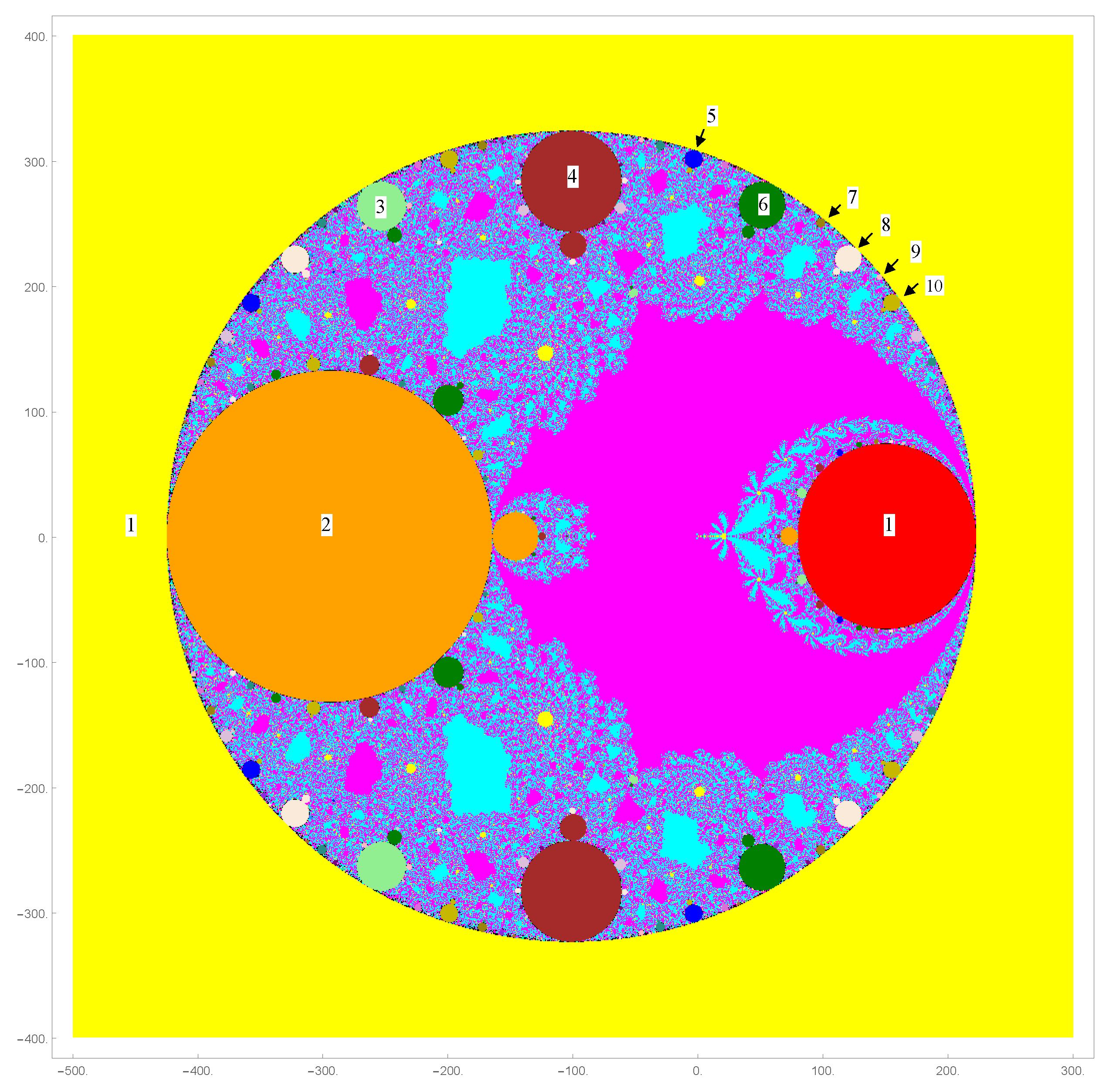
Judging from the parameter spaces in
Figure 4, we instantly find a number of typical regions identified by arrow numbers
. With
selected in a region identified by
q, the critical orbit approaches to a
q-periodic point of
J. Note that the possible fixed points of
from Equation (
13) are
and
given by the roots of
. Similarly, Equation (
12) gives the possible critical points given by the roots of
. Since
,
,
for any
and
is
-dependent, one should pay attention to the orbit behavior of a
-dependent critical point
as
varies in the complex plane. Such an orbit behavior of
is effectively characterized by tracing the relevant limit behavior such that
If
is not a constant but bounded, then the orbit of
will approach a non-periodic but bounded orbit. On the other hand, if
is constant, then we write
for any
with
. Thus, we obtain
implying that
is a
q-periodic point. In case
, then
which implies that
is any attracting
q-periodic point due to
being a bivariate rational function of
z and
; note that
induces a non-periodic bounded point. Hence, any attracting
q-periodic components occur along the boundary
as seen in
.
We further observe the following bifurcation phenomena as varies: when crosses the boundary , the fixed point loses its stability, but another non-periodic bounded point or attracting q-periodic fixed point will gain their stability and begin to emerge along the boundary .
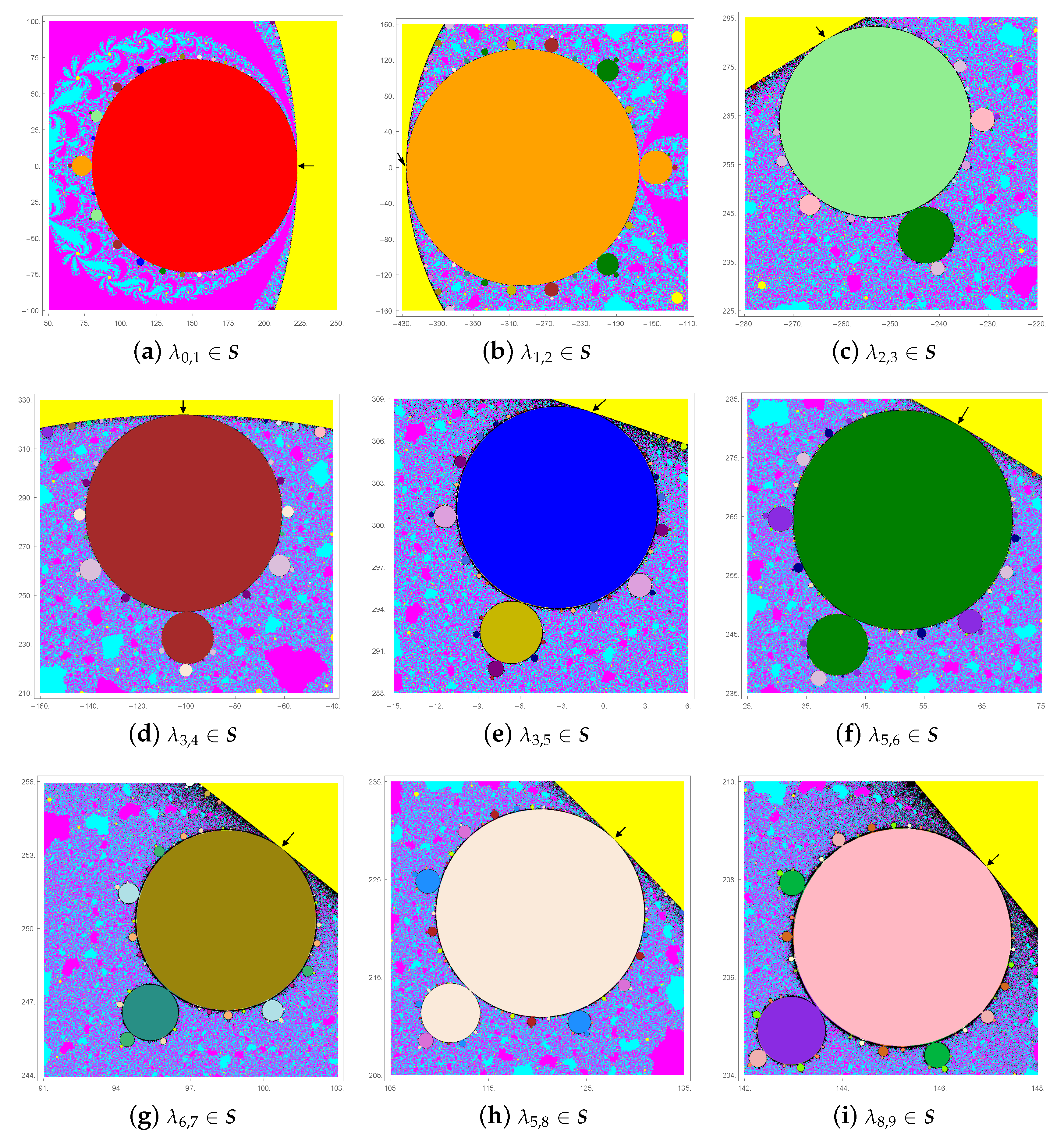
Figure 5 displays components where
q-periodic orbits are generated with
budding from the component
Y associated with the fixed point
. The
q-periodic satellite components with
can be seen, some of which are indicated by numbers
q with arrow lines. Their boundaries are inscribed along the boundary of
Y in the manner of Farey sequence [
27]. The number of
q-periodic satellite components can be determined by means of the lengths of this Farey sequence, which will be discussed later in
Section 5.1.2.
5.1. Locating and Counting Bifurcation Points Budding from Y
We first introduce some notions for a qualitative as well as a quantitative bifurcation analysis. A component
in
is called
hyperbolic if
has a finite attracting cycle for each given
; here, the word ’hyperbolic’ comes from the meaning of ’hyperbolicity’ [
28] of a rational function, not from that of a fixed point of a dynamical system. It turns out that
is an open set with infinitely many connected components, each of which is characterized by the period of the corresponding cycle. From now on, we will omit the word ’hyperbolic’ to describe components under consideration as simply as possible. The notions for
satellite and
primitive components should be referred to those described in [
21]. The primitive components are indeed standing alone themselves.
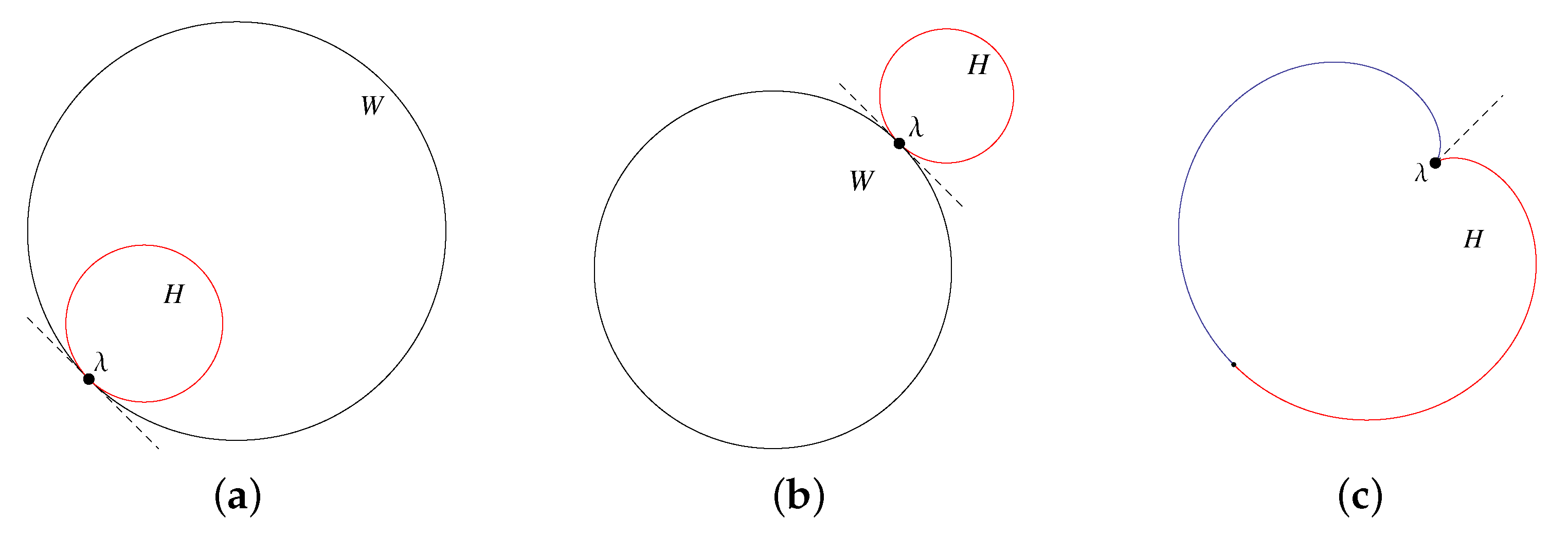
Figure 6 well illustrates typical bifurcation geometries between such two aforementioned components
and
. The location of the control parameter where
buds from
is said to be the
root point [
21] of
. If we view this kind of budding phenomenon from the side of
, then the root point can be regarded as a
bifurcation point of
where it splits into two components based on the lexical meaning of the word
bifurcation.
To develop a technique tracking down such bifurcation points in
, it is useful to define a
k-periodic (hyperbolic) component
as a subset of
. For notational convenience, we now write
as
to locate bifurcation points under discussion. We further characterize
by the following expression:
In particular,
plays the role of a main component from which finite-periodic components are born. A choice of
-dependent free critical points
satisfying
in Equation (
12) would produce
whose
-value leads us to a long-term dynamical behavior with possible periodic, non-periodic or chaotic orbits, as
varies in the complex plane. An analysis of periodic orbits of
in the long run is of our current interest. To fully characterize
, we need to inspect the strange fixed point
with
given by a root of
in Equation (
13). In the current analysis, we are limited to considering satellite components
born along the stability circle
S being associated with the strange fixed point
.
5.1.1. Tracking down Bifurcation Points of Satellite Components Budding from Y
As we can see parameter spaces
in
Figure 4, various components of finite periods bud from the boundary
S of
Y. It would be better to call
Y the
main component due to the fact that satellite components of finite periods bud from
Y as typically configured with
in
Figure 6a.
Let denote the boundary of Y and be a boundary point of . If a period-q component emerges at , then it is natural to name such as the period-q bifurcation point. If a primitive component emerges at , then such a bifurcation point usually turns out to be a cusp point at which two branches of a boundary curve meet together such that the tangent of each branch is equal.
Suppose that a period-
q component
, as shown in
Figure 6, buds at
from
Y for a given
. Then, the
q-periodic point
of
J satisfies the following relations:
where
and
. Let
be a parametric representation for
. It will be shown that relation
is satisfied at
where
Y and
share the common tangent line as illustrated in
Figure 6.
Due to the fact that
in Equation (
11) is a bivariate rational function of both variables
and
, we solve
for
to obtain:
with
as a rational function. Thus, such
will trace a parametric curve in
as a function of
t. As a result, the derivative
computed at the fixed point
is given by:
which implies that
by directly comparing the second and last relations in Label (
18).
Note that
represents the common tangent line evaluated at the period-
q point
in the direction of
t. Solving process of
suggests us the following notion of
–bifurcation point as introduced in the work of [
16]:
Definition 2. For a given , let , with and gcd for , then λ is called the –bifurcation point of Y or –root point of .
According to the values of in Definition 2, the fold bifurcation and the flip bifurcation respectively occur with and , while the Neimark–Sacker bifurcation occurs with all other values of .
In view of Theorem 2 and by a close inspection of the parameter space
, we desire to locate the
–bifurcation point
along
. To this end, from relation
we find
in terms of
:
After substituting in Definition 2, we obtain the following proposition.
Proposition 3. The desired –bifurcation points along are found to befor a given with and gcd
for . Table 2 lists some values of
for
, and some of them are indicated by arrow lines in
Figure 5. The
-bifurcation point is of fold bifurcation and the
-bifurcation point is of flip bifurcation. All other
–bifurcation points are of Neimark–Sacker bifurcation. It is interesting to observe intuitively that
q-periodic components
for
are born in descending order of its area size monotonically clockwise along the upper half-circle of
S.
5.1.2. Counting Bifurcation Points of Satellite Components Budding from Y
The Farey sequence
is a set of rational numbers
with coprime integers
p and
q satisfying
arranged in ascending order by size. Charles Haros [
29] discovered this sequence in 1806, but Augustin-Louis Cauchy [
30] named it after geologist John Farey [
31].
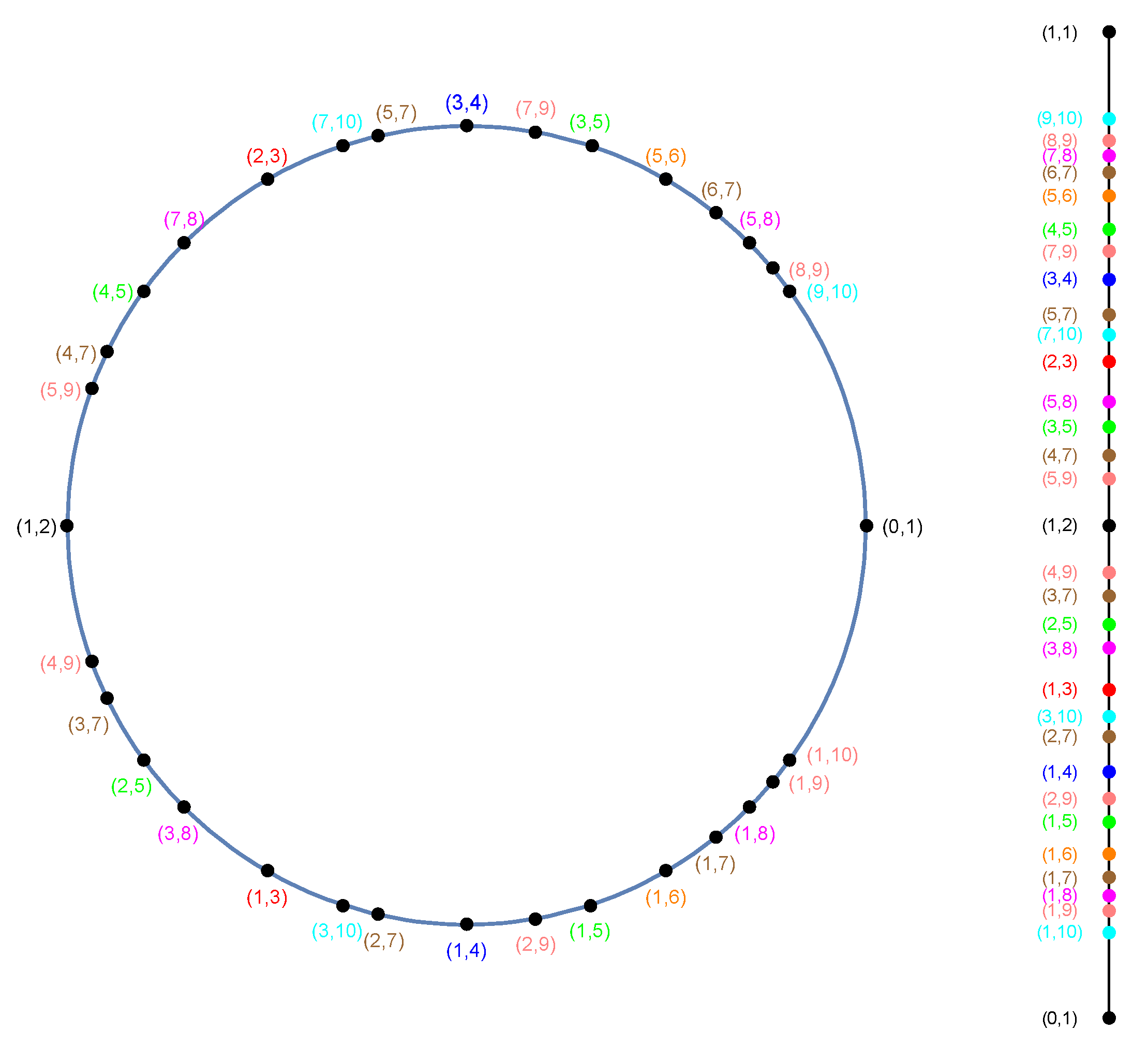
On the left side of
Figure 7, we find dots with ordered pairs of numbers
indicating circumferential locations of bifurcation points
along the boundary of
Y. Furthermore, on the right side of
Figure 7, we also find their homeomorphic images onto the upright unit interval.
Thus,
if
with coprime integers
ℓ and
q, treating the numbers
and
. For example,
Here,
simply indicates the top end of the upright unit interval and matches the circumferential location with
. As described in [
27], we introduce the well-known Farey addition: if
and
with
are Farey neighbors, then the mediant is given by:
and satisfies
.
Figure 7 illustrates such properties as typically shown by an example:
.
Indeed, the total number of bifurcation points of with is given by , with as the length of stated in the theorem below.
Theorem 4. With as Euler’s totient function, the length of Farey sequence is given by: Proof. The Farey Sequence contains every reduced fraction with denominators at most . If we want to create we have to add all reduced fractions with a denominator that is coprime to n. Therefore, with . Hence, the proof is completed. □
A result of the above theorem directly leads us to:
Corollary 3. The total number of q-periodic satellite components budding from Y with is given by the summatory Euler’s totient function: 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}