R-Adaptive Multisymplectic and Variational Integrators


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Overview
- Discretization of the physical PDE
- Mesh adaptation strategy
- Coupling the mesh equations to the physical equations
1.2. Outline
2. Control-Theoretic Approach to r-Adaptation
2.1. Reparametrized Lagrangian
2.2. Spatial Finite Element Discretization
2.3. Differential-Algebraic Formulation and Time Integration
2.4. Moving Mesh Partial Differential Equations
2.5. Example
2.6. Backward Error Analysis
3. Lagrange Multiplier Approach to r-Adaptation
3.1. Reparametrized Lagrangian
3.2. Spatial Finite Element Discretization
3.3. Invertibility of the Legendre Transform
3.4. Existence and Uniqueness of Solutions
3.5. Constraints and Adaptation Strategy
3.5.1. Global Constraint
3.5.2. Local Constraint
3.6. DAE Formulation of the Equations of Motion
3.7. Backward error analysis
4. Multisymplectic Field Theory Formalism
4.1. Background Material
4.1.1. Lagrangian Mechanics and Veselov-Type Discretizations
4.1.2. Multisymplectic Geometry and Lagrangian Field Theory
4.1.3. Multisymplectic Variational Integrators
4.2. Analysis of the Control-Theoretic Approach
4.2.1. Continuous Setting
4.2.2. Discretization
4.3. Analysis of the Lagrange Multiplier Approach
4.3.1. Continuous Setting
- 1.
- is an extremum of ,
- 2.
- There exists an extremum of such that ,
4.3.2. Discretization
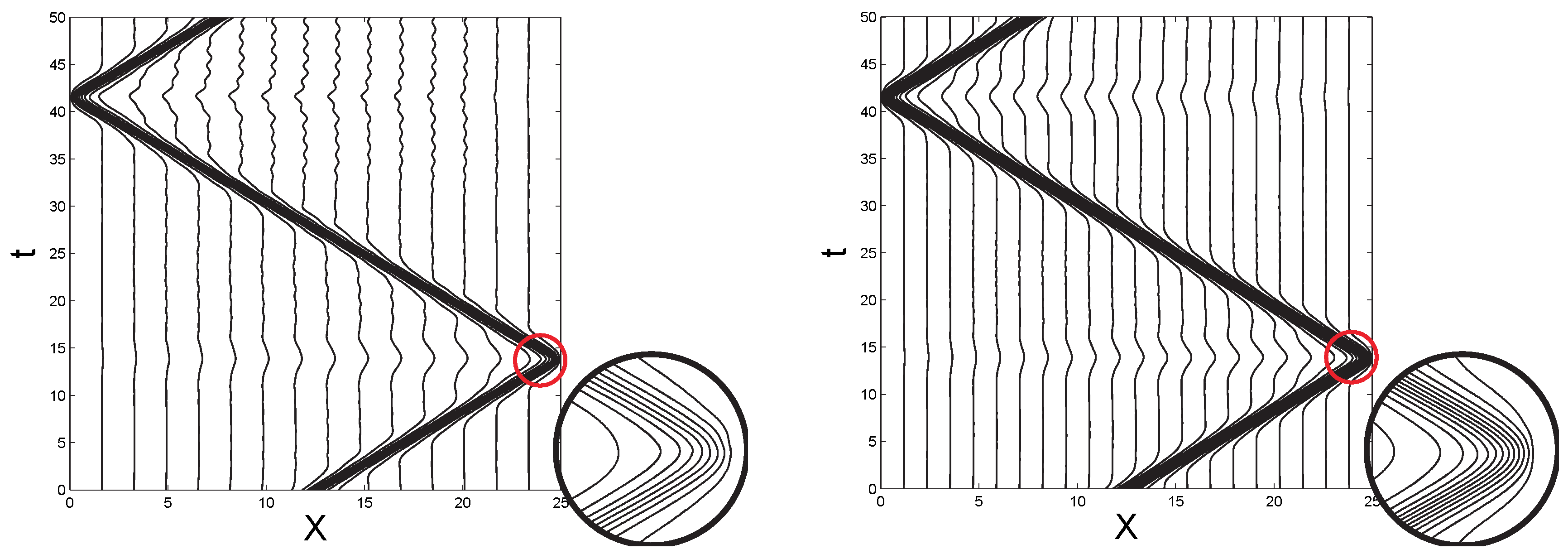
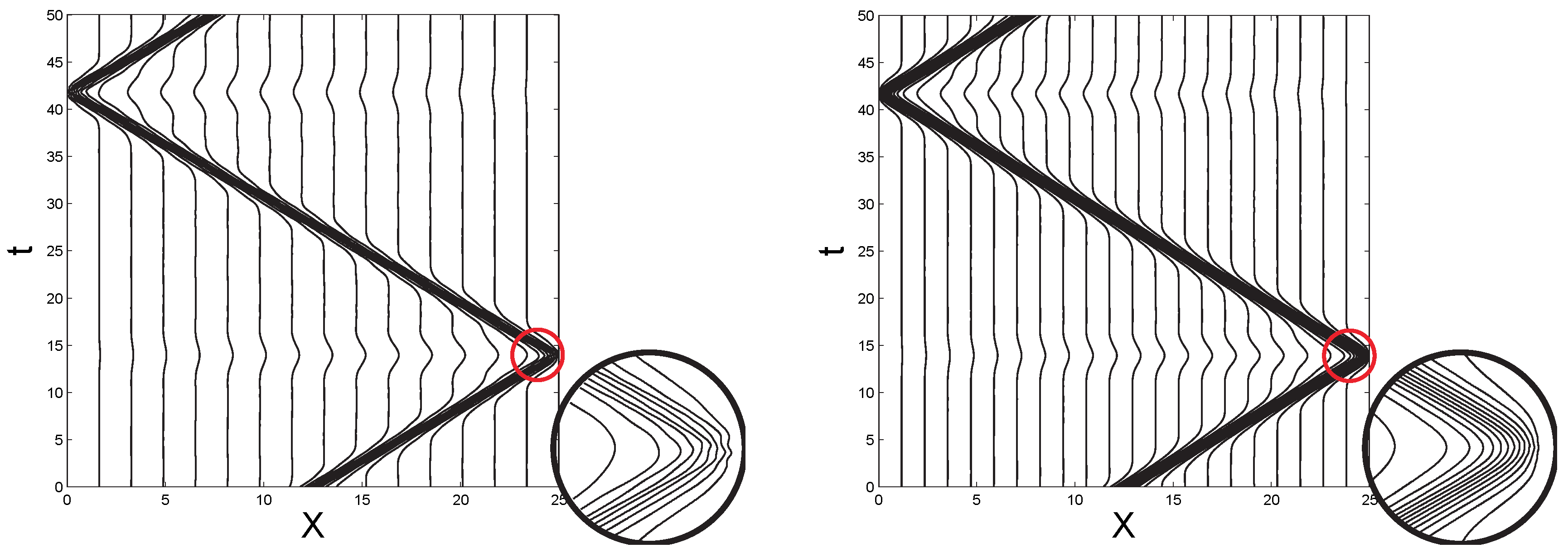
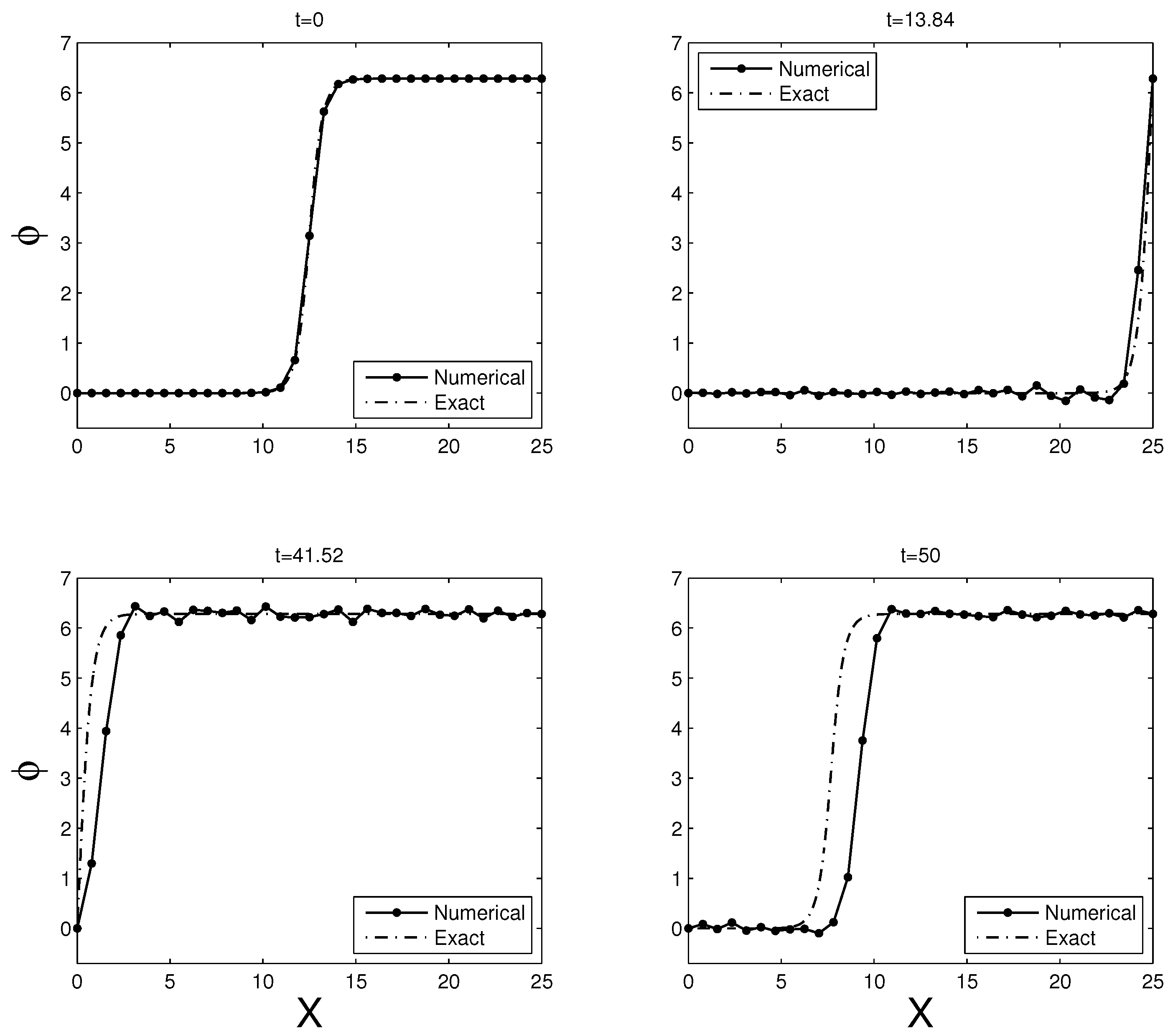
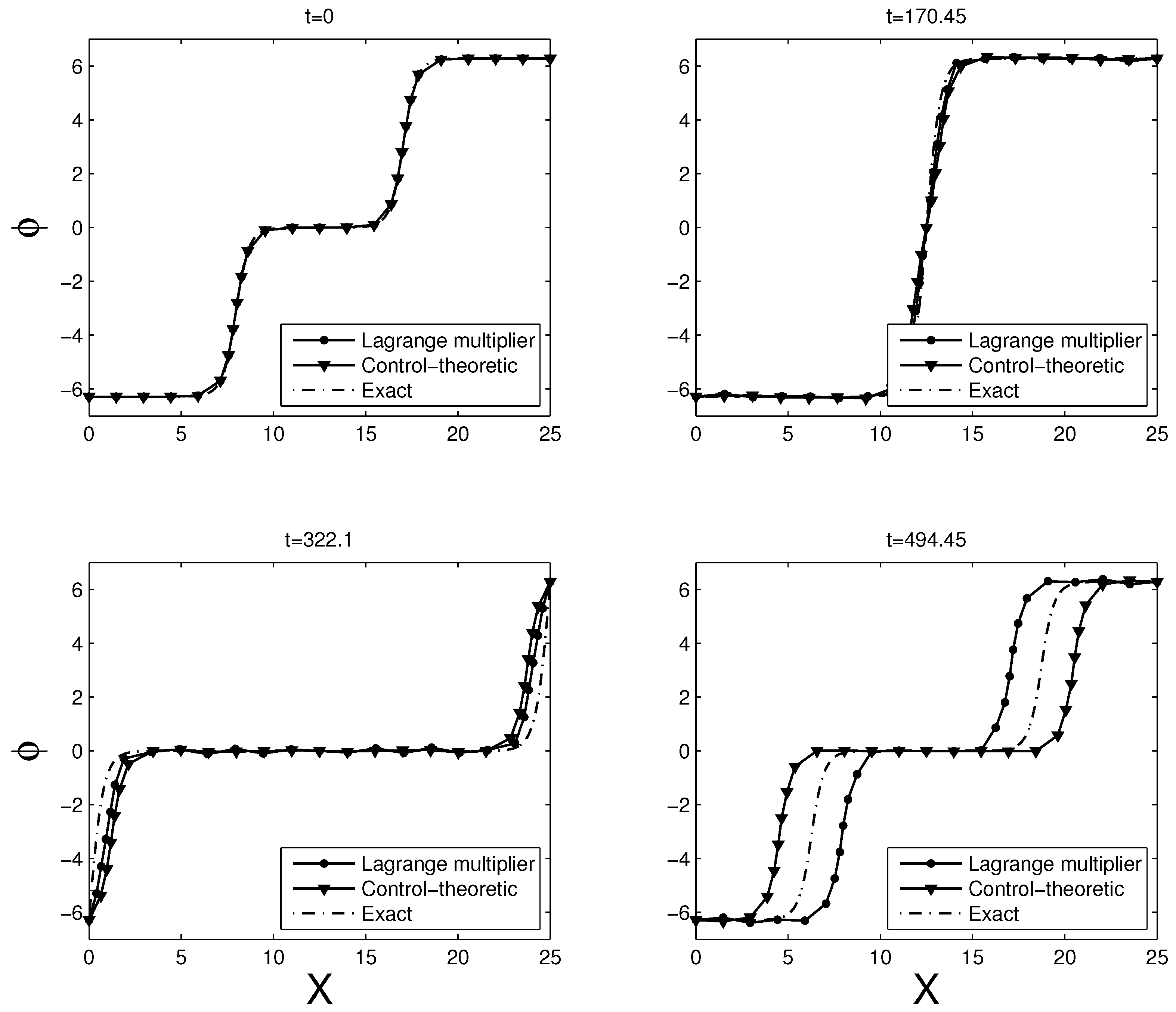
5. Numerical Results
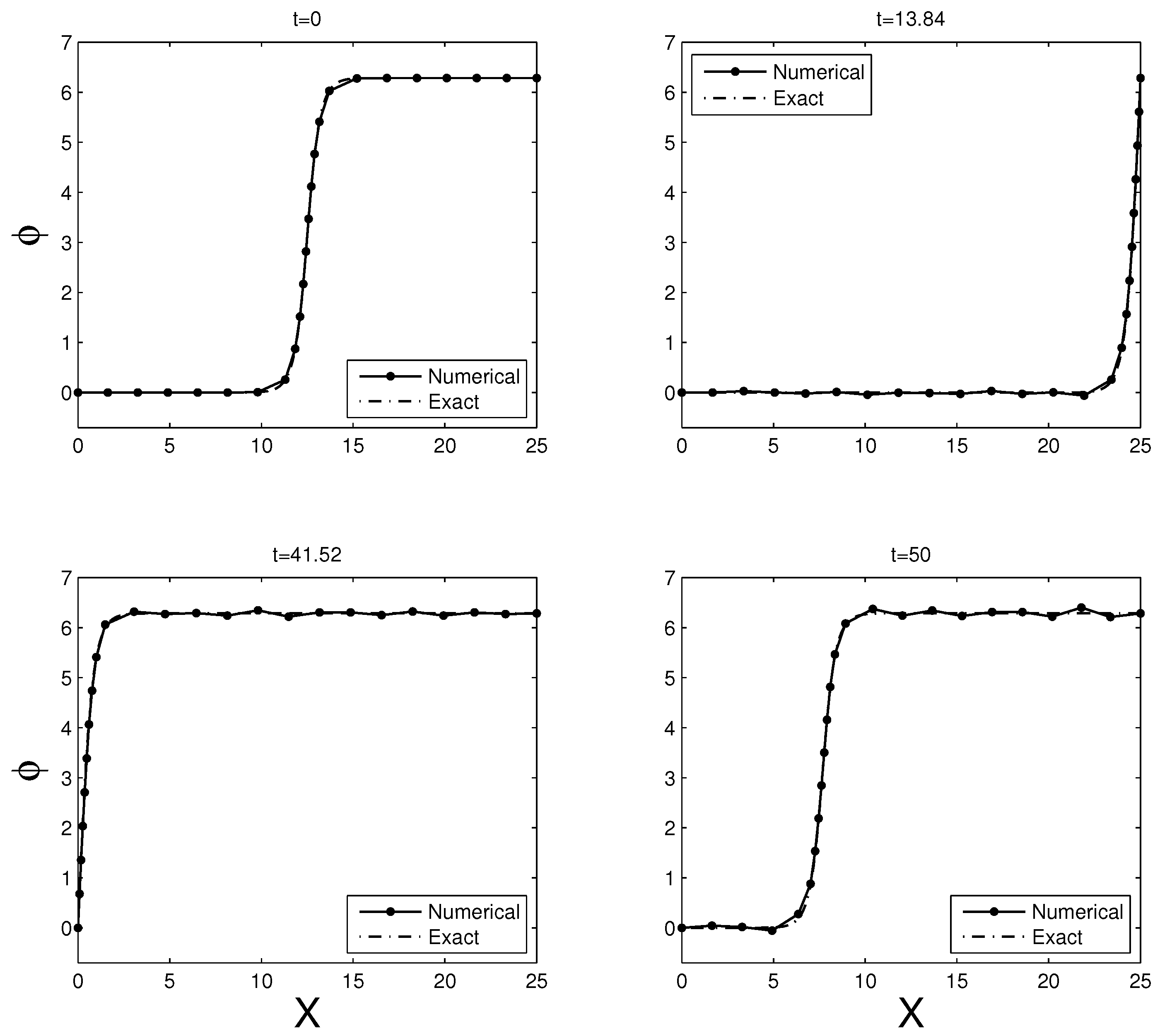
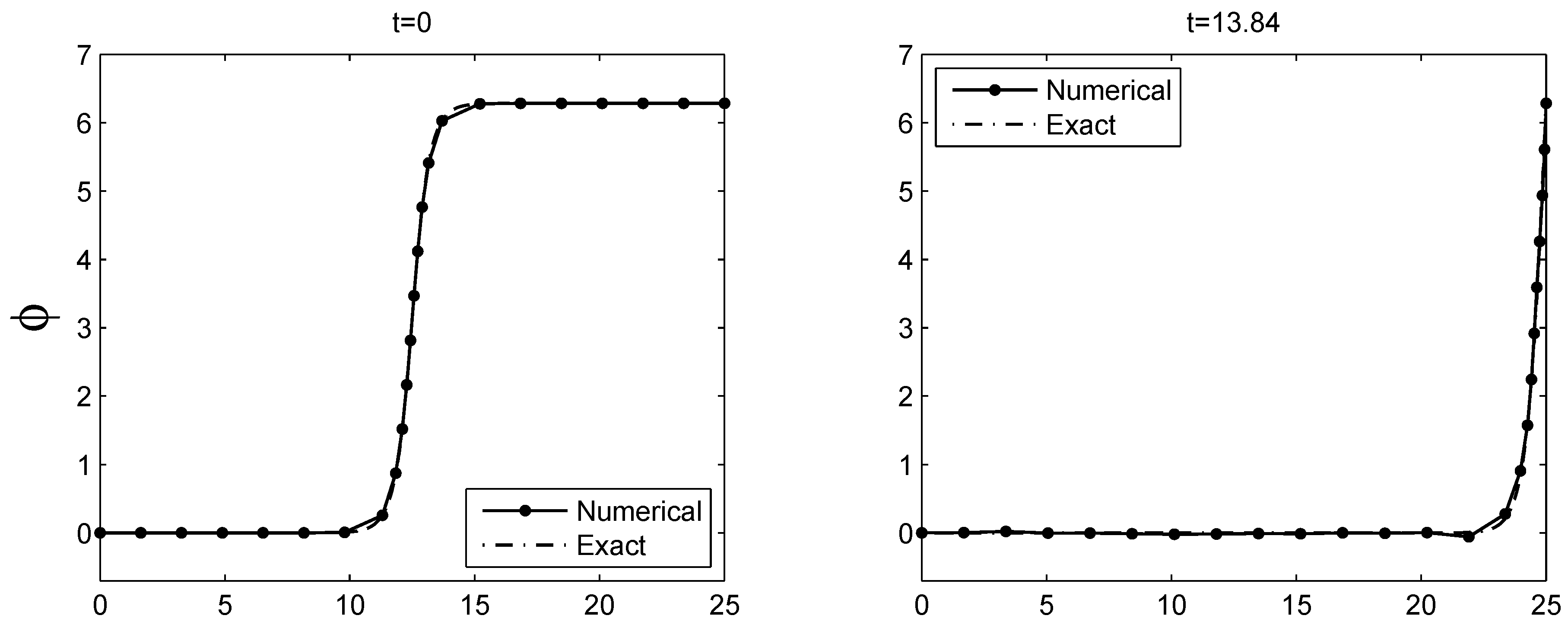
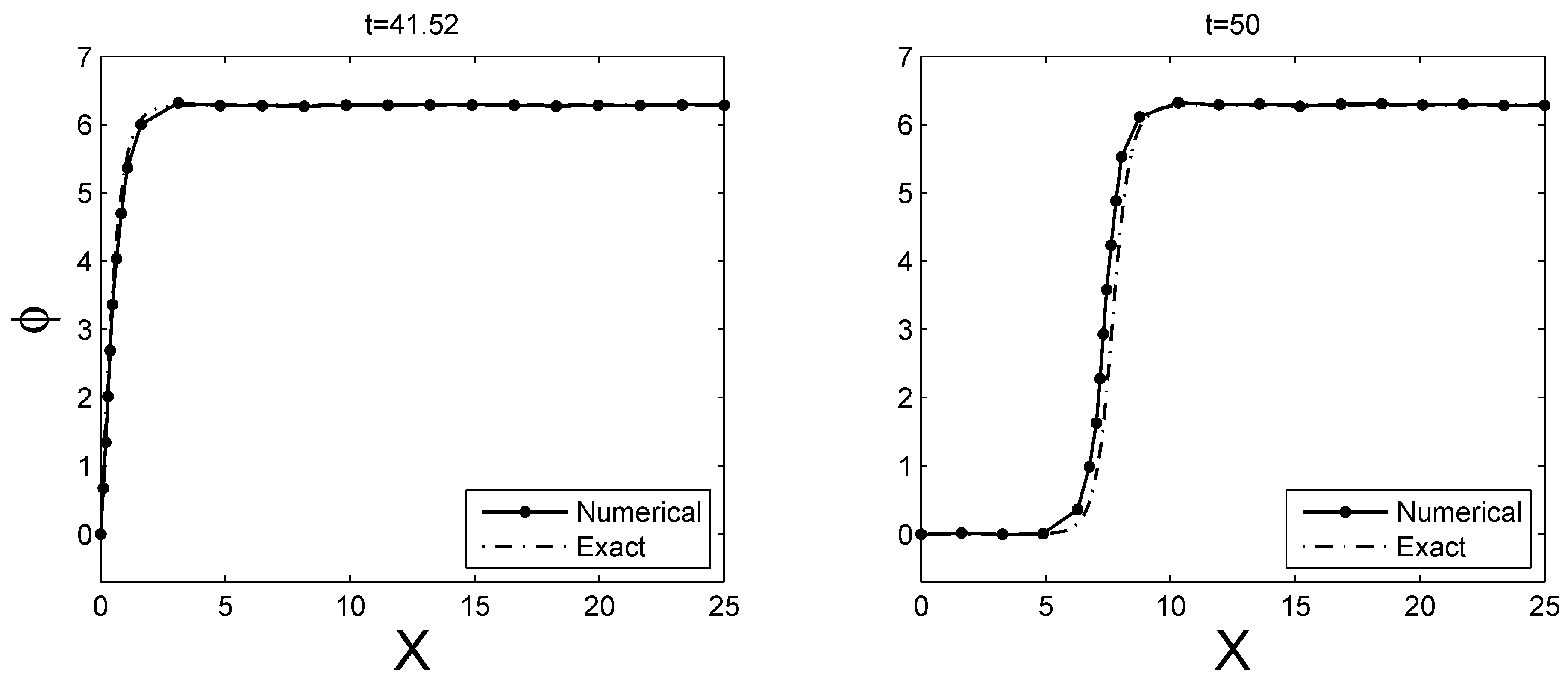
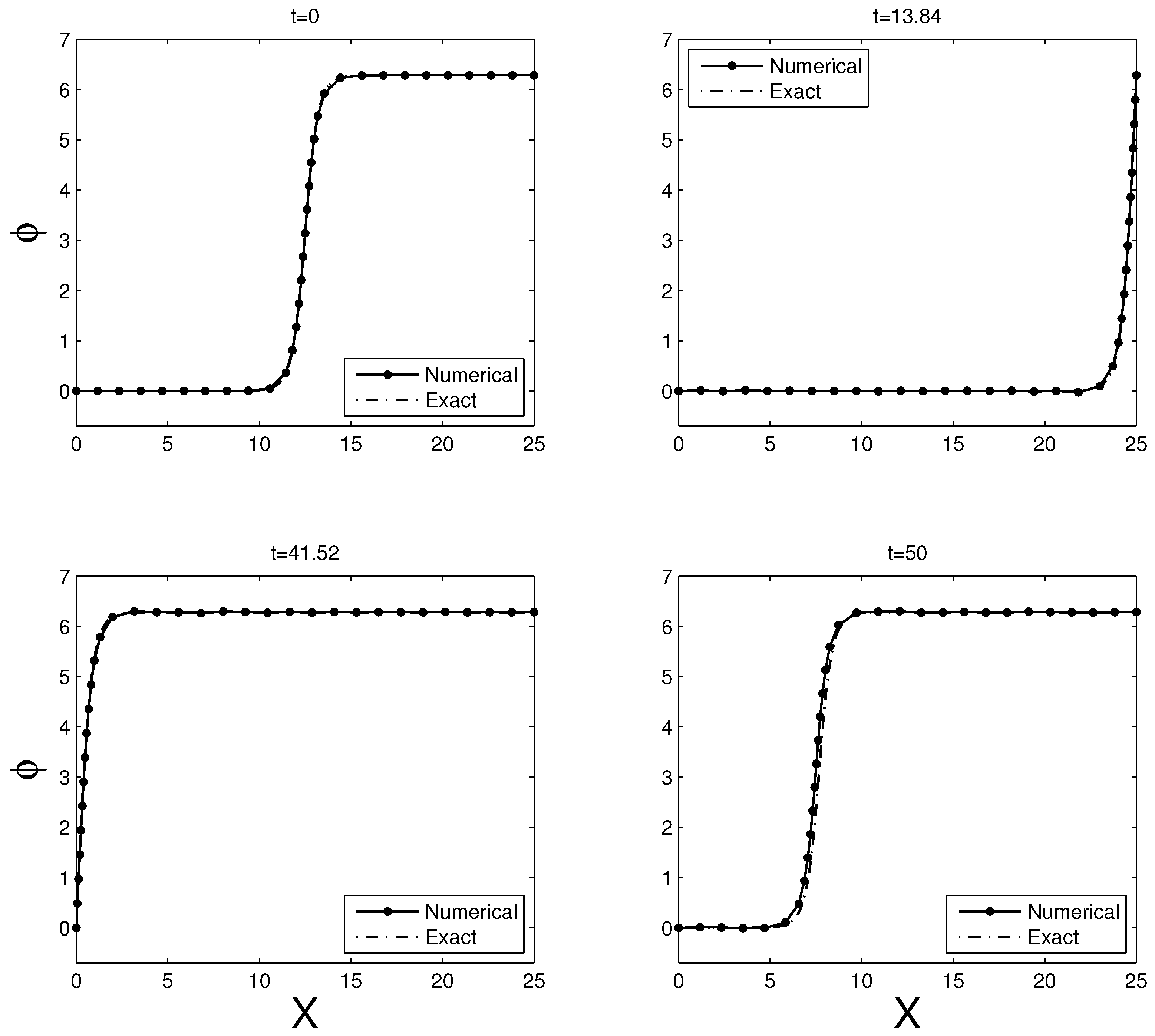
5.1. The Sine–Gordon Equation
5.2. Generating Consistent Initial Conditions
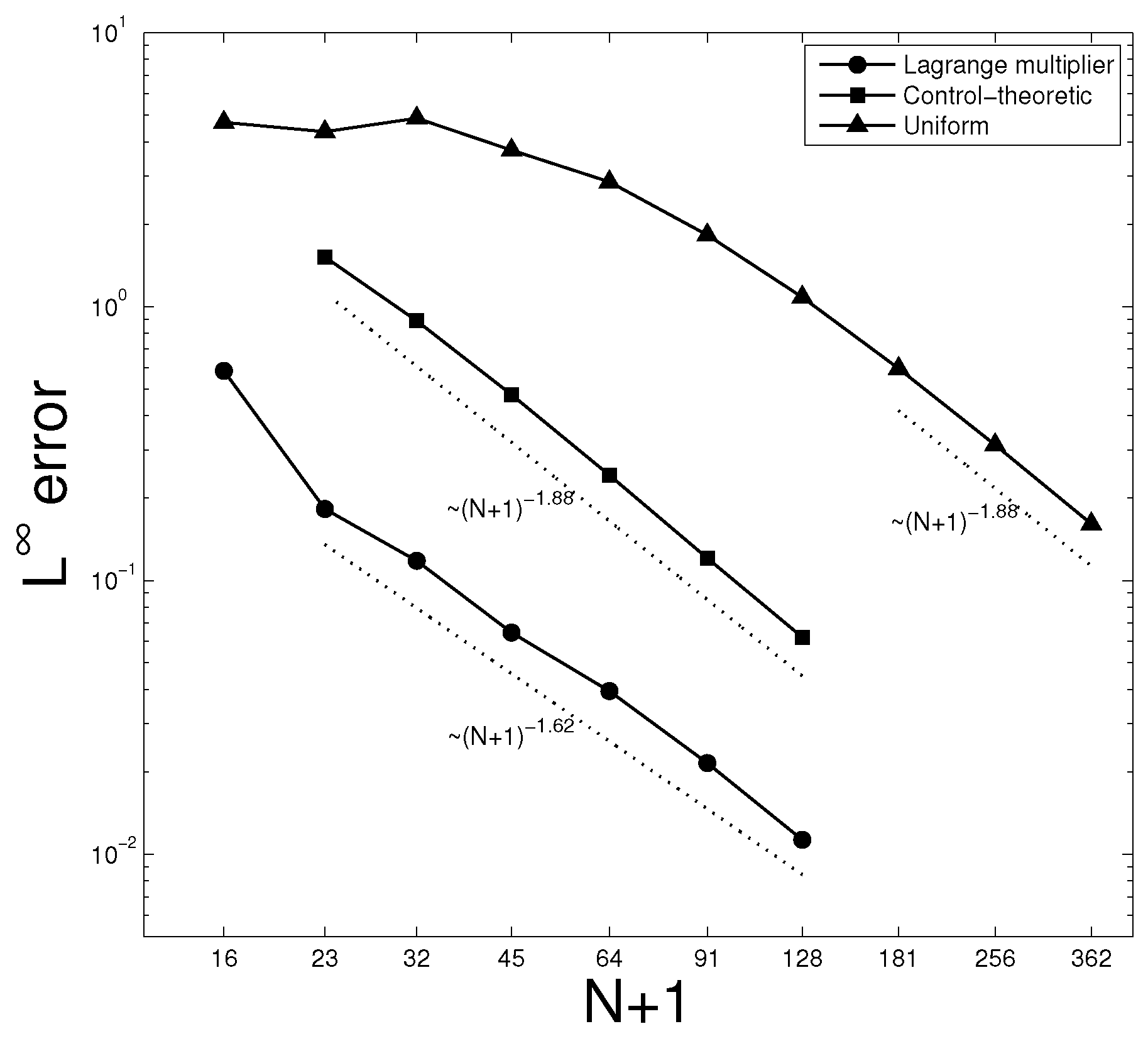
5.3. Convergence
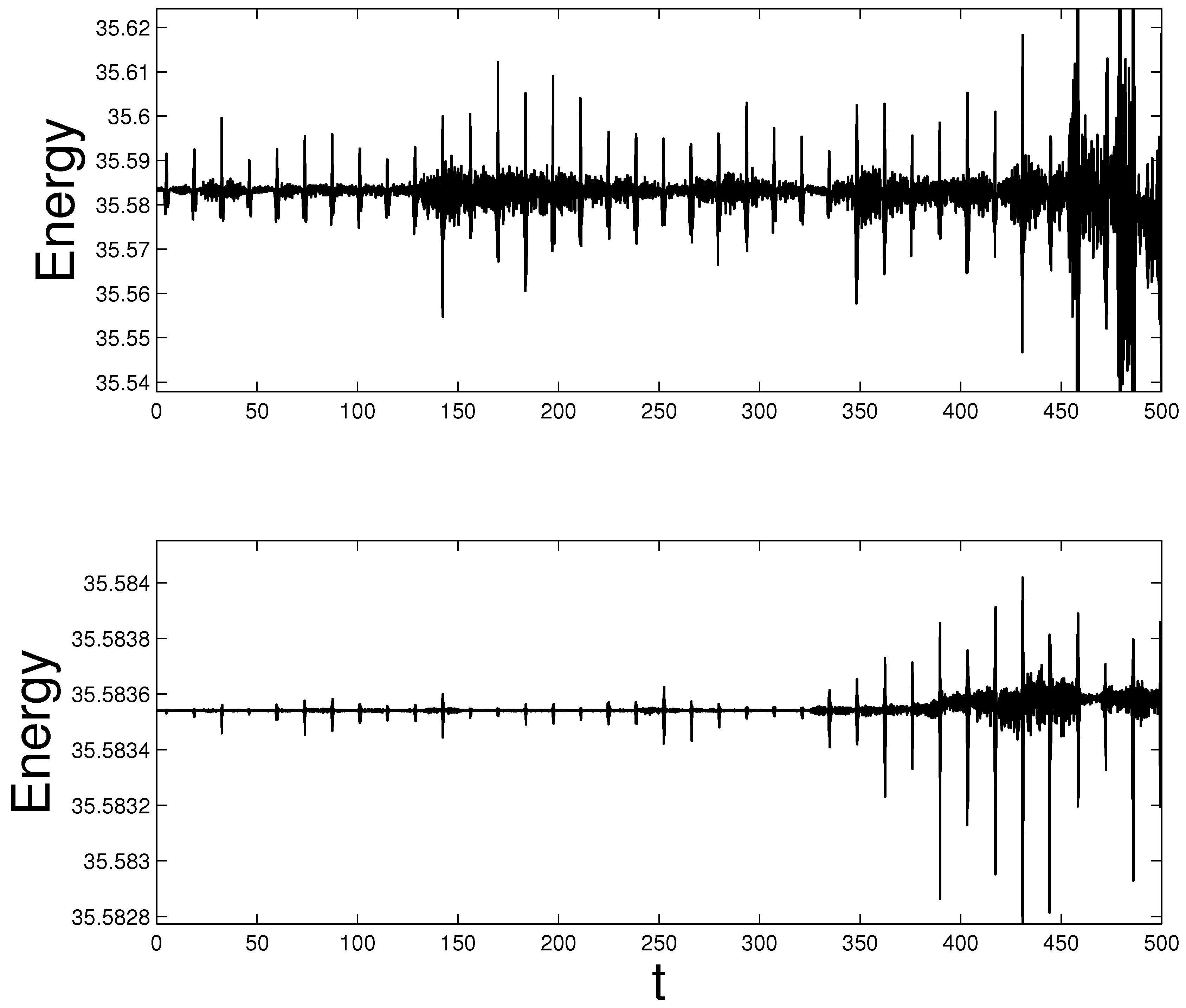
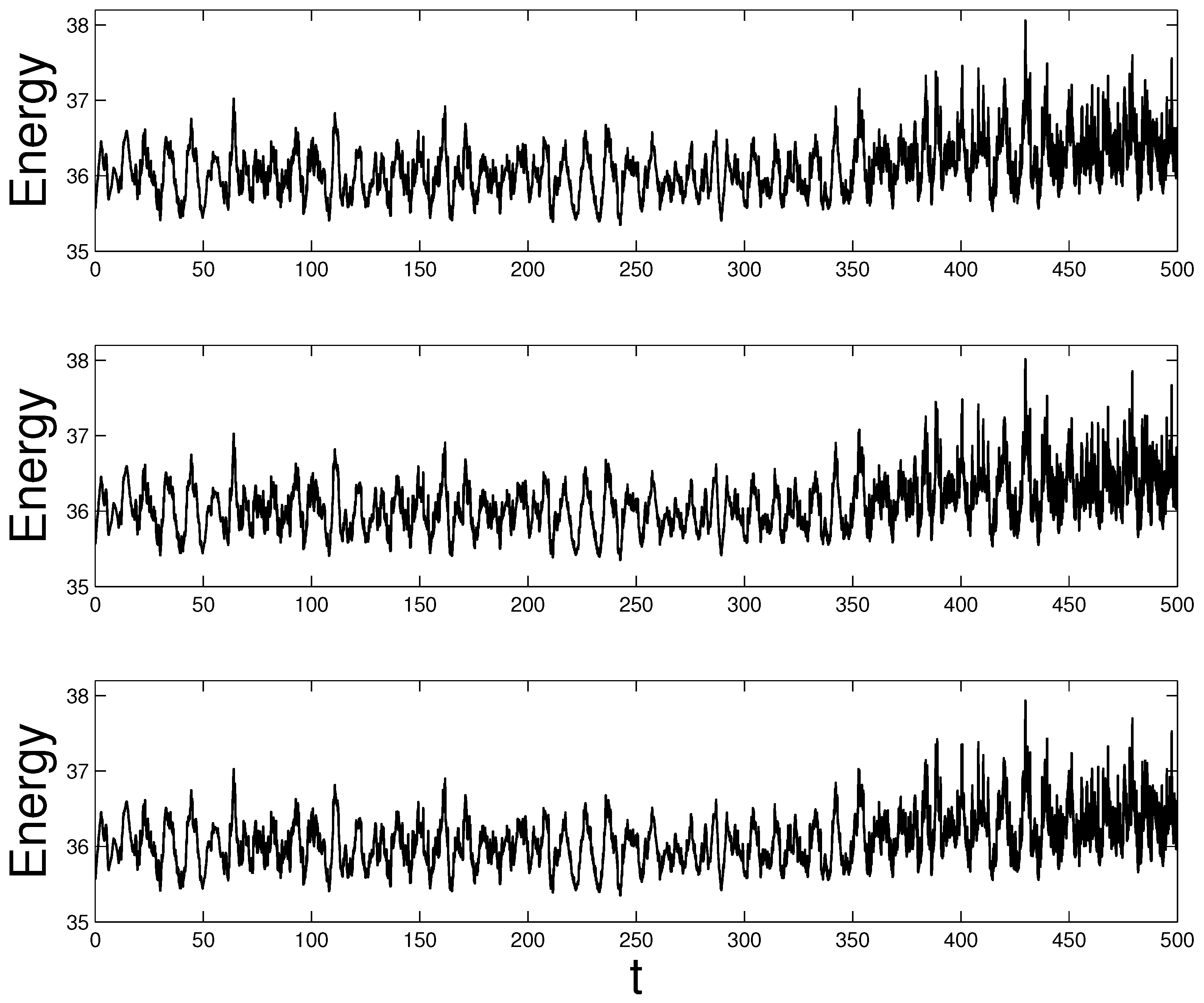
5.4. Energy Conservation
6. Summary and Future Work
6.1. Non-Hyperbolic Equations
6.2. Hamiltonian Field Theories
6.3. Time Adaptation Based on Local Error Estimates
6.4. Constrained Multisymplectic Field Theories
6.5. Mesh Smoothing and Variational Nonholonomic Integrators
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations; Springer Series in Computational Mathematics; Springer: New York, NY, USA, 2002. [Google Scholar]
- Marsden, J.E.; West, M. Discrete mechanics and variational integrators. Acta Numer. 2001, 10, 357–514. [Google Scholar] [CrossRef] [Green Version]
- Marsden, J.E.; Patrick, G.W.; Shkoller, S. Multisymplectic geometry, variational integrators, and nonlinear PDEs. Commun. Math. Phys. 1998, 199, 351–395. [Google Scholar] [CrossRef]
- Lew, A.; Marsden, J.E.; Ortiz, M.; West, M. Asynchronous variational integrators. Arch. Ration. Mech. Anal. 2003, 167, 85–146. [Google Scholar] [CrossRef]
- Stern, A.; Tong, Y.; Desbrun, M.; Marsden, J.E. Variational integrators for Maxwell’s equations with sources. PIERS Online 2008, 4, 711–715. [Google Scholar] [CrossRef]
- Pavlov, D.; Mullen, P.; Tong, Y.; Kanso, E.; Marsden, J.E.; Desbrun, M. Structure-preserving discretization of incompressible fluids. Phys. D: Nonlinear Phenom. 2011, 240, 443–458. [Google Scholar] [CrossRef] [Green Version]
- Budd, C.J.; Huang, W.; Russell, R.D. Adaptivity with moving grids. Acta Numer. 2009, 18, 111–241. [Google Scholar] [CrossRef]
- Huang, W.; Russell, R. Adaptive Moving Mesh Methods. In Applied Mathematical Sciences; Springer: New York, NY, USA, 2011; Volume 174. [Google Scholar]
- Nijmeijer, H.; van der Schaft, A. Nonlinear Dynamical Control Systems; Springer: New York, NY, USA, 1990. [Google Scholar]
- Gotay, M. Presymplectic Manifolds, Geometric Constraint Theory and the Dirac-Bergmann Theory of Constraints. Ph.D. Thesis, University of Maryland, College Park, MD, USA, 1979. [Google Scholar]
- Brenan, K.; Campbell, S.; Petzold, L. Numerical Solution of Initial-Value Problems in Differential-Algebraic Equations; Classics in Applied Mathematics, Society for Industrial and Applied Mathematics; Siam: Philadelphia, PA, USA, 1996. [Google Scholar]
- Hairer, E.; Wanner, G. Solving Ordinary Differential Equations II: Stiff and Differential-Algebraic Problems, 2nd ed.; Springer Series in Computational Mathematics; Springer: New York, NY, USA, 1996; Volume 14. [Google Scholar]
- Hairer, E.; Lubich, C.; Roche, M. The Numerical Solution of Differential-Algebraic Systems by Runge-Kutta Methods; Lecture Notes in Math. 1409; Springer: New York, NY, USA, 1989. [Google Scholar]
- Hairer, E.; Nørsett, S.; Wanner, G. Solving Ordinary Differential Equations I: Nonstiff Problems, 2nd ed.; Springer Series in Computational Mathematics; Springer: New York, NY, USA, 1993; Volume 8. [Google Scholar]
- Ebin, D.G.; Marsden, J. Groups of Diffeomorphisms and the Motion of an Incompressible Fluid. Ann. Math. 1970, 92, 102–163. [Google Scholar] [CrossRef]
- Evans, L. Partial Differential Equations; Graduate Studies in Mathematics; American Mathematical Society: Providence, RI, USA, 2010. [Google Scholar]
- Rabier, P.J.; Rheinboldt, W.C. Theoretical and Numerical Analysis of Differential-Algebraic Equations. In Handbook of Numerical Analysis; Ciarlet, P.G., Lion, J.L., Eds.; Elsevier Science B.V.: Amsterdam, The Netherlands, 2002; Volume 8, pp. 183–540. [Google Scholar]
- Reißig, G.; Boche, H. On singularities of autonomous implicit ordinary differential equations. IEEE Trans. Circuits Syst. I: Fundam. Theory Appl. 2003, 50, 922–931. [Google Scholar] [CrossRef]
- Rabier, P.J. Implicit differential equations near a singular point. J. Math. Anal. Appl. 1989, 144, 425–449. [Google Scholar] [CrossRef] [Green Version]
- Rabier, P.J.; Rheinboldt, W.C. A general existence and uniqueness theory for implicit differential-algebraic equations. J. Differ. Integral Equ. 1991, 4, 563–582. [Google Scholar]
- Rabier, P.J.; Rheinboldt, W.C. A geometric treatment of implicit differential-algebraic equations. J. Differ. Equ. 1994, 109, 110–146. [Google Scholar] [CrossRef]
- Rabier, P.J.; Rheinboldt, W.C. On impasse points of quasilinear differential-algebraic equations. J. Math. Anal. Appl. 1994, 181, 429–454. [Google Scholar] [CrossRef]
- Rabier, P.J.; Rheinboldt, W.C. On the computation of impasse points of quasilinear differential-algebraic equations. Math. Comput. 1994, 62, 133–154. [Google Scholar] [CrossRef] [Green Version]
- Miller, K.; Miller, R.N. Moving finite elements I. SIAM J. Numer. Anal. 1981, 18, 1019–1032. [Google Scholar] [CrossRef]
- Miller, K. Moving finite elements II. SIAM J. Numer. Anal. 1981, 18, 1033–1057. [Google Scholar] [CrossRef]
- Zielonka, M.; Ortiz, M.; Marsden, J. Variational r-adaption in elastodynamics. Int. J. Numer. Methods Eng. 2008, 74, 1162–1197. [Google Scholar] [CrossRef]
- Jay, L. Symplectic partitioned Runge-Kutta methods for constrained Hamiltonian systems. SIAM J. Numer. Anal. 1996, 33, 368–387. [Google Scholar] [CrossRef]
- Jay, L.O. Structure Preservation for Constrained Dynamics with Super Partitioned Additive Runge–Kutta Methods. SIAM J. Sci. Comput. 1998, 20, 416–446. [Google Scholar] [CrossRef]
- Leimkuhler, B.J.; Skeel, R.D. Symplectic Numerical Integrators in Constrained Hamiltonian Systems. J. Comput. Phys. 1994, 112, 117–125. [Google Scholar] [CrossRef] [Green Version]
- Leimkuhler, B.; Reich, S. Simulating Hamiltonian Dynamics; Cambridge Monographs on Applied and Computational Mathematics; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Leyendecker, S.; Marsden, J.; Ortiz, M. Variational integrators for constrained dynamical systems. ZAMM— J. Appl. Math. Mech./Z. Angew. Math. Mech. 2008, 88, 677–708. [Google Scholar] [CrossRef] [Green Version]
- Marsden, J.; Ratiu, T. Introduction to Mechanics and Symmetry; Texts in Applied Mathematics; Springer: New York, NY, USA, 1994; Volume 17. [Google Scholar]
- Saunders, D. The Geometry of Jet Bundles; London Mathematical Society Lecture Note Series; Cambridge University Press: Cambridge, UK, 1989; Volume 142. [Google Scholar]
- Gotay, M.; Isenberg, J.; Marsden, J.; Montgomery, R. Momentum Maps and Classical Relativistic Fields. Part I: Covariant Field Theory. Unpublished. arXiv:physics/9801019.
- Kouranbaeva, S.; Shkoller, S. A variational approach to second-order multisymplectic field theory. J. Geom. Phys. 2000, 35, 333–366. [Google Scholar] [CrossRef] [Green Version]
- Gotay, M. A multisymplectic framework for classical field theory and the calculus of variations I: covariant Hamiltonian formulation. In Mechanics, Analysis and Geometry: 200 Years after Lagrange; Francavigila, M., Ed.; North-Holland: Amsterdam, The Netherlands, 1991; pp. 203–235. [Google Scholar]
- Bloch, A. Nonholonomic Mechanics and Control; Interdisciplinary Applied Mathematics; Springer: New York, NY, USA, 2003. [Google Scholar]
- Bloch, A.M.; Crouch, P.E. Optimal Control, Optimization, and Analytical Mechanics. In Mathematical Control Theory; Baillieul, J., Willems, J., Eds.; Springer: New York, NY, USA, 1999; pp. 268–321. [Google Scholar] [CrossRef]
- Bloch, A.M.; Krishnaprasad, P.; Marsden, J.E.; Murray, R.M. Nonholonomic mechanical systems with symmetry. Arch. Ration. Mech. Anal. 1996, 136, 21–99. [Google Scholar] [CrossRef] [Green Version]
- Cortés, J.; de León, M.; de Diego, D.; Martínez, S. Geometric Description of Vakonomic and Nonholonomic Dynamics. Comparison of Solutions. SIAM J. Control. Optim. 2002, 41, 1389–1412. [Google Scholar] [CrossRef] [Green Version]
- Marsden, J.E.; Pekarsky, S.; Shkoller, S.; West, M. Variational methods, multisymplectic geometry and continuum mechanics. J. Geom. Phys. 2001, 38, 253–284. [Google Scholar] [CrossRef] [Green Version]
- Drazin, P.; Johnson, R. Solitons: An Introduction; Cambridge Computer Science Texts; Cambridge University Press: Cambridge, UK, 1989. [Google Scholar]
- Rajaraman, R. Solitons and Instantons: An Introduction to Solitons and Instantons in Quantum Field Theory; North-Holland personal library, North-Holland Publishing Company: Amsterdam, The Netherlands, 1982. [Google Scholar]
- Allgower, E.; Georg, K. Introduction to Numerical Continuation Methods; Classics in Applied Mathematics, Society for Industrial and Applied Mathematics; SIAM: Philadelphia, PA, USA, 2003. [Google Scholar]
- Beckett, G.; Mackenzie, J.; Ramage, A.; Sloan, D. On The Numerical Solution of One-Dimensional PDEs Using Adaptive Methods Based on Equidistribution. J. Comput. Phys. 2001, 167, 372–392. [Google Scholar] [CrossRef]
- Wacher, A. A comparison of the String Gradient Weighted Moving Finite Element method and a Parabolic Moving Mesh Partial Differential Equation method for solutions of partial differential equations. Cent. Eur. J. Math. 2013, 11, 642–663. [Google Scholar] [CrossRef]
- Camassa, R.; Holm, D.D. An integrable shallow water equation with peaked solitons. Phys. Rev. Lett. 1993, 71, 1661–1664. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Camassa, R.; Holm, D.D.; Hyman, J. A new integrable shallow water equation. Adv. Appl. Mech. 1994, 31, 1–31. [Google Scholar]
- Chen, J.B.; Qin, M.Z. A multisymplectic variational integrator for the nonlinear Schrödinger equation. Numer. Methods Partial. Differ. Equ. 2002, 18, 523–536. [Google Scholar] [CrossRef]
- Faou, E. Geometric Numerical Integration and Schrödinger Equations; Zurich Lectures in Advanced Mathematics; European Mathematical Society: Zurich, Switzerland, 2012. [Google Scholar]
- Gotay, M. A multisymplectic approach to the KdV equation. In Differential Geometric Methods in Theoretical Physics; NATO Advanced Science Institutes Series C: Mathematical and Physical Sciences; Springer: Dordrecht, The Netherlands, 1988; Volume 250, pp. 295–305. [Google Scholar]
- Leok, M.; Zhang, J. Discrete Hamiltonian variational integrators. IMA J. Numer. Anal. 2011, 31, 1497–1532. [Google Scholar] [CrossRef]
- Vankerschaver, J.; Leok, M. A novel formulation of point vortex dynamics on the sphere: Geometrical and numerical aspects. J. Nonlinear Sci. 2014, 24, 1–37. [Google Scholar] [CrossRef]
- Hairer, E.; Söderlind, G. Explicit, time reversible, adaptive step size control. SIAM J. Sci. Comput. 2005, 26, 1838–1851. [Google Scholar] [CrossRef]
- Benito, R.; Martín de Diego, D. Discrete vakonomic mechanics. J. Math. Phys. 2005, 46, 083521. [Google Scholar] [CrossRef]
- García, P.L.; Fernández, A.; Rodrigo, C. Variational integrators in discrete vakonomic mechanics. Rev. Real Acad. Cienc. Exactas Fis. Nat. Ser. A Mat. 2012, 106, 137–159. [Google Scholar] [CrossRef]
- Colombo, L.; Martín de Diego, D.; Zuccalli, M. Higher-order discrete variational problems with constraints. J. Math. Phys. 2013, 54, 093507. [Google Scholar] [CrossRef] [Green Version]















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tyranowski, T.M.; Desbrun, M. R-Adaptive Multisymplectic and Variational Integrators. Mathematics 2019, 7, 642. https://doi.org/10.3390/math7070642
Tyranowski TM, Desbrun M. R-Adaptive Multisymplectic and Variational Integrators. Mathematics. 2019; 7(7):642. https://doi.org/10.3390/math7070642
Chicago/Turabian StyleTyranowski, Tomasz M., and Mathieu Desbrun. 2019. "R-Adaptive Multisymplectic and Variational Integrators" Mathematics 7, no. 7: 642. https://doi.org/10.3390/math7070642
APA StyleTyranowski, T. M., & Desbrun, M. (2019). R-Adaptive Multisymplectic and Variational Integrators. Mathematics, 7(7), 642. https://doi.org/10.3390/math7070642