A General Algorithm for the Split Common Fixed Point Problem with Its Applications to Signal Processing

 ,
,  ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
| Algorithm 1: Cui and Wang’s algorithm |
| Input: Set , where . Choose . 1 for do 2 Update via (8), 3 end for |
| Algorithm 2: Boikanyo’s algorithm |
| Input: Set where , and such that and . Choose . 1 for do 2 Update via (9). 3 end for |
| Algorithm 3: Algorithm of Huimin et al. [16] |
| Input: Set , where , and such that and . Choose . 1 for do 2 Update via (10). 3 end for |
| Algorithm 4: Our algorithm |
| Input: Set where such that , and . Choose ; 1 for each do; 2 Update and via (11), respectively. 3 end for |
2. Preliminaries
- 1.
- Nonexpansive if
- 2.
- Contractive if there exists such that
- 3.
- Quasi-nonexpansive if
- 4.
- Directed if
- 5.
- τ-demicontractive with if
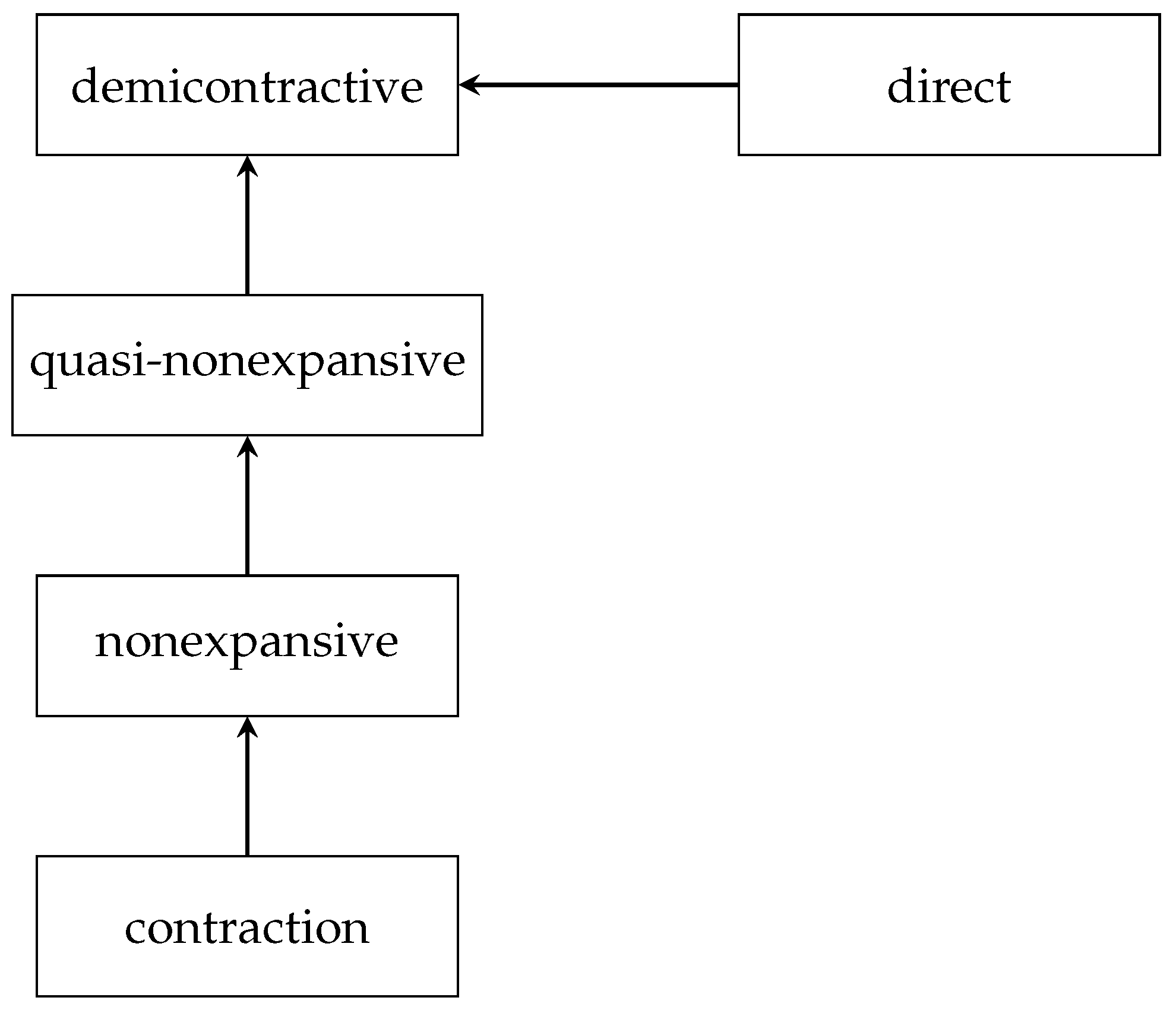
- 1.
- Every contraction operator is nonexpansive;
- 2.
- Every nonexpansive operator is quasi-nonexpansive;
- 3.
- Every quasi-nonexpansive operator is 0-demicontractive operator;
- 4.
- Every direct operator is -demicontractive operator.
- 1.
- ;
- 2.
- or .
- 1.
- if and only if for all ;
- 2.
- In particular, for all ,where , and
3. Main Results
4. Special Cases
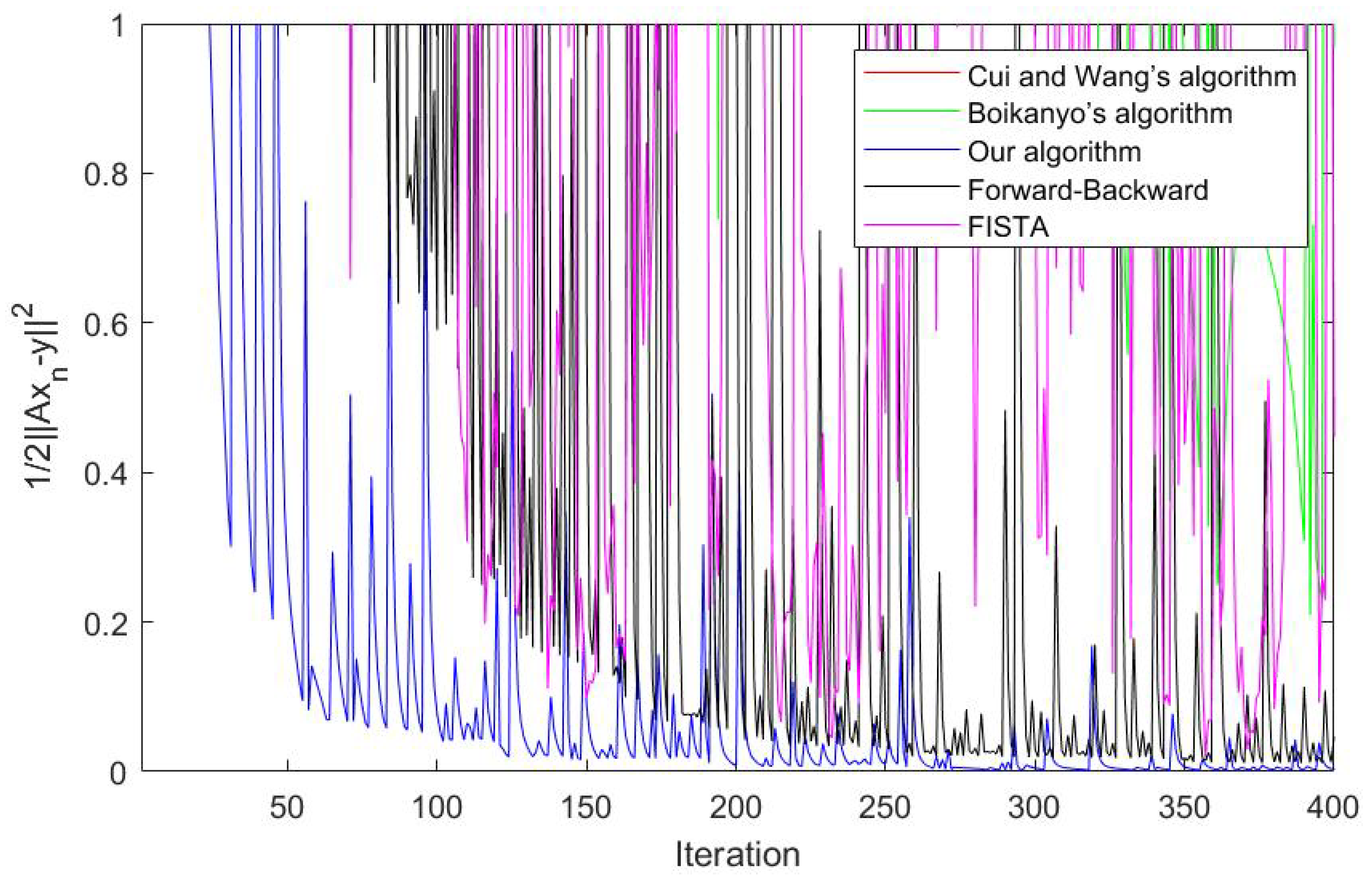
5. Application to Signal Processing
| Algorithm 5: A General Viscosity Algorithms (Our Algorithm) |
| Input: Set such that Choose . 1 for do 2 if , then 3 4 else 5 6 end 7 8 9 end for |
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Censor, Y.; Elfving, T. A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 1994, 8, 221–239. [Google Scholar] [CrossRef]
- Byrne, C. Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 2002, 18, 441. [Google Scholar] [CrossRef]
- Padcharoen, A.; Kumam, P.; Cho, Y.J. Split common fixed point problems for demicontractive operators. Numer. Algorithms 2018. [Google Scholar] [CrossRef]
- Ansari, Q.H.; Rehan, A.; Yao, J.C. Split feasibility and fixed point problems for asymptotically k-strict pseudo-contractive mappings in intermediate sense. Fixed Point Theory 2017, 18, 57–68. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Borwein, J.M. On projection algorithms for solving convex feasibility problems. SIAM Rev. 1996, 38, 367–426. [Google Scholar] [CrossRef]
- Stark, H. (Ed.) Image Recovery: Theory and Application; Academic Press, Inc.: Orlando, FL, USA, 1987; pp. 1–543. [Google Scholar]
- Ceng, L.C.; Ansari, Q.H.; Yao, J.C. Relaxed extragradient methods for finding minimum-norm solutions of the split feasibility problem. Nonlinear Anal. 2012, 75, 2116–2125. [Google Scholar] [CrossRef]
- Censor, Y.; Bortfeld, T.; Martin, B.; Trofimov, A. A unified approach for inversion problems in intensity-modulated radiation therapy. Phys. Med. Biol. 2006, 51, 2353–2365. [Google Scholar] [CrossRef]
- Byrne, C. A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 2004, 20, 103. [Google Scholar] [CrossRef]
- Censor, Y.; Segal, A. The split common fixed point problem for directed operators. J. Convex Anal. 2009, 16, 587–600. [Google Scholar]
- Moudafi, A. A note on the split common fixed-point problem for quasi-nonexpansive operators. Nonlinear Anal. 2011, 74, 4083–4087. [Google Scholar] [CrossRef]
- Wang, F.; Xu, H.K. Cyclic algorithms for split feasibility problems in Hilbert spaces. Nonlinear Anal. Theory Methods Appl. 2011, 74, 4105–4111. [Google Scholar] [CrossRef]
- Moudafi, A. The split common fixed-point problem for demicontractive mappings. Inverse Probl. 2010, 26, 055007. [Google Scholar] [CrossRef] [PubMed]
- Cui, H.; Wang, F. Iterative methods for the split common fixed point problem in Hilbert spaces. Fixed Point Theory Appl. 2014, 2014, 78. [Google Scholar] [CrossRef]
- Boikanyo, O.A. A strongly convergent algorithm for the split common fixed point problem. Appl. Math. Comput. 2015, 265, 844–853. [Google Scholar] [CrossRef]
- He, H.; Liu, S.; Chen, R.; Wang, X. Strong convergence results for the split common fixed point problem. AIP Conf. Proc. 2016, 1750, 050016. [Google Scholar] [CrossRef]
- Goebel, K.; Kirk, W. Topics in Metric Fixed Point Theory; Cambridge University Press: Cambridge, UK, 1990; Volume 28. [Google Scholar]
- Takahashi, W. Nonlinear Functional Analysis. Fixed Point Theory and Its Applications; Yokohama Publishers: Yokohama, Japan, 2000. [Google Scholar]
- Xu, H. An Iterative Approach to Quadratic Optimization. J. Optim. Theory Appl. 2003, 116, 659–678. [Google Scholar] [CrossRef]
- Mainge, P.E. Strong Convergence of Projected Subgradient Methods for Nonsmooth and Nonstrictly Convex Minimization. Set-Valued Anal. 2008, 16, 899–912. [Google Scholar] [CrossRef]
- Cui, H.; Ceng, L. Iterative solutions of the split common fixed point problem for strictly pseudo-contractive mappings. J. Fixed Point Theory Appl. 2018, 20, 92. [Google Scholar] [CrossRef]
- Duchi, J.; Shalev-Shwartz, S.; Singer, Y.; Chandra, T. Efficient Projections Onto the ℓ1-ball for Learning in High Dimensions. In Proceedings of the 25th International Conference on Machine Learning, Helsinki, Finland, 5–9 July 2008; ACM: New York, NY, USA, 2008; pp. 272–279. [Google Scholar]
- Wang, F. A new iterative method for the split common fixed point problem in Hilbert spaces. Optimization 2017, 66, 407–415. [Google Scholar] [CrossRef]
- Nesterov, Y. Gradient Methods for Minimizing Composite Objective Function; CORE Discussion Papers 2007076; Université Catholique de Louvain, Center for Operations Research and Econometrics (CORE): Louvain-la-Neuve, Belgium, 2007. [Google Scholar]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]





© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jirakitpuwapat, W.; Kumam, P.; Cho, Y.J.; Sitthithakerngkiet, K. A General Algorithm for the Split Common Fixed Point Problem with Its Applications to Signal Processing. Mathematics 2019, 7, 226. https://doi.org/10.3390/math7030226
Jirakitpuwapat W, Kumam P, Cho YJ, Sitthithakerngkiet K. A General Algorithm for the Split Common Fixed Point Problem with Its Applications to Signal Processing. Mathematics. 2019; 7(3):226. https://doi.org/10.3390/math7030226
Chicago/Turabian StyleJirakitpuwapat, Wachirapong, Poom Kumam, Yeol Je Cho, and Kanokwan Sitthithakerngkiet. 2019. "A General Algorithm for the Split Common Fixed Point Problem with Its Applications to Signal Processing" Mathematics 7, no. 3: 226. https://doi.org/10.3390/math7030226
APA StyleJirakitpuwapat, W., Kumam, P., Cho, Y. J., & Sitthithakerngkiet, K. (2019). A General Algorithm for the Split Common Fixed Point Problem with Its Applications to Signal Processing. Mathematics, 7(3), 226. https://doi.org/10.3390/math7030226