Abstract
In 2014, Cui and Wang constructed an algorithm for demicontractive operators and proved some weak convergence theorems of their proposed algorithm to show the existence of solutions for the split common fixed point problem without using the operator norm. By Cui and Wang’s motivation, in 2015, Boikanyo constructed also a new algorithm for demicontractive operators and obtained some strong convergence theorems for this problem without using the operator norm. In this paper, we consider a viscosity iterative algorithm in Boikanyo’s algorithm to approximate to a solution of this problem and prove some strong convergence theorems of our proposed algorithm to a solution of this problem. Finally, we apply our main results to some applications, signal processing and others and compare our algorithm with five algorithms such as Cui and Wang’s algorithm, Boikanyo’s algorithm, forward-backward splitting algorithm and the fast iterative shrinkage-thresholding algorithm (FISTA).
Keywords:
split common fixed point problem; demicontractive operator; Cui and Wang’s algorithm; Boikanyo’s algorithm; strong convergence MSC:
47J25; 47J20; 49N45; 65J15
1. Introduction
Assume that C and Q are nonempty closed convex subsets of Hilbert spaces and , respectively. Assume that is a bounded linear operator with the adjoint .
In 1994, the split feasibility problem was proposed by Censor and Elfving [1] as follows:
It is interesting to note that, when taking and , the split feasibility problem reduces to the linear inverse problem:
The most popular ways for solving the linear inverse problem is to reformulate it as a least squares problem. Similarly, the split feasibility problem was solved by equivalently reformulating it as the convex optimization problem:
where is the projection operator on set Q defined by
In 2002, based on the reformulation (3), the so-called CQ algorithm was presented by Byrne. He solved this problem by using the algorithm: For an arbitrary ,
which converges to a solution of the convex optimization problem. Since the algorithm (4) requires the inverse matrix of A, it is disadvantage to calculate this algorithm. We note that solves the problem (2) is equivalent to the fixed point problem, that is, is a fixed point of T, where for any .
In 2002, Byrne [2] constructed the following algorithm (5), which does not compute the inverse matrix of A: For any , is generated by
where and L is the largest eigenvalue of .
Recently, the split feasibility problem has been apllied to approximation theory, signal processing, image recovery, control theory, biomedical engineering, geophysics and communications by many authors. Refer to the papers [3,4,5,6,7,8,9].
Especially, the split common fixed point problem is as follows:
where and are operators, and denote the fixed point sets of U and T, respectively. In 2009, this problem was proposed by Censor and Segal [10] and they constructed the following algorithm for solving the problem: For any , is generated by
This algorithm can be extended to many cases as follows:
- Quasi-nonexpansive operators by Moudafi [11];
- Finitely many directed operators by Wang and Xu [12];
The algorithm (7) needs to compute , which is not easily computed. In 2014, Cui and Wang [14] proposed the following Algorithm 1 without using the operator norm: For an initial ,
where
where U and T are demicontractive operators with constants and such that and are demiclosed at zero, respectively, denote for any and A is a bounded linear operator, and they proved that the algorithm (8) converges weakly to a solution of the problem (6) when a solution exists.
| Algorithm 1: Cui and Wang’s algorithm |
| Input: Set , where . Choose . 1 for do 2 Update via (8), 3 end for |
In 2015, Boikanyo [15] extended Cui and Wang’s results and proposed the following Algorithm 2 for demicontrative operators U and T with for any , which converges strongly to a solution of the problem (6) when a solution exists: For any ,
where
and is a sequence in such that
| Algorithm 2: Boikanyo’s algorithm |
| Input: Set where , and such that and . Choose . 1 for do 2 Update via (9). 3 end for |
In 2016, Huimin et al. [16] proposed the following Algorithm 3 for demicontrative operators U, T with for any , where , and f is a contraction operator on which converges strongly to a solution of the problem (6) when a solution exists:
where
and is a sequence in such that
| Algorithm 3: Algorithm of Huimin et al. [16] |
| Input: Set , where , and such that and . Choose . 1 for do 2 Update via (10). 3 end for |
In this paper, motivated by Boikanyo’s algorithm [15] and the algorithm of Huimin et al. [16], we will propose the following Algorithm 4 for demicontrative operators U and T with for any :
where
U and T are demicontrative operators such that and are demiclosed at zero, f is a contraction operator on and the sequences in are such that
and we prove that our algorithm generated by (11) converges strongly to a solution of the problem (6) when a solution exists. However, and converge to the same point because from the condition and .
| Algorithm 4: Our algorithm |
| Input: Set where such that , and . Choose ; 1 for each do; 2 Update and via (11), respectively. 3 end for |
Remark 1.
In fact, our algorithm was changed from the algorithm of Huimin et al. including the point u in Boikano’s algorithm to the viscosity term and linear convex combination. The algorithm of Huimin et al. is a special case of our algorithm when and is a constant sequence. The algorithm of Huimin et al. and our algorithm are different because they were generated the distinct terms . However, they converge strongly to a same solution of the split common fixed point problem.
2. Preliminaries
Let H be a real Hilbert space. Let denote that converges weakly to x and denote that converges strongly to x.
The following inequality holds:
Definition 1.
Let be an operator such that . Then T is said to be:
- 1.
- Nonexpansive if
- 2.
- Contractive if there exists such that
- 3.
- Quasi-nonexpansive if
- 4.
- Directed if
- 5.
- τ-demicontractive with if
Remark 2.
Easily, we obtain the following conclusions:
- 1.
- Every contraction operator is nonexpansive;
- 2.
- Every nonexpansive operator is quasi-nonexpansive;
- 3.
- Every quasi-nonexpansive operator is 0-demicontractive operator;
- 4.
- Every direct operator is -demicontractive operator.
Definition 2.
Assume that is an operator. Then is demiclosed at zero if, for any in H, and imply .
Remark 3.
Every nonexpansive operator is demiclosed at zero [17].
Definition 3.
Assume that C is a nonempty closed convex subset of H. The metric projection from H onto C is defined as follows: For all ,
Note that the metric projection is nonexpansive [17].
Lemma 1
([18]). Assume that C is a nonempty closed convex subset of H and is a nonexpansive operator from H onto C. For any , it satisfies the inequality:
Lemma 2
([19]). Assume that is a sequence of nonnegative numbers such that
where and such that
- 1.
- ;
- 2.
- or .
Then .
Lemma 3
([20]). Assume that is a τ-demicontractive operator with . Define for any . Then, for any and ,
Lemma 4
([14]). Assume that is a bounded linear operator. Assume that is a τ-demicontractive operator. If , then
- 1.
- if and only if for all ;
- 2.
- In particular, for all ,where , and
3. Main Results
Theorem 1.
Assume that and are real Hilbert spaces. Assume that and are a κ-demicontractive operator and a τ-demicontractive operator with constants and , respectively such that and are demiclosed at zero, respectively. Assume that is a bounded linear operator with the adjoint of A. Assume that f is a contraction operator with constant η. Assume that S is a set of all solution of the problem (6) such that . If , and , then the sequence generated by algorithm (11) converges strongly to a point , which is a solution of the following variational inequality:
Proof.
Let for each and let . Since and , we have . For the proof, we have the following four steps:
Step 1. Show that is bounded.
Case : Thus . By Lemma 3, we get
Case : By Lemmas 3 and 4, we get
Thus . Observe that
Thus is bounded. Moreover, , and are also bounded.
Step 2. Show that, if the subsequence of weakly converges to , then the subsequence of weakly converges to q. Now, we consider
Since and are bounded, weakly converges to q.
Step 3. Show that the inequality holds:
Case : By Lemma 3, we get
Case : By Lemmas 3 and 4, we get
Therefore, we have
Step 4. Show that for each . Let . In this step, we consider two cases.
Case 1. Assume that there is such that is decreasing for all . Since is monotonic and bounded, is convergent. First, we show that
There are two parts to show this.
Part 1. Let . Since and are bounded and Step 3, we get
where
and
Since is convergent and , we have . By since , we have
By the boundedness of , there is a subsequence of such that and
Since and the demiclosedness of at zero, we have . Since A is a bounded linear operator, A is continuous. Therefore, imply . Form and the demiclosedness of at zero, it follows that and so . By Step 2, it follows that
Part 2. Let . Since and are bounded, by Step 3, we get
where
and
Thus we obtain
and
Since is convergent and , we obtain
Moreover, we get . However, it follows that
Thus we have
By the boundedness of , there is a subsequence of such that . Since and , there is a subsequence of such that and
Since , by the demiclosedness of at zero, we have . Since A is a bounded linear operator, A is continuous. Therefore, imply . Form and the demiclosedness of at zero, we have and . By Step 2, it follow that
Second, we show that . There are two parts.
Part 1. If , then we get
Part 2. If , then we get
Therefore, we have .
Third, we show that . We get the inequality:
Now, we have
By Lemma 2, we have and so .
Case 2. Assume that there is not such that is decreasing for all . Thus there is a subsequence of such that for all .
First, we show that
There are two parts.
Part 1. Let . Since and are bounded, by Step 3, we get
where
and
Since , we have
Since , we have
By the boundedness of , there is a subsequence of such that and
Since and the demiclosedness of at zero, we have . Since A is a bounded linear operator, A is continuous. Therefore, imply . Form and the demiclosedness of at zero, we have and so . By Step 2, it follows that
Part 2. Let . Since and are bounded, by Step 3, we get
where
and
Then we obtain
and
Since , we obtain
Moreover, we get . However, we have
Thus we have
By the boundedness of , there is a subsequence of and . Since and , we have such that
Since , by the demiclosedness of at zero, we have . Since A is a bounded linear operator, A is continuous. Therefore, imply . Form and the demiclosedness of at zero, we have and so . By Step 2, it follows that
Second, we show that
There are two parts.
Part 1. If , then we compute
Part 2. If , then we compute
Therefore, we have
Third, we show that . From the inequality , we get
Observe that
Then we have
Therefore, since is bounded and , from , it follows that . This completes the proof. ☐
4. Special Cases
We consider some special cases of Theorem 1 based on some relations of directed operators, -demicontractive operators and quasi-nonexpansive operators. See Figure 1. For some details, see Remark 2. Therefore, the following results follows easily from Theorem 1:

Figure 1.
Diagram relations operator.
Case 1. Assume that is a quasi-nonexpansive operator such that is demiclosed at zero and is a quasi-nonexpansive operator such that is demiclosed at zero, respectively.
Corollary 1.
Assume that S is a set of all solutions of the problem (6) such that . Suppose that
Then the sequence generated by the algorithm (11) converges strongly to and, also, is a solution of the variational inequality (12).
Case 2. Assume that is a quasi-nonexpansive operator such that is demiclosed at zero and is a directed operator such that is demiclosed at zero, respectively.
Corollary 2.
Assume that S is a set of all solutions of the problem (6) such that . Suppose that
Then the sequence generated by the algorithm (11) converges strongly to and, also, is a solution of the variational inequality (12).
Case 3. Assume that is a directed operator such that is demiclosed at zero and is a quasi-nonexpansive operator such that is demiclosed at zero, respectively.
Corollary 3.
Assume that S is a set of all solutions of the problem (6) such that . Suppose that
Then the sequence generated by the algorithm (11) converges strongly to and, also, is a solution of the variational inequality (12).
Case 4. Assume that is a quasi-nonexpansive operator such that is demiclosed at zero and is a -demicontractive operator such that is demiclosed at zero, respectively.
Corollary 4.
Assume that S is a set of all solutions of the problem (6) such that . Suppose that
Then the sequence generated by the algorithm (11) converges strongly to and, also, is a solution of the variational inequality (12).
Case 5. Assume that is a -demicontractive operator such that is demiclosed at zero and is a quasi-nonexpansive operator such that is demiclosed at zero, respectively.
Corollary 5.
Assume that S is a set of all solutions of the problem (6) such that . Suppose that
Then the sequence generated by the algorithm (11) converges strongly to and, also, is a solution of the variational inequality (12).
Case 6. Assume that is a directed operator such that is demiclosed at zero and is a directed operator such that is demiclosed at zero, respectively.
Corollary 6.
Assume that S is a set of all solutions of the problem (6) such that . Suppose that
Then the sequence generated by the algorithm (11) converges strongly to and, also, is a solution of the variational inequality (12).
Case 7. Assume that is a directed operator such that is demiclosed at zero and is a -demicontractive operator such that is demiclosed at zero, respectively.
Corollary 7.
Assume that S is a set of all solutions of the problem (6) such that . Suppose that
Then the sequence generated by the algorithm (11) converges strongly to and, also, is a solution the variational inequality (12).
Case 8. Assume that is a -demicontractive operator such that is demiclosed at zero and is a directed operator such that is demiclosed at zero, respectively.
Corollary 8.
Assume that S is a set of all solutions of the problem (6) such that . Suppose that
Then the sequence generated by the algorithm (11) converges strongly to and, also, is a solution of the variational inequality (12).
5. Application to Signal Processing
For most of the contents in this section, we follow those of Cui and Ceng [21]. We consider some applications of our algorithm to inverse problems occurring from signal processing. For example, we consider the following equation:
where is recovered, is noisy observations, is a bounded linear observation operator. It determines a process with loss of information. For finding solutions of the linear inverse problems (13), a successful one of some models is the convex unconstrained minimization problem:
where and is the norm. It is well know that the problem (14) is equivalent to the constrained least squares problem:
where . The problem (15) is a particular case of the problem (1), where . Therefore, we can solve the problem by the proposed algorithm. In this case, is the projection onto the closed -ball in and , see [22,23]. Denoted for each , where . Then we have the following algorithm:
where
f is a contraction operator on C and the sequences in are such that
Theorem 2.
Then the sequence generated by the algorithm (16) converges strongly to a solution of the problem (15).
Example 1.
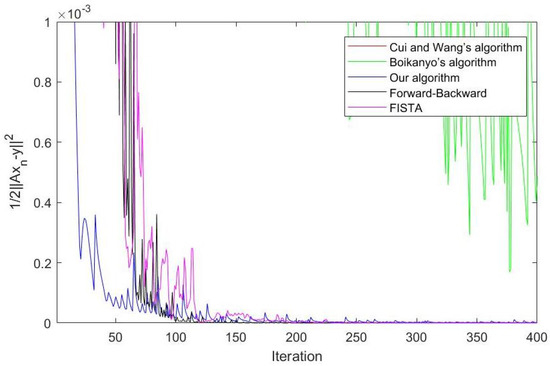
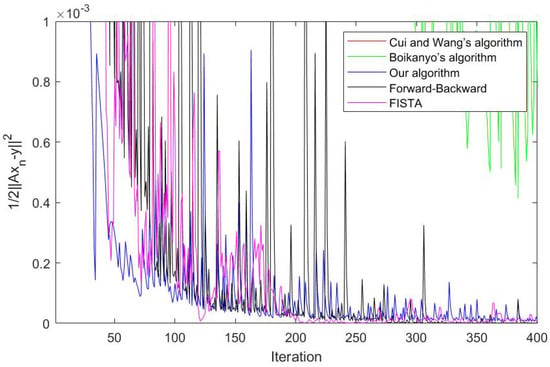
Let A be the random matrix such that each entire is in . Let be such that . Set up the problem (15). We choose , , , , and initial randomly be such that . Thus . See Figure 2 and Figure 3.
Figure 2.
Case and .
Figure 3.
Case and .
Remark 4.
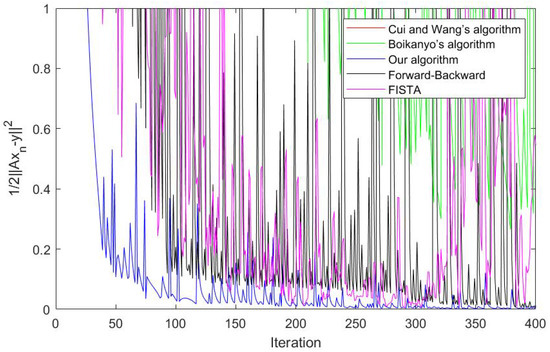

Figure 2, Figure 3, Figure 4 and Figure 5 show that the sequence improves the convergence profile of [14,15]. Our algorithm (Algorithm 5) converges faster than Cui and Wang’s algorithm and Boikanyo’s algorithm. Moreover, we compared our algorithm with the forward-backward splitting algorithm [24] and the fast iterative shrinkage-thresholding algorithm (FISTA) [25]. Sometimes, our algorithm converges faster than other algorithms, Figure 4 and Figure 5, but, sometimes, our algorithm converges slower than other algorithms, Figure 2 and Figure 3 . It depends on the control condition. This experiment is an example for the convergence of some algorithms.
Figure 4.
Case and .
Figure 5.
Case and .
| Algorithm 5: A General Viscosity Algorithms (Our Algorithm) |
| Input: Set such that Choose . 1 for do 2 if , then 3 4 else 5 6 end 7 8 9 end for |
6. Conclusions
First, we proposed a new algorithm for demicontractive operators and improved that the sequence generated by our algorithm strongly converges to a solution of the problem (6). Moreover, our algorithm does not compute the norm of the bounded linear operator. Next, we obtained some results for many cases of operators such as a directed operator, a quasi-nonexpansive operator, a nonexpansive operator and a contraction operator.
Author Contributions
All four authors contributed equally to work. All authors read and approved the final manuscript. P.K. conceived and designed the experiments. W.J. performed the experiments. W.J. and Y.J.C. analyzed the data. K.S. and W.J. wrote the paper. Authorship must be limited to those who have contributed substantially to the work reported.
Funding
Petchra Pra Jom Klao Ph.D. Research Scholarship (Grant No. 10/2560), TRF Research Scholar Award (Grant No. RSA6080047) and King Mongkut’s University of Technology North Bangkok (Grant No. KKMUTNB-62-KNOW-40).
Acknowledgments
The first author should like to thank the Petchra Pra Jom Klao Ph.D. Research Scholarship and the King Mongkut’s University of Technology Thonburi (KMUTT) for financial support. The authors acknowledge the financial support provided by King Mongkut’s University of Technology Thonburi through the “KMUTT 55th Anniversary Commemorative Fund”. This project Poom Kumam was partially supported by the Thailand Research Fund (TRF) and the King Mongkut’s University of Technology Thonburi (KMUTT) under the TRF Research Scholar Award (Grant No. RSA6080047). Moreover, this research was funded by the King Mongkut’s University of Technology North Bangkok, Contract no. KKMUTNB-62-KNOW-40.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Censor, Y.; Elfving, T. A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms 1994, 8, 221–239. [Google Scholar] [CrossRef]
- Byrne, C. Iterative oblique projection onto convex sets and the split feasibility problem. Inverse Probl. 2002, 18, 441. [Google Scholar] [CrossRef]
- Padcharoen, A.; Kumam, P.; Cho, Y.J. Split common fixed point problems for demicontractive operators. Numer. Algorithms 2018. [Google Scholar] [CrossRef]
- Ansari, Q.H.; Rehan, A.; Yao, J.C. Split feasibility and fixed point problems for asymptotically k-strict pseudo-contractive mappings in intermediate sense. Fixed Point Theory 2017, 18, 57–68. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Borwein, J.M. On projection algorithms for solving convex feasibility problems. SIAM Rev. 1996, 38, 367–426. [Google Scholar] [CrossRef]
- Stark, H. (Ed.) Image Recovery: Theory and Application; Academic Press, Inc.: Orlando, FL, USA, 1987; pp. 1–543. [Google Scholar]
- Ceng, L.C.; Ansari, Q.H.; Yao, J.C. Relaxed extragradient methods for finding minimum-norm solutions of the split feasibility problem. Nonlinear Anal. 2012, 75, 2116–2125. [Google Scholar] [CrossRef]
- Censor, Y.; Bortfeld, T.; Martin, B.; Trofimov, A. A unified approach for inversion problems in intensity-modulated radiation therapy. Phys. Med. Biol. 2006, 51, 2353–2365. [Google Scholar] [CrossRef]
- Byrne, C. A unified treatment of some iterative algorithms in signal processing and image reconstruction. Inverse Probl. 2004, 20, 103. [Google Scholar] [CrossRef]
- Censor, Y.; Segal, A. The split common fixed point problem for directed operators. J. Convex Anal. 2009, 16, 587–600. [Google Scholar]
- Moudafi, A. A note on the split common fixed-point problem for quasi-nonexpansive operators. Nonlinear Anal. 2011, 74, 4083–4087. [Google Scholar] [CrossRef]
- Wang, F.; Xu, H.K. Cyclic algorithms for split feasibility problems in Hilbert spaces. Nonlinear Anal. Theory Methods Appl. 2011, 74, 4105–4111. [Google Scholar] [CrossRef]
- Moudafi, A. The split common fixed-point problem for demicontractive mappings. Inverse Probl. 2010, 26, 055007. [Google Scholar] [CrossRef] [PubMed]
- Cui, H.; Wang, F. Iterative methods for the split common fixed point problem in Hilbert spaces. Fixed Point Theory Appl. 2014, 2014, 78. [Google Scholar] [CrossRef]
- Boikanyo, O.A. A strongly convergent algorithm for the split common fixed point problem. Appl. Math. Comput. 2015, 265, 844–853. [Google Scholar] [CrossRef]
- He, H.; Liu, S.; Chen, R.; Wang, X. Strong convergence results for the split common fixed point problem. AIP Conf. Proc. 2016, 1750, 050016. [Google Scholar] [CrossRef]
- Goebel, K.; Kirk, W. Topics in Metric Fixed Point Theory; Cambridge University Press: Cambridge, UK, 1990; Volume 28. [Google Scholar]
- Takahashi, W. Nonlinear Functional Analysis. Fixed Point Theory and Its Applications; Yokohama Publishers: Yokohama, Japan, 2000. [Google Scholar]
- Xu, H. An Iterative Approach to Quadratic Optimization. J. Optim. Theory Appl. 2003, 116, 659–678. [Google Scholar] [CrossRef]
- Mainge, P.E. Strong Convergence of Projected Subgradient Methods for Nonsmooth and Nonstrictly Convex Minimization. Set-Valued Anal. 2008, 16, 899–912. [Google Scholar] [CrossRef]
- Cui, H.; Ceng, L. Iterative solutions of the split common fixed point problem for strictly pseudo-contractive mappings. J. Fixed Point Theory Appl. 2018, 20, 92. [Google Scholar] [CrossRef]
- Duchi, J.; Shalev-Shwartz, S.; Singer, Y.; Chandra, T. Efficient Projections Onto the ℓ1-ball for Learning in High Dimensions. In Proceedings of the 25th International Conference on Machine Learning, Helsinki, Finland, 5–9 July 2008; ACM: New York, NY, USA, 2008; pp. 272–279. [Google Scholar]
- Wang, F. A new iterative method for the split common fixed point problem in Hilbert spaces. Optimization 2017, 66, 407–415. [Google Scholar] [CrossRef]
- Nesterov, Y. Gradient Methods for Minimizing Composite Objective Function; CORE Discussion Papers 2007076; Université Catholique de Louvain, Center for Operations Research and Econometrics (CORE): Louvain-la-Neuve, Belgium, 2007. [Google Scholar]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).