Search Acceleration of Evolutionary Multi-Objective Optimization Using an Estimated Convergence Point



Abstract
1. Introduction
2. Evolutionary Multi-Objective Optimization
2.1. Non-dominated Sorting Method
- Getting the first individual as a current individual;
- Comparing all objectives of the current individual with those of all other individuals;
- Counting the domination count , which means the number of individuals that dominant the current individual;
- Setting the individuals satisfy as the first front, and remove these individuals from the generation temporally;
- Repeating the above process until every individual is processed.
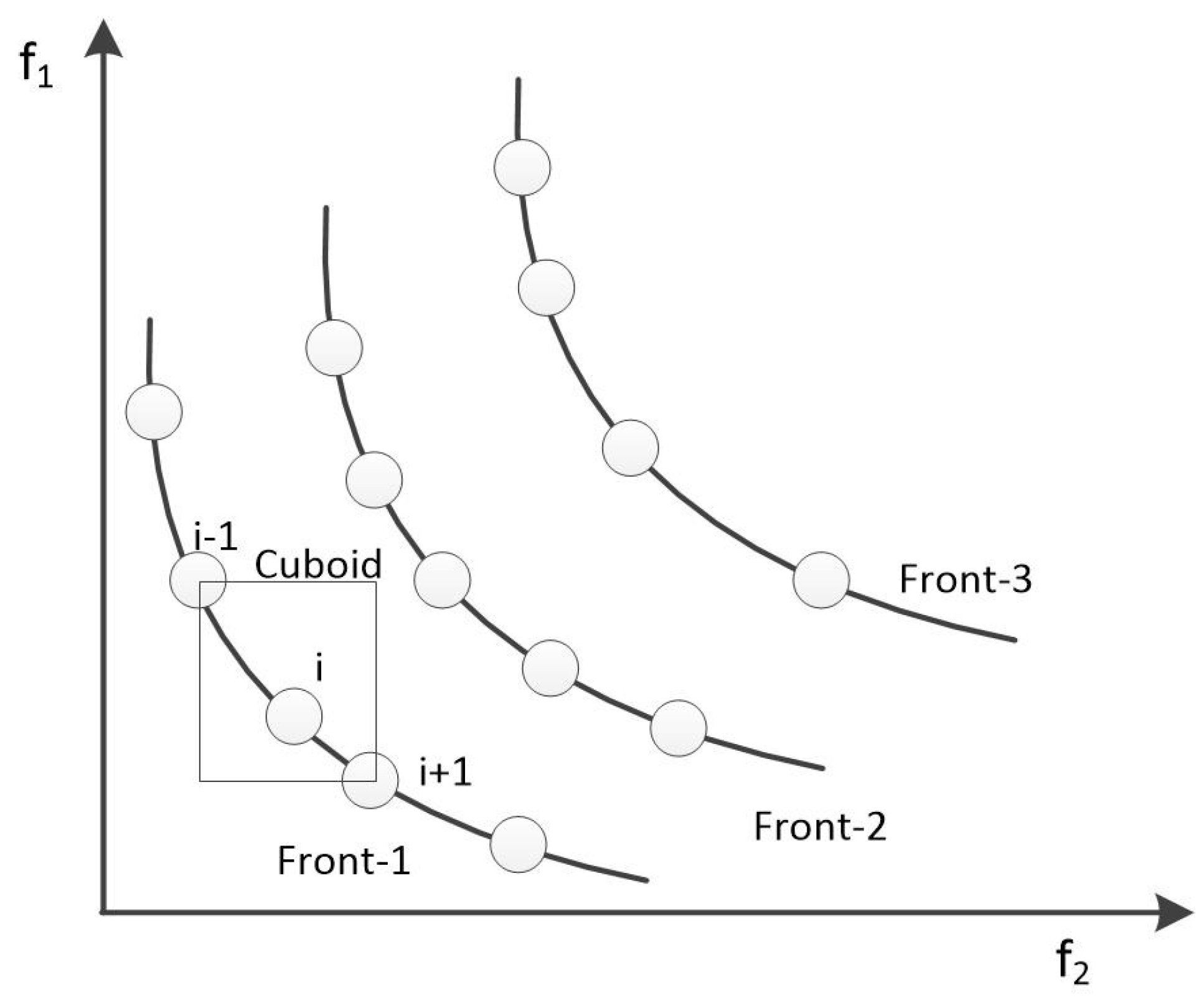
2.2. Crowding Distance Techniques
2.3. NSGA and Its Variants
3. Estimating a Convergence Point
3.1. Notation Definitions
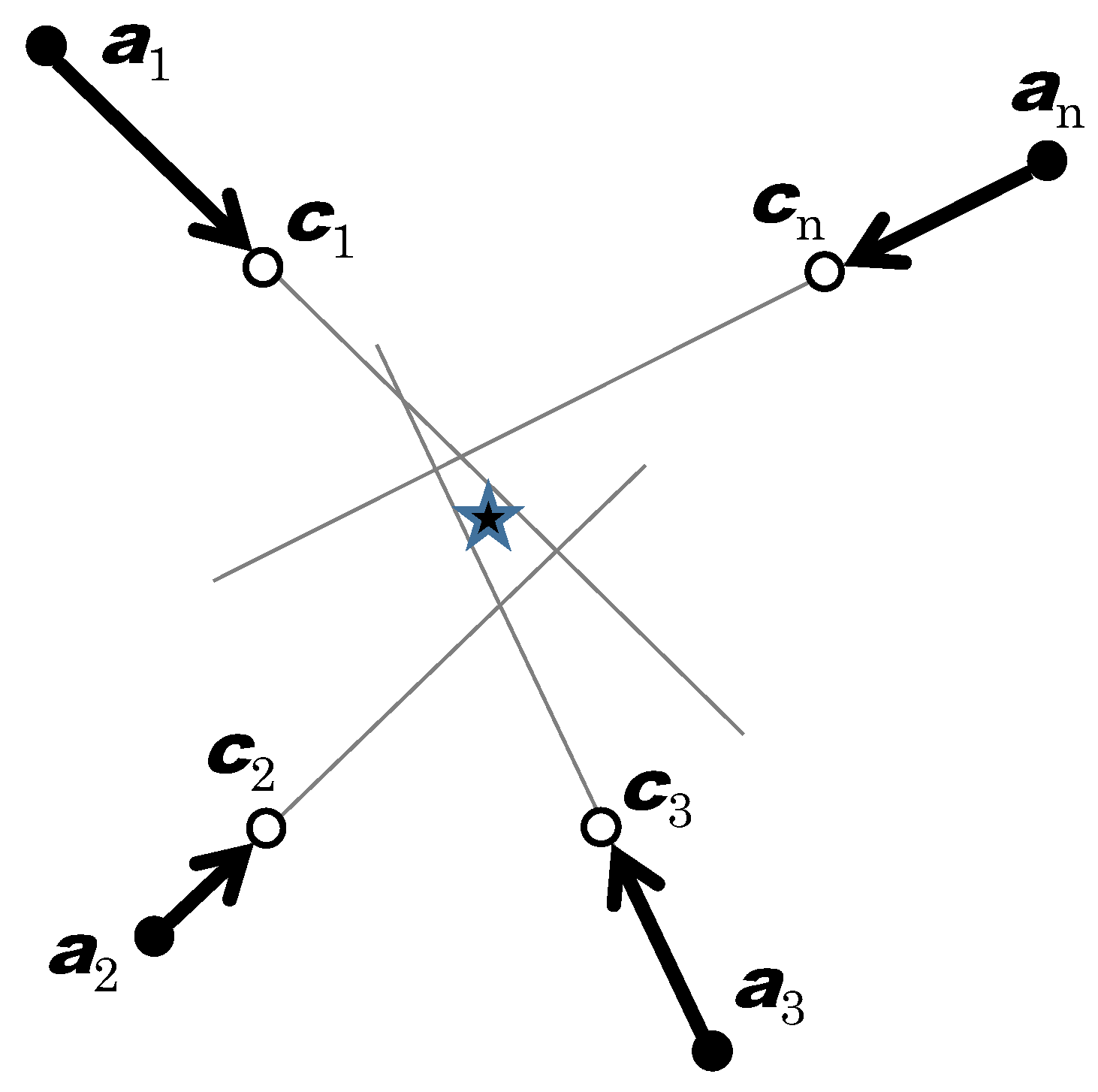
3.2. Estimation Method of a Point from Moving Vectors
4. Accelerating EMO Search Using an Estimated Convergence Point
4.1. Philosophy of the Proposal
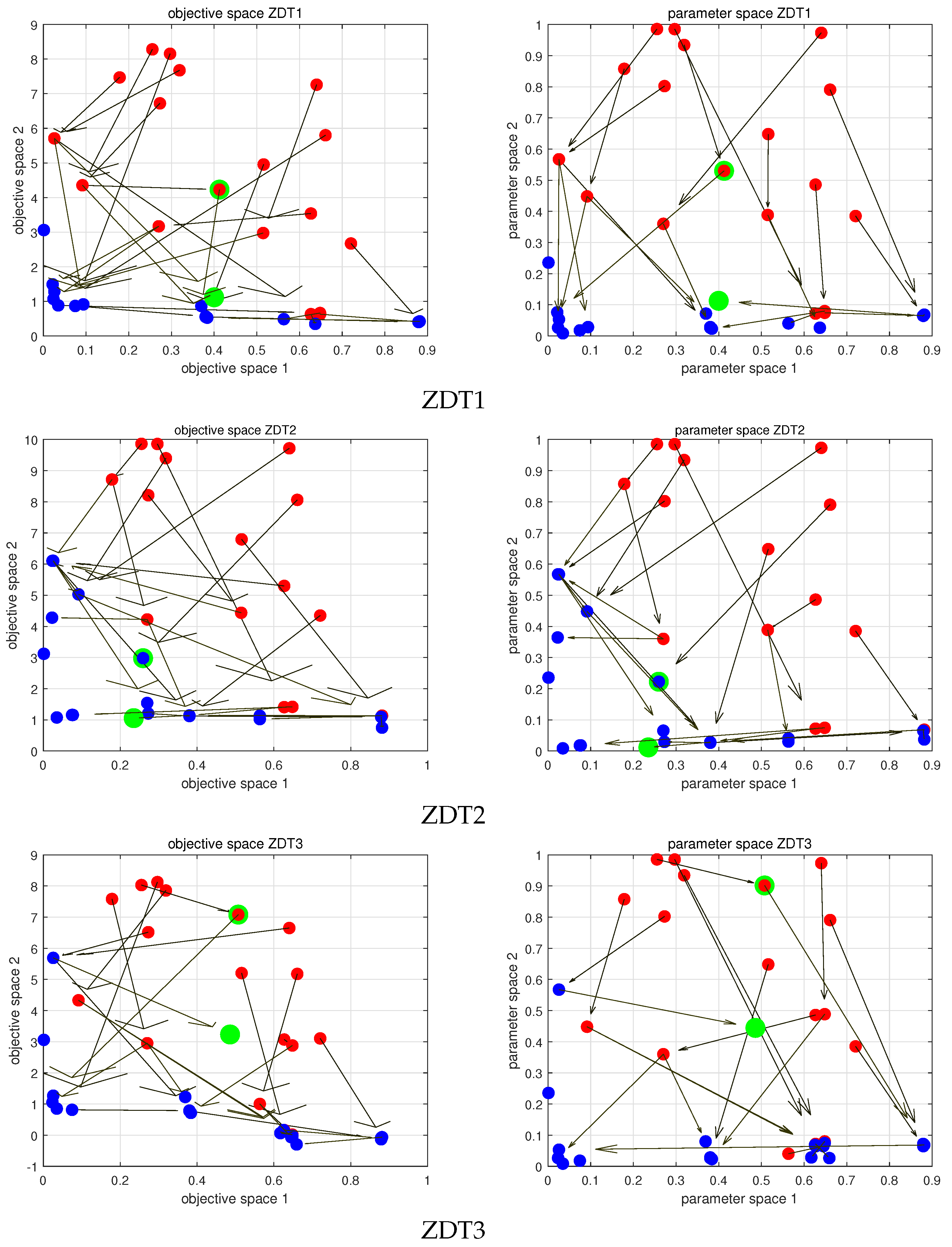
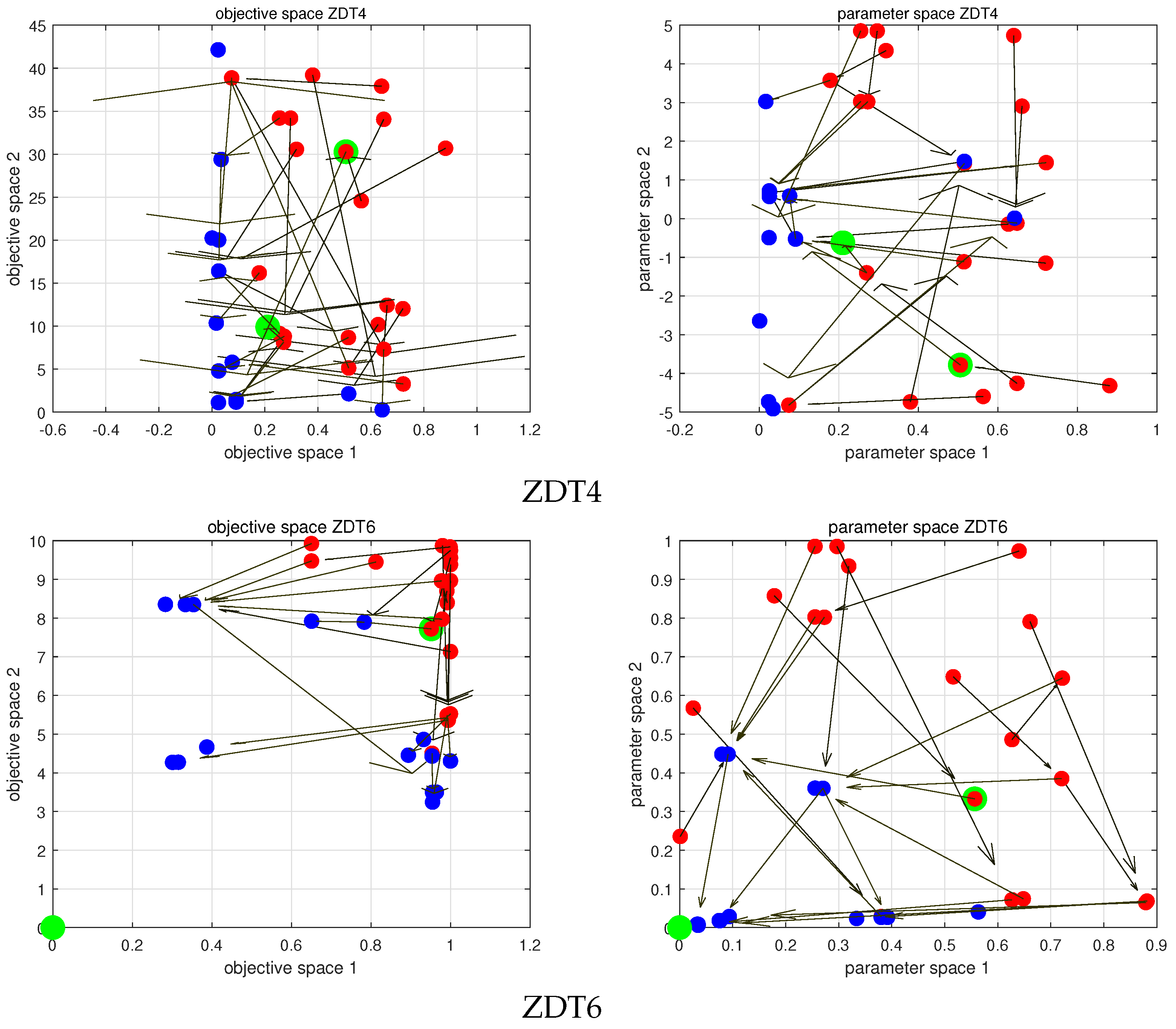
4.2. Estimation of Pareto Solution Frontier in a Parameter Space from Pareto Improvement Information in an Objective Space
- We pick up one of non-dominated solutions in an objective space from one group, and find the nearest non-dominated solution in the other group, and then find their corresponding individuals in a parameter space to make these two solutions form a pair. (Estimation in objective space)
- We pick up one of non-dominated solutions in an objective space from one group, and find its corresponding individual in a parameter space, and then find this individual’s nearest individual in a parameter space to make these two solutions form a pair. (Estimation in parameter space)
- Besides estimating only one estimated point, we can also estimate one point from only one single objective space each by each individually and use them together to accelerate EMO search (Estimation in each single objective space).
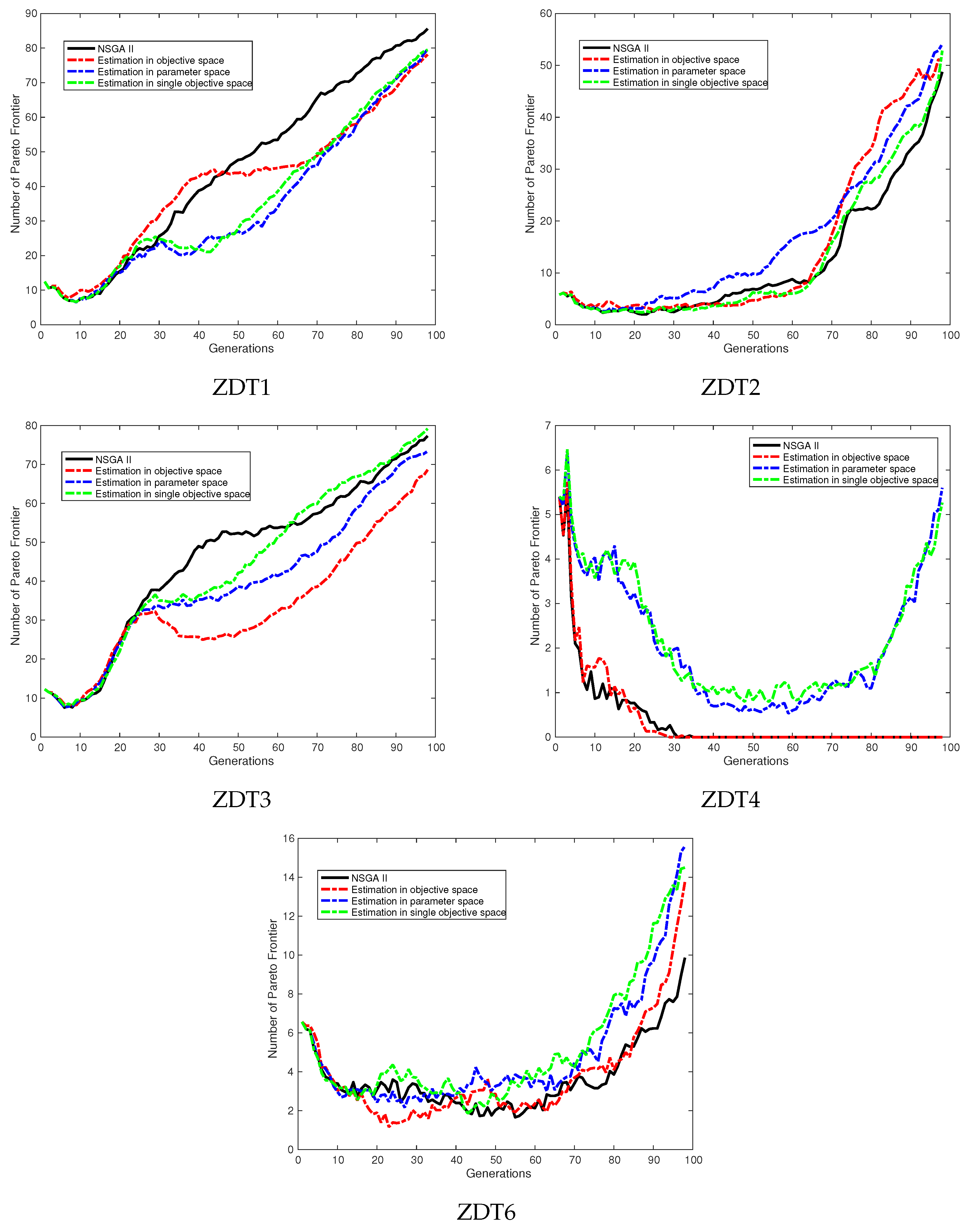
5. Experimental Evaluations
5.1. Experiment Setting
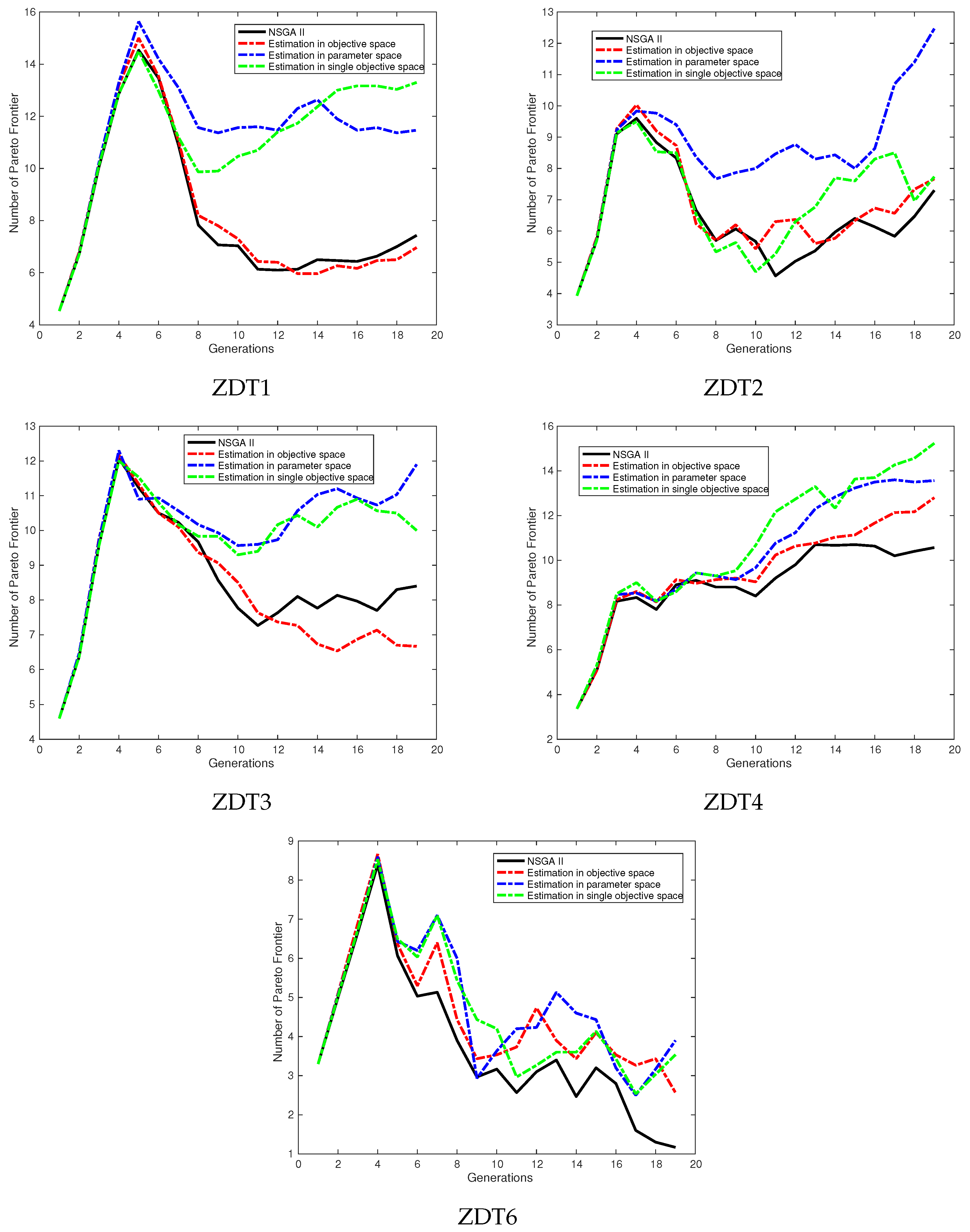
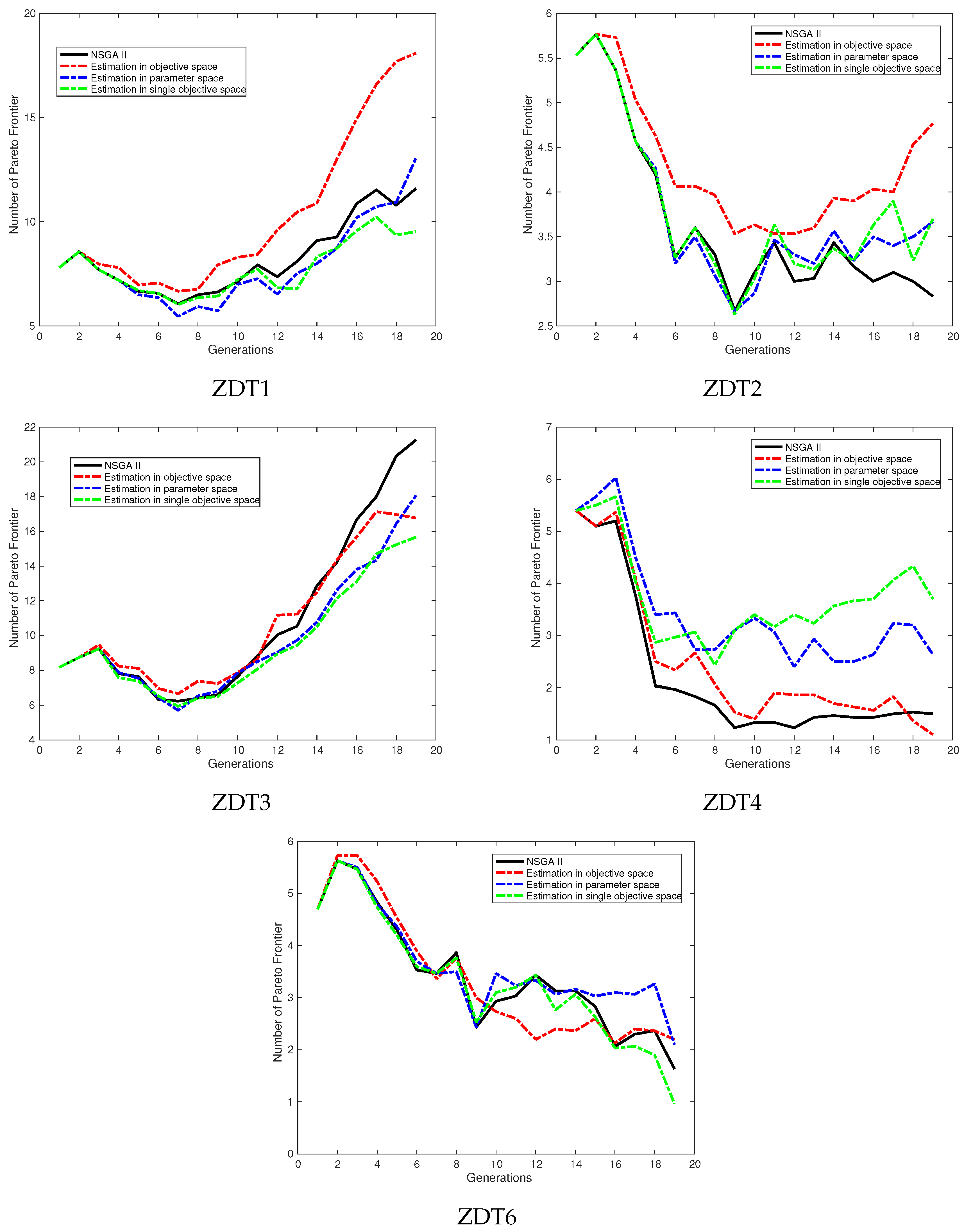
- NSGA-II; conventional NSGA-II algorithm;
- Estimation in objective space; we construct moving vectors from two subsequent non-dominated solution set in an objective space;
- Estimation in parameter space; we find the nearest offspring individual for each one in a parent generation, and make pairs in a parameter space; and
- Estimation in each single objective space; we consider each objective independently and estimation convergence point for each objective, where the estimated points may not be best on all objectives, but they have good potential in some objectives.
5.2. Evaluation Metrics
6. Discussions
6.1. Pareto Improvement of the Proposal
6.2. Topological Structure of Moving Vectors and Modality Characteristic of Pareto Improvement
7. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Li, B.; Li, J.; Tang, K.; Yao, X. Many-objective evolutionary algorithms: A survey. ACM Comput. Surv. 2015, 48, 13. [Google Scholar] [CrossRef]
- Jin, Y. A comprehensive survey of fitness approximation in evolutionary computation. Soft Comput. 2005, 9, 3–12. [Google Scholar] [CrossRef]
- Jin, Y.; Olhofer, M.; Sendhoff, B. A Framework for evolutionary optimization with approximate fitness functions. IEEE Trans. Evol. Comput. 2002, 6, 481–494. [Google Scholar]
- Jin, Y. Surrogate-assisted evolutionary computation: Recent advances and future challenges. Swarm Evol. Comput. 2011, 1, 61–70. [Google Scholar] [CrossRef]
- Witkin, A.P. Scale-space filtering. In Proceedings of the 8th International Joint Conference Artificial Intelligence, Karlsruhe, Germany, 8–12 August 1983; pp. 1019–1022. [Google Scholar]
- Takagi, H.; Ingu, T.; Ohnishi, K. Accelerating a GA convergence by fitting a single-peak function. J. Soft 2003, 15, 219–229. [Google Scholar] [CrossRef]
- Pei, Y.; Takagi, H. Accelerating IEC and EC searches with elite obtained by dimensionality reduction in regression spaces. Evol. Intell. 2013, 6, 27–40. [Google Scholar] [CrossRef]
- Pei, Y.; Zheng, S.; Tan, Y.; Takagi, H. Effectiveness of approximation strategy in surrogate-assisted fireworks algorithm. Int. J. Mach. Learn. Cybern. 2015, 6, 795–810. [Google Scholar] [CrossRef]
- Zhao, N.; Zhao, Y.; Fu, C. Genetic algorithm with fitness approximate mechanism. J. Natl. Univ. Def. Technol. 2014, 36, 116–121. [Google Scholar]
- Pei, Y.; Takagi, H. Fourier analysis of the fitness landscape for evolutionary search acceleration. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, Australia, 10–15 June 2012; pp. 1–7. [Google Scholar]
- Michael, D.S.; Hod, L. Coevolution of fitness predictors. IEEE Trans. Evol. Comput. 2008, 12, 736–749. [Google Scholar]
- Michael, D.S.; Hod, L. Co-evolution of fitness maximizers and fitness predictors. In Proceedings of the Genetic and Evolutionary Computation Conference, Washington, DC, USA, 25–29 June 2005; pp. 1–8. [Google Scholar]
- Michael, D.S.; Hod, L. Co-evolving fitness predictors for accelerating evaluations and reducing sampling. Genet. Programm. Theory Pract. IV 2006, 5, 113–130. [Google Scholar]
- Michael, D.S.; Hod, L. Predicting solution rank to improve performance. In Proceedings of the 12th Annual Genetic and Evolutionary Computation Conference, Portland, OR, USA, 7–11 July 2010; pp. 949–955. [Google Scholar]
- He, Y.; Yuen, S.Y.; Lou, Y. Exploratory landscape analysis using algorithm based sampling. In Proceedings of the 2018 Genetic and Evolutionary Computation Conference Companion, Kyoto, Japan, 15–19 July 2018; pp. 211–212. [Google Scholar]
- Mersmann, O.; Bischl, B.; Trautmann, H.; Preuss, M.; Weihs, C.; Rudolph, G. Exploratory landscape analysis. In Proceedings of the Genetic and Evolutionary Computation Conference, Dublin, Ireland, 12–16 July 2011; pp. 829–836. [Google Scholar]
- Wang, G.G.; Tan, Y. Improving metaheuristic algorithms with information feedback models. IEEE Trans. Cybern. 2017. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.G.; Guo, L.; Gandomi, A.H.; Hao, G.S.; Wang, H. Chaotic krill herd algorithm. Inf. Sci. 2014, 274, 17–34. [Google Scholar] [CrossRef]
- Pei, Y. Chaotic evolution: Fusion of chaotic ergodicity and evolutionary iteration for optimization. Nat. Comput. 2014, 13, 79–96. [Google Scholar] [CrossRef]
- Pei, Y.; Takagi, H. Research progress survey on interactive evolutionary computation. J. Ambient Intell. Hum. Comput. 2018, 1–14. [Google Scholar] [CrossRef]
- Pei, Y.; Takagi, H. A survey on accelerating evolutionary computation approaches. In Proceedings of the 2011 International Conference of Soft Computing and Pattern Recognition (SoCPaR), Dalian, China, 14–16 October 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 201–206. [Google Scholar]
- Murata, N.; Nishii, R.; Takagi, H.; Pei, Y. Analytical estimation of the convergence point of populations. In Proceedings of the 2015 IEEE Congress on Evolutionary Computation, Sendai, Japan, 25–28 May 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2619–2624. [Google Scholar]
- Yu, J.; Pei, Y.; Takagi, H. Accelerating evolutionary computation using estimated convergence points. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation, Vancouver, BC, Canada, 24–29 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1438–1444. [Google Scholar]
- Yu, J.; Takagi, H. Clustering of moving vectors for evolutionary computation. In Proceedings of the 2015 7th International Conference of Soft Computing and Pattern Recognition, Fukuoka, Japan, 13–15 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 169–174. [Google Scholar]
- Dantzig, G.B. Maximization of a Linear Function of Variables Subject to Linear Inequalities; John Wiley & Sons: New York, NY, USA, 1951. [Google Scholar]
- Wallis, J. A treatise of algebra, both historical and practical. Philos. Trans. 1685, 15, 1095–1106. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Srinvas, N.; Deb, K. Multi-objective function optimization using non-dominated sorting genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Deb, K.; Jain, H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, Part I: Solving Problems With Box Constraints. IEEE Trans. Evol. Comput. 2013, 18, 577–601. [Google Scholar] [CrossRef]
- Carlos, M.F.; Peter, F. Genetic algorithms for multiobjective optimization: Formulation discussion and generalization. In Proceedings of the 5th International Conference on Genetic Algorithms, Urbana, Champaign, IL, USA, 17–21 July 1993; pp. 416–423. [Google Scholar]
- Rey Horn, J.; Nafpliotis, N.; Goldberg, D.E. A niched Pareto genetic algorithm for multiobjective optimization. In Proceedings of the First IEEE Conference on Evolutionary Computation, Orlando, FL, USA, 27–29 June 1994; pp. 82–87. [Google Scholar]
- Zitzler, E.; Thiele, L. Multi-Objective evolutionary algorithms: A comparative case study and the strength Pareto approach. IEEE Trans. Evol. Comput. 1999, 3, 257–271. [Google Scholar] [CrossRef]
- Eckart, Z.; Marco, L.; Lothar, T. SPEA2: Improving the strength Pareto evolutionary algorithm. In Evolutionary Methods for Design, Optimization and Control with Applications to Industrial Problems, Proceedings of the EUROGEN2001 Conference, Athens, Greece, 19–21 September 2001; International Center for Numerical Methods in Engineering: Barcelona, Spain, 2001; pp. 95–100. [Google Scholar]
- David, W.C.; Joshua, D.K.; Martin, J.O. The Pareto-envelope based selection algorithm for multi-objective optimization. In Proceedings of the 6th International Conference on Parallel Problem Solving from Nature, Paris, France, 18–20 September 2000; pp. 839–848. [Google Scholar]
- Corne, D.W.; Jerram, N.R.; Knowles, J.D.; Oates, M.J.; J, M. PESA-II: Region-based selection in evolutionary multiobjective optimization. In Proceedings of the Genetic and Evolutionary Computation Conference, San Francisco, CA, USA, 7–11 July 2001; pp. 283–290. [Google Scholar]
- Pei, Y.; Hao, J. Non-dominated sorting and crowding distance based multi-objective chaotic evolution. In International Conference in Swarm Intelligence; Springer: Cham, Switzerland, 2017; pp. 15–22. [Google Scholar]
- Zitzler, E.; Deb, K.; Thiele, L. Comparison of multiobjective evolutionary algorithms: Empirical results. Evol. Comput. 2000, 8, 173–195. [Google Scholar] [CrossRef] [PubMed]
- Zitzler, E.; Brockhoff, D.; Thiele, L. The hypervolume indicator revisited: On the design of Pareto-compliant indicators via weighted integration. In Evolutionary Multi-Criterion Optimization; Springer: Berlin, Germany, 2007; pp. 862–876. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Functions | Definition |
|---|---|
| ZDT1 | |
| ZDT2 | |
| ZDT3 | |
| ZDT4 | |
| ZDT6 |
| population size for 2-D, 10-D, and 30-D | 20, 50, and 100 |
| crossover rate | 0.8 |
| mutation rate | 0.05 |
| max. # of fitness evaluations, , for 2-D, 10-D, and 30-D search | 400, 1000, and 10,000 |
| dimensions of benchmark functions, D | 2, 10, and 30 |
| # of trial runs | 30 |
| 2-D tasks | ||||
| Func. | NSGA-II | Estimation in Obj. | Estimation in Para. | Estimation in SinglePara. |
| ZDT1 | 0.414567 | 0.417300 | 0.453833 † | 0.480533 † |
| ZDT2 | 0.109833 | 0.117367 | 0.124367 | 0.113867 |
| ZDT3 | 0.556733 | 0.552433 | 0.622733 † | 0.622600 † |
| ZDT4 | 0.255733 | 0.261600 | 0.284933 † | 0.337167 † |
| ZDT6 | 0.000033 | 0.002033 | 0.001833 | 0.000967 |
| 10-D tasks | ||||
| Func. | NSGA-II | Estimation in Obj. | Estimation in Para | Estimation in SinglePara |
| ZDT1 | 0.328033 | 0.337767 | 0.345533 | 0.339433 |
| ZDT2 | 0.008633 | 0.012367 | 0.010100 | 0.008933 |
| ZDT3 | 0.564067 | 0.545767 | 0.589400 | 0.588933 |
| 30-D tasks | ||||
| Func. | NSGA-II | Estimation in Obj. | Estimation in Para | Estimation in SinglePara |
| ZDT1 | 0.647167 | 0.654000 | 0.651533 | 0.648633 |
| ZDT2 | 0.183333 | 0.157567 | 0.187700 | 0.190433 |
| ZDT3 | 0.796133 | 0.792600 | 0.791533 | 0.794767 |
| ZDT6 | 0.066233 | 0.068433 | 0.069633 | 0.066733 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pei, Y.; Yu, J.; Takagi, H. Search Acceleration of Evolutionary Multi-Objective Optimization Using an Estimated Convergence Point. Mathematics 2019, 7, 129. https://doi.org/10.3390/math7020129
Pei Y, Yu J, Takagi H. Search Acceleration of Evolutionary Multi-Objective Optimization Using an Estimated Convergence Point. Mathematics. 2019; 7(2):129. https://doi.org/10.3390/math7020129
Chicago/Turabian StylePei, Yan, Jun Yu, and Hideyuki Takagi. 2019. "Search Acceleration of Evolutionary Multi-Objective Optimization Using an Estimated Convergence Point" Mathematics 7, no. 2: 129. https://doi.org/10.3390/math7020129
APA StylePei, Y., Yu, J., & Takagi, H. (2019). Search Acceleration of Evolutionary Multi-Objective Optimization Using an Estimated Convergence Point. Mathematics, 7(2), 129. https://doi.org/10.3390/math7020129