1. Introduction
As well known, the PID controller is one of the popular control strategies and widely adopted to control engineering due to its simple structure and robust feature [
1,
2,
3]. Hence, the PID controller has been widely implemented in many industrial applications. For tuning the PID controller gains, the traditional method Ziegler–Nichols rule is developed, but it is difficult to adjust the optimal or near optimal PID controller gains when the controlled system is with nonlinearity and high order dimension [
3,
4]. Paper [
5] proposes the closed-loop controlled system by using a state-derivative feedback controller, and it illustrates the difficulty of calculating the controller based on the state-feedback control approach; hence, this paper transforms the single input single output (SISO) system into Frobenius canonical form and the pole-placement method is employed to cope with the state-derivative feedback control problem. Research work [
6] processes the state-derivative feedback controller design by transforming the state-derivative feedback control problem to state-feedback control problem, but the limitation is that the system matrix
is invertible. Recently, the linear matrix inequality (LMI) approach is adopted to achieve the PID controller design. For example, the work in [
7] deals with the PID controller design for the controlled system without a direct feed-through term and the output variable transformation method is adopted, but if the controlled system is with a direct feed-through term, the PID controller will become difficult to design. The authors of [
8] discussed the robust PID controller for the linear uncertain system by LMI and D-stability approach. The singular system structure is used to calculate the PD controller with the
performance [
9]; the
PD/PI controller design is presented in [
10]. Compared with the literature in [
9,
10], the proposed design algorithm of PID controller is without additional singular structure. However, this paper discusses the PID-type controller in detail. For instance, the D-type controller is discussed to be bounded by a selected parameter, and the parameter is bounded in a range (0, 1); hence, the D-type controller can avoid unreasonable gain value (large gain value) through a simple proposed method.
The Laplace transform method and the final-value theorem are employed to design the tracking controller [
11,
12]. To shape the tracking performance, the literature in [
13,
14] designed the augmented state for PID filter then the controlled system is transformed to the augmented controlled system with a direct feed-through term. Moreover, the disturbance observer and functional observer are developed to measure the external disturbance [
13,
14,
15]. However, the proposed design approaches [
13,
14] cannot be directly applied to the systems with a direct feed-through term and unknown nonlinear perturbation; hence, the PID controller is worth being developed, especially if the controlled system is with nonlinear perturbations and direct feed-through term. With the design of the PI-type controller, the controlled system has the augmented structure, and this structure may result in an uncontrollable augmented controlled system. In paper [
16], the authors present a method which is placed in the closed-loop system eigenvalues on the left of the negative vertical that lies by the selected non-positive constant; hence, the proposed method is utilized to overcome the uncontrollable issue in this paper. Since the forward gain cannot be designed by using the traditional LQAT approach due to the method in [
16], therefore, the final-value theorem can be adopted to overcome this problem by discussing the final-value theorem for the proposed robust tracker design in this paper.
SMC is inherently robust to external disturbance and nonlinear system and with fast response. In [
17], the adaptive robust PID controller with SMC is proposed for the uncertain chaotic system. In [
18], the fuzzy sliding mode control is designed for induction machine. The work in [
19] designs an adaptive integral SMC for the system with uncertainty and applies the controller to the vertical take-off and landing (VTOL) aircraft system. Therefore, the SMC can be successfully utilized in many applications. Suppressing disturbance is the main target of SMC, but it cannot eliminate disturbance completely. Some researches utilize the disturbance estimators to overcome external disturbance [
20,
21]; the papers develop SMC to integrate with the disturbance estimator for the controlled system with undesired disturbance [
22,
23,
24,
25]. The authors of [
25] propose the observer-based SMC for the controlled system with external disturbances. A robust SMC and disturbance observer via the augmented state for the multi-axis coordinated motion system is studied [
26]. However, in our knowledge, the SMC-based LQAT integrated with PID controller has not been well discussed, especially if the controlled system is with a direct feed-through term. To deal with the external perturbation, this paper develops the perturbation estimator design based on the SMC due to its fast response.
The three PID controller gains must be determined properly; otherwise, it might result in undesirable performance. In the works of [
27,
28], the authors developed an optimization method for the PID controller design subjected to the expected performance index though the frequency response. In the work of [
29], the authors proposed a methodology for designing the controller and the loop shaping with the standard performance such as
and
performance. However, these proposed methodologies do not take the disturbance estimator into account [
27,
28,
29]. To improve the tracking performance and control force, the disturbance estimator is adopted to the proposed controller. Recently, many popular heuristic algorithms have been applied in optimization problems. Particle swarm optimization (PSO) [
3,
4,
30], DNA algorithm [
31,
32], and genetic algorithm (GA) [
33,
34,
35,
36,
37,
38] are stochastic searching methods for solving optimal problems. For example, some works in [
33,
34,
35,
36,
37,
38] based on the GA method integrated their research to the proposed controller and parameters optimization; in papers [
31,
32], the DNA algorithm is proposed for the PID controller optimization, and the difference between GA and DNA algorithms is the mutation operator which is not only with the same mutation operator but also consists of enzyme and virus, whereby the different PID structure can exchange their information. On the other hand, the Taguchi method is a low cost and high effective method for quality engineering [
39,
40]. Compared with full factorial experiments, the Taguchi method is a simple experimental design method that is less experiment. It emphasizes and focuses on the improvement of product quality not through testing but through design. Some papers apply the Taguchi method to improve the performance of GA [
33,
34]. Paper [
33] mentions that the hybrid Taguchi–genetic algorithm (HTGA) has a quick convergent. Among the above methods, the DNA algorithm is a multiple functional method which is not only adjusted to the parameters but also changed the PID structure to find the optimal or near-optimal solution. Thus, this paper utilizes the advantage of Taguchi method to enhance the efficiency for our proposed algorithm.
Based on the above description, this paper aims to design a robust LQAT consisting of PID controller, SMC, and perturbation estimator for a class of nonlinear systems with unknown nonlinear perturbation, and the proposed HTRDNA algorithm is designed for the PID controller optimization. To avoid unreasonable gain value in the controller, a simple algorithm for D-type controller design is studied. Due to the SMC fast response, the perturbation estimator is proposed based on SMC. Since the undesirable nonlinear perturbation is eliminated by the SMC-based perturbation estimator first, it becomes easy to optimize the PID controller with the new design procedure of HTRDNA algorithm proposed in this paper.
This paper is organized as follows.
Section 2 presents the whole derivation for the robust tracker design.
Section 3 proposes the design procedure of HTRDNA algorithm. The illustrative examples demonstrate the feasibility and validity of the proposed approaches in
Section 4 and a conclusion is given in
Section 5.
Notations: is used to denote the transpose for the matrix , denotes the matrix generalized inverse for the matrix and denotes the Euclidean norm of the matrix or vector . represents the absolute value of . is the identity matrix. is the function of , if , ; if , ; if , .
2. Robust Tracker and Perturbation Estimator Design
For a class of nonlinear systems with a direct feed-through term, the robust tracker and perturbation estimator are proposed. In real engineering systems, there are many controlled systems with nonlinear vector and disturbances such as the chaotic systems and robotic systems. To cope with these undesired perturbations, the SMC-based perturbation estimator is proposed. Now, consider a class of nonlinear time-invariant system described by
where
,
,
, and
denote the system matrices. The pair
is controllable. In order to deal with the LQAT problem, the condition
has to satisfy.
is the state vector,
is the control input,
is the system nonlinear vector, and
is the measurable output of the system.
is the unknown nonlinear perturbation at time
. Notices that the proposed approach still works for the special case where
(such as chaotic systems). Moreover,
where the gain
is D-type controller gain.
In [
5,
8], the closed-loop controlled system of D-type controller is discussed. Therefore, the linear transformation can be founded. To merge the derivative term
in (1), theoretically it can be written to
After being transformed, (1) can be rewritten to the following state space equation
where
,
, and
.
To avoid the D-type controller
with unreasonable values, the gain should be discussed and selected properly. In order to keep the original system feature, let the matrix
be
where parameter
is positive definite so that the transformed system can remain its stability. Therefore, a simple D-type controller algorithm is proposed. Since the rank of
is
so that
only
poles can be placed, some methods can be utilized to deal with this problem such as pole-placement and LMI approach. To implement minimal parameters, one solution of
can be obtained by
then, the matrix
is equivalent to
which implies
To find out the range of
, we take 2 norm for both sides of (8)
and the parameter
has the range
. Moreover, for the requirement of the transformed matrix
being invertible. In (7)–(9), we assume that the rank of
is
, and
is positive definite so that
should be a reasonable matrix with
. From Equation (9), the system matrix
and
can be described in the singular value decomposition (SVD) form as
where
is a unitary matrix,
is the matrix with
singular values, and
is a unitary matrix. One has
For the above calculation, the inverse of matrix exists, thus, we can ensure that the transformed matrix is invertible for the linear transformation in our proposed method.
Remark 1. If the D-type controller (6) satisfies the above design algorithm, then invertible matrix can be computed. Since the D-type controller is sensitive to the system states varying, the gain should be selected properly. If the gain is with the high gain property, then the and gains (to be appear later) will be unreasonable large. Therefore, a simple D-type controller algorithm is important.
To construct an augmented matrix with PI-type controller. Let
to be the new state variable in the modified state space equation, where
denotes the tracking error and
is the reference trajectory. In light of the new state variable, the system in (4) and (5) can be arranged to the new state-space equation described as
where
and
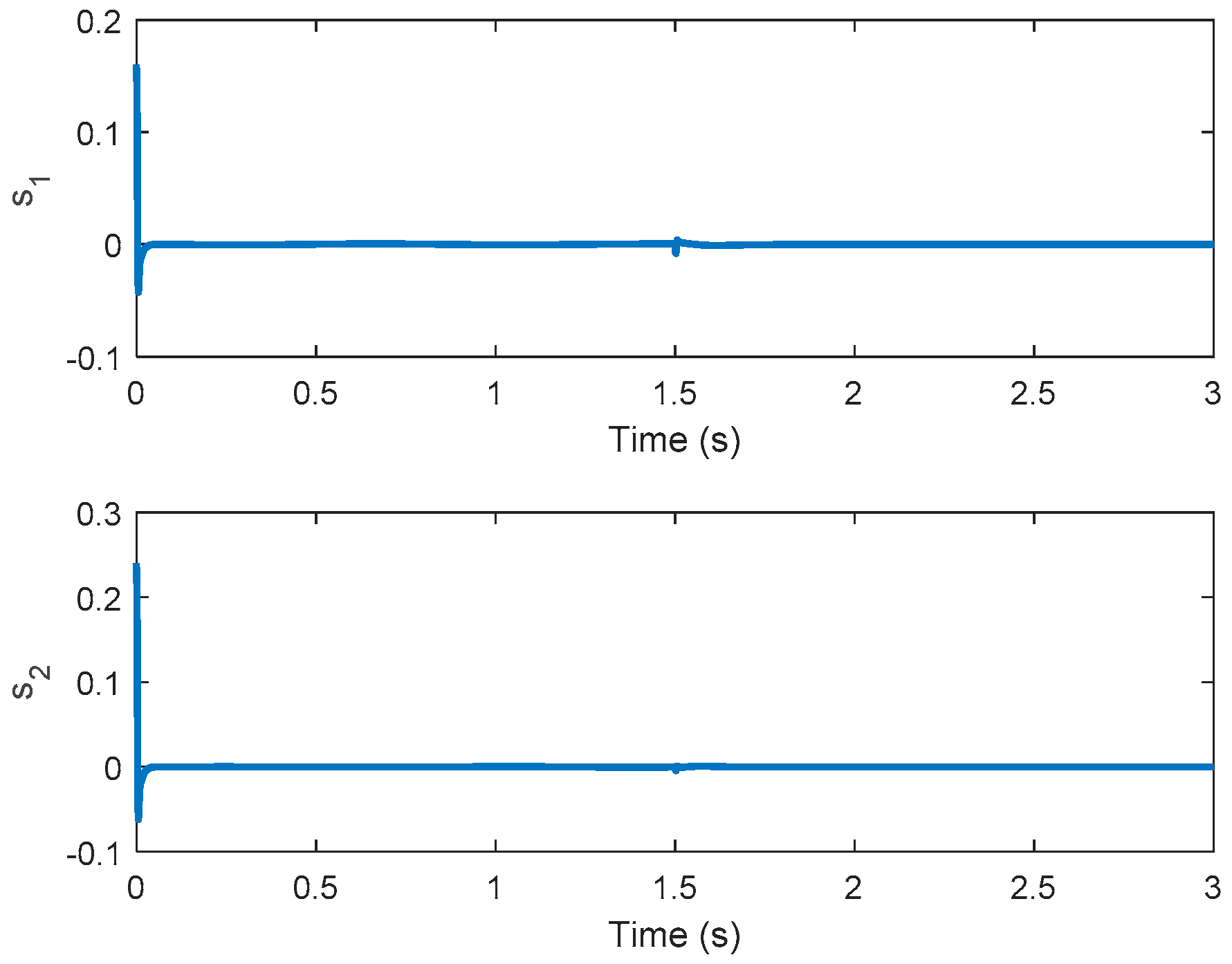
We give a sliding surface as
where
the equivalent control
in the sliding manifold
is obtained by
We lack of the information of perturbation ; hence, the underdetermined estimation of named by will be design first, then the PI-type controller gain and control law will be discussed in detail later, respectively.
Lemma 1. In the works [15,21], the authors indicate that the perturbation is assumed to be slowly time-varying; therefore, the derivative of perturbation equal is (near) to zero. Generally, it is reasonable to suppose thatwhen the perturbation is slowly time-varying and changes slightly relative to the observer dynamics with high gain property. Give the perturbation estimator as
where
is the positive parameter for the perturbation estimator. In the control law (15), the nonlinear perturbation
is unknown so that the control law cannot be achieved. Therefore, the perturbation estimator (17) can be utilized to replace the unknown nonlinear perturbation
. Now, the SMC controller
and SMC-based control law can be designed by
where
and
denote arbitrary nonnegative value so that the trajectories of SMC converge to the sliding manifold and the unknown nonlinear perturbation is estimated consequently.
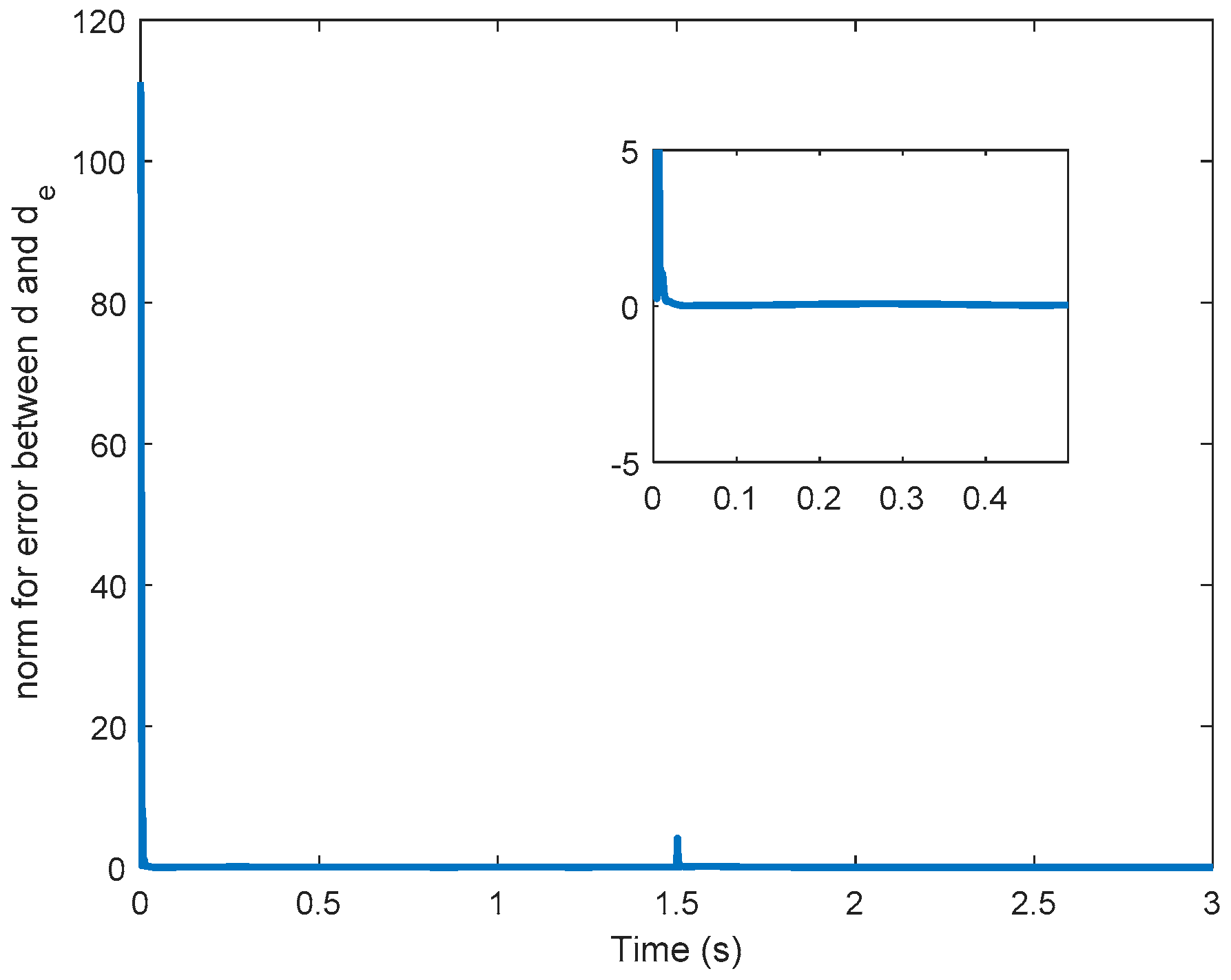
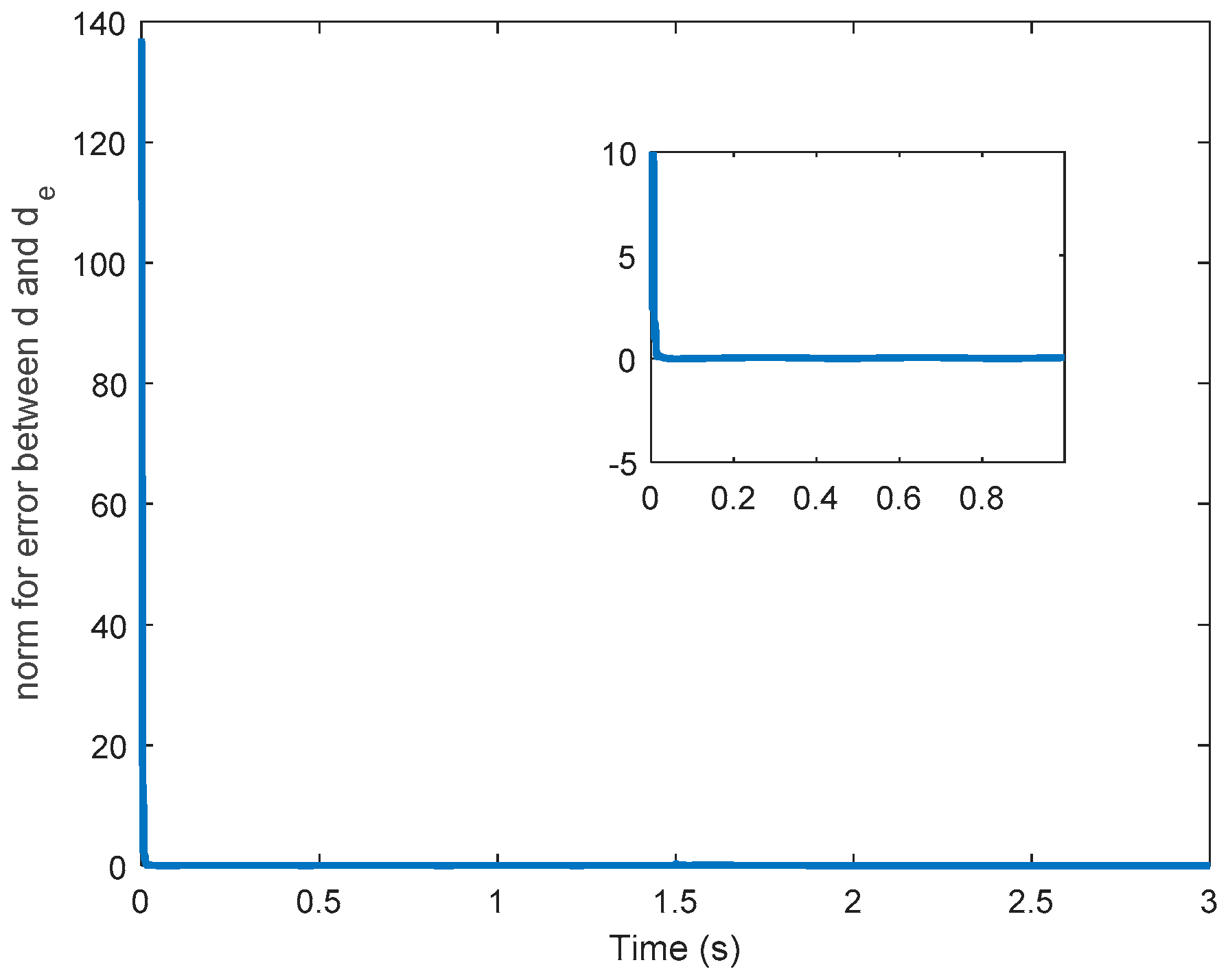
Theorem 1. The estimation in (17) leads to the error between the external perturbation and the estimated perturbation converge to zero closely, which implies Remark 2. To avoid the undesired chattering phenomenon in the SMC, the sign function can be replaced by a smooth and continuous saturation function [41].whereis an arbitrary small positive constant. Ifequals to zero, the saturation functionis equivalent to the sign function. While the controlled system with direct feed-though term, the undesired chattering phenomenon affects the controlled system output directly. Hence, the saturation function should be smooth enough; in other words, the parametershould be selected properly. Therefore, the undesired chattering phenomenon can be avoided, especially if the controlled system has direct feed-though term. According to Theorem 1, the sliding manifold is reached and substituting (19) and (20) into (11) and (12), one has
where
and
Lemma 2. [16] Letbe the pair of the given open-loop system andrepresent the prescribed degree of relative stability. The eigenvalues of the closed-loop systemlie on the left of thevertical line with the matrixbeing the solution of the Riccati equationwhere the matrixis an identity matrix. In order to track the reference trajectory, the linear quadratic method is applied to the tracker design. The PI controller gain
can be described as
where
,
, and
. To design the controller gain
consisting of
and
, we temporarily do not take the perturbation estimator
and the control law
into consideration in (22) and (23). Both the
and
will be discussed based on the final-value theorem in detail.
Let the quadratic performance index for the output tracking problem be defined as
where
denotes the final time, as well as
with
and
are the appropriate weighting matrices. Consider the performance index in (25), to calculate the lower value for the controlled system output
; hence, we obtain
first, then utilize the final-value theorem to minimize the performance index [
11]. Thus, consider Lemma 2 and (25), the algebraic Riccati equation is given by
Solving the matrix from the algebraic Riccati equation then the control gain can be constructed. Notice that the PI gains in are determined based on the linear model first, then take the perturbation estimator into consideration to determine the control law in (22) and (23), based on the final-value theorem which will be discussed in detail later.
Finally, it is desirable to determine the term in (19). Since Lemma 2 is utilized, then the traditional LQAT cannot be adopted to design the control law . Therefore, the final-value theorem can be utilized to find out the control law . Since, the PI controller gain has been chosen, the sliding mode is reached and is convergence then the control law can be calculated by the final-value theorem.
Theorem 2. Theterm is determined based on the integration-term-free augmented system in (22) and (23), where.
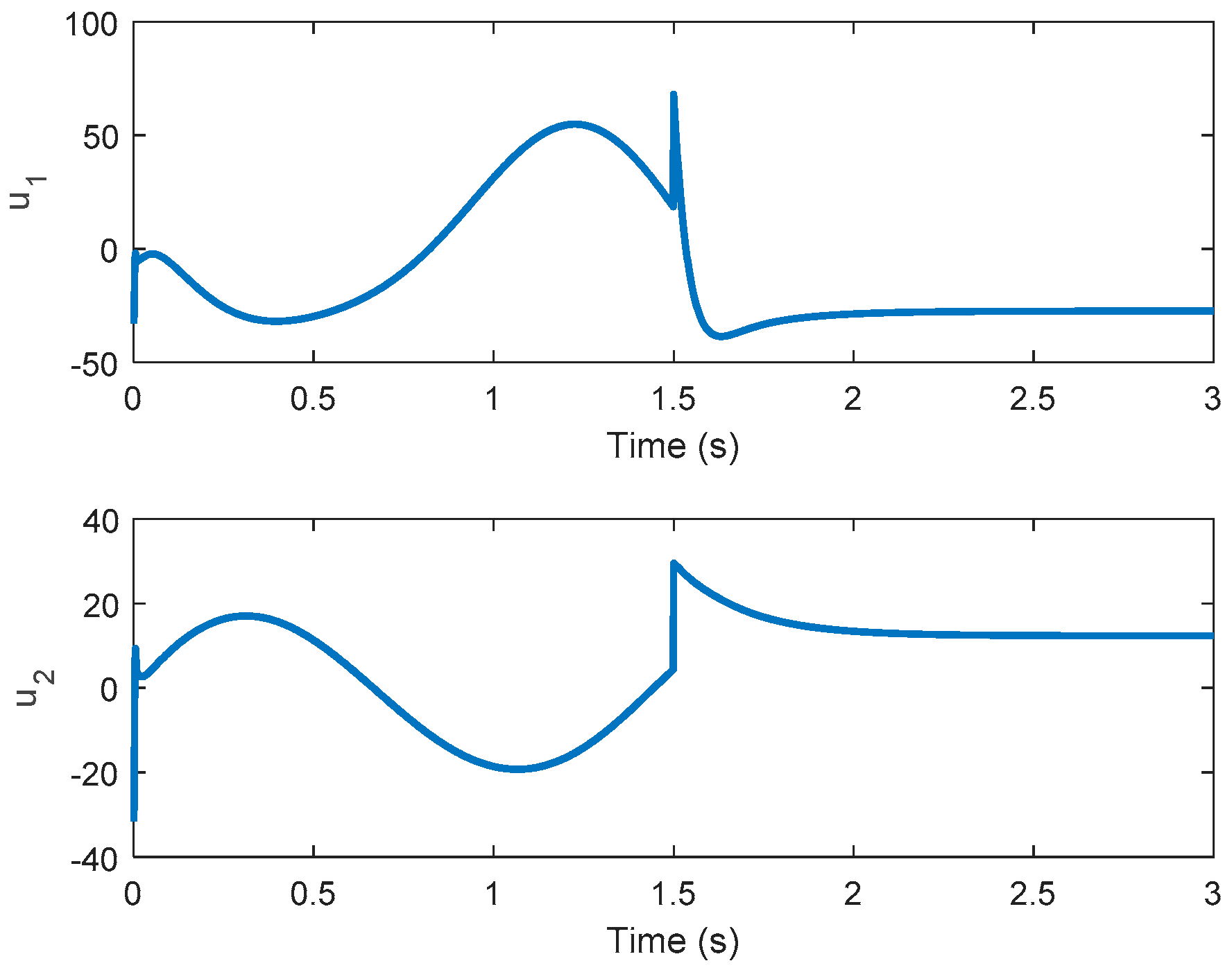
Finally, based on Theorem 2, the desire control law can be described as
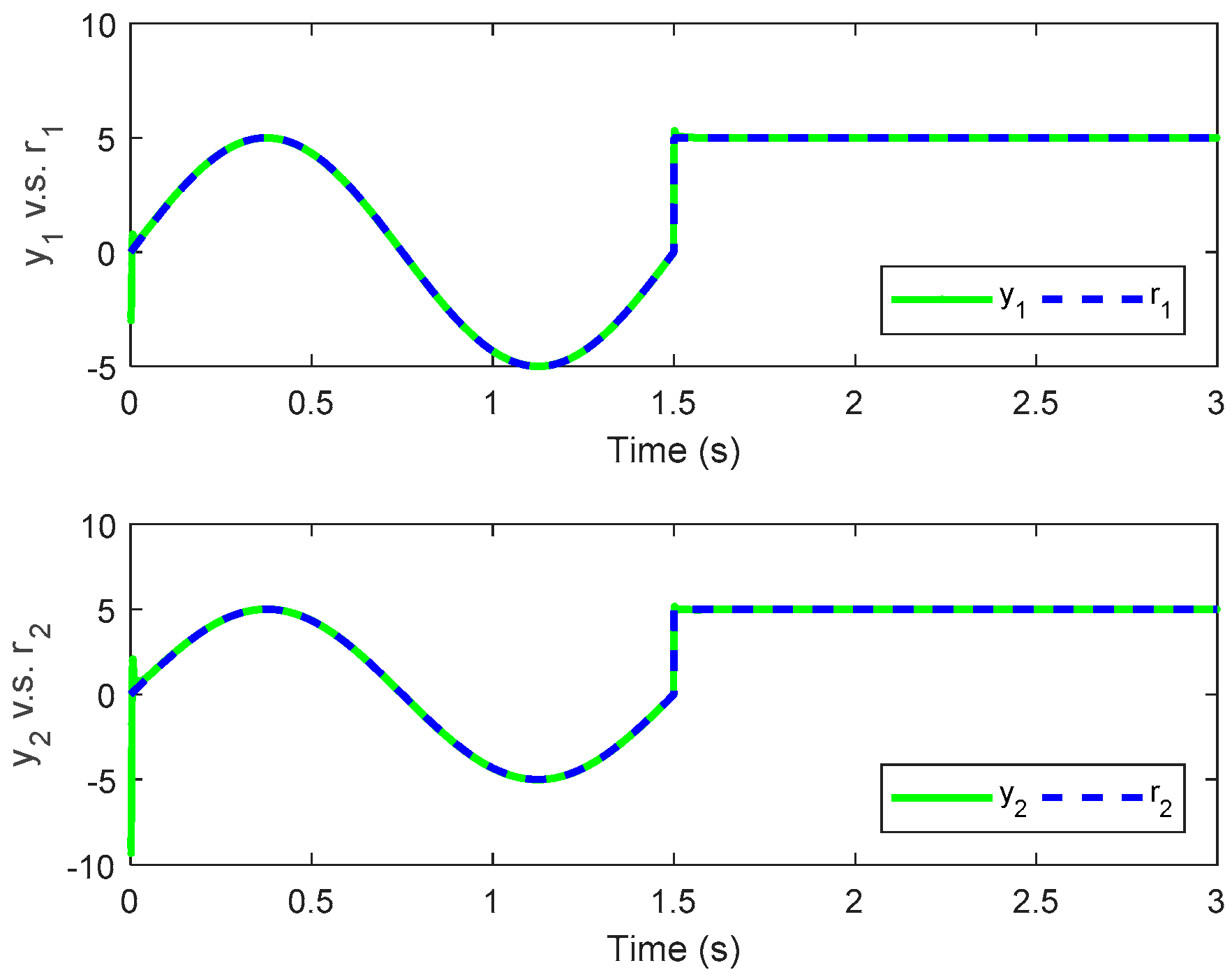
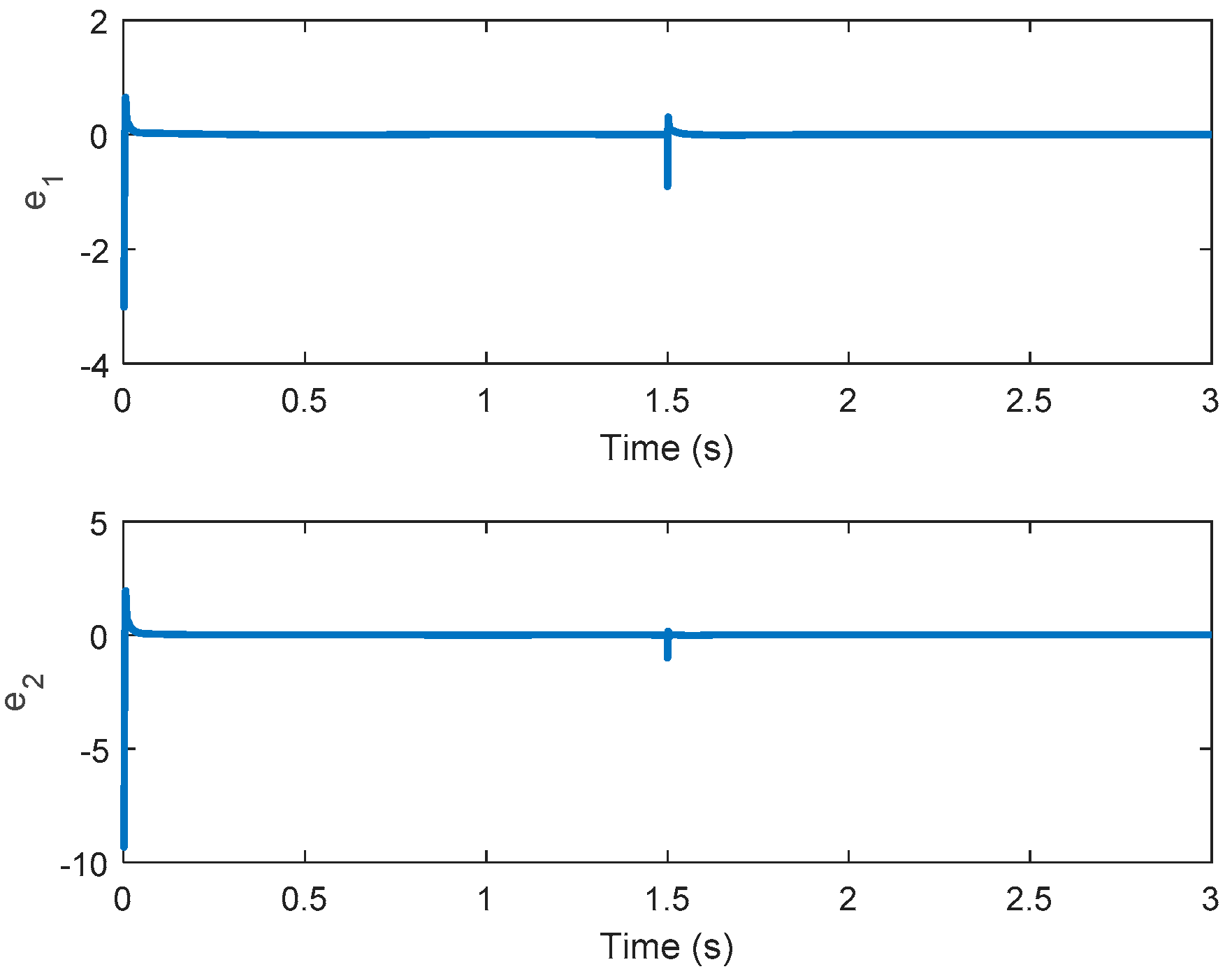
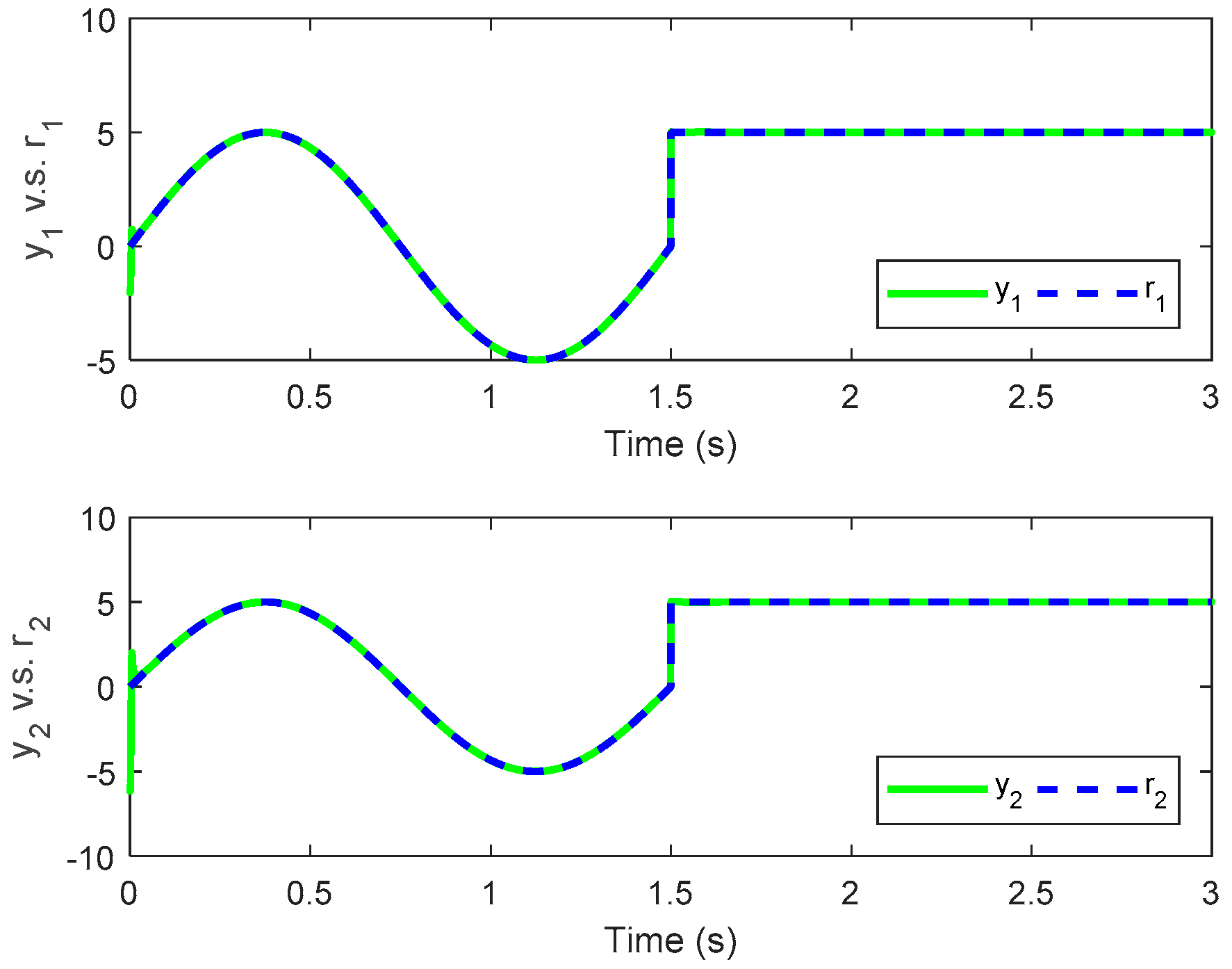
Remark 3. If theequals to 1, the PID-type controller reduces to the PI-type controller. The control law in (27) is utilized to minimize the tracking performance in (25). Therefore, the controlled system outputcan track the reference trajectoryand the tracking error can be minimized.
4. Hybrid Taguchi and Real Coded DNA Algorithm
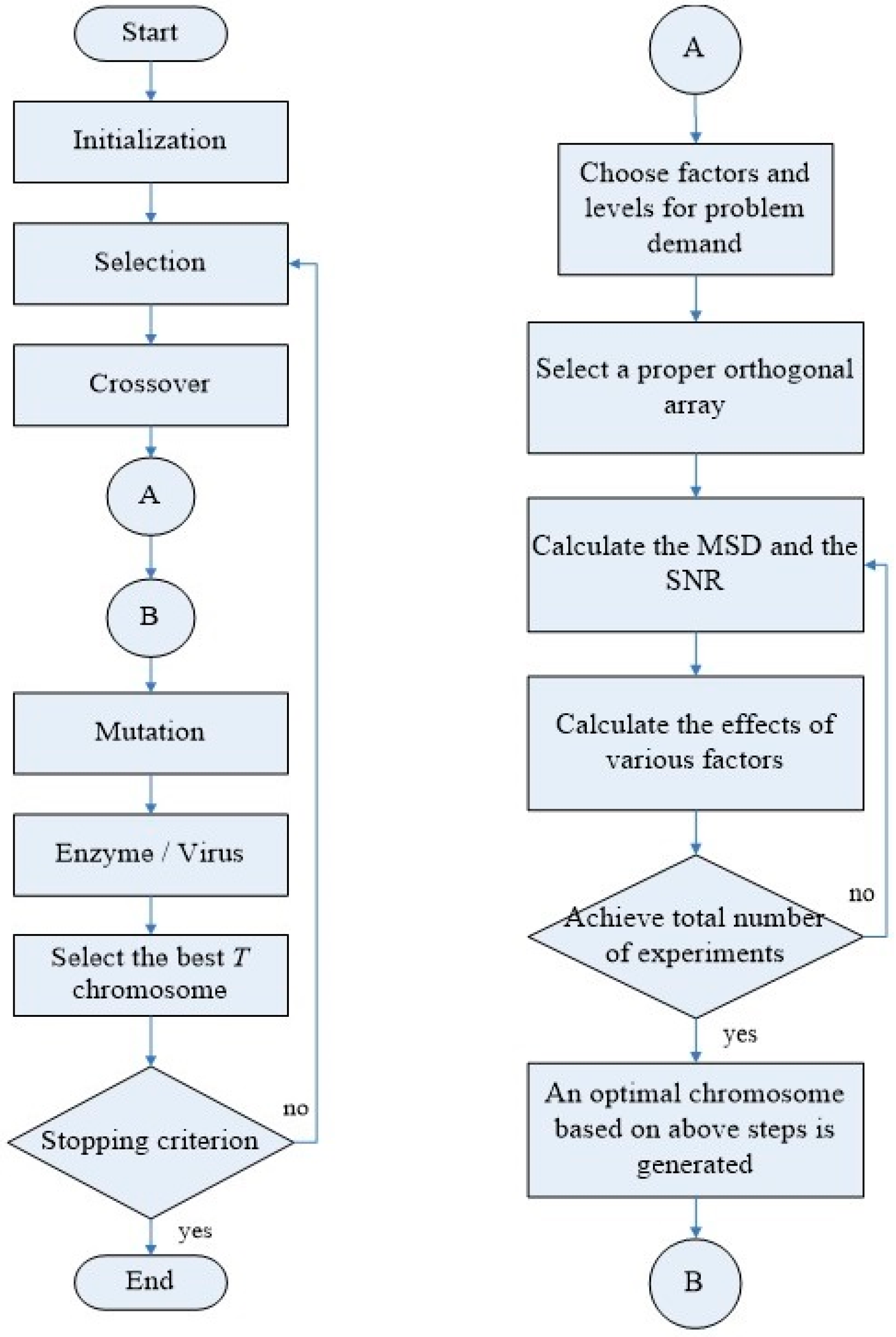
In this section, we are going to take advantage of DNA algorithm and Taguchi method in real coded scheme and combine with the controller design mentioned previously to select a suitable tracking controller. The detailed steps are described in
Figure 1 and illustrated in the following statements.
Step 1: Coding strategy: Define a set of chromosomes including the PID gain matrices
in the block vector form as follows
The previously mentioned controllers can be composed of P controller, PI controller, PD controller, and PID controller. Therefore, definitions of various controller variables are
and
where
denotes the
chromosome in the whole group.
Step 2: Initialization: Before we search a solution to approximate the optimal solution, we need to generate chromosomes for the population, which is called primitive group. To determine the different gain values in every chromosome, we select the parameters in and in (for example ) randomly to create four optimal chromosomes for each type controller, and select a gain matrix randomly to multiply the optimal chromosomes for other chromosomes until the population is reached. Each component of is given a range by . Generally, the size of the primitive group depends on the problem complexity; in other words, the more complicated the problem, the larger the primitive group we need. In the experiment, we generate chromosomes for each type of controller.
Step 3: Reproduction: Tournament selection can be adopted to find the lower cost value for the next population.
Step 4: Crossover: The offspring chromosome has the partial characteristic from the parents after crossover. Refer to [
31,
34,
35], a real coded crossover operator is defined and rewritten as follows
where
and
represent different chromosomes. The parameter
is randomly selected and defined in a range
. The crossover operator is allowed to mate with identical type controllers in the mating pool. For instance, a PI-type controller parameter
only mates with the same feature chromosome.
Step 5: Choosing a proper orthogonal array: Determine the number of factors and levels to construct a suitable orthogonal array for the problem demand. In the simulation, we choose three factors to make an experiment and the factors are the PID parameters. A two-level orthogonal array is studied.
Step 6: Selecting chromosomes and Taguchi experiments: This step can do runs to generate better chromosomes into every generation. Select a best chromosome and randomly choose another chromosome from the population. Both chromosomes are obtained to execute Taguchi method and find the better solution. In each generation, both chromosomes can be the same type of controllers or different type controllers. For example, both chromosomes and are the levels to be selected and each PID parameter is the factor in the orthogonal array. In this paper, the orthogonal array selects . The , and are represented level 1 and the , and are represented level 2. Calculate the SNR of each experiment in the orthogonal array, then calculate the effect of the various factors. The tracking performance is obtained and the small one is best. The formulation of SNR can be rewritten as where represents the number of factor, represents the number of level ( to be defined later), and the smaller one can be obtained. After the orthogonal array experiment, the smaller SNRs are obtained to find the best factors and the best chromosome can be found by each level. For example, level 1 is obtained in the factor such that is selected; level 2 is obtained in the factor , such that can be selected; level 1 is obtained in the factor such that is selected. Based on the above description, the best chromosome is .
Step 7: Mutation: Real coded changes its value by extending or shortening the scalar. Refer to [
31,
34,
35], we can re-implement the mutation operator as the following
where
is randomly selected in a range
. By doing this way, it changes both the scalar and the direction to achieve mutation operator.
Step 8: Enzyme/Virus: Select two chromosomes from the population. Enzyme and virus operators can provide us with a suitable controller type. Two different type chromosomes from the pool of {P, PI, PD, PID} are randomly selected. For instance, the former operator can transform PID controller to P controller, PI controller or PD controller; the latter operator transforms P controller to PI controller, PD controller, or PID controller.
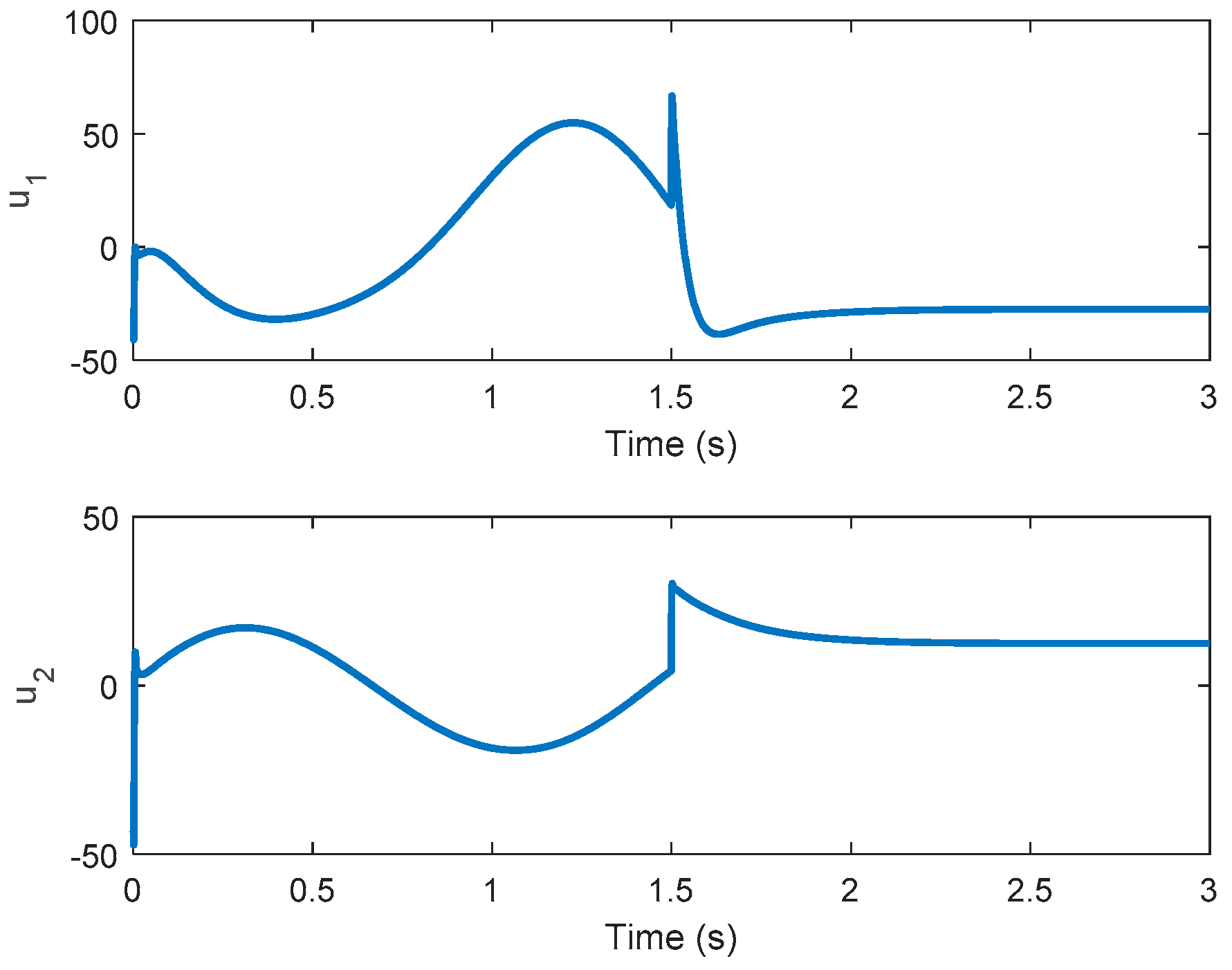
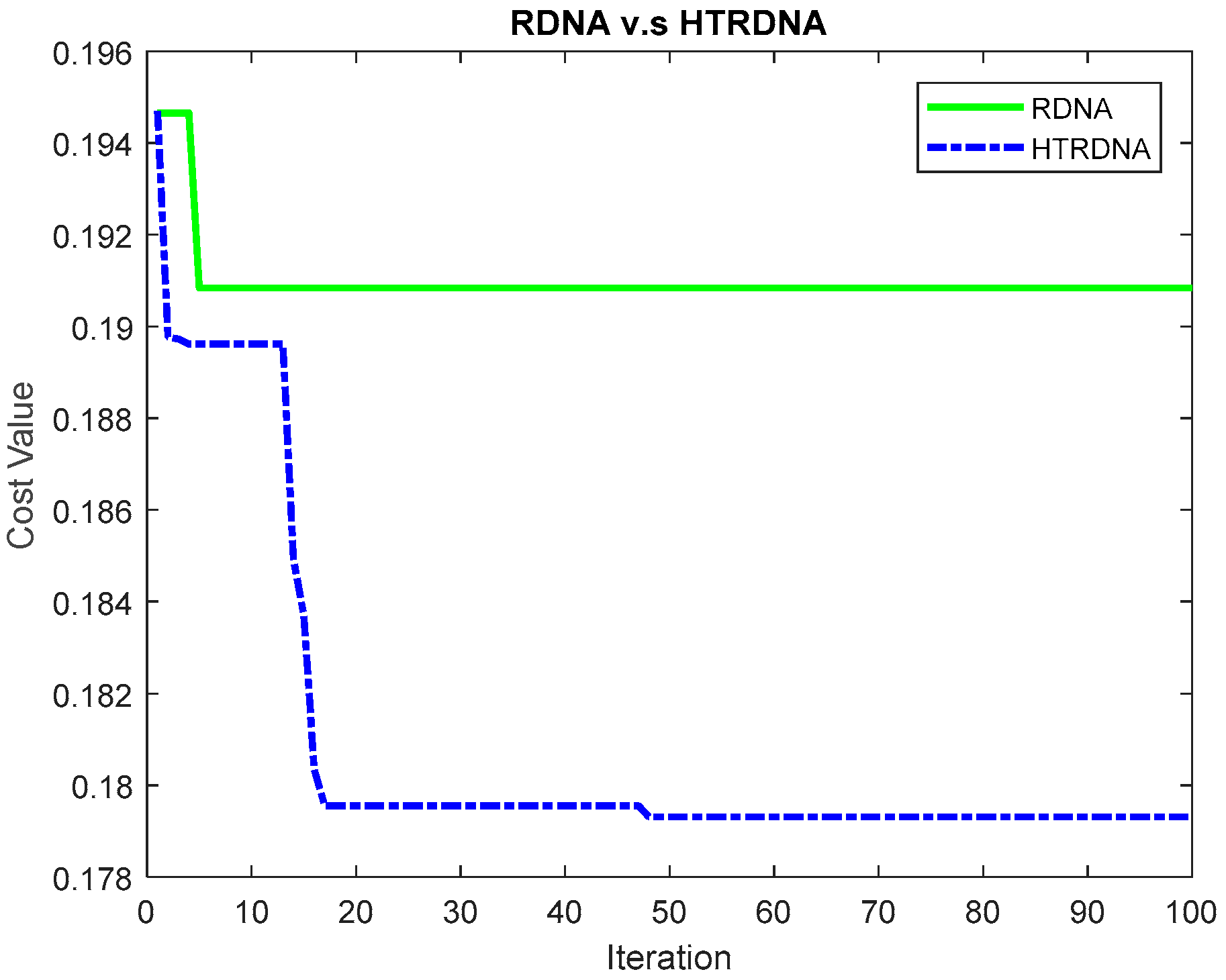
Step 9: Calculating cost value: In order to evolve the population, the cost function is employed to evaluate the value of each chromosome and the minimum one is the best chromosome. We define the cost function as
where
denotes the error between the output and the pre-specified trajectory,
denotes the control force, and
denotes the cost value.
Step 10: Stopping criterion: If the stopping criterion is reached, then the algorithm is terminated. Otherwise, return to Step 3 and continue to Step 10.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}