Numerical Performance Evaluation of Solar Photovoltaic Water Pumping System under Partial Shading Condition using Modern Optimization


 ,
,  ,
,
Abstract
:1. Introduction
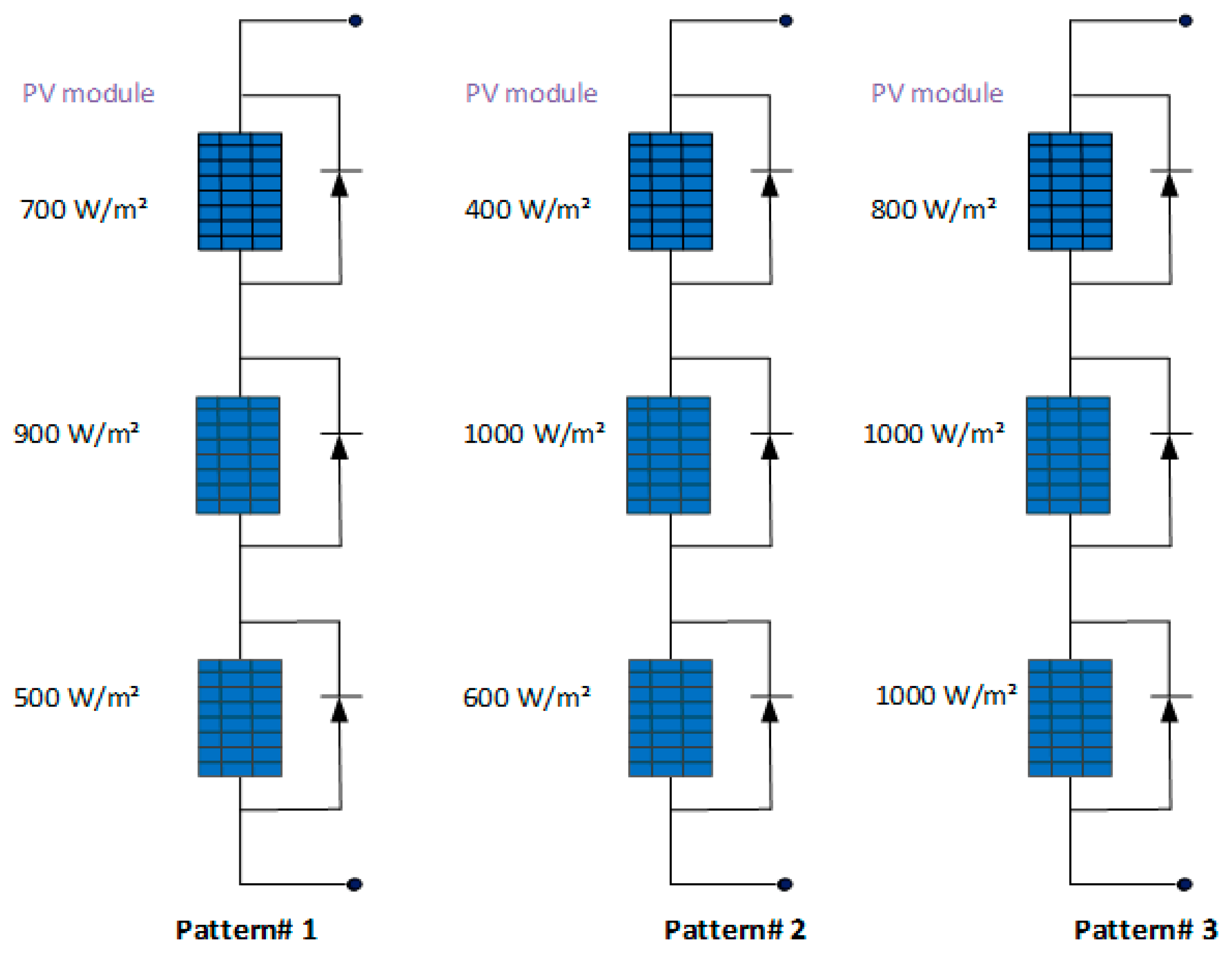
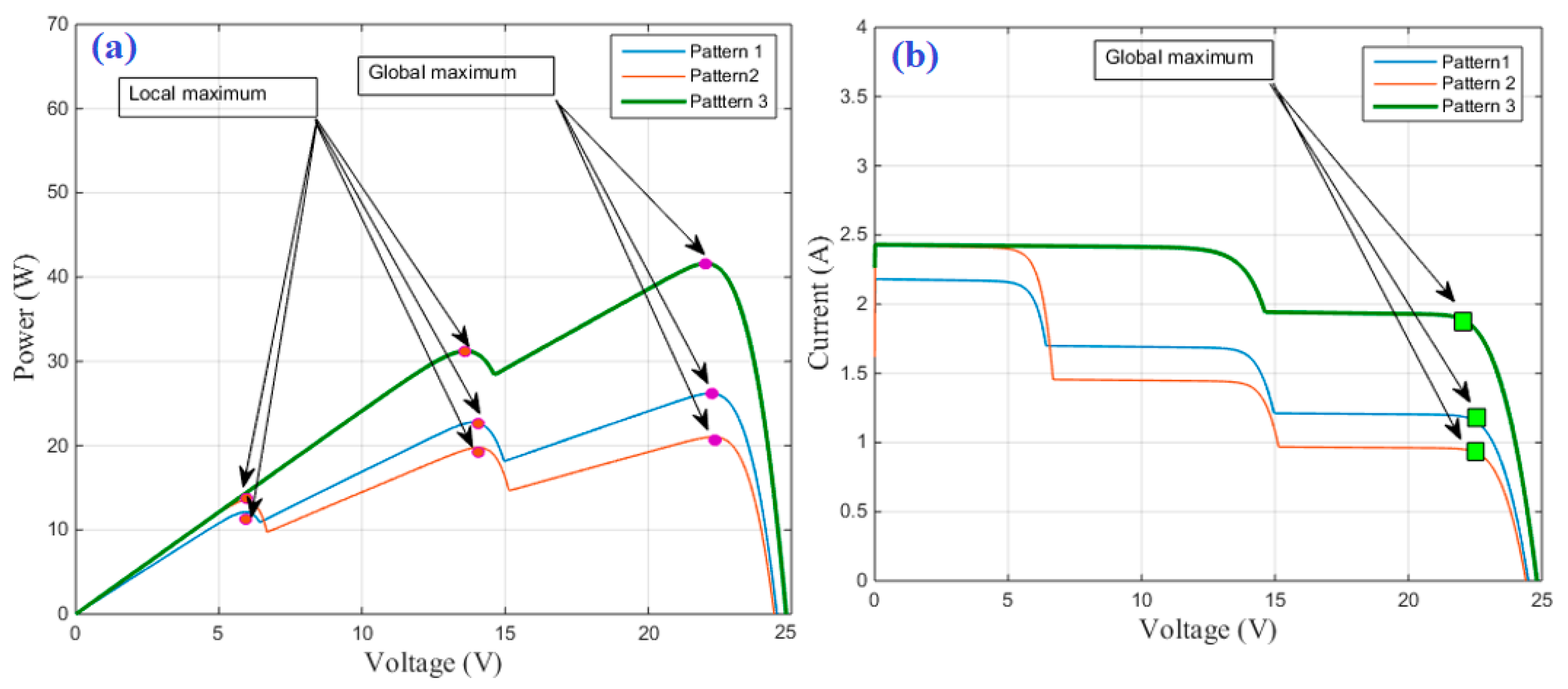
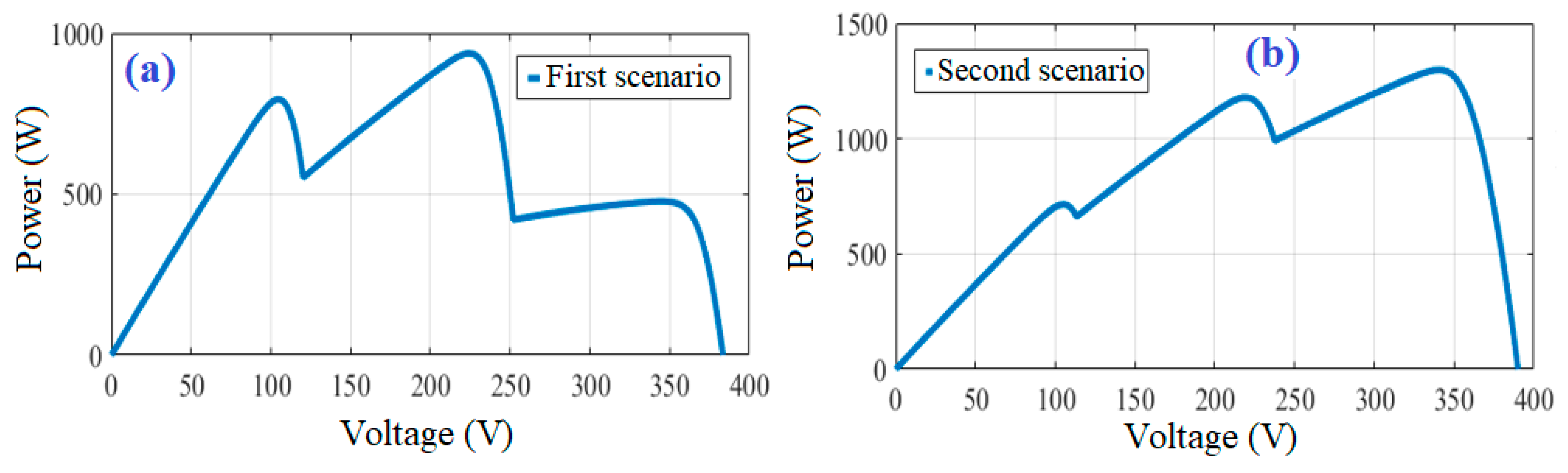
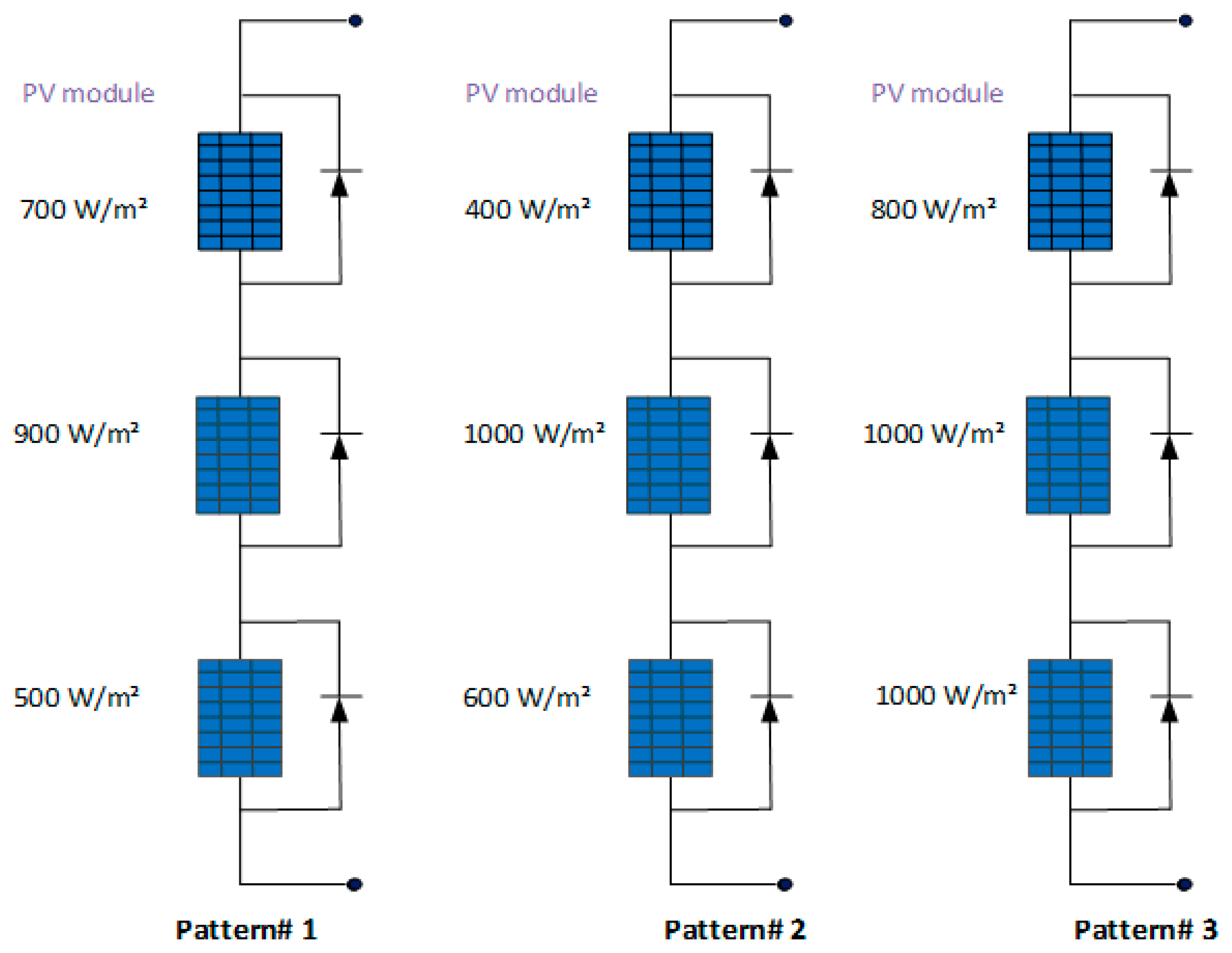
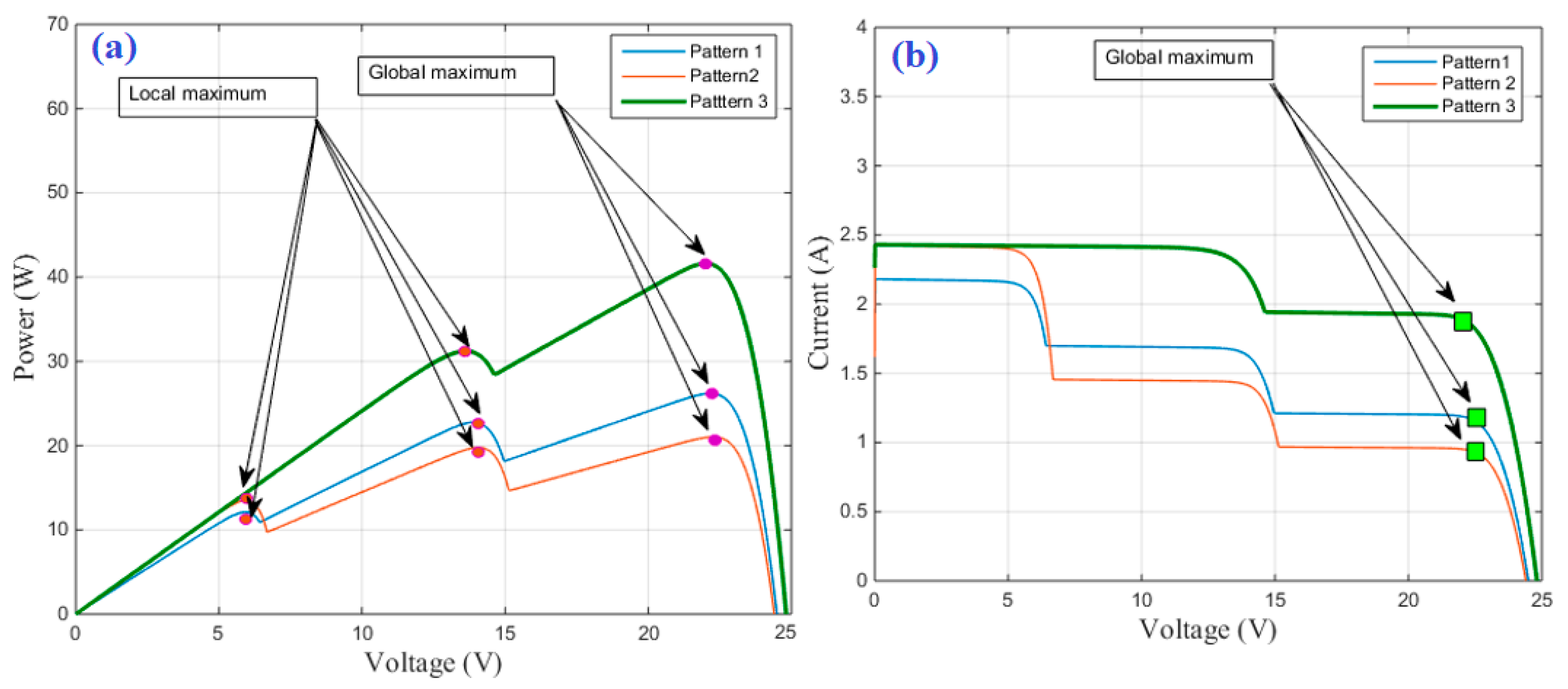
2. Partial Shading Condition
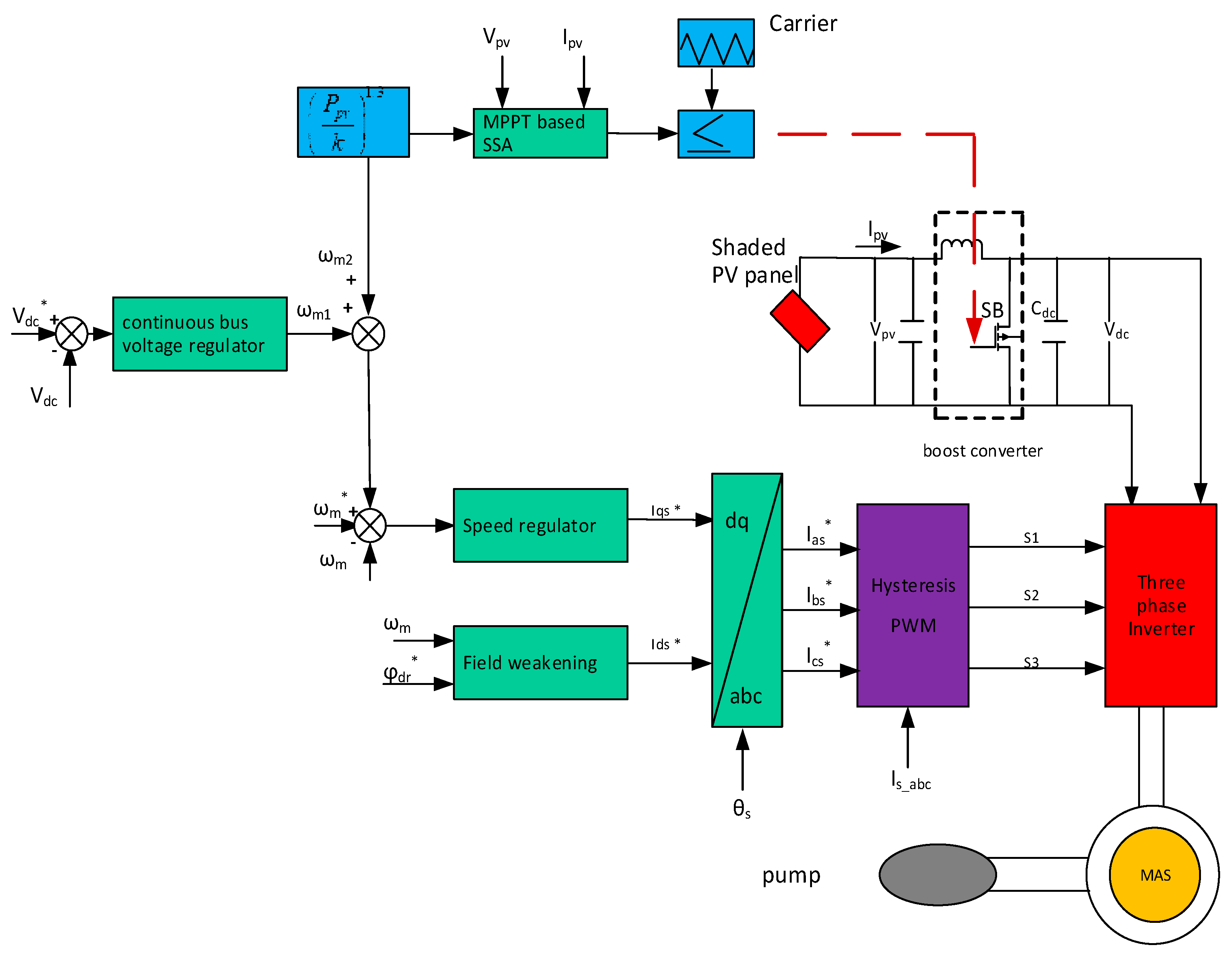
3. Configuration of Proposed PV Pumping System
- (1)
- PV panels to supply power the induction motor through a three-phase current inverter (CSI: Current Source Inverter).
- (2)
- PWM hysteresis technique is used to control the current inverter.
- (3)
- A DC-DC Boost converter, which ensures the tracking of the global MPP under partial shading conditions through the use of the SSA optimization approach.
- (4)
- Flux weakening element is needed to generate the reference current () and the speed regulator output represents ().
- (5)
- A motor pump driven by vector control [48].
- (6)
- The reference speed is a function of the photovoltaic power coming from the MPPT control bloc and the DC bus voltage controller, type (PI).
3.1. Modeling of the Asynchronous Machine
3.2. Modeling of Centrifugal Pump
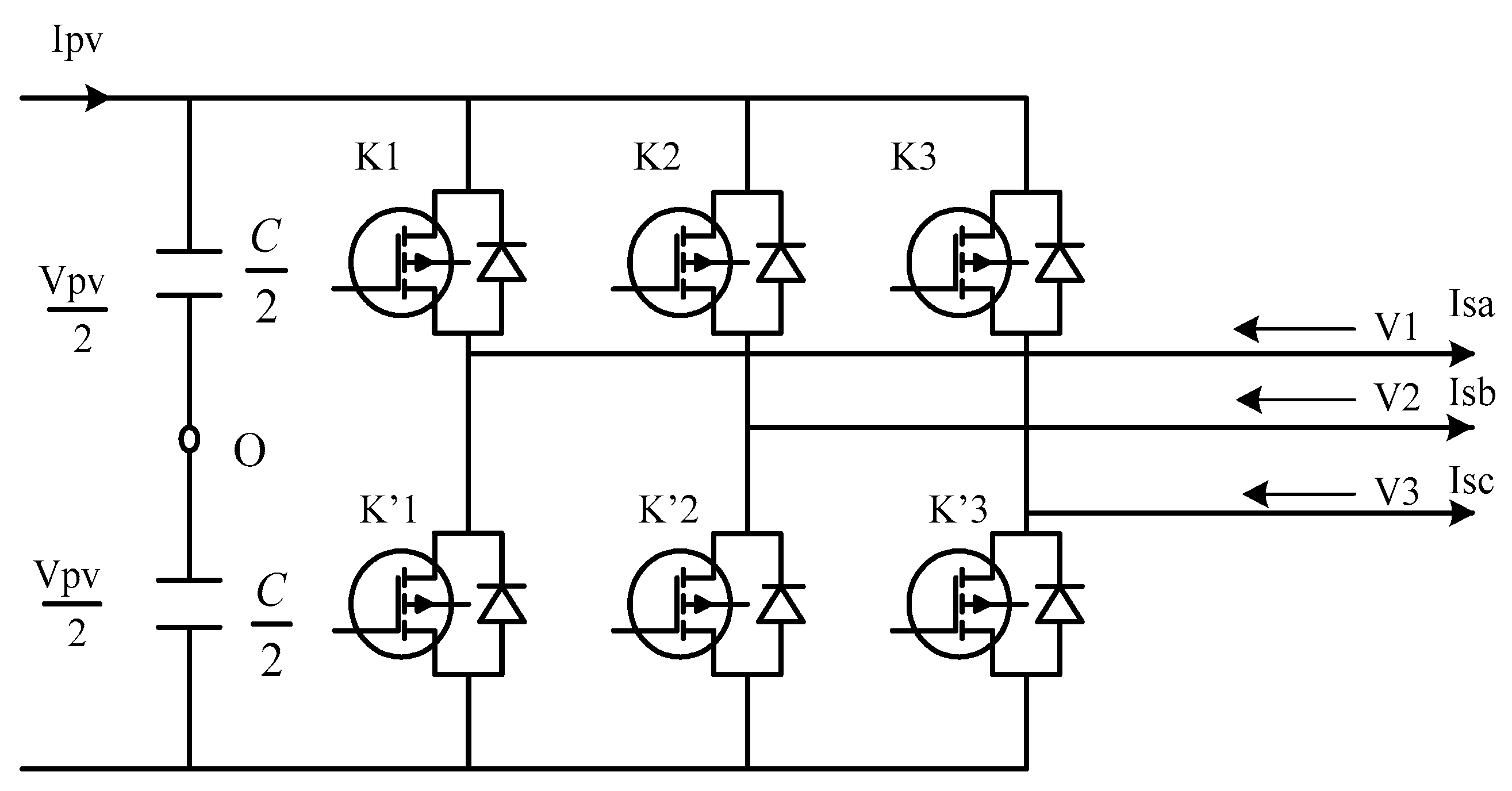
3.3. Three Phase Inverter
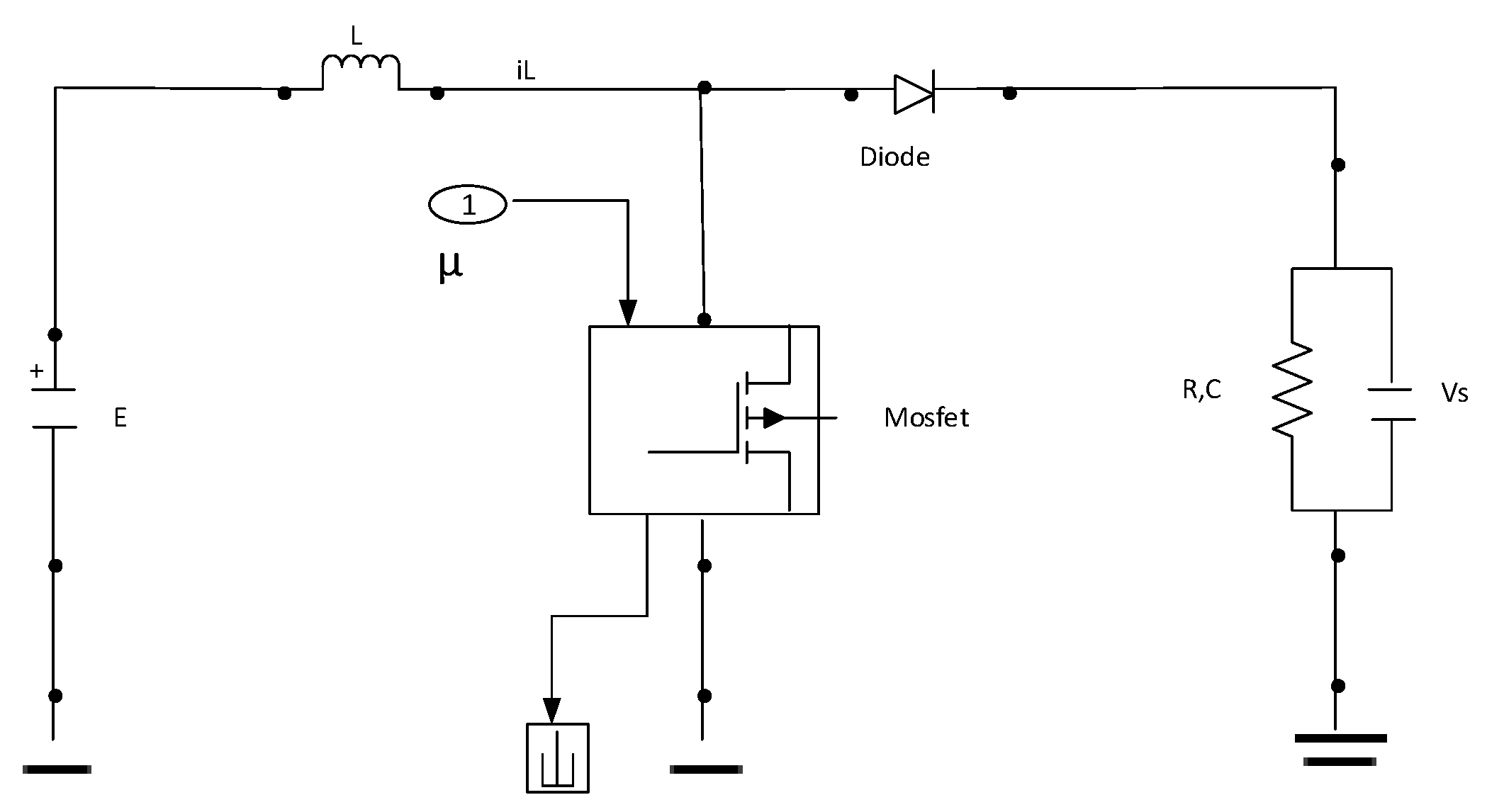
3.4. DC-DC Boost Converter
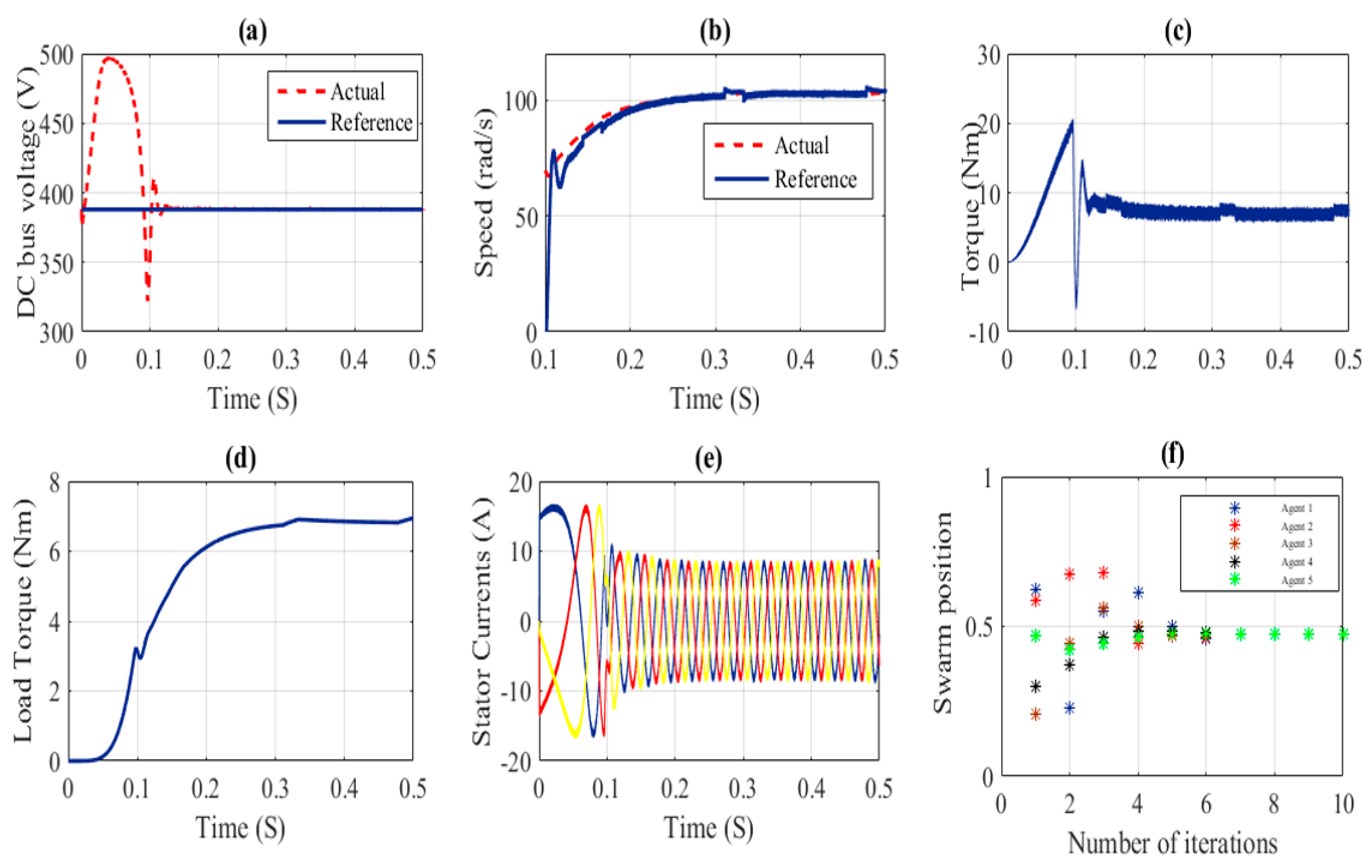
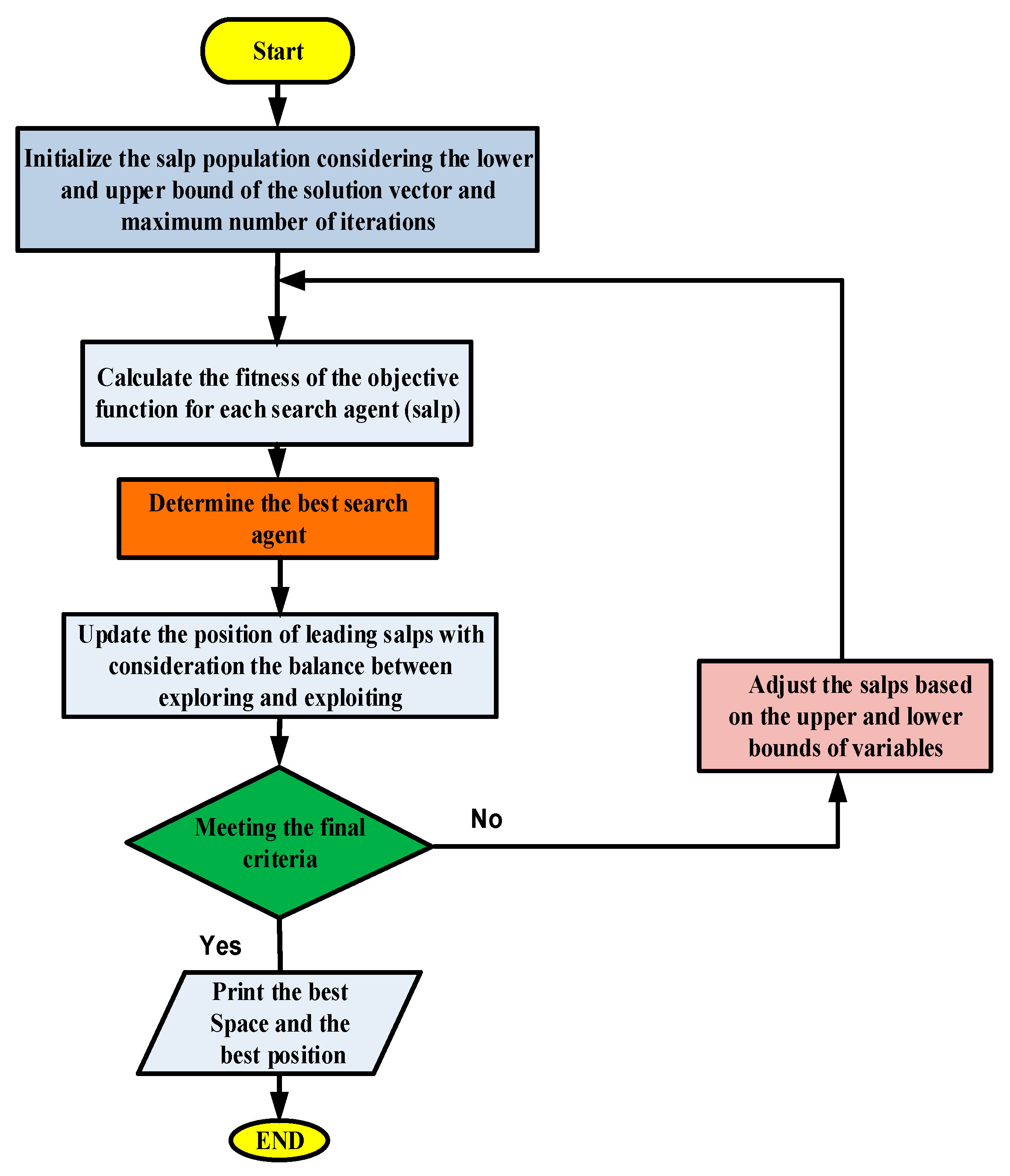
3.5. GMPP Based Salp Swarm Algorithm
3.6. Details of a Case Study
4. Results and Discussions
5. Conclusions
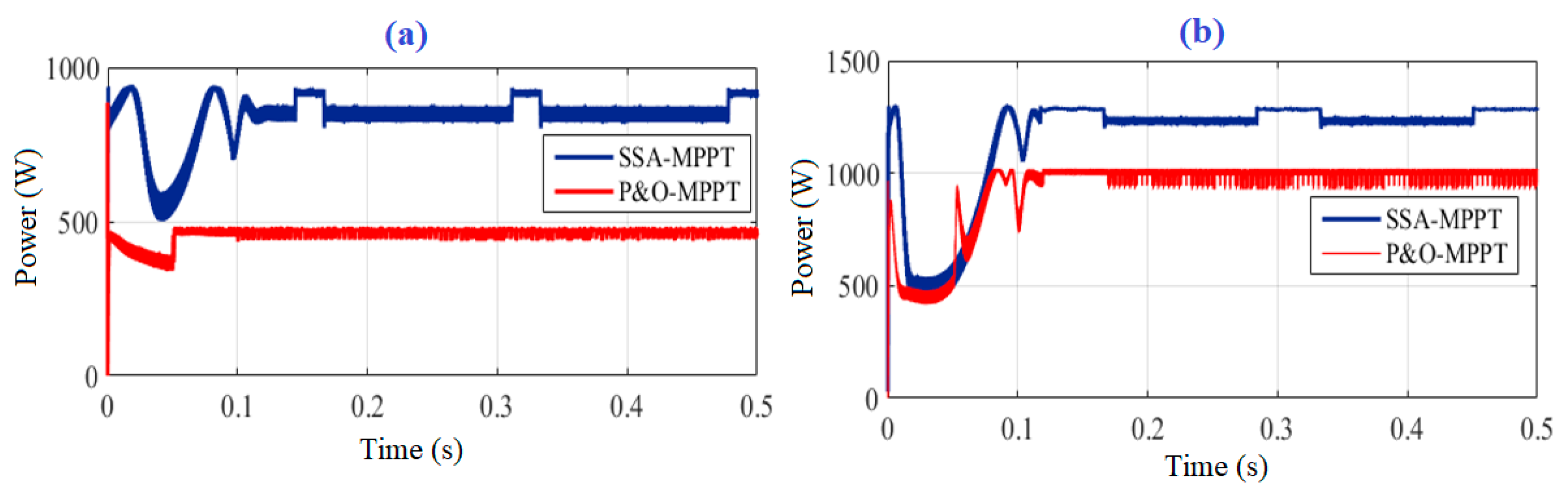
- During the first shading scenario, the PV output power and pump torque are increased by 93.68% and 45.83%, respectively by using SSA based tracker compared with using P&O based tracker.
- During the second shading scenario, the PV output power is increased by 25.88% using SSA based tracker compared with using P&O based tracker.
- The superiority of SSA compared with particle swarm optimization (PSO) and genetic algorithm (GA) is proved.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| AC | Alternating Current |
| CSI | Current Source Inverter |
| DC | Direct Current |
| GA | Genetic Algorithm |
| GMPP | Global Maximum Power Point |
| IFOC | Indirect Field Oriented Control |
| IRFOC | Indirect Rotor Field Oriented Control |
| IMD | Induction Motor Drive |
| MPP | Maximum Power Point |
| MPPT | Maximum Power Point Tracking |
| PSC | Partial Shading Conditions |
| PSO | Particle Swarm Optimization |
| PSO-MPPT | Maximum Power Point Tracking based Particle Swarm Optimization |
| PV | Photovoltaic |
| P-V | Power-Voltage |
| P-I | Power-Current |
| PWM | Pulse Width Modulation |
| P&O | Perturb and Observe |
| SPIM | Single Phase Induction Motor |
| SPWPS | Solar Photovoltaic Water Pumping System |
| SPV | Solar Photovoltaic |
| SSA | Salp Swarm Algorithm |
| SSA-MPPT | Maximum Power Point based Salp Swarm Algorithm |
| VSI | Voltage Source Inverter |
References
- Marmoush, M.M.; Rezk, H.; Shehata, N.; Henry, J.; Gomaa, M.R. A novel merging Tubular Daylight Device with Solar Water Heater—Experimental study. Renew. Energy 2018, 125, 947–961. [Google Scholar] [CrossRef]
- Al-Dhaifallah, M.; Nassef, A.M.; Rezk, H.; Nisar, K.S. Optimal parameter design of fractional order control based INC-MPPT for PV system. Sol. Energy 2018, 159, 650–664. [Google Scholar] [CrossRef]
- Rezk, H.; Fathy, A. A novel optimal parameters identification of triple-junction solar cell based on a recently meta-heuristic water cycle algorithm. Sol. Energy 2017, 157, 778–791. [Google Scholar] [CrossRef]
- Fathy, A.; Rezk, H. Parameter Estimation of Photovoltaic System Using Imperialist Competitive Algorithm. Renew. Energy 2017, 111, 307–320. [Google Scholar] [CrossRef]
- Rezk, H.; Dousoky, G.M. Technical and economic analysis of different configurations of stand-alone hybrid renewable power systems—A case study. Renew. Sustain. Energy Rev. 2016, 62, 941–953. [Google Scholar] [CrossRef]
- Rezk, H.; Shoyama, M. Techno-economic optimum sizing of stand-alone photovoltaic/fuel cell renewable system for irrigation water pumping applications. In Proceedings of the IEEE International Conference on Power and Energy (PECon), Kuching, Malaysia, 1–3 December 2014; pp. 182–186. [Google Scholar]
- Rezk, H. A comprehensive sizing methodology for stand-alone battery-less photovoltaic water pumping system under the Egyptian climate. Cogent Eng. 2016, 3. [Google Scholar] [CrossRef]
- Rezk, H.; El-Sayed, A.H.M. Sizing of a Stand Alone Concentrated Photovoltaic System in Egyptian Site. Int. J. Electr. Power Energy Syst. 2015, 45, 325–330. [Google Scholar] [CrossRef]
- Rezk, H.; Tyukhov, I.; Al-Dhaifallaha, M.; Tikhonov, A. Performance of data acquisition system for monitoring PV system parameters. Measurement 2017, 104, 204–211. [Google Scholar] [CrossRef]
- Rezk, H.; Tyukhov, I.; Raupov, A. Experimental implementation of meteorological data and photovoltaic solar radiation monitoring system. Int. Trans. Electr. Energy Syst. 2015, 25, 3573–3585. [Google Scholar] [CrossRef]
- Tolba, M.; Rezk, H.; Diab, A.; Al-Dhaifallah, M. A Novel Robust Methodology Based Salp Swarm Algorithm for Allocation and Capacity of Renewable Distributed Generators on Distribution Grids. Energies 2018, 11, 2556. [Google Scholar] [CrossRef]
- Rezk, H.; Hasaneen, E.-S. A new MATLAB/Simulink model of triple-junction solar cell and MPPT based on artificial neural networks for photovoltaic energy systems. Ain Shams Eng. J. 2015, 6, 873–881. [Google Scholar] [CrossRef]
- Rezk, H.; Eltamaly, A.M. A comprehensive comparison of different MPPT techniques for photovoltaic systems. Sol. Energy 2018, 112, 1–11. [Google Scholar] [CrossRef]
- Shukla, S.; Singh, B. Reduced Sensor Based PV Array Fed Direct Torque Control of Induction Motor Drive for Water Pumping. IEEE Trans. Power Electron. 2019, 34, 5400–5415. [Google Scholar] [CrossRef]
- Kumar, N.; Singh, B.; Panigrahi, B.K. Integration of Solar PV with Low-Voltage Weak Grid System: Using Maximize-M Kalman Filter and Self-tuned P&O Algorithm. IEEE Trans. Ind. Electron. 2019, 66, 9013–9022. [Google Scholar]
- Hamidat, A.B. Small-scale irrigation with photovoltaic water pumping system in Sahara regions. Renew. Energy 2003, 28, 1081–1096. [Google Scholar] [CrossRef]
- Liu, Y.C. Global maximum power point tracking algorithm for PV systems operating under partially shaded conditions using the segmentation search method. Sol. Energy 2014, 103, 350–363. [Google Scholar] [CrossRef]
- Gao, X.L. Feasibility evaluation of solar photovoltaic pumping irrigation system based on analysis of dynamic variation of ground water table. Appl. Energy 2013, 105, 182–193. [Google Scholar] [CrossRef]
- Khatib, T. Deign of photovoltaic water pumping systems at minimum cost for Palestine: A review. J. Appl. Sci. 2010, 10, 2773–2784. [Google Scholar] [CrossRef]
- Meah, K.U. Solar photovoltaic water pumping—Opportunities and challenges. Renew. Sustain. Energy Rev. 2008, 12, 1162–1175. [Google Scholar] [CrossRef]
- Meah, K.F. Solar photovoltaic water pumping for remote locations. Renew. Sustain. Energy Rev. 2008, 12, 472–487. [Google Scholar] [CrossRef]
- Hamrouni, N.J. Theoretical and experimental analysis of the behavior of a photovoltaic pumping system. Sol. Energy 2009, 83, 1335–1344. [Google Scholar] [CrossRef]
- Himri, Y.; Malik, A.S.; Stambouli, A.B.; Himri, S.; Draoui, B. Review and use of the Algerian renewable energy for sustainable development. Renew. Sustain. Energy Rev. 2009, 13, 1584–1591. [Google Scholar] [CrossRef]
- Gopal, C.M. Renewable energy source water pumping systems—A literature review. Renew. Sustain. Energy Rev. 2013, 25, 351–370. [Google Scholar] [CrossRef]
- Periasamy, P.J. A review on development of photovoltaic water pumping system. Renew. Sustain. Energy Rev. 2015, 43, 918–925. [Google Scholar] [CrossRef]
- Chandel, S.N. Review of solar photovoltaic water pumping system technology for irrigation and community drinking water supplies. Renew. Sustain. Energy Rev. 2015, 49, 1084–1099. [Google Scholar] [CrossRef]
- Feraga, C.-E.; Bouldjedri, A. Performance of a Photovoltaic Pumping System Driven by a Single Phase Induction Motor Connected to a Photovoltaic Generator. Automatika 2016, 57, 163–172. [Google Scholar] [CrossRef]
- Sharma, U.; Singh, B.; Kumar, S. Intelligent grid interfaced solar water pumping. IET Renew. Power Gener. 2017, 11, 614–624. [Google Scholar] [CrossRef]
- Diab, A.A.Z.; Rezk, H. Global MPPT based on flower pollination and differential evolution algorithms to mitigate partial shading in building integrated PV system. Sol. Energy 2017, 157, 171–186. [Google Scholar] [CrossRef]
- Rezk, H.; Fathy, A. Simulation of global MPPT based on teaching–learning-based optimization technique for partially shaded PV system. Electr. Eng. 2017, 99, 847–859. [Google Scholar] [CrossRef]
- Rezk, H.; Fathy, A.; Abdelaziz, A.Y. A comparison of different global MPPT techniques based on meta-heuristic algorithms for photovoltaic system subjected to partial shading conditions. Renew. Sustain. Energy Rev. 2017, 74, 377–386. [Google Scholar] [CrossRef]
- Rezk, H.; Fathy, A. A Novel Methodology for Simulating Maximum Power Point Trackers Using Mine Blast Optimization and Teaching Learning Based Optimization Algorithms for Partially Shaded PV System. J. Renew. Sustain. Energy 2016, 8. [Google Scholar] [CrossRef]
- Mohamed, M.A.; Diab, A.A.Z.; Rezk, H. Partial Shading Mitigation of PV Systems via Different Meta-Heuristic Techniques. Renew. Energy 2018, 130, 1159–1175. [Google Scholar] [CrossRef]
- Avila, E.; Pozo, N.; Pozo, M.; Salazar, G.; Domínguez, X. Improved particle swarm optimization based MPPT for PV systems under Partial Shading Conditions. In Proceedings of the IEEE Southern Power Electronics Conference (SPEC), Puerto Varas, Chile, 4–7 December 2017. [Google Scholar]
- Liu, Y.; Huang, S.; Huang, J.; Liang, W. A particle swarm optimization-based maximum power point tracking algorithm for PV systems operating under partially shaded conditions. IEEE Trans. Energy Convers. 2012, 27, 1027–1035. [Google Scholar] [CrossRef]
- Tey, K.S.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B.; Oo, A.T.; Stojcevski, A. Improved Differential Evolution-based MPPT Algorithm using SEPIC for PV Systems under Partial Shading Conditions and Load Variation. IEEE Trans. Ind. Inform. 2018, 14, 4322–4333. [Google Scholar] [CrossRef]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Rapid MPPT for uniformly and partial shaded PV system by using JayaDE algorithm in highly fluctuating atmospheric conditions. IEEE Trans. Ind. Inform. 2017, 13, 2406–2416. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A Grey Wolf Assisted Perturb & Observe MPPT Algorithm for a PV System. IEEE Trans. Energy Convers. 2017, 32, 340–347. [Google Scholar]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A New MPPT Design Using Grey Wolf Optimization Technique for Photovoltaic System Under Partial Shading Conditions. IEEE Trans. Sustain. Energy 2016, 7, 181–188. [Google Scholar] [CrossRef]
- Kumar, N.; Hussain, I.; Singh, B.; Panigrahi, B.K. Single sensor-based MPPT of partially shaded PV system for battery charging by using cauchy and gaussian sine cosine optimization. IEEE Trans. Energy Convers. 2017, 32, 983–992. [Google Scholar] [CrossRef]
- Ramasamy, S.; Jeevananthan, S.; Dash, S.S.; Vishnuram, P. A new maximum power tracking in PV system during partially shaded conditions based on shuffled frog leap algorithm. J. Exp. Theor. Artif. Intell. 2017, 29, 481–493. [Google Scholar]
- Sundareswaran, K.; Peddapati, S.; Palani, S. MPPT of PV systems under partial shaded conditions through a colony of flashing fireflies. IEEE Trans. Energy Convers. 2014, 29, 463–472. [Google Scholar]
- Seyedmahmoudian, M.; Horan, B.; Rahmani, R.; Oo, A.M.T.; Stojcevski, A. Efficient photovoltaic system maximum power point tracking using a new technique. Energies 2016, 9, 147. [Google Scholar] [CrossRef]
- Belhaouas, N.; AitCheikh, M.-S.; Agathoklis, P.; Oularbi, M.-R.; Amrouche, B.; Sedraoui, K.; Djilali, N. PV array power output maximization under partial shading using new shifted PV array arrangements. Appl. Energy 2017, 187, 326–337. [Google Scholar] [CrossRef]
- Rezk, H. An efficient single-sensor global maximum power point tracking method for partially shaded photovoltaic battery chargers. Int. J. Energy Res. 2019, 43, 8779–8789. [Google Scholar] [CrossRef]
- Li, G.; Jin, Y.; Akram, M.W.; Chen, X.; Ji, J. Application of bio-inspired algorithms in maximum power point tracking for PV systems under partial shading conditions—A review. Renew. Sustain. Energy Rev. 2018, 81, 840–873. [Google Scholar] [CrossRef]
- Henze, N.; Koirala, B.P.; Sahan, B. Study on MPP mismatch losses in photovoltaic applications. In Proceedings of the European Photovoltaic Solar Energy Conference and Exhibition, Hamburg, Germany, 21–25 September 2009; pp. 3727–3733. [Google Scholar]
- Devanshu, A.; Singh, M.; Kumar, N. DSP based feedback linearization control of vector controlled induction motor drive. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar]
- Hamid KHAN. Field Oriented Control, Application Note Polytechech’ Clermont-Ferrand, 2008.
- Devanshu, A.; Singh, M.; Kumar, N. Sliding Mode Control of Induction Motor Drive Based on Feedback Linearization. IETE J. Res. 2018, 1–14. [Google Scholar] [CrossRef]
- Kim, S.-H. Maximum torque control of an induction machine in the field weakening region. IEEE Trans. Ind. Appl. 1995, 31, 787–794. [Google Scholar]
- Singh, B.; Shukla, S.; Chandra, A.; Al-Haddad, K. Loss minimization of two stage solar powered speed sensorless vector controlled induction motor drive for water pumping. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 1–6. [Google Scholar]
- Salim, D.; Kheldoun, A.; Sadouni, R. Fuzzy indirect field oriented control of dual star induction motor water pumping system fed by photovoltaic generator. Int. J. Eng. Intell. Syst. Electr. Eng. Commun. 2015, 23, 63–76. [Google Scholar]
- Singh, S.; Singh, B. Solar PV water pumping system with DC-Link voltage regulation. Int. J. Power Electron. 2015, 7, 72. [Google Scholar] [CrossRef]
- Wanzeller, M.A. Current control loop for tracking of maximum power point supplied for photovoltaic array. IEEE Trans. Instrum. Meas. 2004, 53, 1304–1310. [Google Scholar] [CrossRef]
- Marouani, R.; Mami, A. Voltage Oriented Control Applied to a Grid Connected Photovoltaic System with Maximum Power Point Tracking Technique. Am. J. Appl. Sci. 2010, 7, 1168–1173. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp swarm algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PV voltage at MPP | 326 V |
| PV Power at MPP | 2400 W |
| PV current at MPP | 7.54 A |
| Number of series connected modules | 18 |
| Number of parallel connected modules | 13 |
| Open circuit voltage | 21.6 V |
| Short circuit current | 0.64 A |
| Voltage at maximum power point | 17.6 V |
| Current at maximum power point | 0.58 A |
| Nominal power: Pn | 2200 VA |
| Stator resistance: Rs | 0.603 Ω |
| Stator inductance: Ls | 0.00293 H |
| Rotor resistance: Rr | 0.7 Ω |
| Rotor inductance: Lr | 0.00293 H |
| Moment of inertia: J | 0.011 Kg.m2 |
| Number of poles: P | 4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Arfaoui, J.; Rezk, H.; Al-Dhaifallah, M.; Elyes, F.; Abdelkader, M. Numerical Performance Evaluation of Solar Photovoltaic Water Pumping System under Partial Shading Condition using Modern Optimization. Mathematics 2019, 7, 1123. https://doi.org/10.3390/math7111123
Arfaoui J, Rezk H, Al-Dhaifallah M, Elyes F, Abdelkader M. Numerical Performance Evaluation of Solar Photovoltaic Water Pumping System under Partial Shading Condition using Modern Optimization. Mathematics. 2019; 7(11):1123. https://doi.org/10.3390/math7111123
Chicago/Turabian StyleArfaoui, Jouda, Hegazy Rezk, Mujahed Al-Dhaifallah, Feki Elyes, and Mami Abdelkader. 2019. "Numerical Performance Evaluation of Solar Photovoltaic Water Pumping System under Partial Shading Condition using Modern Optimization" Mathematics 7, no. 11: 1123. https://doi.org/10.3390/math7111123
APA StyleArfaoui, J., Rezk, H., Al-Dhaifallah, M., Elyes, F., & Abdelkader, M. (2019). Numerical Performance Evaluation of Solar Photovoltaic Water Pumping System under Partial Shading Condition using Modern Optimization. Mathematics, 7(11), 1123. https://doi.org/10.3390/math7111123