1. Introduction
In recent years, systems for the transportation of suspended-payload using unmanned aerial vehicles (UAVs) have attracted research interest. Some important applications are described in [
1]. Quadrotor vehicles exhibit complex dynamic behavior, and if a cable-suspended payload is added to a quadrotor, it increases the complexity of the system because additional degrees of freedom (DOFs) due to the payload oscillation are introduced. Moreover, if uncontrolled, a cable-suspended payload changes the dynamics of the flying vehicle and it can result in an unstable system.
Recently, some control methodologies have been developed to attenuate the payload swing and to solve the general problem of a quadrotor carrying a cable-suspended payload. For example, a control algorithm based on a backstepping strategy is obtained in [
2], that ensures trajectory tracking of the quadrotor regardless of the payload swing. However, attitude control of the UAV is not considered. Additionally, a control design for a two-dimensional quadrotor with a cable-suspended payload that enables tracking of the vehicle rotation, the payload rotation, or the payload position is presented in [
3], and it was extended to the three-dimensional case in [
4].
In [
5], the authors develop a nested saturation controller capable of driving the vehicle to a specified position while simultaneously limiting the payload dynamic effect. For this work, Nicotra et al. considered the design for the two-dimensional case only and the attitude control of the vehicle was not considered. Moreover, a feed-forward control algorithm for reducing or canceling the payload’s oscillation is introduced in [
6]. This controller was designed by implementing the input shaping theory. In [
7], the authors present a geometric controller to exponentially stabilize the aerial robot position while aligning the links vertically below the vehicle. Similarly, a tracking control law for a UAV with a load attached by a cable represented as successively-attached inflexible links was designed in [
8]. A fixed-gain geometric PD control strategy is developed to reach the desired goal for a nominal load. An adaptive control law for an aerial robot carrying a payload attached using a cable was presented in [
9]. In [
10], an algorithm for parameterizing aerial vehicles transporting a payload employing a complementary constraint is presented. A nonlinear attitude controller is developed in [
11] to stabilize the altitude, and the translational dynamics control law is introduced by converting the vehicle velocity and position error into rotation control. Rego and Raffo [
12] address trajectory tracking for a two-dimensional aerial robot transporting a payload. A discrete-time mixed
linear control strategy is presented. In [
13], an active-model-based linear controller is designed for a UAV transporting a payload. A linear model is obtained considering the vehicle in hover flight mode. In [
14], a path tracking controller is developed based on existing Lyapunov-based path tracking control laws for free-flying aerial vehicles, which are further backstepped through the vehicle rotation dynamics.
A passivity-based control technique is used in [
15] to control the UAV such that cable-suspended payload swing reduction is achieved for the planar case. Here, the attitude control of the vehicle is not considered. Also, interconnection and damping assignment passivity-based control (IDA-PBC) without total energy-shaping for a UAV transporting a cable-suspended payload for planar maneuvers is developed in [
16,
17]. Two control laws with total energy-shaping are presented in [
18], where the closed-loop inertia matrices are modified. These works compute PDEs for synthesizing the control law. For this reason, the control strategy is only designed within the longitudinal plane. The control design for the three-dimensional case yields complex partial differential equations (PDEs).
In the literature, unmanned aerial vehicles have been controlled using energy-based controllers. In [
19], the design of two nonlinear controllers to stabilize an aerial vehicle characterized with quaternions and their axis-angle depiction is studied. Also, [
20] introduces a PBC for a vertical take-off and landing (VToL) vehicle. An estimator of unmodelled dynamics and external wrench acting on the UAV and based on the momentum of the system is used to compensate such disturbance effects. Moreover, [
21] develops an IDA-PBC methodology that is able to change the apparent vehicle dynamical parameters, while [
22] proposes a robust control of underactuated aerial manipulators via IDA-PBC.
On the other hand, some works apply control strategies based on linear matrix inequalities to UAVs. In [
23], a method for using LMIs to synthesize controller gains for a UAV system is presented. In [
24], a nonlinear state feedback controller based on LMIs, and a technique with pole placement constraint (PDC) is synthesized. The requirements of stability and pole placement in the linear matrix inequality (LMI) region are formulated based on the Lyapunov direct method.
In this work, the control approach is based on a hierarchical scheme considering the well-known time-scale separation between rotational and translational dynamics of the quadrotor. On one hand, the objective of this paper was to design an energy-based control law for the outer-loop (i.e., for the underactuated dynamics of the system). This control law is proposed for the three-dimensional case, and it is based on the translation dynamics, which is able to lead the vehicle to a desired position while simultaneously reducing the payload swing. Compared with similar works that present control laws based on passivity and energy, particularly for underactuated systems, the proposed controller avoids solving complex PDEs to obtain the control law. On the other hand, a feedback controller based on an LMI for the inner loop which is fully actuated is presented. The controller based on an LMI for the rotational dynamics results in a control algorithm with relative simplicity and with an easy analysis to demonstrate its stability.
The contribution of this paper is the synthesis of a new controller for a class of Lipschitz nonlinear systems. An important limitation of the classic results for Lipschitz nonlinear systems is that they perform well only for small values of the Lipschitz constant. In the case when the Lipschitz constant is large, most of the existing controller design approaches fail to contribute a solution to the LMI. This article introduces an algorithm that operates for larger Lipschitz constants compared with classical results in the literature.
This paper is organized as follows.
Section 2 describes the dynamical model for a three-dimensional aerial vehicle carrying a payload.
Section 3 presents an approach for LMI-based Lipschitz nonlinear systems. This theoretical approach is applied to stabilize the quadrotor rotational dynamics.
Section 4 proposes an energy-based control to stabilize the vehicle translational dynamics and to attenuate the payload swing.
Section 5 presents numerical simulations and results. Finally,
Section 6 gives conclusions and perspectives.
2. Dynamic Model
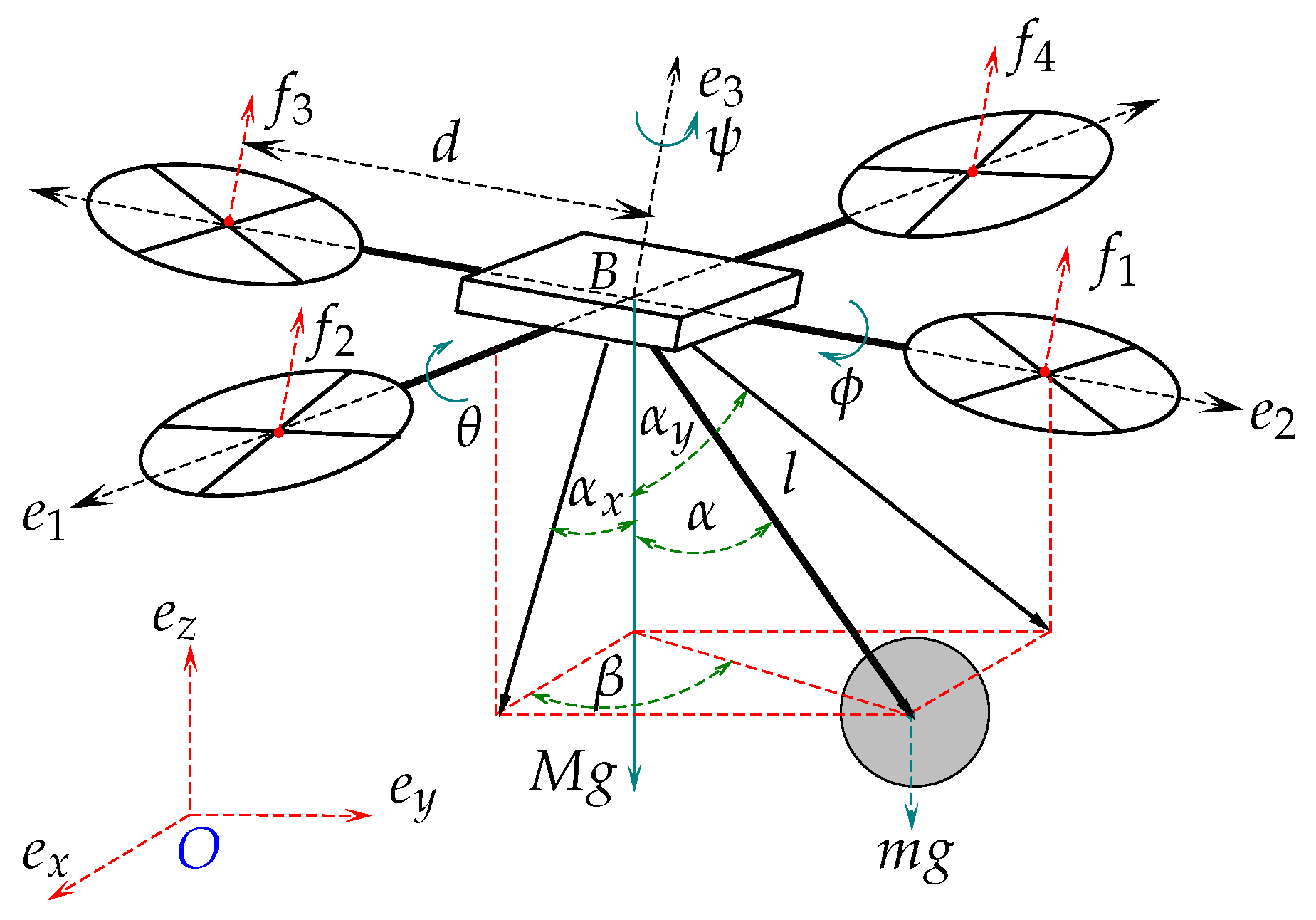
In this section, we present the mathematical model of a quadrotor transporting a payload connected by a cable. The aim is to present a dynamic model that mathematically describes the relationship between the quadrotor, the cable, and the payload. For this purpose, consider a rigid body with mass
m, being transported by a quadrotor as shown in
Figure 1. Note that in addition to the six DOFs of the UAV, the payload adds another two DOFs, resulting in a system with eight DOFs and four inputs.
The following assumptions were made for modeling the quadrotor with a cable-suspended payload:
- (a)
The cable is attached to the center of mass of the quadrotor and the air drag is negligible.
- (b)
The cable connecting the payload and the quadrotor fuselage is considered rigid, massless, and inelastic.
- (c)
The payload can be considered as a mass point.
- (d)
Mass distribution of the quadrotor is symmetrical in the x-y plane.
As shown in
Figure 1, the body-fixed frame is defined by
and the inertial frame by
. The location of the mass center of the vehicle relative to
O is represented by
, the attitude of the quadrotor is denoted by
(i.e., yaw, pitch, and roll, respectively).
defines the payload swing angle in space and has two components
and
,
.
is the swing angle projected on the
plane and
is the swing angle projected on the
plane,
represents the angle of the
X axis and the projected line of the cable to the
Y plane. Thus, the state vector is denoted by
. The control input is represented by
, where
defines the total thrust magnitude and
denotes the input torques.
The mass of the quadrotor and the payload are defined by M and m, respectively. The length of the cable is represented by l, the gravitational acceleration by g. Finally, the distance between the motors and the gravity center is equal to d.
In this work, the system is modeled using the Euler–Lagrange formulation.
2.1. Euler–Lagrange Formulation
Let
be the payload position in the inertial frame. Thus, the quadrotor and payload positions are related by
where
The equations of motion are obtained using the Euler–Lagrange method. The kinetic energy of the payload-quadrotor system is given by
where
is a symmetric positive definite constant inertia matrix of the quadrotor with respect to
B.
The total potential energy is defined by
From (
1) and (
2), the Lagrangian is given by
Using the Lagrangian and the derived formula for the equations of motion:
where
denotes the inertia matrix, which is symmetric and positive definite,
the Coriolis and centrifugal matrix,
the gravitational vector, and the matrix
is determined by the manner in which the control
is the input of the system. These matrices are defined as
where
,
.
We can see in the above expressions that the cable-suspended payload affects the translational motion, but the rotational motion is not affected. Then, the vehicle attitude dynamics is decoupled from the payload–quadrotor translational dynamics. Thus, the quadrotor with a cable-suspended payload model can be divided into payload–quadrotor translational and quadrotor rotational dynamics. The following subsections show the translational and rotational dynamics.
2.2. Translational Dynamics
From (
1) the model considering the translational motion is
where
,
, the matrices are given by
where
,
.
2.3. Rotational Dynamics
From (
1) the model considering the rotational motion is
where
where
is the rotational moment of inertia.
3. LMI-Based Approach for Lipschitz Nonlinear Systems
In this section, we propose a nonlinear state feedback controller based on a linear matrix inequality to stabilize the quadrotor rotational dynamics.
Taking the state vector of the attitude dynamics as
, one obtains
Therefore, we can represent the rotational dynamics as a particular nonlinear system of the form
where
A and
B are constant matrices,
B is chosen such that
is controllable, and
denotes the nonlinearities of the system. The parameters are given by:
Now, we consider that the following assumptions and lemmas are accomplished.
Assumption 1. The function is Lipschitz w.r.t. δ, with a Lipschitz constant γ, if: Lemma 1. Let be continuous for some domain . Suppose that exists and is continuous on . If, for a convex subset W , there is a constant 0 such thaton W, thenfor all t , W, and W. Lemma 2. If and (δ,t) are continuous on , then φ is globally Lipschitz in δ on if and only if (δ,t) is uniformly bounded on .
Lemma 3. If and (δ,t) are continuous on , for some domain , then φ is locally Lipschitz in δ on [
25].
Assumption 2. For a and and we have 3.1. Classical LMIs for the Quadrotor’s Orientation
We propose a controller based on an LMI. Firstly, one introduces a classical LMI approach, which states the following lemma.
Lemma 4. Consider system (10) and Assumption 1. Assume also that the nonlinearity φ is locally Lipschitz (Lemma 3) with Lipschitz constant γ (Lemma 1). Then, there exist a constant , matrices , and W with appropriate dimensions such that the following LMI is satisfied:with the feedback gain . The system (10) is exponentially stable when the control input is . We now need to obtain the value of the Lipschitz constant
γ of the nonlinearities of the rotation system function
. From the rotational dynamics model (
10), the function
is given by
We are interested in calculating a Lipschitz constant for
over the convex set
Applying Lemma 1, one gets:
The velocities are bounded as
rad/s because the rotors are driven by DC permanent magnet motors, which support a maximum voltage of 9 V. This implies that the torque input vector
τ is bounded and that the rotation speed capability of the motors has a maximum. When 9 V is applied to the motor the angular speed reaches
rad/s. Considering these bounded values and the values of the
Table 1, we can compute the Lipschitz constant as
. Then,
φ is locally Lipschitz.
With
, we try to solve the LMI (
13) using the LMI Toolbox
® in MATLAB
® software. However, the LMI is infeasible. It may happen that the classical LMI controller can deal with the problem only for smaller values of the Lipschitz constant. Thus, we propose an LMI following some ideas from [
26]. The LMI presented in [
26] is conceived for observer design. The new LMI design techniques are significantly less conservative than the classical LMI design technique.
3.2. Rotational Subsystem Control
Based on the linear-state-feedback approach, the control law for the attitude dynamics is
. Therefore, the orientation dynamics can be constructed as follows:
The goal is to find a suitable
B and
K, such that
. Thus, the attitude error dynamics
is represented as:
The following assumptions are needed for the derivation of the control law.
Assumption 3. There exists a matrix G with appropriate dimensions such that: This matrix G is a sparsely populated matrix. can be much smaller than the constant used earlier in Equation (11) for the same nonlinear function. Let us now consider a larger Lipschitz constant of the nonlinear system. We can achieve a state feedback controller that is able to bring the state of the nonlinear system to the desired state . This controller is given in the following statement:
Theorem 1. For attitude error dynamics (15), assume that Assumption 1, Lemmas 1 and 3 are satisfied and there exist a constant , matrices , and W with suitable dimensions, such that the following LMI holds:where denotes an identity matrix with appropriate dimensions, is a constant, and , the matrix K is a suitable feedback gain. Then, system (15) is exponentially stable, implying that the systems (10) and (14) are exponentially stable, then . Proof. Define the Lyapunov function
. From the trajectory error (
15), one gets:
From Assumption 3, one gets:
According to Assumption 2,
and
, one can rewrite (
19) as follows:
Now, replacing (
20) into (
18), one gets:
If
, where
, one can rewrite (
21) as:
Indeed, the attitude error dynamics (
15) is exponentially stable, and hence the two coupled systems (
10) and (
14) are exponentially stable. Using the Schur complement, Equation (
22) can be easily represented in an LMI as:
Multiplying the above inequality by
from the left-hand and right-hand sides, respectively, and letting
,
, and
, then the above inequality is further transformed into the following LMI:
If suitable
matrix and
W are selected such that the LMI (
17) is satisfied, then the attitude error dynamics (
15) with the feedback gain
is exponentially stable, implying that the coupled systems (
10) and (
14) are exponentially synchronized. □
Now, we apply the main result of this paper (Theorem 1) to system (
10). Then, we compute a controller for the rotational dynamics of the vehicle with guaranteed stability. Using Theorem 1, the LMI is then solved to obtain the control gain matrix
K with
,
, and
. Therefore, one easily obtains
K from (
24) by using the MATLAB
® LMI Toolbox
®:
The results of the state feedback controller with the gain matrix (
25) are shown in
Figure 2 and
Figure 3.
Figure 2 displays the quadrotor attitude (roll, pitch, and yaw) with
. Note that the stabilization time is about
s, thus the state feedback controller with the gain matrix K calculated by LMI provides good transient performance.
Figure 3 shows the input torques. Here we can observe that they are smooth.
5. Numerical Simulations and Results
In order to check the performance of the designed control scheme, some simulations were carried out. The objective was to move the vehicle transporting a payload to the desired position of a square of 1 m length at 1 m height. The desired trajectory is then defined by,
The values of the model parameters used for the simulation were the following: kg, kg, m, m/s.
These parameters are close to real aerial platforms. The corresponding simulation results are presented in the following figures.
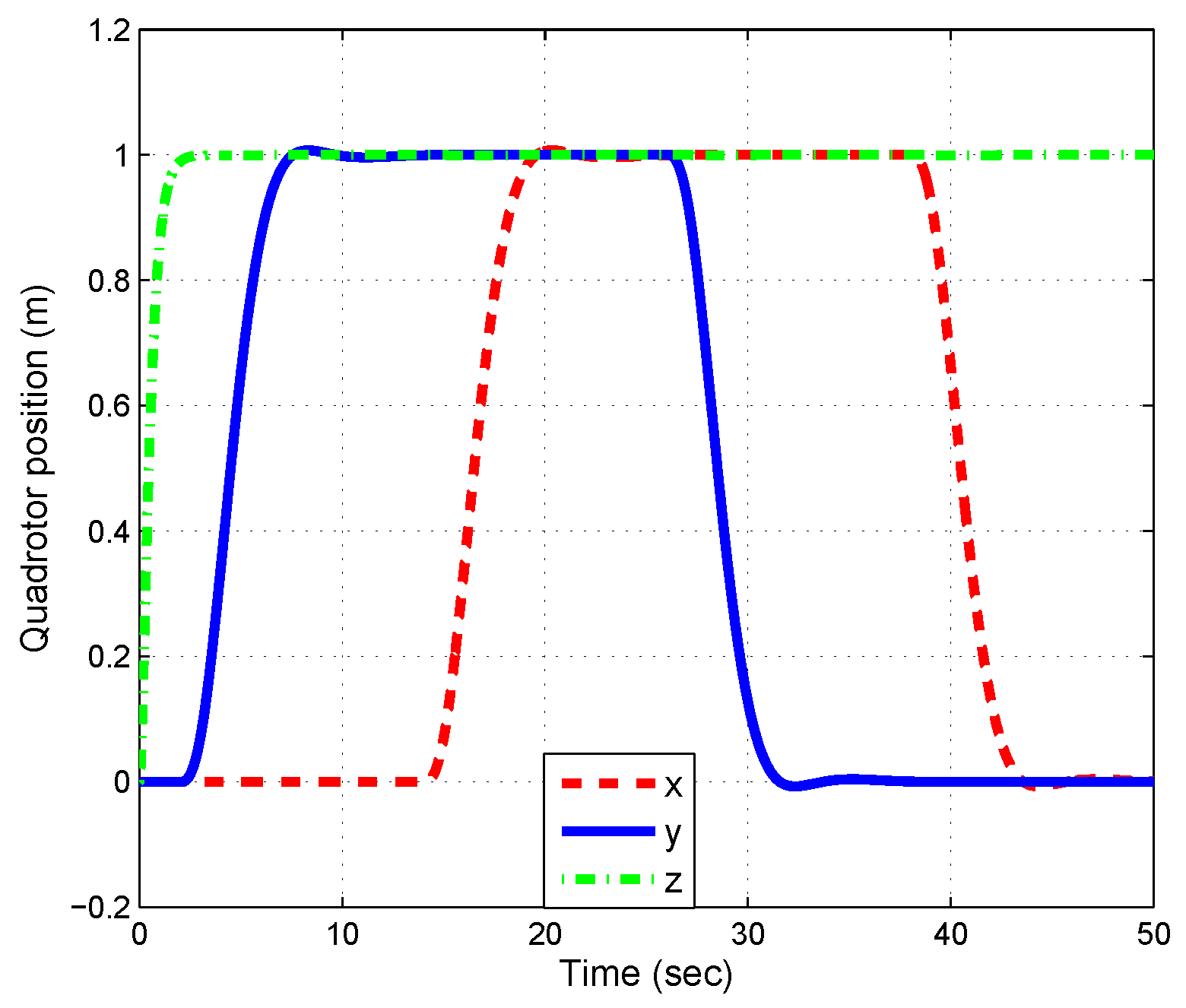
Figure 5 illustrates the
x,
y, and
z positions of the vehicle during the validation. We can see that the position for each axis was stabilized according to the desired reference points. The position
z was regulated in less than 2 s, the performance of the
x and
y positions dynamics were similar and were regulated in less than 5 s.
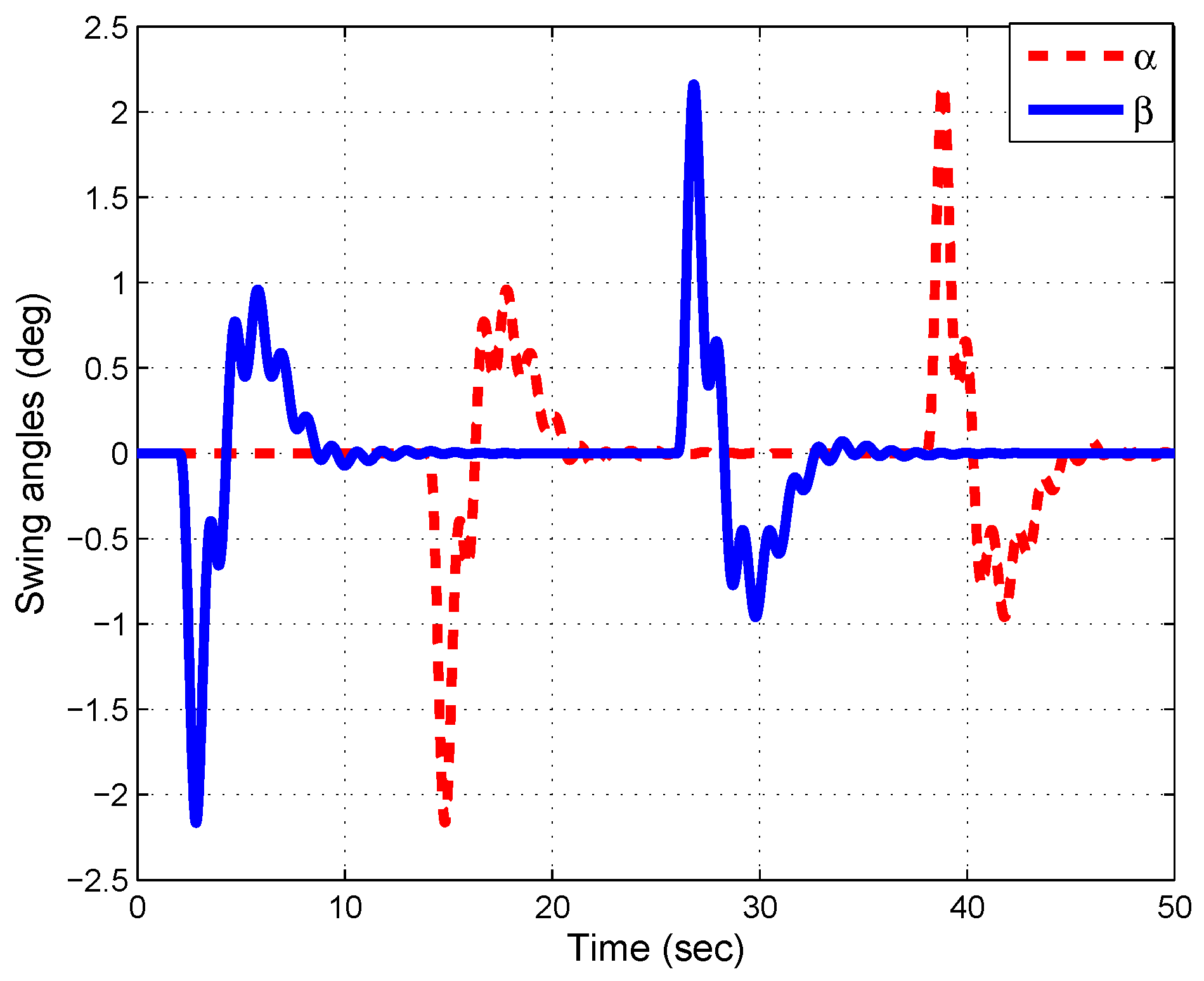
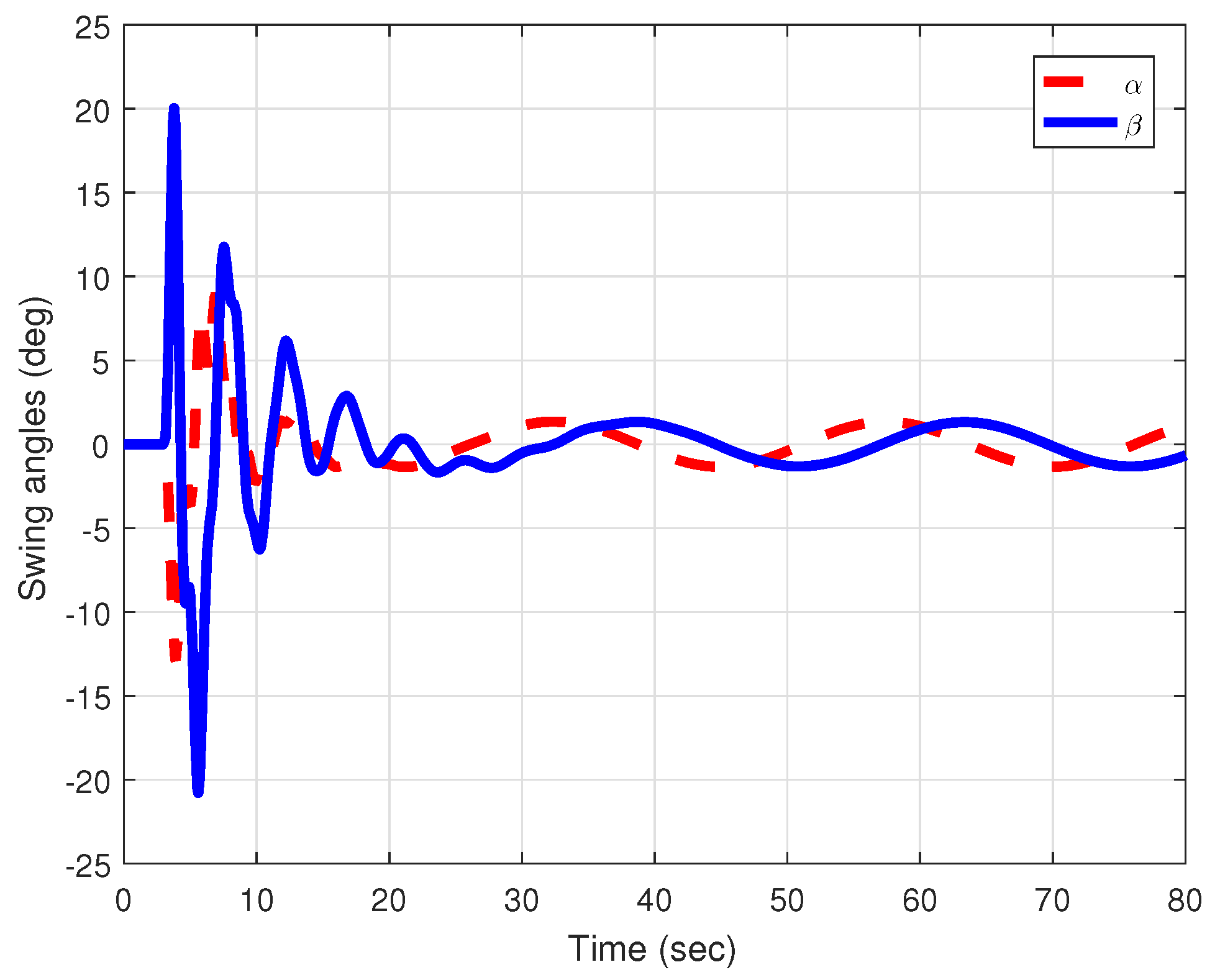
Figure 6 displays the payload swing angles
α and
β. It is clear that the proposed control law exhibited good performance, since the payload swing angles were regulated to
at around 5 s and the maximum overshoot was ±
.
The simulation results of the feedback controller based on LMI (inner-loop of the system) show the quadrotor’s orientation dynamics in
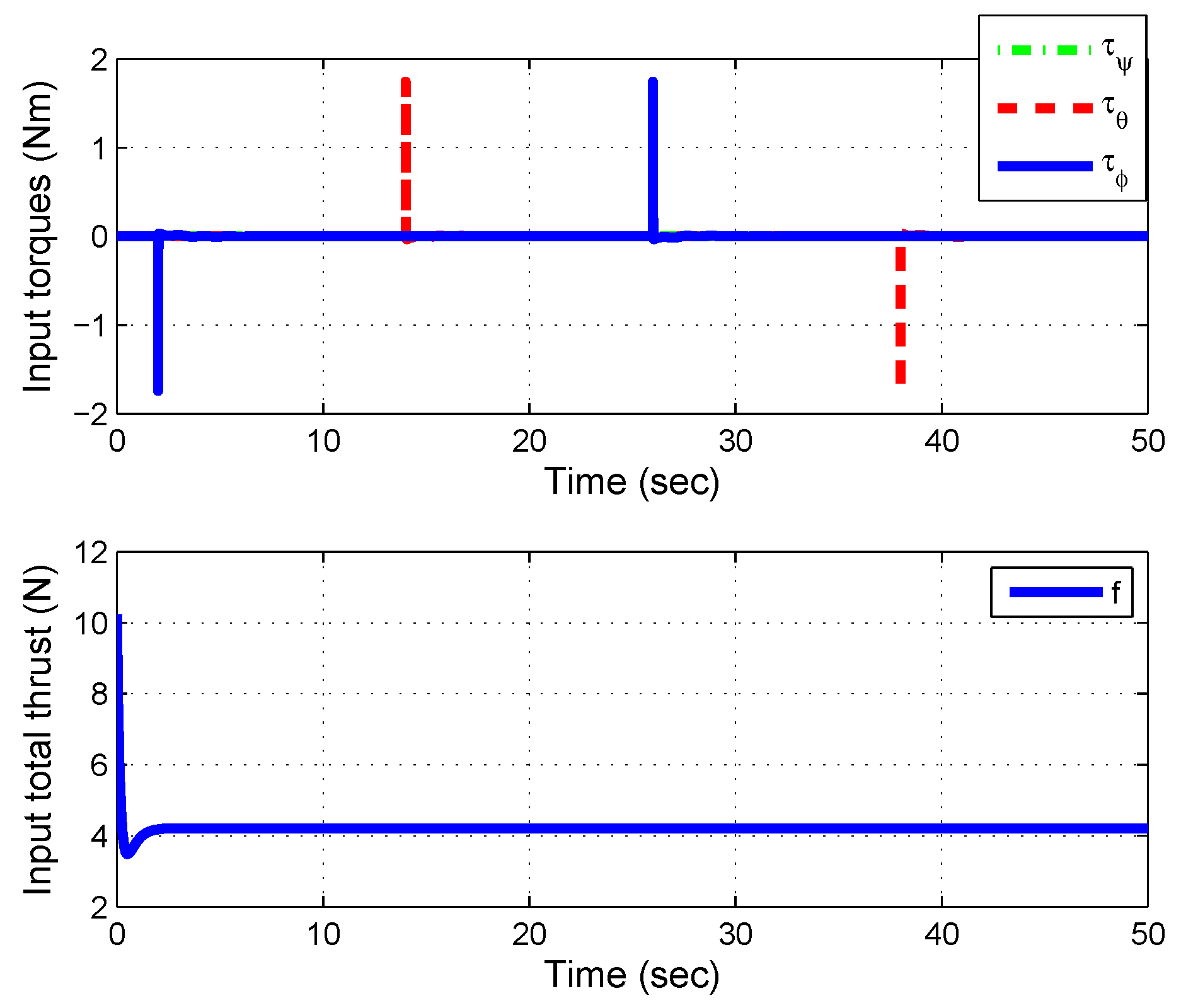
Figure 7. We can see that the attitude converged to the desired points with a null steady-state error. The evolution of the control inputs
f,
,
, and
are presented in
Figure 8. Finally, a three-dimensional view of the path followed by the vehicle is depicted in
Figure 9.
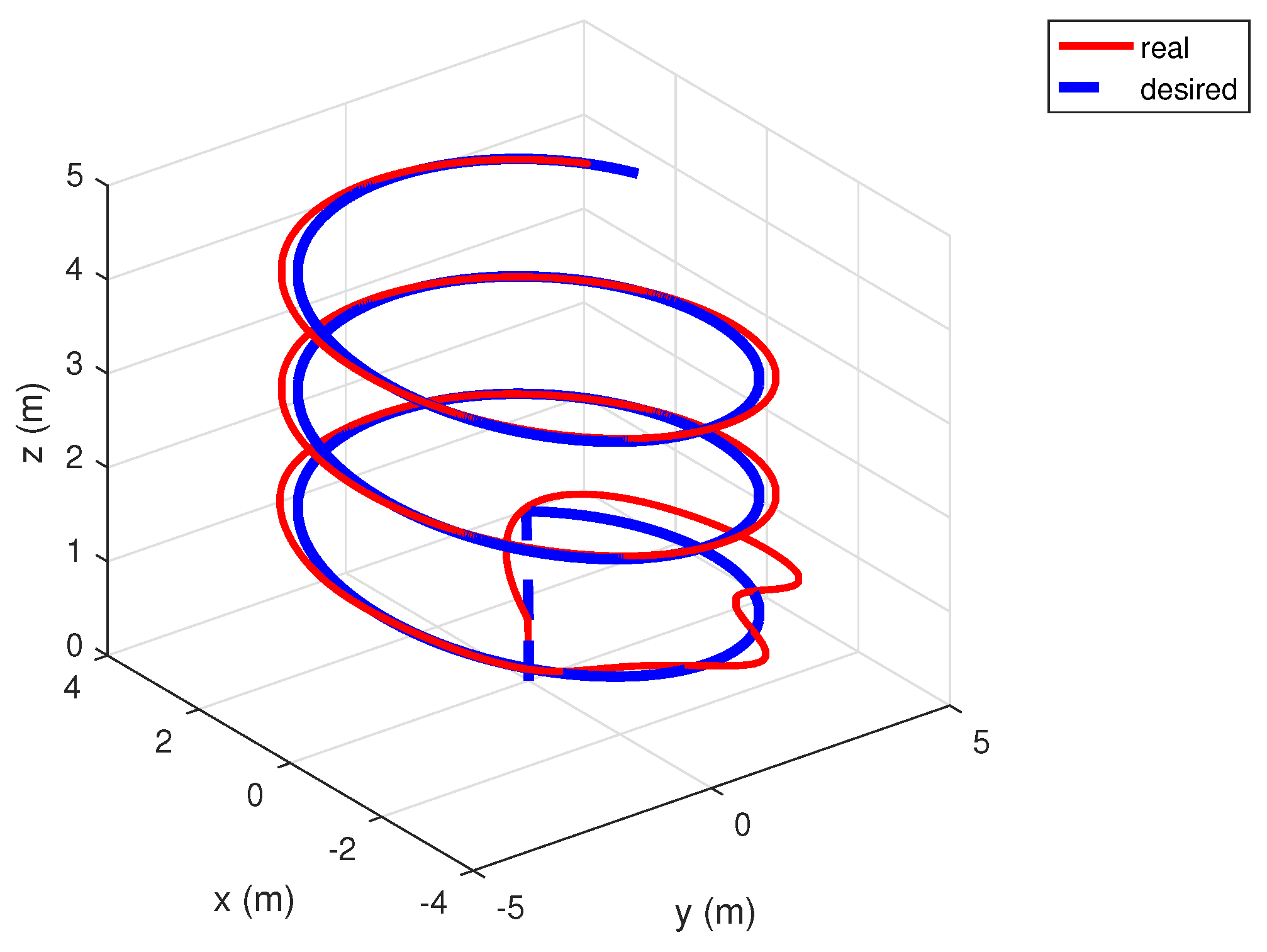
One more numerical experiment was carried out.
Figure 10,
Figure 11,
Figure 12 and
Figure 13 illustrate the tracking of an ascending circular trajectory to prove the efficiency of the proposed controller in a scenario that involves simultaneous variations of both
α and
β angles. These figures show that the proposed control strategy was capable of achieving accurate trajectory tracking since the aircraft converged to the reference trajectory while attenuating the swing angles of the payload.
In summary, these numerical experiments show that the proposed control scheme presented a satisfactory performance in position control and the attenuation of cable-suspended payload swing. It succeeded in transporting the payload to a desired position with attenuation of the oscillation angles. In contrast, the algorithm of [
18] involves solving complicated partial differential equations for obtaining the control law, and they cannot be solved for the 3D case.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}