1. Introduction
The celebrated
Feller equation was introduced in two seminal papers published by William
Feller (1951/1952) in Annals of Mathematics [
1,
2]. These publications studied mathematically (and, henceforth, gave the name) the following equation (To be more accurate, W.
Feller studied the following equation [
1]:
where
and
.).
where the subscripts
,
x denote the partial derivatives, i.e.,
,
. Two parameters
and
can be time-dependent in some physical applications, even if in this study we assume they are constants, for the sake of simplicity (The numerical method we are going to propose can be straightforwardly generalized for this case when
and
. Moreover,
Feller’s processes with time-varying coefficients were studied recently in [
3].). Equation (
1) can be seen as the
Fokker–
Planck (or the forward
Kolmogorov) equation, with
being the drift and
being the diffusion coefficients (see [
4] for more information on the
Fokker–
Planck equation). One can notice also that Equation (
1) becomes singular at
and
. We remind that practically important solutions to
Feller’s equation might be unbounded near
. In order to attempt solving Equation (
1), one has to prescribe an initial condition
, presumably with a boundary condition at
. A popular choice is to prescribe the homogeneous boundary condition
. For this choice of the boundary condition, it is not difficult to show that the
Feller equation dynamics would preserve solution positivity provided that
(see
Appendix A for a proof). The solution norm is also preserved (see
Appendix B). Moreover, using the
Laplace transform techniques,
Feller has shown in [
1] that the initial condition
determines uniquely the solution. In other words,
no boundary condition at
should be prescribed. This conclusion might appear, perhaps, to be counter-intuitive.
The great interest in
Feller’s equation can be explained by its connection to
Feller’s processes, which can be described by the following stochastic differential
Langevin equation (The stochastic differential equations are understood in the sense of
Itō.):
where
is the standard
Wiener process, i.e.,
is zero-mean
Gaussian white noise, i.e.,
where the brackets
denote an ensemble averaging operator. Then, the Probability Density Function (PDF)
of the process
, i.e.,
satisfies Equation (
1) with the following initial condition [
5]:
The point
is a singular boundary that the process
cannot cross. The
Feller process is a continuous representation of branching and birth–death processes, which never attains negative values. This property makes it an ideal model not only in physical, but also in biological and social sciences [
3,
6,
7].
As a general comprehensive reference on generalized
Feller’s equations, we can mention the book [
8]. Since at least a couple of years ago there has again been a growing interest for studying Equation (
1). Some singular solutions to
Feller’s equation with constant coefficients were constructed in [
6] via spectral decompositions.
Feller’s equation and
Feller’s processes with time-varying coefficients were studied analytically (always using the
Laplace transform) and asymptotically in [
3].
The
Feller (and
Fokker–
Planck) equation ’has already made its appearance in optical communications [
9]. Recently, the
Feller equation was derived in the context of the weakly interacting random waves dominated by four-wave interactions [
10]. Wave Turbulence (We could define the Wave Turbulence (WT) as a physical and mathematical study of systems where random and coherent waves coexist and interact [
11].) WT is a common name for such processes [
11]. In WT, the
Feller equation governs the PDF of squared
Fourier wave amplitudes, i.e.,
. In [
10], some steady solutions to this equation with finite flux in the amplitude space were constructed (There is probably a misprint in ([
10] p. 366). To obtain mathematically correct solutions, one has to define
on the line below Equation (14)). See also [
12], Chapter 11 for a detailed discussion and interpretations. Recently, the
Feller equation has been studied analytically in [
13]. The authors applied the
Laplace transform to it in space (this computation can be found even earlier in [
1], Equation (3.1)) and the resulting non-homogeneous hyperbolic equation was solved using the method of characteristics along the lines presented in ([
1], Section §3) (see ([
1], Equation (3.9)) for the general analytical solution).
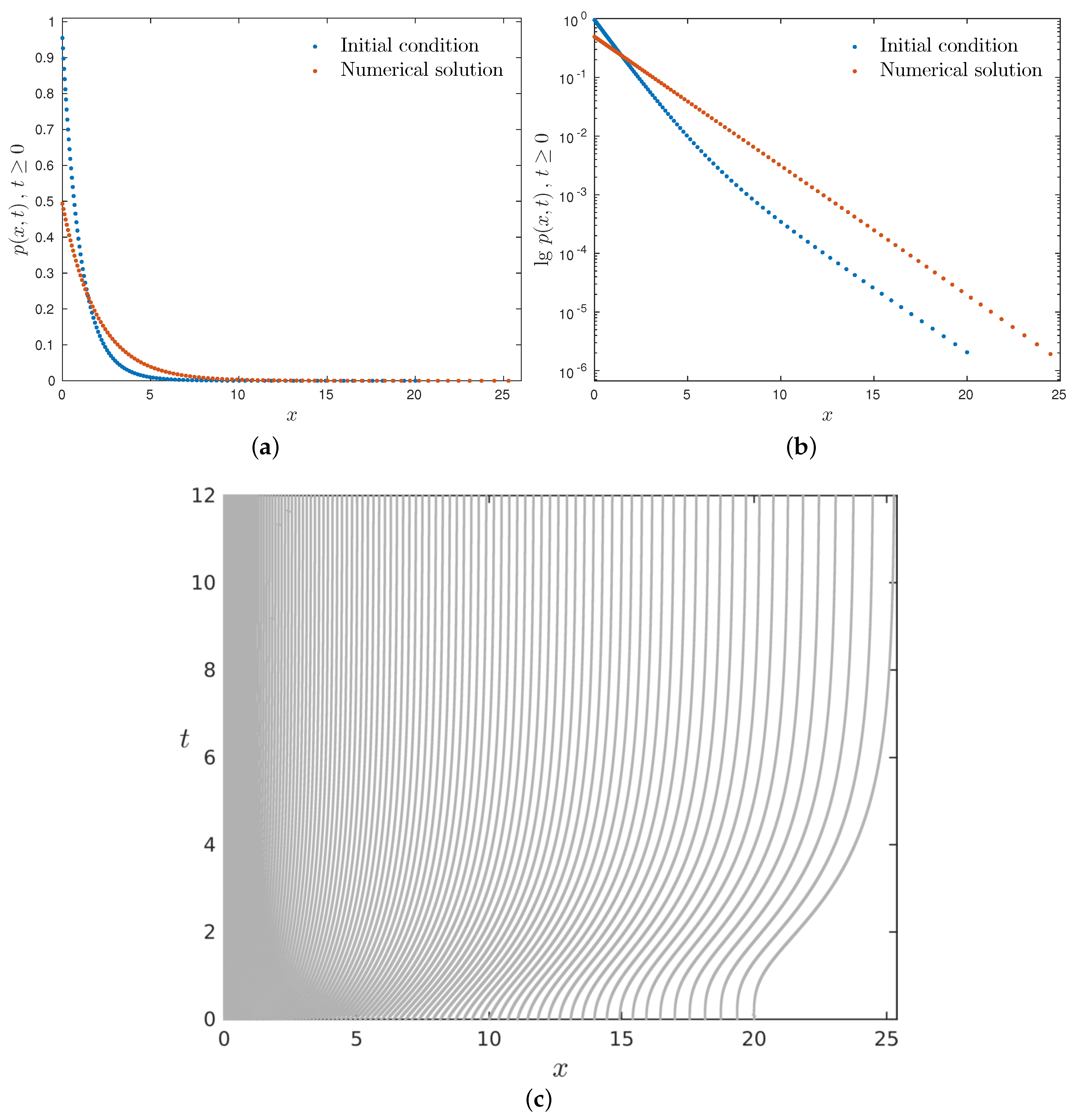
The behaviour of solutions
for large
x describes the appearance probability of extreme waves. In the context of ocean waves, these extreme events are known as
rogue (or
freak) waves [
14]. In the WT literature, any noticeable deviation from the
Rayleigh distribution for
is referred to as the
anomalous probability distribution of large amplitude waves [
10]. For
Gaussian wave fields, all statistical properties can be derived from the spectrum. However, the PDFs and other higher order moments are compulsory tools to study such deviations.
The present study focuses on the numerical discretization and simulation of
Feller equation. The naive approach to solve this equation numerically encounters notorious difficulties. The first question that arises is what is the (numerical) boundary condition to be imposed at
? Moreover, one can notice that Equation (
1) is posed on a semi-infinite domain. There are three main strategies to tackle this difficulty:
Map on a finite interval ;
Use spectral expansions on (e.g., Laguerre or associated Laguerre polynomials);
Replace (truncate) to , with .
In most studies, the latter option is retained by imposing some appropriate boundary conditions at the artificial boundary
. In our study, we shall propose a method that is able to handle the semi-infinite domain
without any truncations or simplifications. Finally, the diffusion coefficient in the
Feller Equation (
1) is unbounded. If the domain is truncated at
, then the diffusion coefficient takes the maximal value
, which depends on the truncation limit
L and can become very large in practice. We remind also that explicit schemes for diffusion equations are subject to the so-called
Courant–
Friedrichs–
Lewy (CFL) stability conditions [
15]:
Taking into account the fact that
can be arbitrarily large, no explicit scheme can be usable with
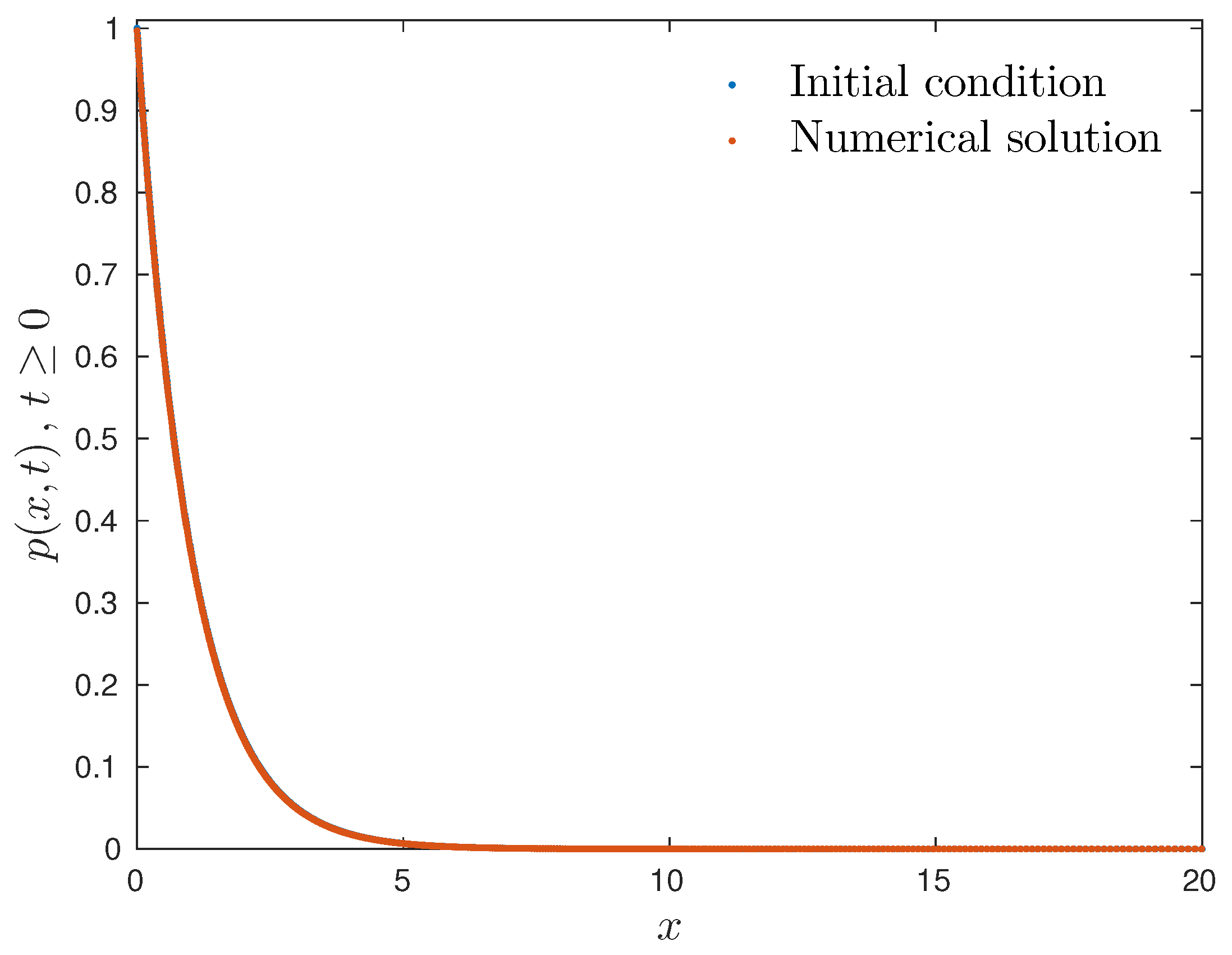
Feller equation in practice. Moreover, the dynamics of the
Feller equation spread over the space
even localized initial conditions. In general, one can show that the support of
,
is strictly larger (Using modern analytical techniques, it is possible to show even sharper results on the solution support, see e.g., [
16].) than the one of
. It is the so-called
retention property. Thus, longer simulation times require larger domains. For all these reasons, it becomes clear that numerical discretization of the
Feller equation requires special care.
In this study, we demonstrate how to overcome this assertion as well. The main idea behind our study is to bring together PDEs and Fluid Mechanics. First, we observe that the classical
Eulerian description is not suitable for this equation, even if the problem is initially formulated in the
Eulerian setting. Consequently, the
Feller equation will be recast in special
material or the so-called
Lagrangian variables (It is known that both
Eulerian and
Lagrangian descriptions were proposed by the same person, Leonhard
Euler), which make the resolution easier and naturally adaptive ([
17], Chapter 7).
The present manuscript is organized as follows. The symmetry analysis of Equation (
1) is performed in
Section 2. Then, the governing equation is reformulated in
Lagrangian variables in
Section 3. The numerical results are presented in
Section 4. Finally, the main conclusions and perspectives are outlined in
Section 5.
2. Symmetry Analysis
In general, a linear PDE admits an infinity of conservation laws, with integrating multipliers being solutions to the adjoint PDE [
18]. Here, we provide an interesting conservation law, which was found using the
GeM Maple package [
19]:
where
is the so-called
exponential integral function [
20] and the flux 𝔊 is defined as
The symmetry group of point transformations can be computed using
GeM package as well. The infinitesimal generators are given below:
where
,
and
are
Kummer special functions [
20,
21] (see also
Appendix C). The corresponding point transformations, which map solutions of (
1) into other solutions, can be readily obtained by integrating several ODE systems (we do not provide integration details here):
The first symmetry is the time translation. The second one is the scaling of the dependent variable (the governing equation is linear). Symmetries 3 and 4 are exponential scalings. Two last symmetries express the fact that we can always add to the solution a particular solution to the homogeneous equation to obtain another solution. For instance, the solutions invariant under time translations (
) are steady states and their general form is the following:
where
are ‘arbitrary’ constants, which have to be determined from imposed conditions. Of course, they should be chosen so that the resulting steady solution is a valid probability distribution. It is not difficult to check that the imposed flux
on the steady state solution is equal to
. Some properties of the exponential integral function are reminded in
Appendix D.
We provide here also the general solutions invariant under the symmetry
:
and under symmetry
:
These solutions might be used, for example, to validate numerical codes.
Remark 1. As a byproduct of this analysis, we obtain two new exact solutions to theFellerEquation (1):for some constant . 3. Reformulation
By following the lines of ([
17], Chapter 7), we are going to rewrite
Feller’s Equation (
1) with the so-called
Lagrangian or
material variables. The main advantage of this formulation is due to the fact that we can handle infinite domains
without any truncations, transformations, etc. It becomes possible to carry computations in infinite domains. Our domain is semi-infinite (
), with the left boundary
being a reflection point.
As the first step, we introduce the distribution function associated to the probability density
:
The same can be done for the initial condition as well:
We notice also two obvious properties of the function
:
Due to the positivity preservation property (see
Appendix A), the function
is nondecreasing in variable
. Thus, we can define its pseudo-inverse (This mapping is sometimes called in the literature as the
reciprocal mapping [
17] or an
order preserving string [
22].):
which can be computed as
The operation of taking the pseudo-inverse can be also seen as a generalized
hodograph transformation proposed presumably for the first time by Sir W.R.
Hamilton [
23]. Similarly, the initial condition does possess a pseudo-inverse as well:
such that
.
If
Feller Equation (
1) holds in the sense of distributions, then the following equation holds as well:
along with the initial condition
Equation (
5) can be readily obtained by exploiting the obvious property
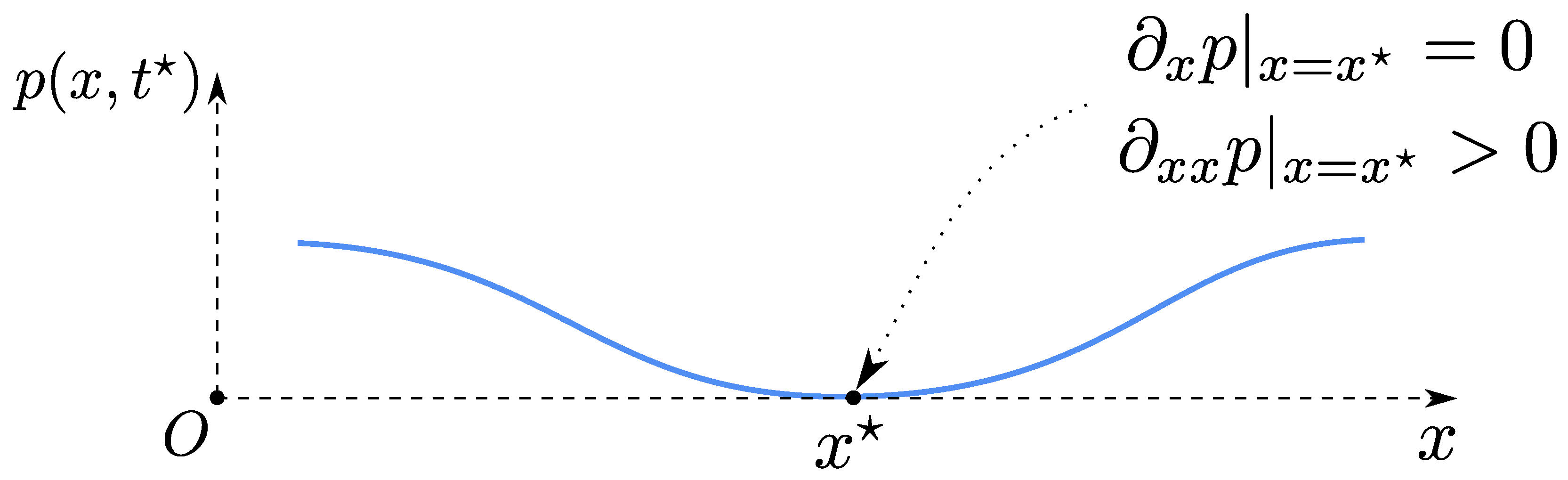
. In
Appendix A, we show that zero value of the solution
is repulsive. Thus,
,
. Thus, the implicit function theorem [
24,
25] guarantees the existence of derivatives of the inverse mapping
. Let us compute them by differentiating, with respect to
and
t, the following obvious identity:
Thus, one can easily show that
Using these expressions of partial derivatives, we derive the following evolution equation for the inverse mapping
:
The last equation can be rewritten also by introducing a new dynamic variable:
It is not difficult to see that Equation (
6) becomes
The last equation will be solved numerically in the following Section.
Remark 2. We would like to underline the fact that, by our assumptions, as well as cannot vanish. Thus, there is no problem in dividing by in Equation (8). Numerical Discretization
Earlier, we derived Equation (
6), which governs the dynamics of the pseudo-inverse mapping
. The initial condition for Equation (
6) is given by the pseudo-inverse (
4) of the initial condition
. We discretize Equation (
6) with an explicit discretization in time since it yields the most straightforward implementation.
The first step in our algorithm consists of choosing the initial sampling interval. We make this choice depending on the provided initial condition. Typically, we want to sample only where it is needed. Thus, it seems reasonable to choose the
initial segment
, with
being the leftmost location such that
In simulations presented below, we chose
. Then, we chose the initial sampling
, with
and
. It is desirable that the initial sampling be adapted to the initial condition, since errors made initially cannot be corrected later. One of the possible strategies for the initial grid generation can be found in ([
26], Section 2.3.1). We define also
. We stress that
stand for a discrete cumulative mass variable and, thus, they are time independent.
More generally, we introduce the following notation:
with
,
and
being a chosen time step. (We present our algorithm with a constant time step for the sake of simplicity. However, in realistic simulations presented in
Section 4, the time step will be chosen adaptively and automatically to meet the stability and accuracy requirements prescribed by the user.) We introduce also similar notation for the dynamic variable:
Now, we can state the fully discrete scheme for Equation (
8):
with
,
and
The quantity
can be defined as the arithmetic or geometric mean of two neighbouring discretization steps
:
To be specific, in our code, we implemented the arithmetic mean. The fully discrete scheme can be easily rewritten under the form of a discrete dynamical system:
Remark 3. We would like to say a few words about the implementation of boundary conditions. First of all, no boundary condition is required on the left side, where . On the right boundary, we prefer to impose the infiniteNeumann-type boundary condition (i.e., ), which yields the exact ‘mass’ conservation at the discrete level as well. Namely, at the rightmost cell, we have the following fully discrete scheme:with . As a result, we obtain the exact conservation of ‘mass’ at the discrete level: To summarize, our numerical strategy consists of the following steps:
We compute the pseudo-inverse of the initial data to obtain .
This initial condition is evolved in (discrete) time using an explicit marching scheme in order to obtain numerical approximation to , .
The variable
is recovered by inverting (
7), i.e.,
Thanks to (
3), we can deduce the values of
by applying a favorite finite difference formula (In our code, we employed the simplest forward finite differences, and it led satisfactory results. This point can be easily improved when necessary.).
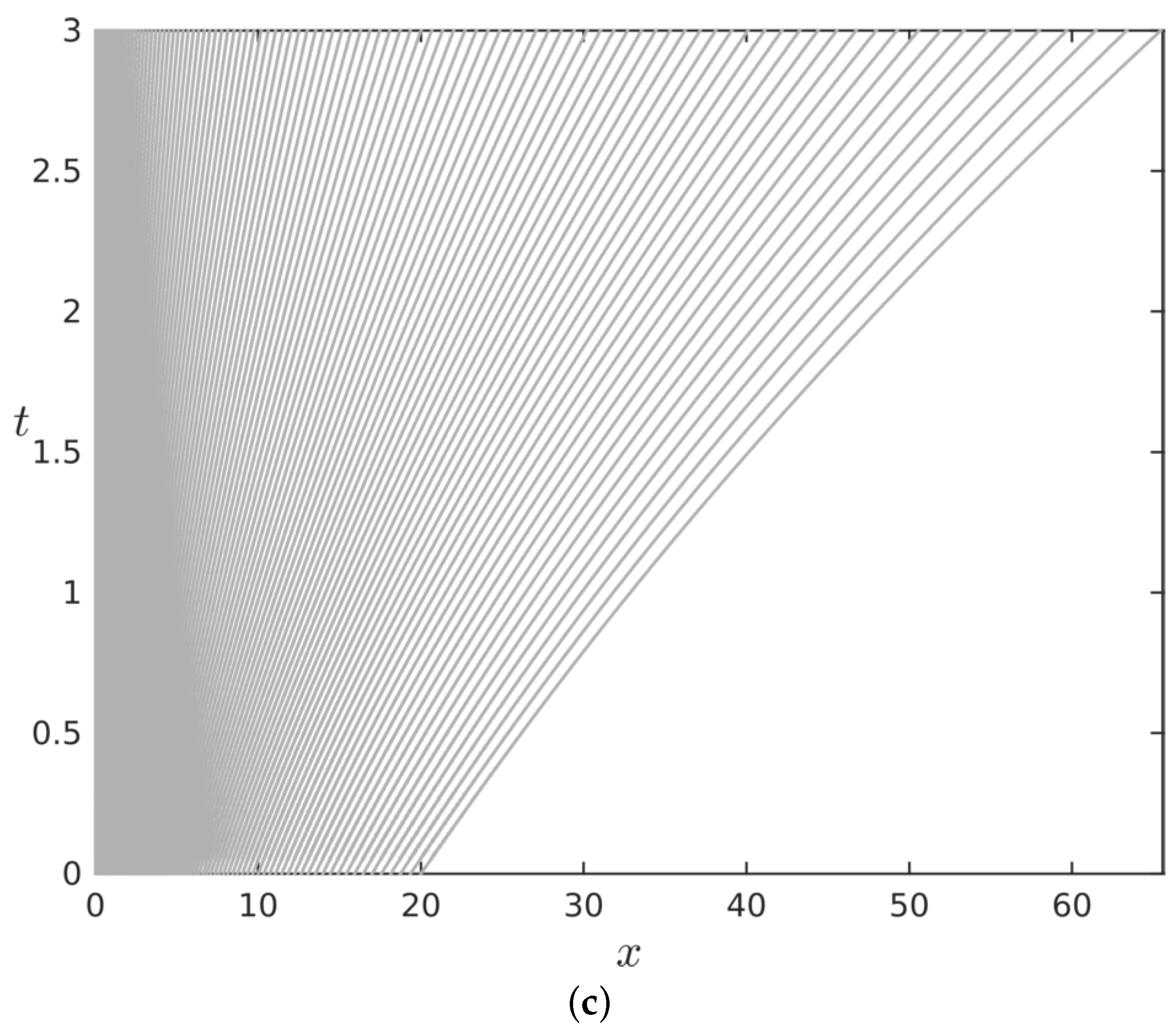
Working with the pseudo-inverse allows us to overcome the issue of the retention phenomenon, which manifests as the expanding support of
for positive (and possibly large) times
,
, since the computational domain was transformed to
. This method is the
Lagrangian counterpart of the moving mesh technique in the
Eulerian setting [
26,
27].
A simple
Matlab code, which implements the scheme we described above, is freely available for reader’s convenience at [
28].








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}