1. Introduction
Let
be a differentiable operator in the sense of Fréchet, where
and
are Banach spaces and
is a nonempty and open set. A plethora of problems from many diverse disciplines are formulated using modeling which looks like
Hence, the problem of locating a solution
for Equation (
1) is very important. Most people develop iterative algorithms approximating
under some conditions, since a closed form solution cannot easily be obtained in general. The most widely used iterative method is Newton’s method defined for an initial point
by
Numerous convergence results appear in the literature based on which .
In this article, we introduce new semilocal convergence results based on our idea of restricted convergence region through which we locate a more precise set containing . This way, the majorizing constants and scalar functions are tighter leading to a finer convergence analysis.
To provide the semilocal convergence analysis Kantorovich used the condition [
1]
Let function
be non-decreasing and continuous. A weaker condition is [
2,
3,
4,
5,
6]
We shall find a tighter domain than
, where Equation (
4) is satisfied. This way the new convergence analysis shall be at least as precise.
The layout of the rest of the article involves the semilocal convergence of Newton’s method (Equation (
2)) given in
Section 2. Some numerical examples are also given in
Section 2, whereas
Section 3 contains the work on Bratu’s equation.
2. Semilocal Convergence
Theorem 1 (Kantorovich’s theorem [
1])
. Let and be Banach spaces. Let also be a twice continuously differentiable operator in the sense of Fréchet where Ω
is a non-empty open and convex region. Assume:and there existswith,
,
, ,
,
, where.
Then, Newton’s sequence defined in Equation (2) converges to a solution of the equation . Moreover, , , for all Furthermore, the solution is unique in , where , if , and in , if , for some . Furthermore, the following error bounds holdandwhereand The Kantorovich theorem can be improved as follows:
Theorem 2. Let and be Banach spaces. Let be a twice continuously differentiable operator in the sense of Fréchet. Assume:
and there exists with ,
,
, ,
, ,
, where ,
, where .
Then, sequence generated by Method (2) converges to . Moreover, , , . Furthermore, the solution is unique in , whereand infor some . Furthermore, the following error bounds holdandwhereand Proof. The iterates stay in by the proof of the Kantorovich theorem, which is a more precise location for the solution than , since . □
Remark 1. If , Theorem 1 reduces to the Kantorovich theorem, where k is the Lipschitz constant for used in [1]. We get and so holds in general. Notice thatso the Newton–Kantorovich sufficient convergence condition has been improved and under the same effort, because the computation of k requires the computation of or as special cases. Moreover, notice that if provided that and of Theorem 2 holds on with replacing , then Theorem 2 can be extended even further with , , replacing and , respectively, since , so .
Concerning majorizing sequences, define
where
According to the proofs, and are majorizing sequences tighter than and , respectively, and as such, they converge under the same convergence criteria. Notice also that and .
Example 1. Let , , , and .
Case 1.. Then, we have thatandso We see that Kantorovich’s result [4] (see Theorem 1) cannot be applied, since Case 2.. Then, we getwhereso by Theorem 2, Newton’s method converges forsince Case 3. provided that . In this case, we obtain fromso Therefore, we must have thatandwhich are true for since , so . Hence, we have extended the convergence interval of the previous cases. The sufficient convergence criterion for the modified Newton’s method
is the same as the Kantorovich condition
. In [
7], though we proved that this condition can be replaced by
which is weaker if
. In the case of the example at hand, we have that this condition is satisfied as in the previous case interval. Therefore, by restricting the convergence domain, sufficient convergence criteria can be obtained for Newton’s method identical to the ones required for the convergence of the modified Newton’s method. The same advantages are obtained if the preceding Lipschitz constants are replaced by the
functions that follow.
It is worth noting that the center-Lipschitz condition (not introduced in earlier studies) makes it possible to restrict the domain from
to
(or
), where the iterates actually lie and where
can be used instead of the less tight estimate
used in Theorem 1 and in other related earlier studies using only condition
in Theorem 1.
Next, the condition
is replaced by
Next, we show how to improve these results by relaxing Equation (
5) using even weaker conditions
where
is a non-decreasing continuous function satisfying
. Suppose that equation
has at least one positive solution. Denote by
the smallest such solution.
Moreover, suppose that
or Equation (
6) and
where
,
are non-decreasing functions.
If function v is strictly increasing, then we can choose .
Notice that Equation (
5) implies Equations (
6) and (
7) or Equations (
6) and (
8) but not necessarily vice versa. Moreover, we have that
and
Next, we show that
or
can replace
in the results obtained in Reference [
4]. Then, in view of Equations (
9)–(
11), the new results are finer and are provided without additional cost, since
requires the computation functions
v,
and
as special cases. Notice that function
v is needed to determine
(i. e.,
and
) and that
and
.
3. Bratu’s Equation
Bratu’s equation is defined by the following nonlinear integral equation
where
,
and the kernel
T is the Green’s function
Observe that Equation (
12) can also be seen as the following boundary value problem [
8]:
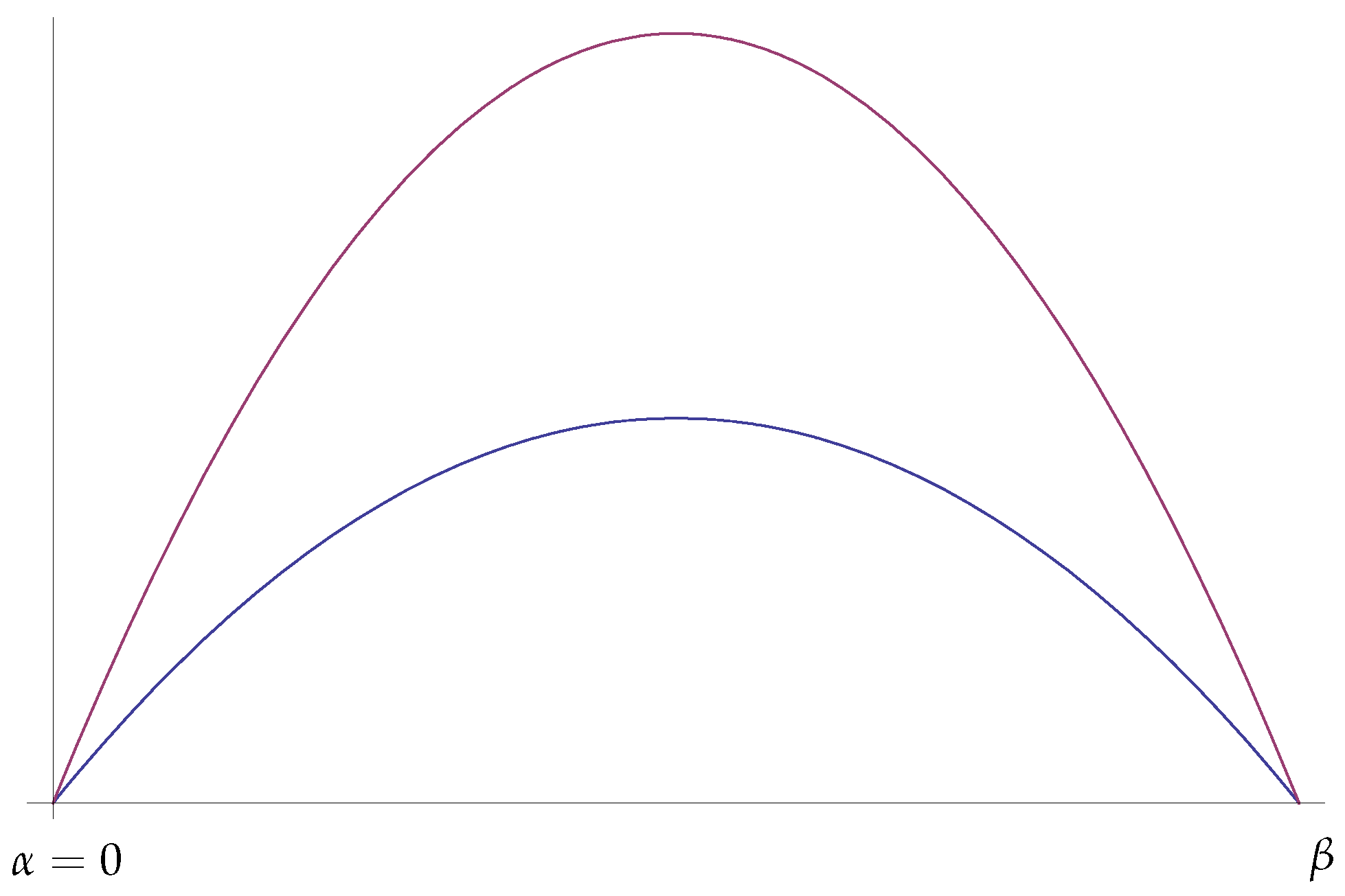
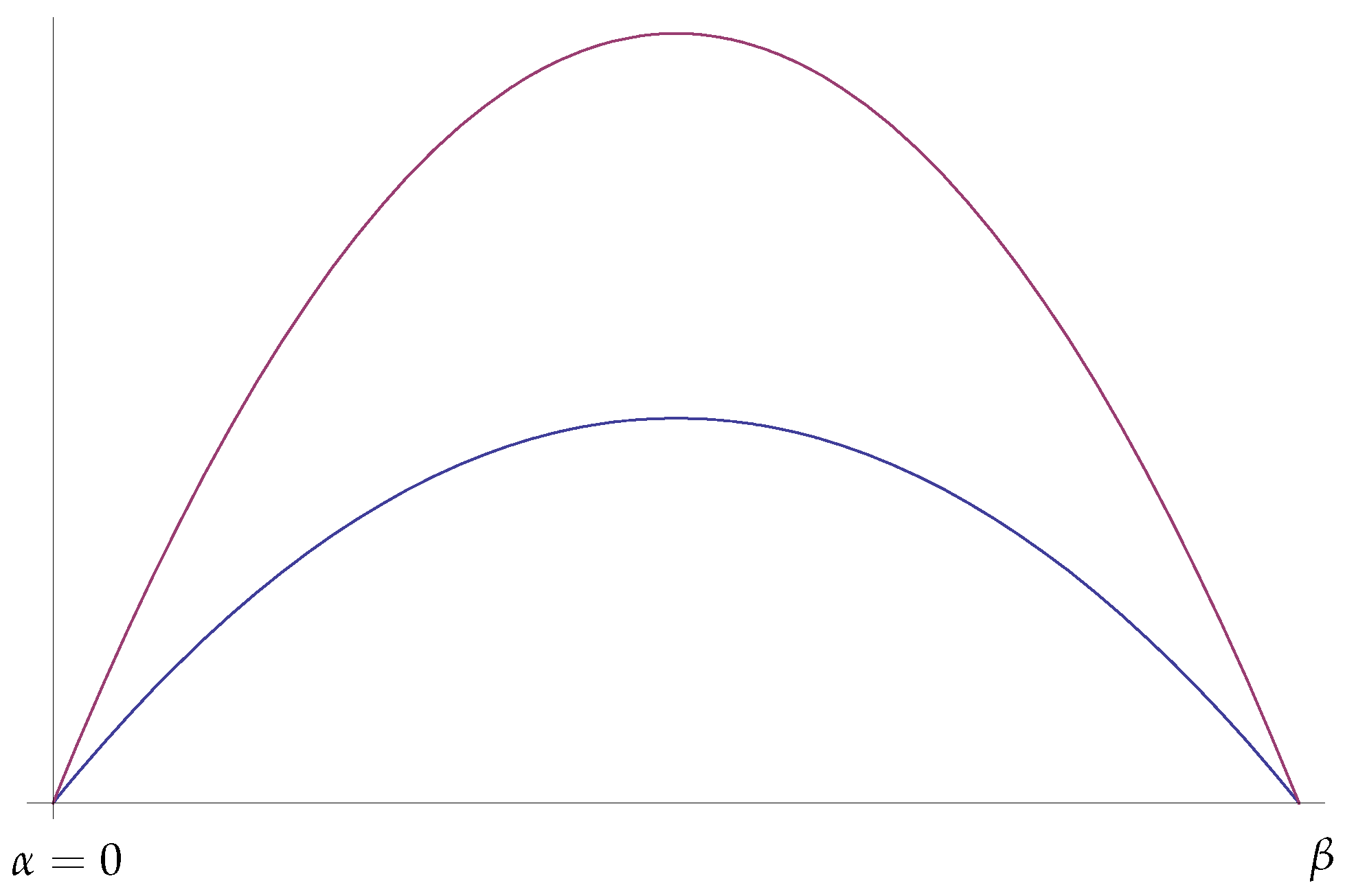
Let
and
. It follows from [
8] that Equation (
12) has two solutions such that
, provided that for for each
, where
. Next, we show a sketch of both solutions in
Figure 1.
Bratu’s equation appears in connection to many problems: combustion, heat transfer, chemical reactions, and nanotechnology [
9].
Using Newton’s method, we approximate the solutions of Bratu’s equation. Let
be defined by
But condition (
3) does not hold if operator (
13) is defined by Equation (
13), since
Therefore, it is clear that is not bounded in a general domain . However, it is hard to find a region containing a solution of and such that is bounded there.
Our aim is to solve
using Newton’s method
Using
m nodes in the Gauss-Legendre quadrature formula
where the nodes
and the weights
are known. We can write
or
where
We shall relate sequence
with its majorizing sequence
To achieve this using Equation (
16), we compute
,
and
where
,
, and
. Let
and let
be its closure.
Clearly, Theorems 1 and 2 hold if operator
F is defined by Equation (
16) and Newton’s method in the form of Equation (
14) is used.
We shall verify the hypotheses of these theorems, so we can solve our problem. To achieve this,
sets
and
where
and
. Moreover, we have
and
, where we used the infinity norm. Notice that
is not bounded, since
is increasing as a function of
. Hence, Theorem 1 or Theorem 2 cannot be used.
Remark 2. Notice that Kantorovich’s Theorem 1 cannot apply, although is Lipschitz continuous.
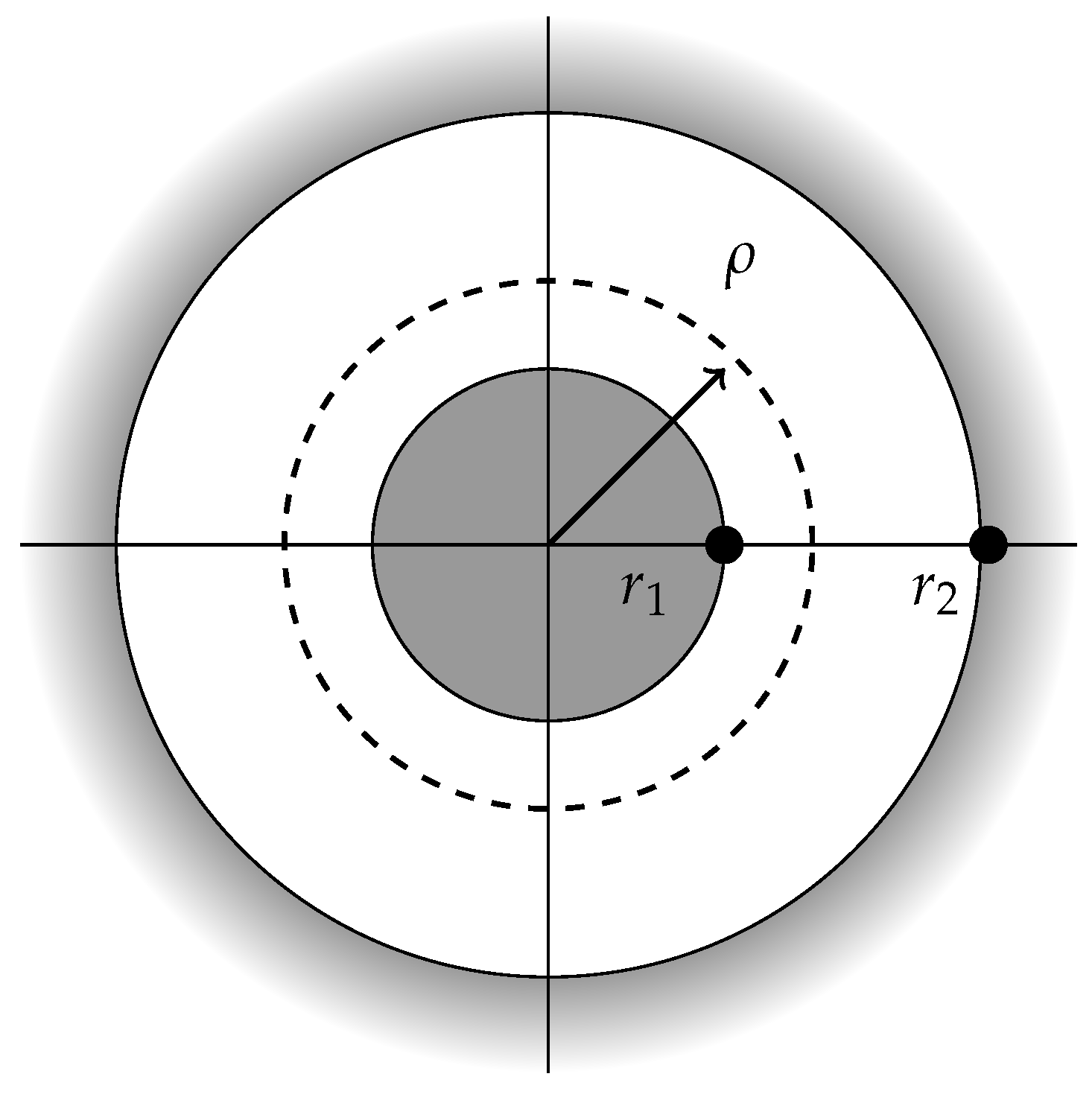
We look for a bound for
in such domain ([
6]). If
solves Equation (
16), we have
, where
and
(
) are roots of the scalar equation
. (See
Figure 2). We choose
such that
with
.
Example 2. Let us consider Bratu’s Equation (12) with , and to obtain and By choosing , , , we see that with so , The conditions of Theorem 2 hold.
Consequently, we obtain the solution after three iterations (see Table 1). Concerning Theorem 1, we defineas an auxiliary function to construct majorazing sequence . We also use the sequence Note then that , , and . We also obtain the a priori error estimates shown in Table 2, which shows that the error bounds are improved under our new approach. In this section, we consider the alternative to Equation (
4) condition
since
is non-decreasing. Then, we look for a function
The solution of Equation (
21) is given by
We suppose in what follows that
Otherwise, i.e., if , then the following results hold with replacing .
Notice that is the function obtained by Kantorovich if and , .
For Bratu’s equation, we have
and function (
22) is reduced to
with
and
defined in Equations (
17) and (
18), respectively. Next, we need the auxiliary results for function
.
Lemma 1. Let be the function defined in Equation (23) and Then:
is the unique minimum of in .
is non-increasing in .
If , the equation has at least one root in . If is the smallest positive root of , we have .
Next, we define the scalar sequence
Lemma 2. Ifwhere , are given in Equations (23) and (24), respectively, then sequence (25) is increasingly convergent to the smallest positive root of . We need an auxiliary result relating sequence to .
Lemma 3. Let . Let be the function defined in Equation (23) and in Equation (24). If condition (26) is satisfied, then , for , where is the smallest positive root of . Then, sequence (25) is majorizing for the sequence : Proof. We prove the following four items for all :
There exists such that ,
,
,
.
Secondly, from Taylor’s series and Equation (
14),
it follows that
since
.
Then, if – hold for all , we show in an analogous way that these items hold for too. □
The conditions shall be used:
and there exists such that ,
,
for ,
, where is the smallest root of the equation in .
Notice that is increasing and in , since , so that is strictly increasing in . Hence, with .
Theorem 3. Assume conditions – are satisfied. If condition (26) is also satisfied, Newton’s sequence given by Equation (14) converges to a solution of Equation (16). Moreover, and , for all , where is defined in Equation (25). Furthermore, if , the solution is unique in . Proof. Sequence converges, since is its majorizing sequence. Then, if , , for all . Moreover, the sequence is bounded. By the continuity of F, we have , since and .
To show the uniqueness of
, let
be another solution of Equation (
16) in
. Notice that
. From
it follows that
, provided that the operator
is invertible. To prove that
Q is invertible, we prove equivalently that there exists the operator
, where
. Indeed, as
so
exists. □
Remark 3. We have by Equation (22) that , where Remark 4. - (a)
If , the results in this study coincide with the ones in [4]. Moreover, if inequality in Equations (9)–(11) is strict, then, the new results have the following advantages: weaker sufficient convergence conditions, tighter error estimates on , and at least as precise information on the location of the solution . - (b)
These results can be improved even further, if we simply use the conditionand majorizing function (as in with , ) (also see the numerical section).
Remark 5. - (a)
It is worth noting that there are alternative approaches to the root-finding other than Newton’s method [10,11], where the latter one has cubic order of convergence, whereas Newton’s is only quadratic. - (b)
If the solution is sufficiently smooth, then one can use generalized Gauss quadrature rules for splines. This way, instead of projecting f into a space of higher-degree polynomials as is done in our article, one can project it to a spline space (see [12,13,14]). These quadratures in general do not affect the convergence order, but they do make the computation more efficient, since fewer quadrature points are required to reach a certain error tolerance.




{kind=link}
{kind=link}