
Semi-Global Polynomial Synchronization of High-Order Multiple Proportional-Delay BAM Neural Networks


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- This is the first study on the SGPS of multiple proportional-delay HOBAMNNs, and the definition of SGPS here is obviously different from that of GPS.
- (2)
- This paper proposes a direct derivation method based on the system’s solution. Different from previous research results, it avoids using nonlinear transformation to convert PDNNs into constant delay NNs. This method simplifies the research process, avoids the complexity brought by constructing the Lyapunov–Krasovskii functional, and makes the structure of the paper more reasonable.
- (3)
- The established SGPS criterion not only enhances the convergence rate and accuracy but also enables straightforward implementation using the MATLAB R2016b 9.1 toolbox.
2. Problem Description
3. Main Results
- (i)
- When , there is T and such that (11) is true, and
- (ii)
- When , there is T and such that (11) is true, and
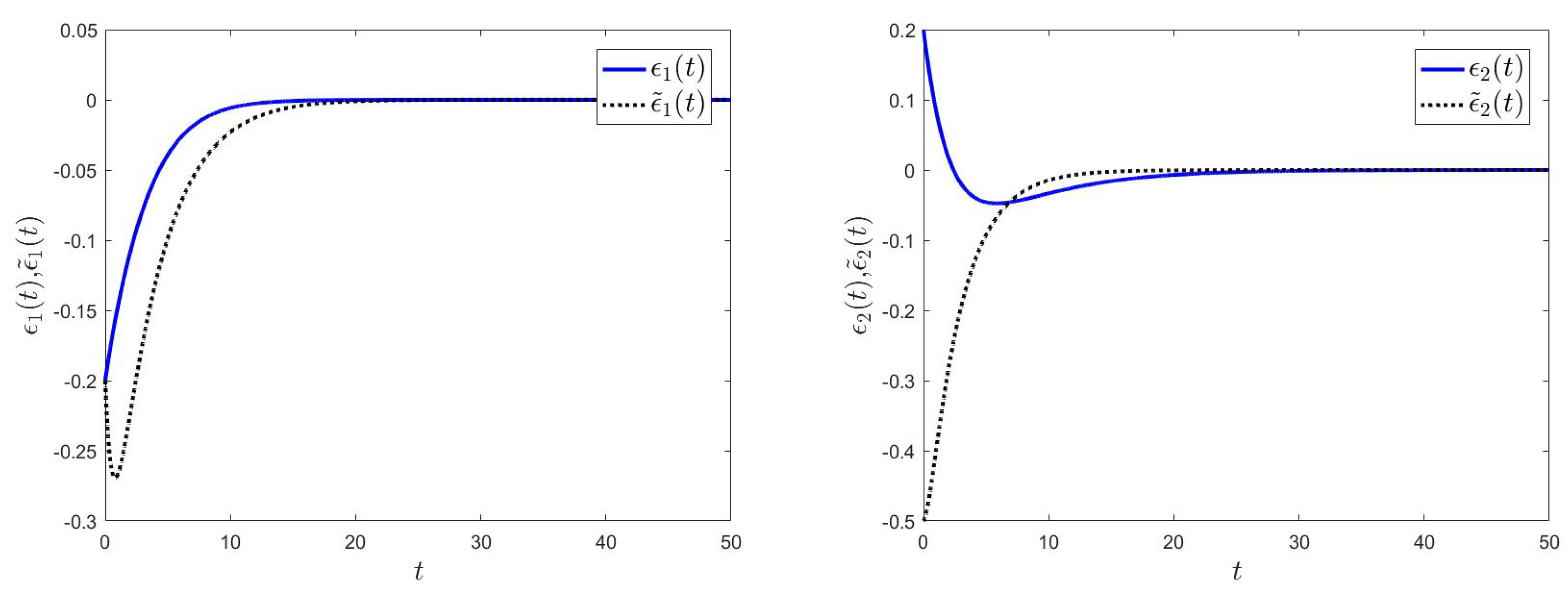
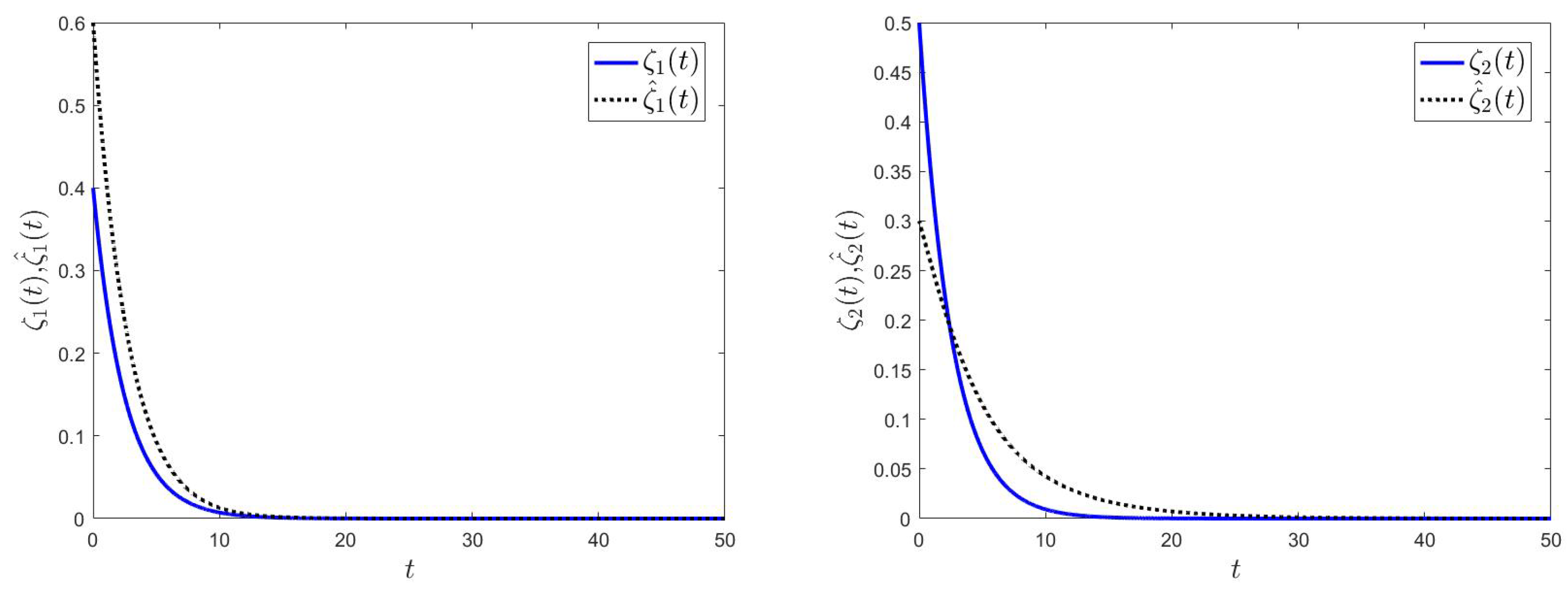
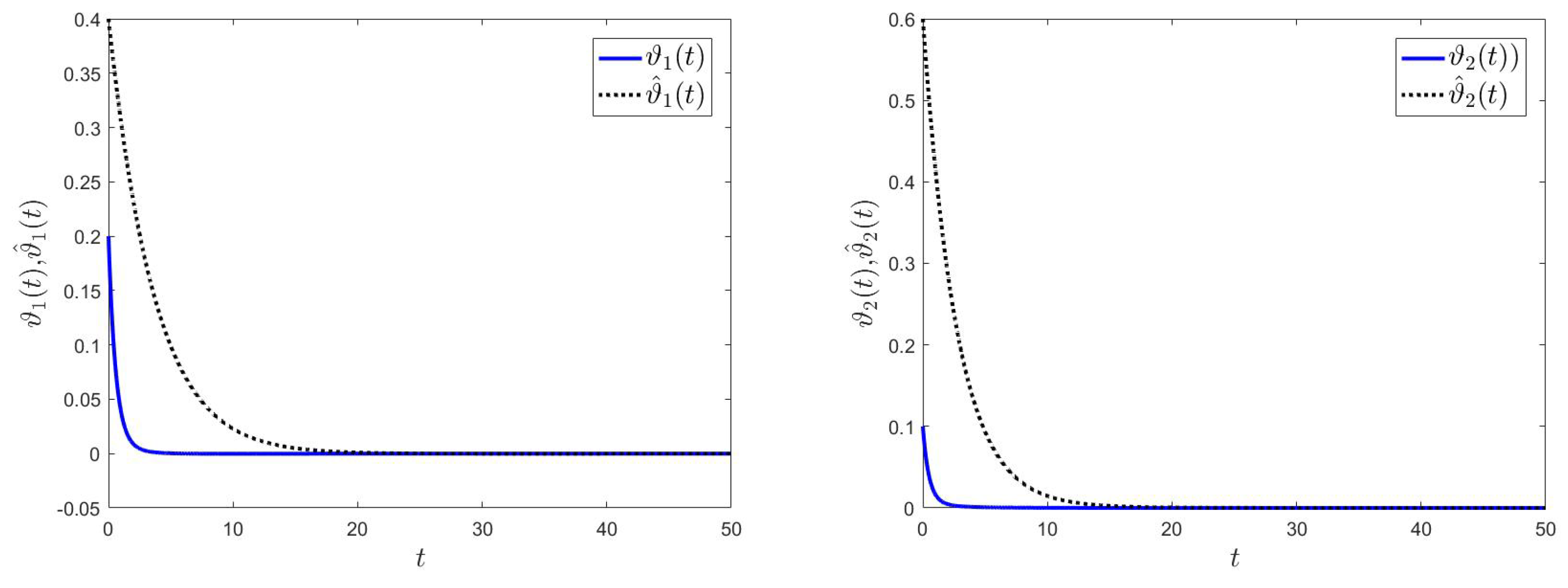
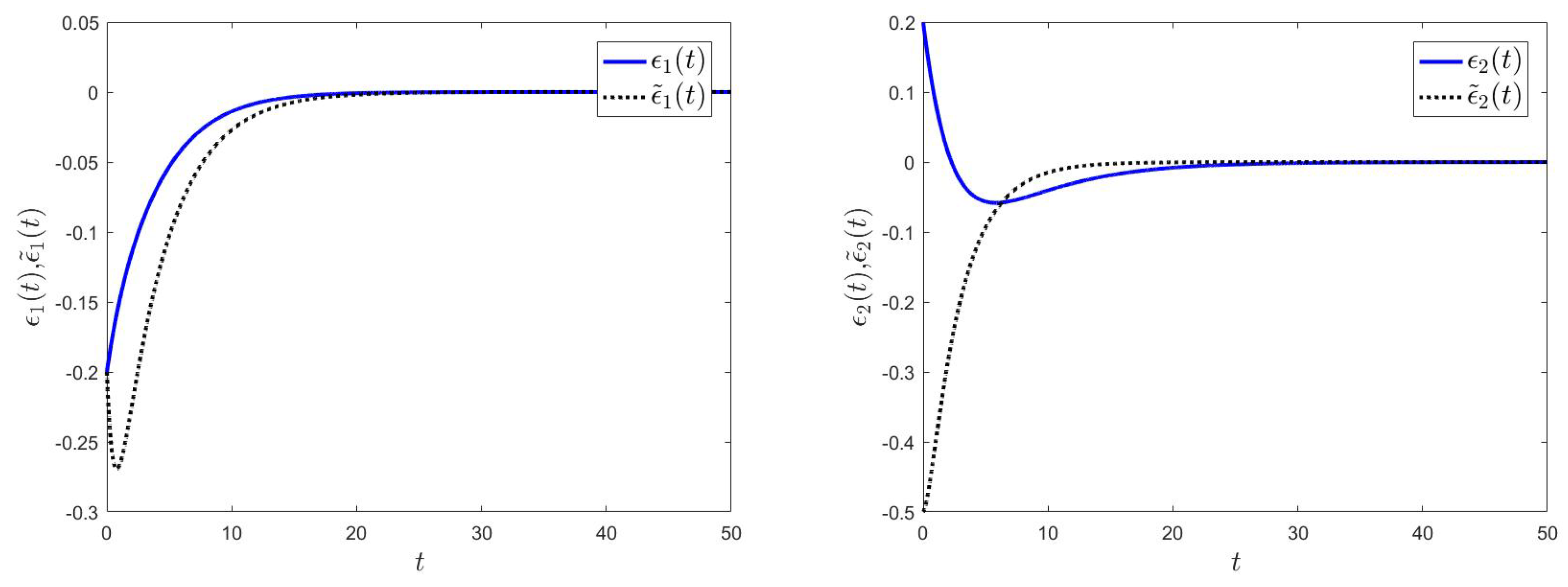
4. Illustrative Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Townsend, J.; Chaton, T.; Monteiro, J.M. Extracting relational explanations from deep neural networks: A survey from a neural-symbolic perspective. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 3456–3470. [Google Scholar] [CrossRef] [PubMed]
- Thangarajan, S.K.; Chokkalingam, A. Integration of optimized neural network and convolutional neural network for automated brain tumor detection. Sens. Rev. 2021, 41, 16–34. [Google Scholar] [CrossRef]
- Lee, Y.; Doolen, G.; Chen, H.H.; Sun, G.Z.; Maxwell, T.; Lee, H.Y. Machine learning using a higher order correlation network. Phys. D Nonlinear Phenom. 1986, 22, 276–306. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, X.; Xue, Y. Global exponential synchronization of high-order quaternion Hopfield neural networks with unbounded distributed delays and time-varying discrete delays. Math. Comput. Simul. 2022, 193, 173–189. [Google Scholar] [CrossRef]
- Dong, Z.; Wang, X.; Zhang, X.; Hu, M.; Dinh, T.N. Global exponential synchronization of discrete-time high-order switched neural networks and its application to multi-channel audio encryption. Nonlinear Anal. Hybrid Syst. 2023, 47, 101291. [Google Scholar] [CrossRef]
- Kosko, B. Adaptive bidirectional associative memories. Appl. Opt. 1987, 26, 4947–4960. [Google Scholar] [CrossRef]
- Kosko, B. Bi-directional associative memories. IEEE Trans. Syst. Man Cybern. 1988, 18, 49–60. [Google Scholar] [CrossRef]
- Simpson, P.K. Higher-ordered and intraconnected bidirectional associative memories. IEEE Trans. Syst. Man Cybern. Syst. 1990, 20, 637–653. [Google Scholar] [CrossRef]
- Cao, J.; Liang, J.; Lam, J. Exponential stability of high-order bidirectional associative memory neural networks with time delays. Phys. D Nonlinear Phenom. 2004, 199, 425–436. [Google Scholar] [CrossRef]
- Aouiti, C.; Li, X.; Miaadi, F. A new LMI approach to finite and fixed time stabilization of high-order class of BAM neural networks with time-varying delays. Neural Process. Lett. 2019, 50, 815–838. [Google Scholar] [CrossRef]
- Ho, D.W.C.; Liang, J.; Lam, J. Global exponential stability of impulsive high-order BAM neural networks with time-varying delays. Neural Netw. 2006, 19, 1581–1590. [Google Scholar] [CrossRef]
- Wang, F.; Liu, M. Global exponential stability of high-order bidirectional associative memory (BAM) neural networks with time delays in leakage terms. Neurocomputing 2016, 177, 515–528. [Google Scholar] [CrossRef]
- Yang, W.; Yu, W.; Cao, J.; Alsaadi, F.E.; Hayat, T. Almost automorphic solution for neutral type high-order Hopfield BAM neural networks with time-varying leakage delays on time scales. Neurocomputing 2017, 267, 241–260. [Google Scholar] [CrossRef]
- Aouiti, C.; Sakthivel, R.; Touati, F. Global dissipativity of high-order Hopfield bidirectional associative memory neural networks with mixed delays. Neural Comput. Appl. 2020, 32, 10183–10197. [Google Scholar] [CrossRef]
- Zu, J.; Yu, Z.; Meng, Y. Global exponential stability of high-order bidirectional associative memory (BAM) neural networks with proportional delays. Neural Process. Lett. 2020, 51, 2531–2549. [Google Scholar] [CrossRef]
- Xing, L.; Zhou, L. Polynomial dissipativity of proportional delayed BAM neural networks. Int. J. Biomath. 2020, 13, 2050050. [Google Scholar] [CrossRef]
- Zhou, L.; Zhao, Z. Asymptotic stability and polynomial stability of impulsive Cohen–Grossberg neural networks with multi-proportional delays. Neural Process. Lett. 2020, 51, 2607–2627. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Chen, X.; Liu, C. Positivity and semi-global polynomial stability of high-order Cohen–Grossberg BAM neural networks with multiple proportional delays. Inf. Sci. 2025, 689, 121512. [Google Scholar] [CrossRef]
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic system. Phys. Rev. Lett. 1990, 64, 821–824. [Google Scholar] [CrossRef]
- Zhou, L. Dissipativity of a class of cellular neural networks with proportional delays. Nonlinear Dyn. 2013, 73, 1895–1903. [Google Scholar] [CrossRef]
- Jia, S.; Hu, C.; Yu, J.; Jiang, H. Asymptotical and adaptive synchronization of Cohen-Grossberg neural networks with heterogeneous proportional delays. Neurocomputing 2018, 275, 1449–1455. [Google Scholar] [CrossRef]
- Yang, X.; Song, Q.; Cao, J.; Lu, J. Synchronization of Coupled Markovian Reaction-Diffusion Neural Networks with Proportional Delays via Quantized Control. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 951–958. [Google Scholar] [CrossRef]
- Li, Q.; Zhou, L. Global asymptotic synchronization of inertial memristive Cohen-Grossberg neural networks with proportional delays. Commun. Nonlinear Sci. Numer. Simul. 2023, 123, 107295. [Google Scholar] [CrossRef]
- Zhou, L. Delay-dependent exponential synchronization of recurrent neural networks with multiple proportional delays. Neural Process. Lett. 2015, 42, 619–632. [Google Scholar] [CrossRef]
- Wan, P.; Sun, D.; Chen, D.; Zhao, M.; Zheng, L. Exponential synchronization of inertial reaction-diffusion coupled neural networks with proportional delay via periodically intermittent control. Neurocomputing 2019, 356, 195–205. [Google Scholar] [CrossRef]
- Su, L.; Zhou, L. Exponential synchronization of memristor-based recurrent neural networks with multi-proportional delays. Neural Comput. Appl. 2019, 31, 7907–7920. [Google Scholar] [CrossRef]
- Li, L.; Chen, W.; Wu, X. Global Exponential Stability and Synchronization for Novel Complex-Valued Neural Networks With Proportional Delays and Inhibitory Factors. IEEE Trans. Cybern. 2021, 51, 2142–2152. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Huang, T.; Huang, J. Finite-time Synchronization of Neural Networks with Multiple Proportional Delays via Non-chattering Control. Int. J. Control Autom. Syst. 2018, 16, 2473–2479. [Google Scholar] [CrossRef]
- Xiaolin, X.; Rongqiang, T.; Xinsong, Y. Finite-Time Synchronization of Memristive Neural Networks with Proportional Delay. Neural Process. Lett. 2019, 50, 1139–1152. [Google Scholar]
- Yang, W.; Huang, J.; He, X.; Wen, S.; Huang, T. Finite-Time Synchronization of Neural Networks With Proportional Delays for RGB-D Image Protection. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 8149–8160. [Google Scholar] [CrossRef]
- Han, J.; Zhou, L. Finite-time synchronization of proportional delay memristive competitive neural networks. Neurocomputing 2024, 610, 128612. [Google Scholar] [CrossRef]
- Duan, L.; Li, J. Finite-time synchronization for a fully complex-valued BAM inertial neural network with proportional delays via non-reduced order and non-separation approach. Neurocomputing 2025, 611, 128648. [Google Scholar] [CrossRef]
- Aouiti, C.; Assali, E.A.; Chérif, F.; Zeglaoui, A. Fixed-time synchronization of competitive neural networks with proportional delays and impulsive effect. Neural Comput. Appl. 2020, 32, 13245–13254. [Google Scholar] [CrossRef]
- Duan, L.; Li, J. Fixed-time synchronization of fuzzy neutral-type BAM memristive inertial neural networks with proportional delays. Inf. Sci. 2021, 576, 522–541. [Google Scholar] [CrossRef]
- Wan, Y.; Zhou, L. Fixed-time synchronization of discontinuous proportional delay inertial neural networks with uncertain parameters. Inf. Sci. 2024, 678, 120931. [Google Scholar] [CrossRef]
- Liu, Y.; Wan, X.; Wu, E.; Yang, X.; Alsaadi, F.E.; Hayat, T. Finite-time synchronization of Markovian neural networks with proportional delays and discontinuous activations. Nonlinear Anal. Model. Control 2018, 23, 515–532. [Google Scholar] [CrossRef]
- Wang, W. Finite-time synchronization for a class of fuzzy cellular neural networks with time-varying coefficients and proportional delays. Fuzzy Sets Syst. 2018, 338, 40–49. [Google Scholar] [CrossRef]
- Alimi, A.M.; Aouiti, C.; Assali, E.A. Finite-time and fixed-time synchronization of a class of inertial neural networks with multi-proportional delays and its application to secure communication. Neurocomputing 2019, 332, 29–43. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Yang, S.; Yang, X. Synchronization criteria for neural networks with proportional delays via quantized control. Nonlinear Dyn. 2018, 94, 541–551. [Google Scholar] [CrossRef]
- Kinh, C.T.; Hien, L.V.; Ke, T.D. Power-Rate Synchronization of Fractional-Order Nonautonomous Neural Networks with Heterogeneous Proportional Delays. Neural Process. Lett. 2018, 47, 139–151. [Google Scholar] [CrossRef]
- Guan, K. Global power-rate synchronization of chaotic neural networks with proportional delay via impulsive control. Neurocomputing 2018, 283, 256–265. [Google Scholar] [CrossRef]
- Zhou, L.; Zhao, Z. Exponential synchronization and polynomial synchronization of recurrent neural networks with and without proportional delays. Neurocomputing 2020, 372, 109–116. [Google Scholar] [CrossRef]
- Yao, Z.; Zhang, Z.; Wang, Z.; Lin, C.; Chen, J. Polynomial synchronization of complex-valued inertial neural networks with multi-proportional delays. Commun. Theor. Phys. 2022, 74, 125801. [Google Scholar] [CrossRef]
- Zhou, L.; Zhu, Q.; Huang, T. Global Polynomial Synchronization of Proportional Delayed Inertial Neural Networks. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 4487–4497. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Z.; Cao, J.; Abdel-Aty, M.; Meng, X. Polynomial synchronization of quaternion-valued fuzzy cellular neural networks with proportional delays. Nonlinear Dyn. 2025, 113, 3523–3542. [Google Scholar] [CrossRef]
- Wan, Y.; Zhou, L.; Han, J. Global polynomial synchronization of proportional delay memristive neural networks with uncertain parameters and its application to image encryption. Eng. Appl. Artif. Intell. 2025, 147, 110290. [Google Scholar] [CrossRef]
- Huang, Y.; Zhao, X. General Decay Synchronization of State and Spatial Diffusion Coupled Delayed Memristive Neural Networks with Reaction-diffusion Terms. Int. J. Control Autom. Syst. 2024, 22, 2313–2326. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cong, E.-y.; Zhang, X.; Zhu, L. Semi-Global Polynomial Synchronization of High-Order Multiple Proportional-Delay BAM Neural Networks. Mathematics 2025, 13, 1512. https://doi.org/10.3390/math13091512
Cong E-y, Zhang X, Zhu L. Semi-Global Polynomial Synchronization of High-Order Multiple Proportional-Delay BAM Neural Networks. Mathematics. 2025; 13(9):1512. https://doi.org/10.3390/math13091512
Chicago/Turabian StyleCong, Er-yong, Xian Zhang, and Li Zhu. 2025. "Semi-Global Polynomial Synchronization of High-Order Multiple Proportional-Delay BAM Neural Networks" Mathematics 13, no. 9: 1512. https://doi.org/10.3390/math13091512
APA StyleCong, E.-y., Zhang, X., & Zhu, L. (2025). Semi-Global Polynomial Synchronization of High-Order Multiple Proportional-Delay BAM Neural Networks. Mathematics, 13(9), 1512. https://doi.org/10.3390/math13091512