
A Rumor-Spreading Model with Three Identical Time Delays


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. A Delayed Rumor-Spreading Model
- ()
- Outsiders enter the network at a constant rate .
- ()
- Each insider exits the network at a constant rate .
- ()
- When exposed to a spreader, an ignorant insider becomes rumor-spreading at a constant rate . Moreover, the time delay for a spreader to have a negative impact on an exposed ignorant insider is .
- ()
- When exposed to a stifler, a spreader naturally becomes rumor-stifling at a constant rate . Moreover, the time delay for the conversion is .
- ()
- When exposed to a stifler, a spreader becomes rumor-stifling at a constant rate . Moreover, the time delay for a stifler to have a positive influence on a spreader is .
3. Existence of a Rumor-Endemic Equilibrium
- (C1)
- .
- (C2)
- .
- (C3)
- .
- (C1)
- Suppose . The model admits no rumor-endemic equilibrium.
- (C2)
- Suppose , either or . The model admits no rumor-endemic equilibrium.
- (C3)
- Suppose , , and . The model admits the unique rumor-endemic equilibrium , where and .
- (C4)
- Suppose , either or . The model admits no rumor-endemic equilibrium.
- (C5)
- Suppose , , and . The model admits no rumor-endemic equilibrium.
- (C6)
- Suppose , , and . The model admits the unique rumor-endemic equilibrium , where and .
- (C7)
- Suppose , , and . The model admits the unique rumor-endemic equilibrium , where and .
- (C8)
- If , and . The model admits a pair of rumor-endemic equilibria, and .
- (C1)
- Suppose . The model admits no rumor-endemic equilibrium.
- (C2)
- Suppose , either or . The model admits no rumor-endemic equilibrium.
- (C3)
- Suppose , , and . The model admits the unique rumor-endemic equilibrium .
- (C4)
- Suppose , either or . The model admits no rumor-endemic equilibrium.
- (C5)
- Suppose and . The model admits the unique rumor-endemic equilibrium .
- (C1)
- .
- (C2)
- .
- (C3)
- .
- (C1)
- ⇔ ∧ .
- (C2)
- ⇔ ∧ .
- (C3)
- ⇔ ∨ .
- (C4)
- ⇔ ∨ .
- (C5)
- ⇔ ∧ .
- (C6)
- ⇔ ∧ .
- (C7)
- ⇔ ∨ .
- (C8)
- ⇔ ∨ .
- (C1)
- Suppose . The model admits no rumor-endemic equilibrium.
- (C2)
- Suppose , either or . The model admits no rumor-endemic equilibrium.
- (C3)
- Suppose , , and . The model admits the unique rumor-endemic equilibrium .
- (C4)
- Suppose . The model admits no rumor-endemic equilibrium.
- (C5)
- Suppose and . The model admits no rumor-endemic equilibrium.
- (C6)
- Suppose and . The model admits the unique rumor-endemic equilibrium .
- (C1)
- .
- (C2)
- .
- (C1)
- Suppose . The model admits no rumor-endemic equilibrium.
- (C2)
- Suppose and . The model admits no rumor-endemic equilibrium.
- (C3)
- Suppose and . The model admits the unique rumor-endemic equilibrium , where and .
- (a)
- In the case where , there exists no rumor-endemic equilibrium. Hence, there exists no backward bifurcation.
- (b)
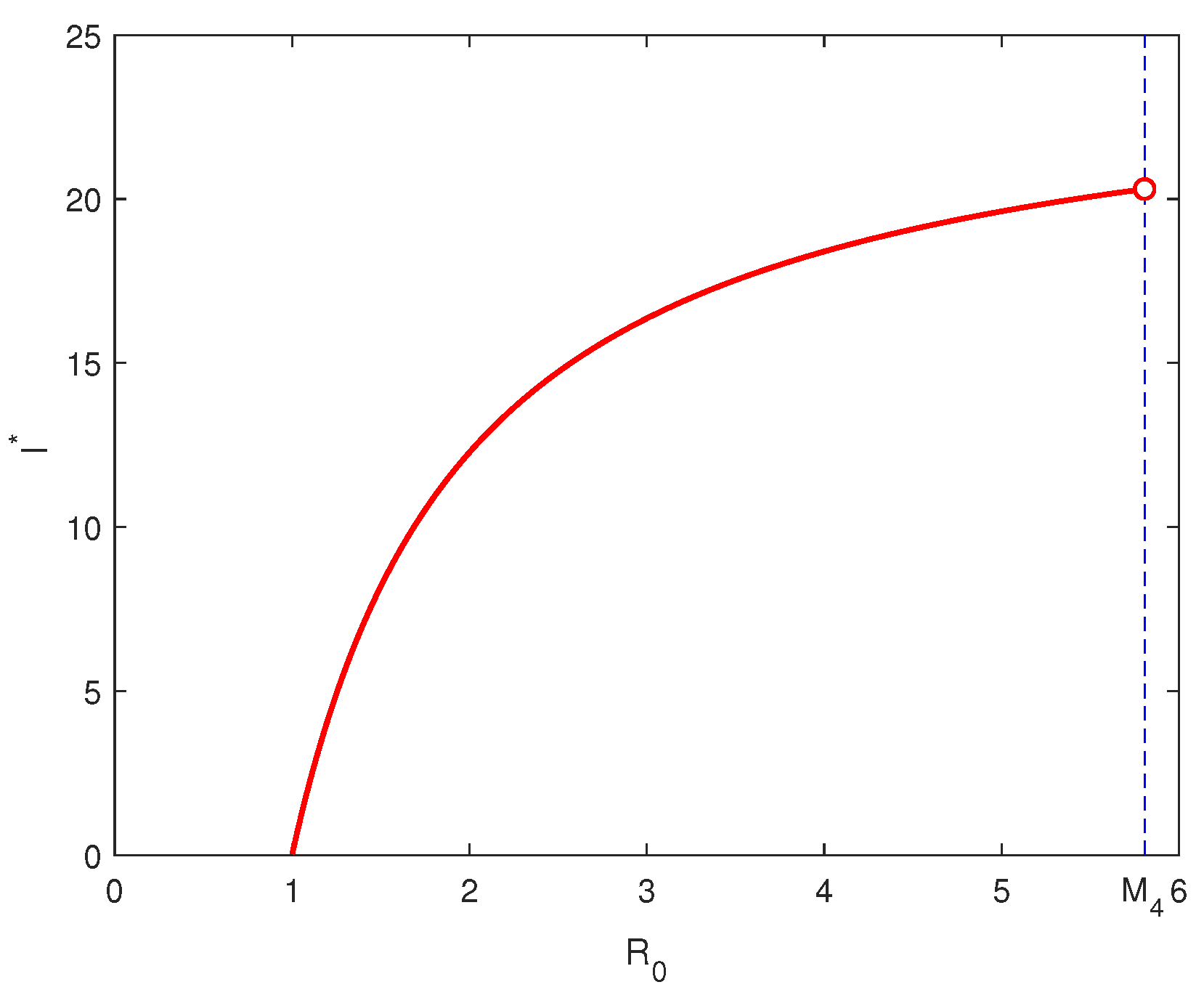
- In the case where , the existence of a rumor-endemic equilibrium is determined by the negativity of . As a consequence, there exists a conditional forward bifurcation.
4. Dynamics of the Rumor-Free Equilibrium
4.1. Local Asymptotic Stability
- (1)
- Suppose . Then, is locally asymptotically stable.
- (2)
- Suppose . Then, is unstable.
- (1)
- Suppose and . Then, is locally asymptotically stable.
- (2)
- Suppose . Then, is unstable.
4.2. Global Asymptotic Stability
5. Dynamics of a Rumor-Endemic Equilibrium
- (C1)
- .
- (C2)
- .
- (C1)
- .
- (C2)
- Either or ( ∧ ).
- (C3)
- is not very small.
6. Simulation Experiments
6.1. Asymptotic Stability of the Rumor-Free Equilibrium
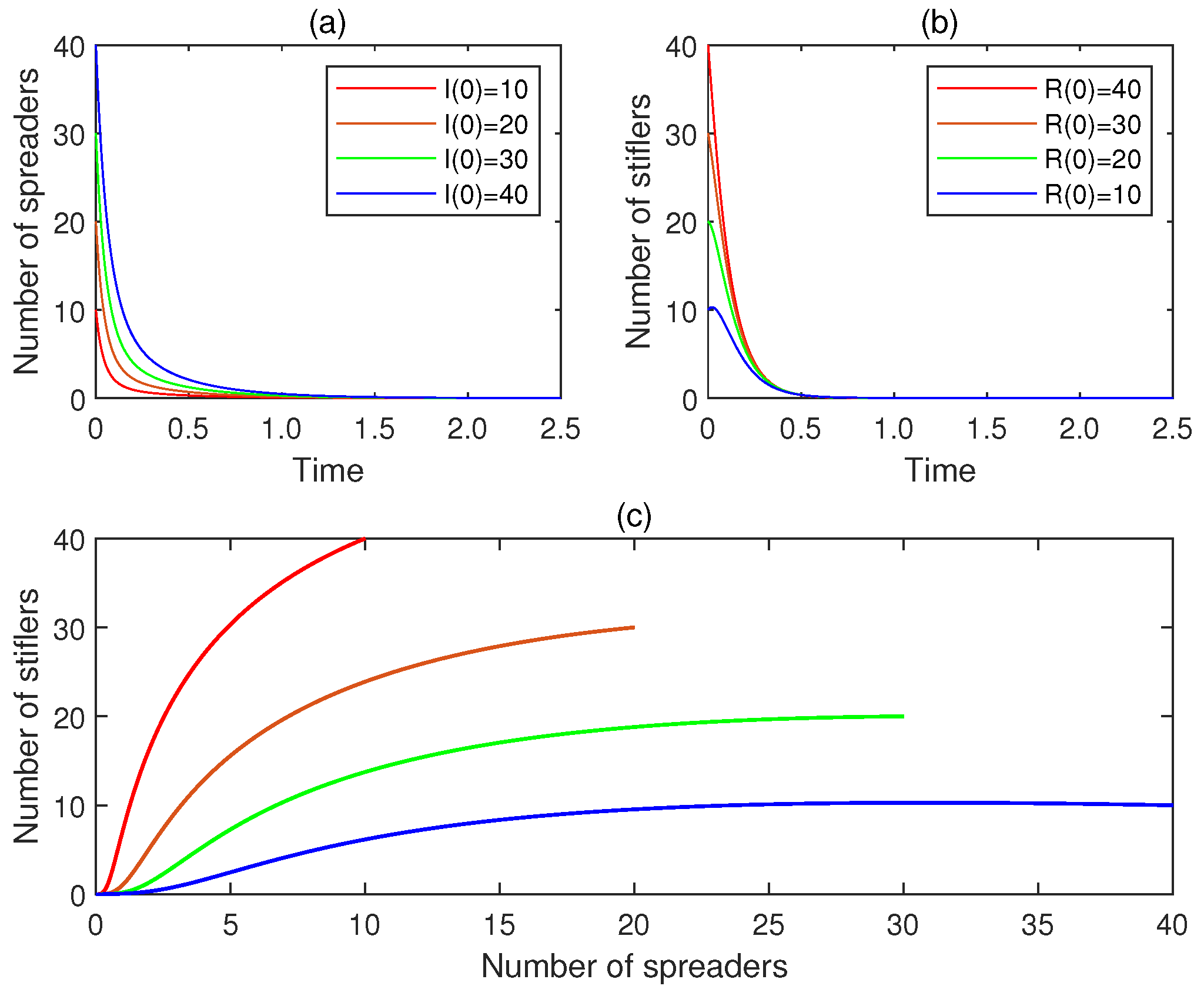
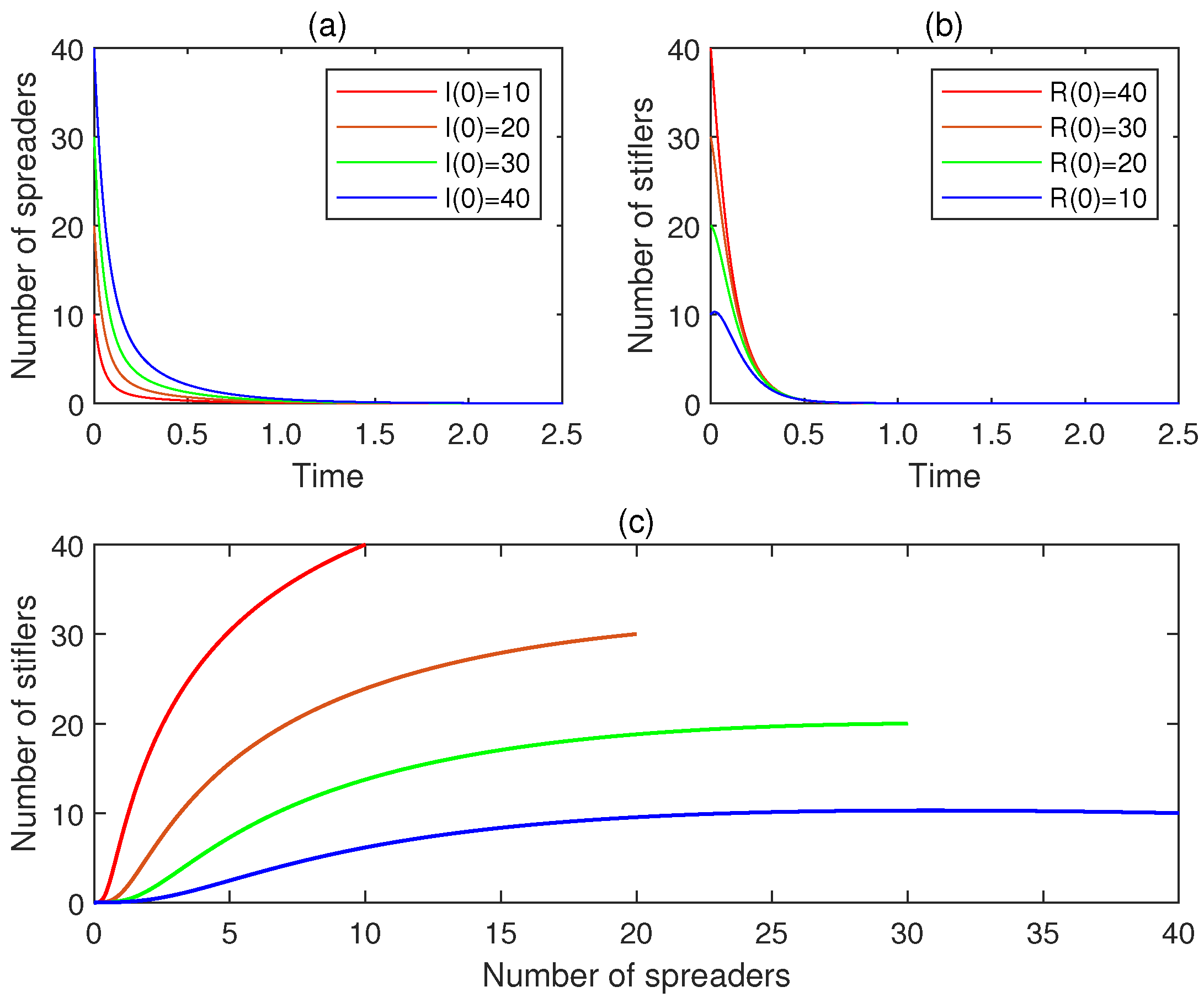
- Experiment 1: Consider model (2) with no time delay, where , , , , and . Since , it follows from claim (1) of Theorem 3 that the rumor-free equilibrium is locally asymptotically stable. Let . Figure 2a displays the time plot for the number of spreaders. Figure 2b exhibits the time plot for the number of stiflers. Figure 2c plots the phase portrait for the state evolution. It is seen that is locally asymptotically stable.
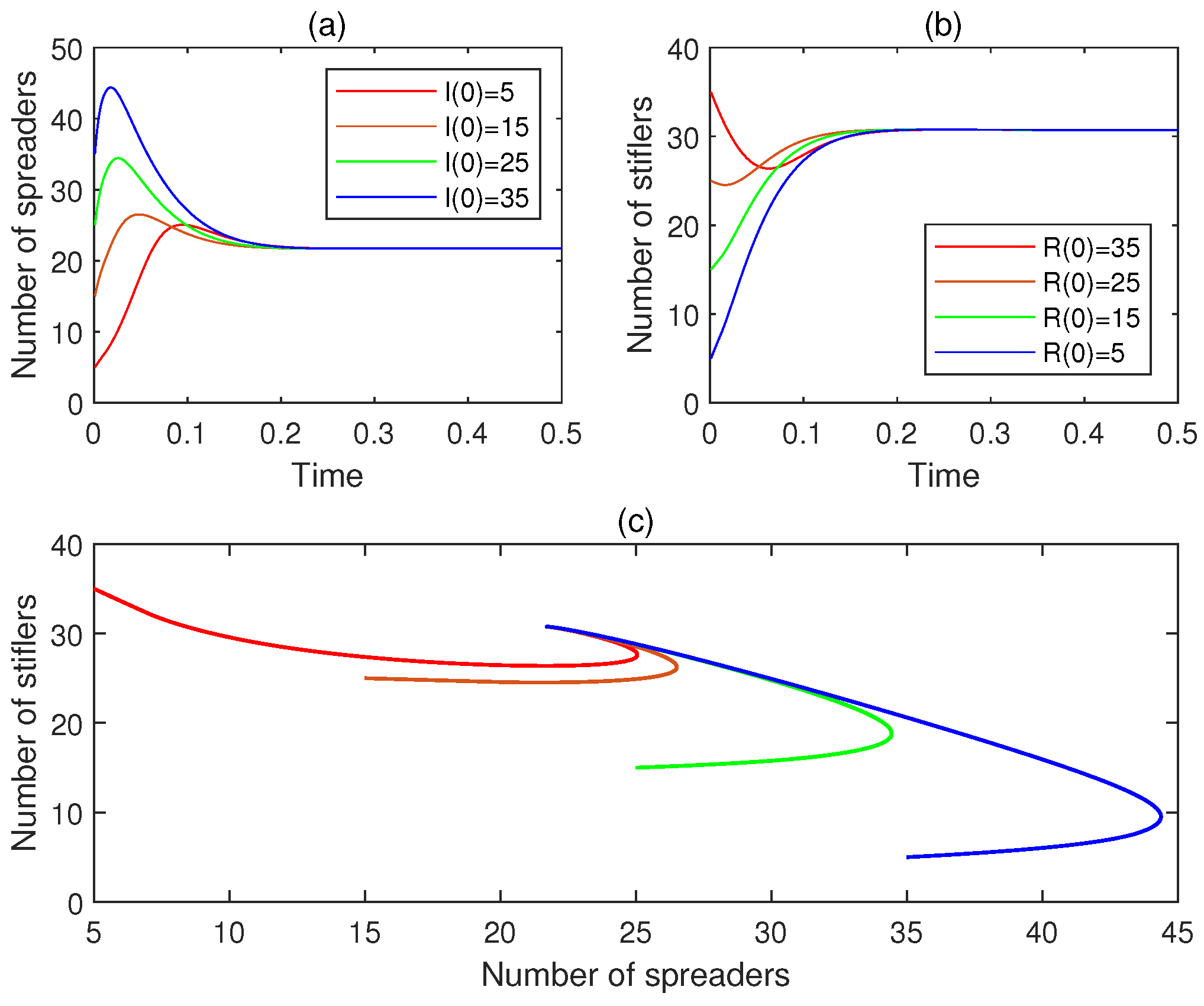
- Experiment 2: Consider model (2) with no time delay, where , , , , and . Since , it follows from claim (2) of Theorem 3 that the rumor-free equilibrium is unstable. Let . Figure 3a demonstrates the time plot for the number of spreaders. Figure 3b presents the time plot for the number of stiflers. Figure 3c portrays the phase portrait for the state transition. It is seen that is unstable.
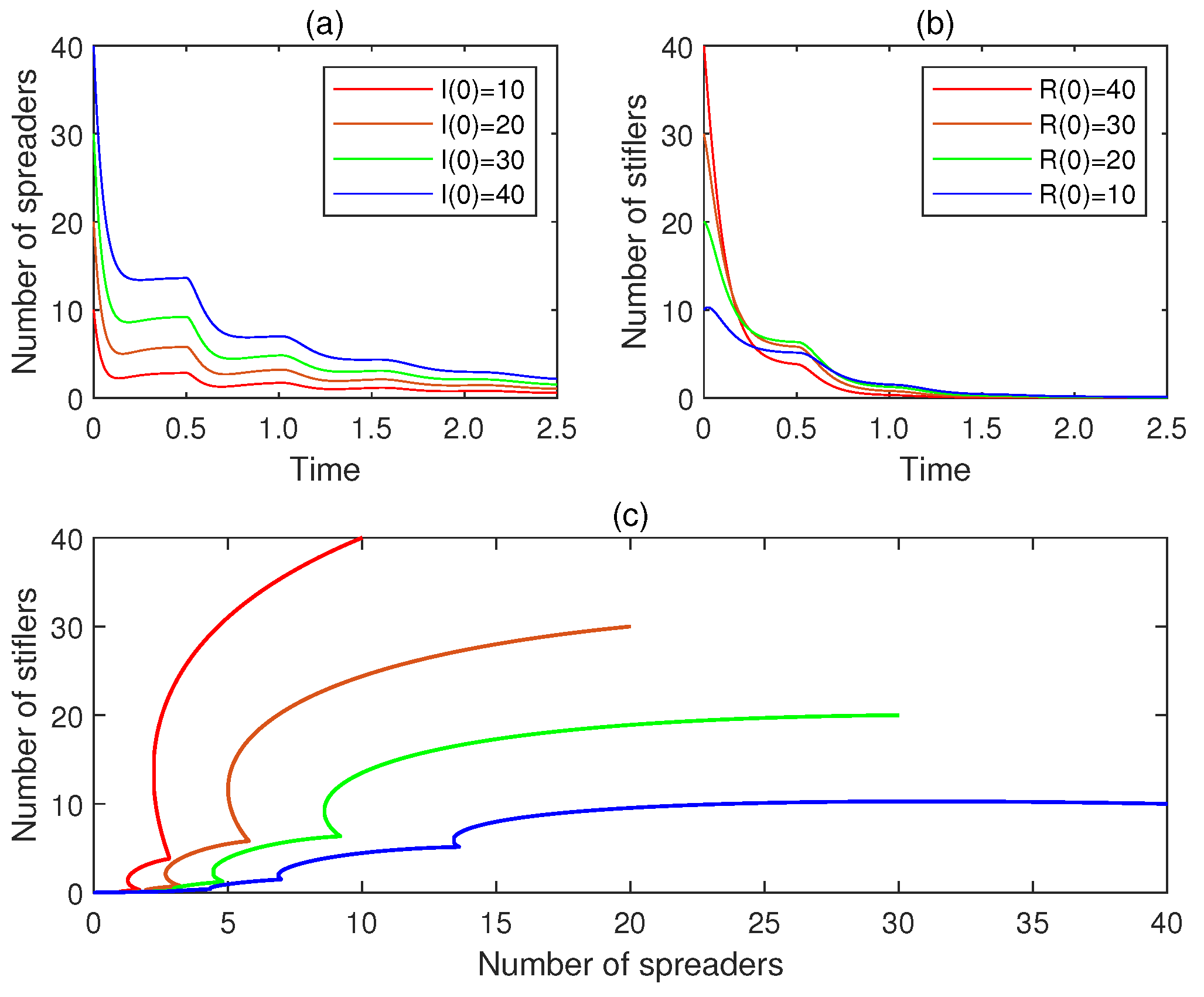
- Experiment 3: Consider model (2) with a time delay, where , , , , , and . Since and , it follows from claim (1) of Theorem 4 that the rumor-free equilibrium is locally asymptotically stable. For , let , , or or . Figure 4a depicts the time plot for the number of spreaders. Figure 4b provides the time plot for the number of stiflers. Figure 4c shows the phase portrait for the state transition. It is seen that is locally asymptotically stable.
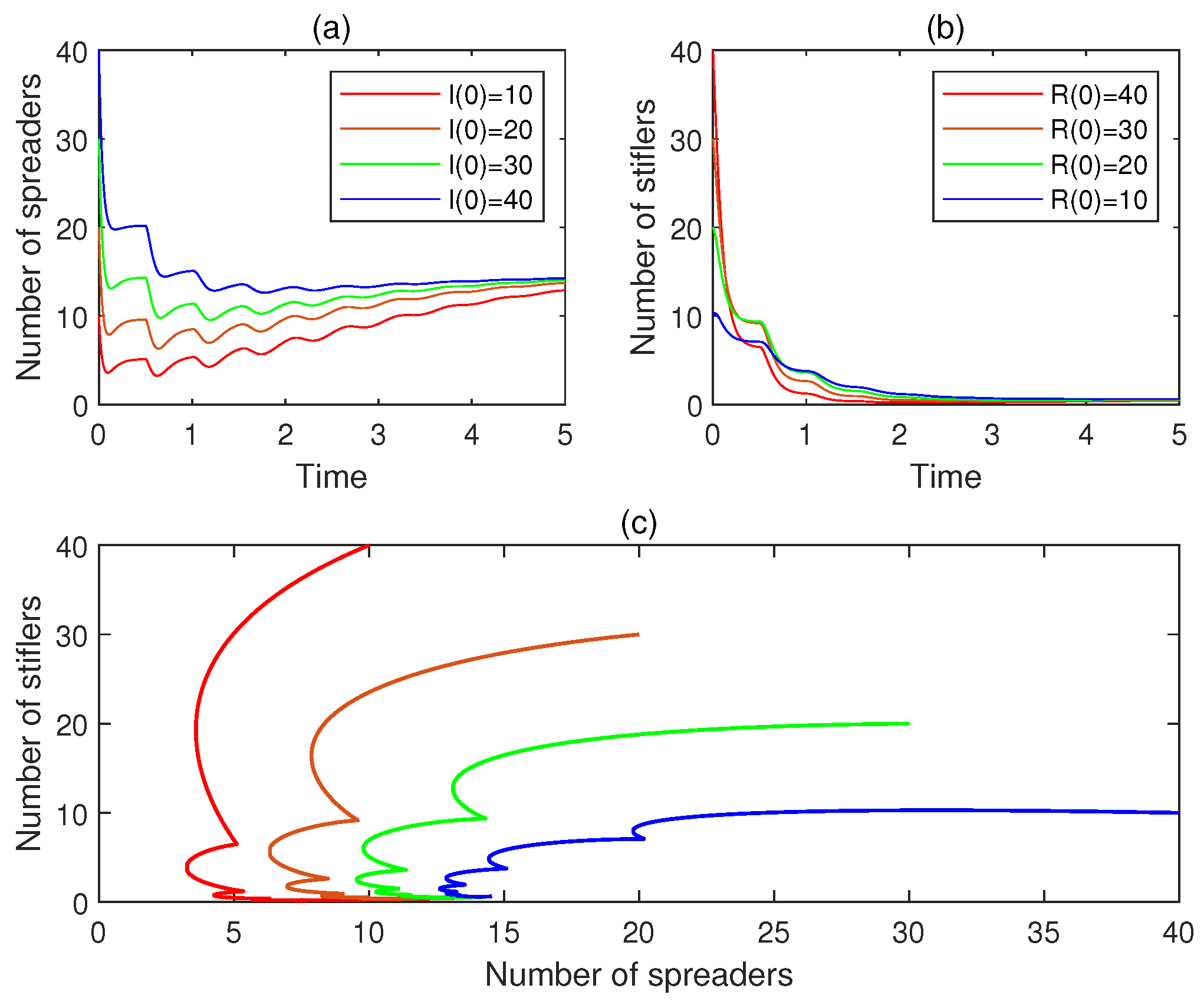
- Experiment 4: Consider model (2) with a time delay, where , , , , , and . Since , it follows from claim (2) of Theorem 4 that the rumor-free equilibrium is unstable. For , let , , , or . Figure 5a exhibits the time plot for the number of spreaders. Figure 5b displays the time plot for the number of stiflers. Figure 5c plots the phase portrait for the state transition. It is seen that is unstable.
- Experiment 5: Consider model (2) with no time delay, where , , , , and . Since , it follows from Theorem 6 that the rumor-free equilibrium is globally asymptotically stable. Let . Figure 6a depicts the time plot for the number of spreaders. Figure 6b shows the time plot for the number of stiflers. Figure 6c exhibits the phase portrait for the state transition. It is seen that is globally asymptotically stable.
- Experiment 6: Consider model (2) with a time delay, where , , , , , and . Since , it follows from Theorem 7 that the rumor-free equilibrium is globally asymptotically stable. For , let , , , or . Figure 7a provides the time plot for the number of spreaders. Figure 7b depicts the time plot for the number of stiflers. Figure 7c demonstrates the phase portrait for the state transition. It is seen that is globally asymptotically stable.
6.2. Asymptotic Stability of a Rumor-Endemic Equilibrium
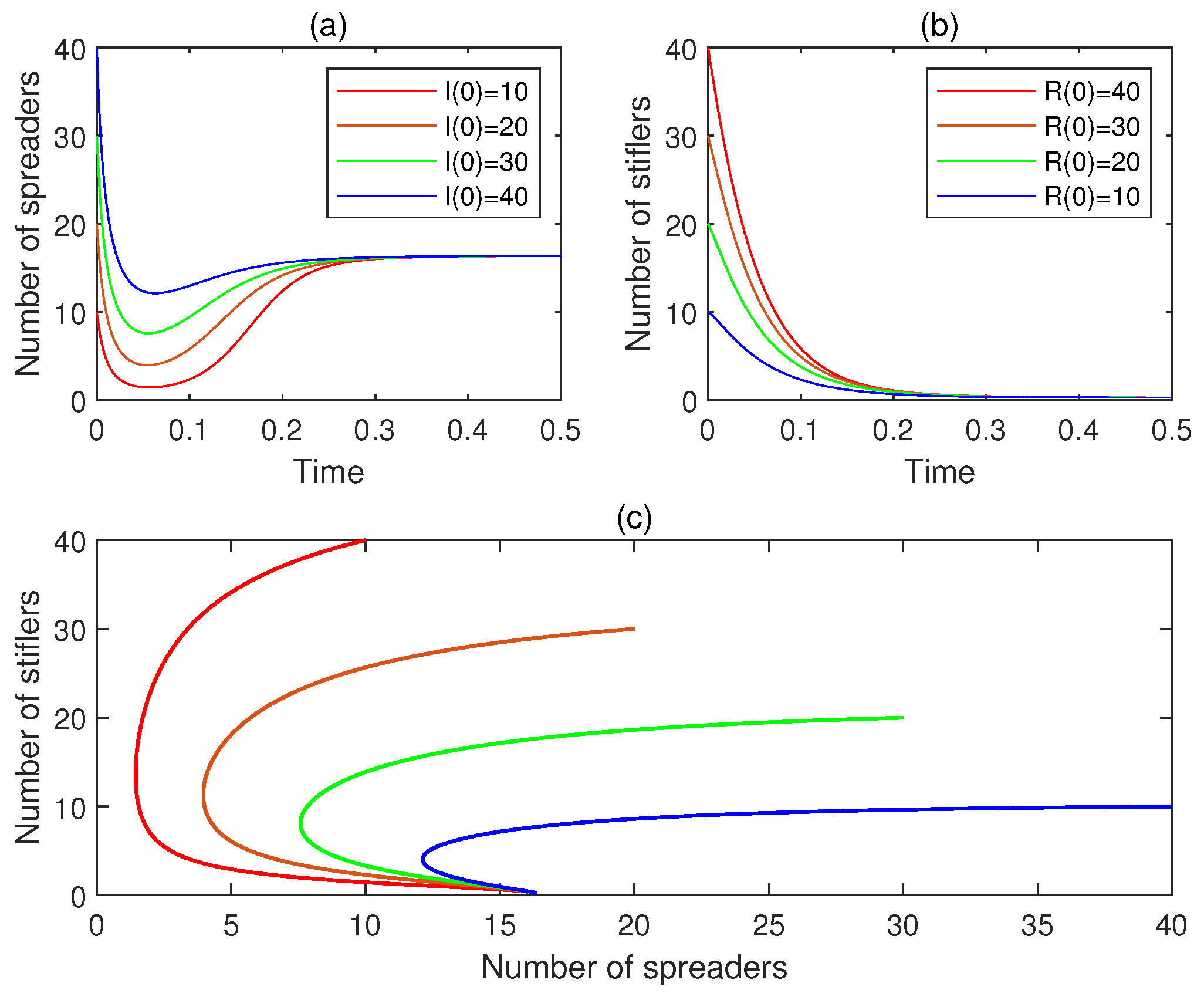
- Experiment 7: Consider model (5) with no time delay, where , , , , and . Then, is a rumor-endemic equilibrium. Since and , it follows from Theorem 8 that is locally asymptotically stable. Let . Figure 8a displays the time plot for the number of spreaders. Figure 8b exhibits the time plots for the number of stiflers. Figure 8c plots the phase portrait for the state transition. It is seen that is locally asymptotically stable.
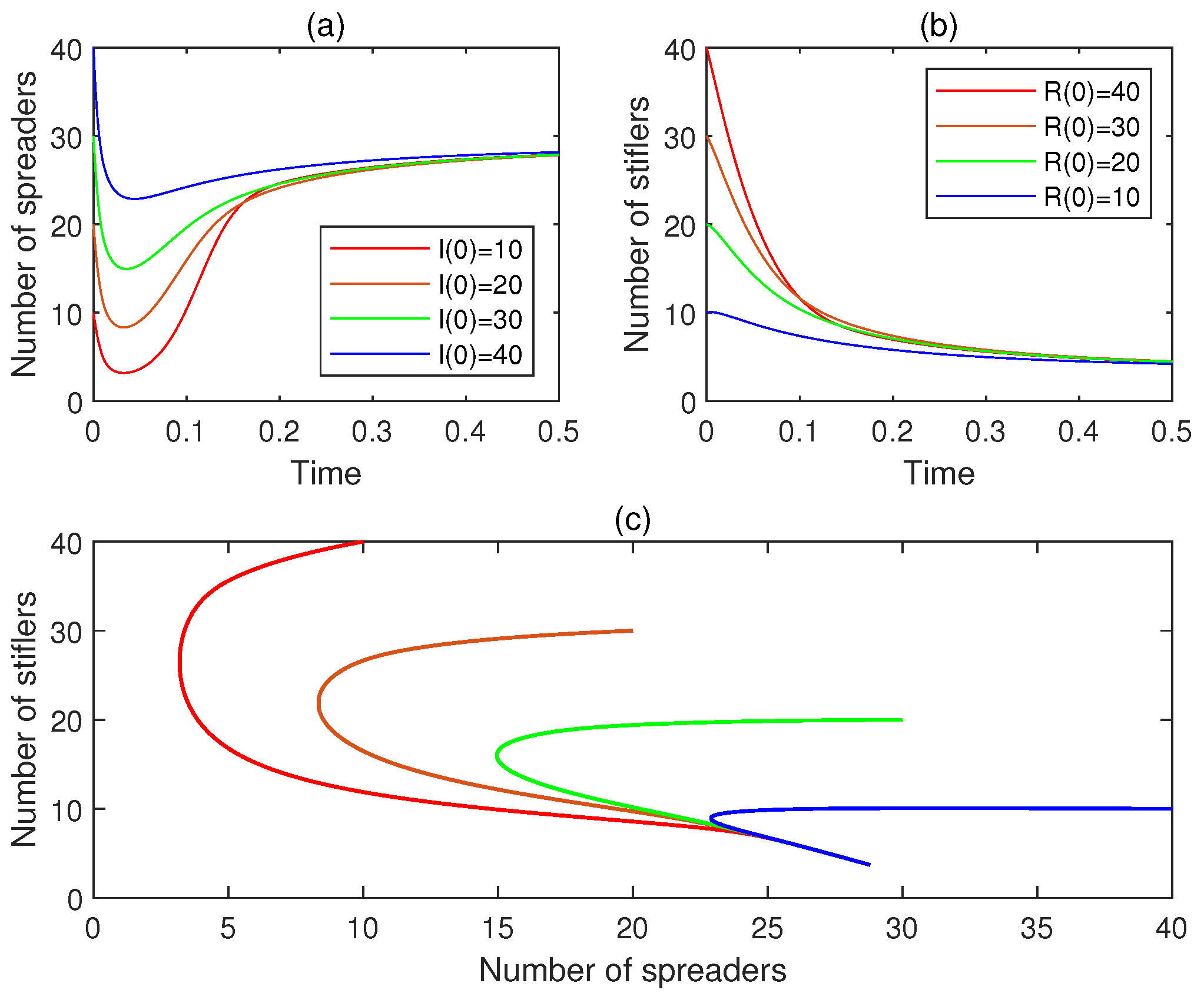
- Experiment 8: Consider model (2) with a small time delay, where , , , , , and . Then, is a rumor-endemic equilibrium. Since , , and , it follows from Theorem 9 that is locally asymptotically stable. For , let , , , or . Figure 9a provides the time plot for the number of spreaders. Figure 9b depicts the time plot for the number of stiflers. Figure 9c presents the phase portrait for the state transition. It is seen that is locally asymptotically stable.
- Experiment 9: Consider model (2) with a small time delay, where , , , , , and . Then, is a rumor-endemic equilibrium. Since , , , and , it follows from Theorem 9 that is locally asymptotically stable. For , let , , , or . Figure 10a provides the time plot for the number of spreaders. Figure 10b depicts the time plot for the number of stiflers. Figure 10c presents the phase portrait for the state transition. It is seen that is locally asymptotically stable.
6.3. Effect of the Time Delay
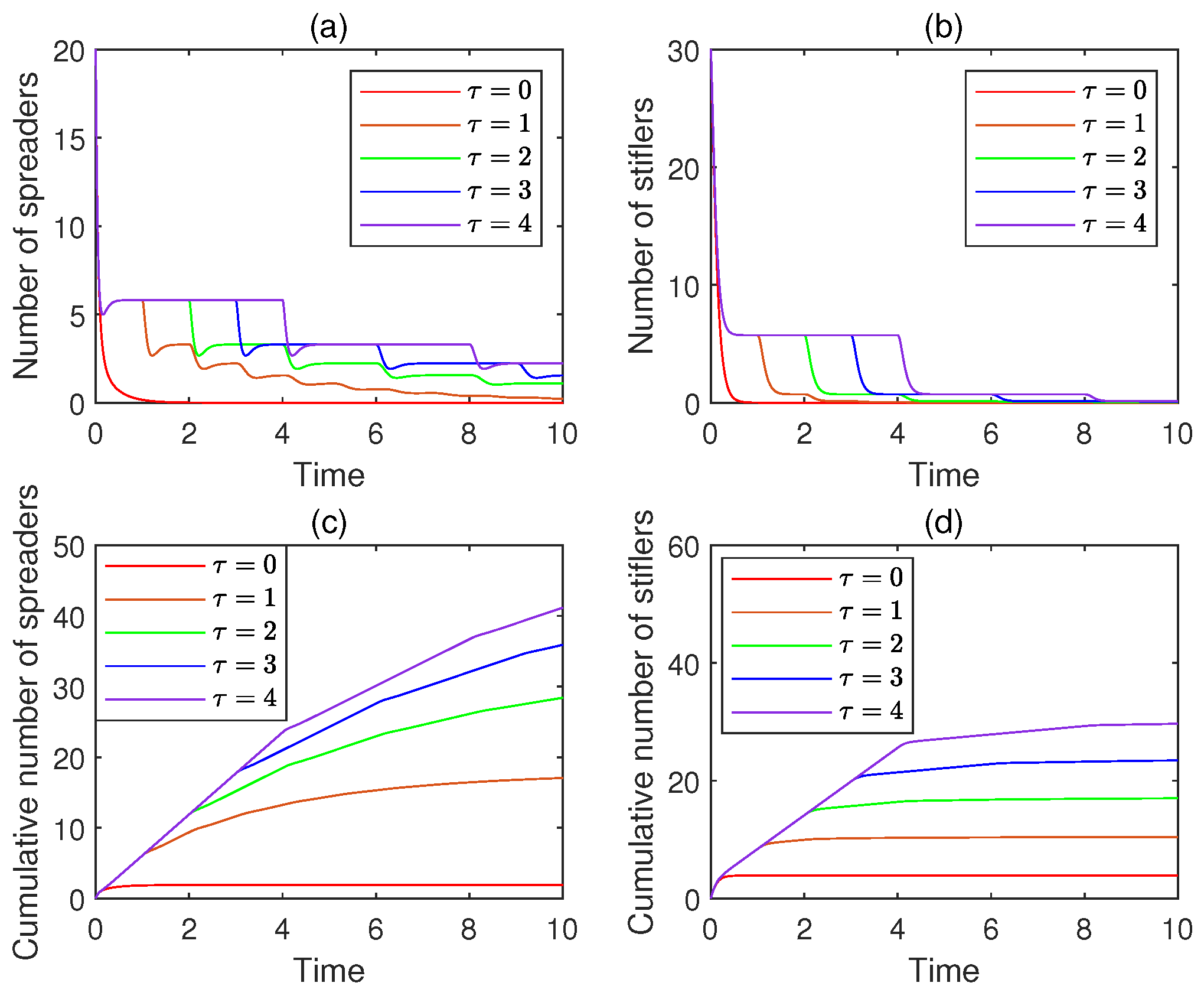
- Experiment 10: Consider five delayed rumor-spreading models, where , , , , , and . For , let and . For each , Figure 11a exhibits the time plot for the number of spreaders, Figure 11b depicts the time plot for the number of stiflers, Figure 11c displays the time plot for the cumulative number of spreaders, and Figure 11d shows the time plot for the cumulative number of stiflers. It is observed that with the increase in the time delay, the four numbers increase simultaneously.
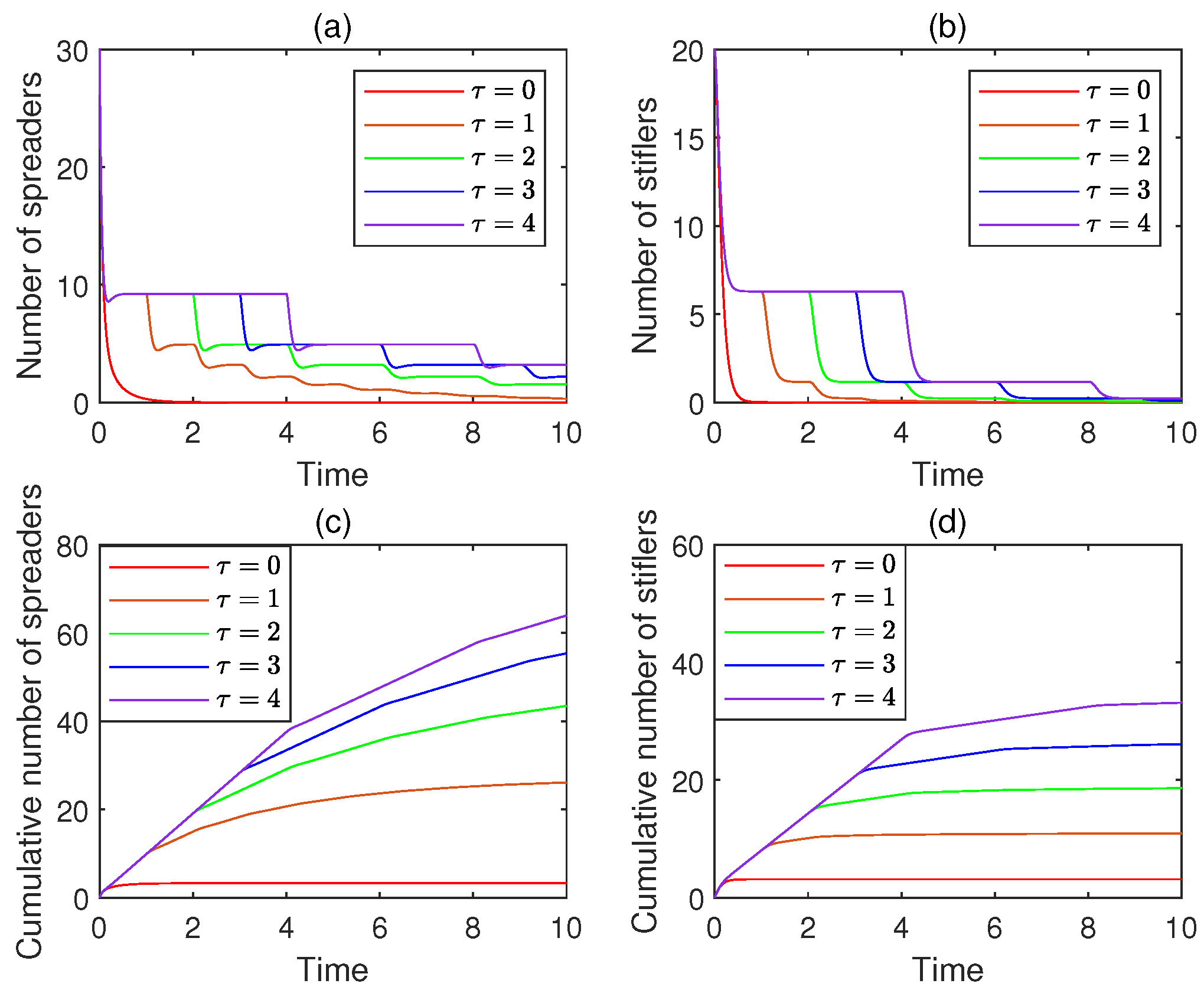
- Experiment 11: Consider five delayed rumor-spreading models, where , , , , , and . For , let and . For each , Figure 12a exhibits the time plot for the number of spreaders, Figure 12b depicts the time plot for the number of stiflers, Figure 12c displays the time plot for the cumulative number of spreaders, and Figure 12d shows the time plot for the cumulative number of stiflers. It is observed that with the increase in the time delay, the four numbers increase simultaneously.
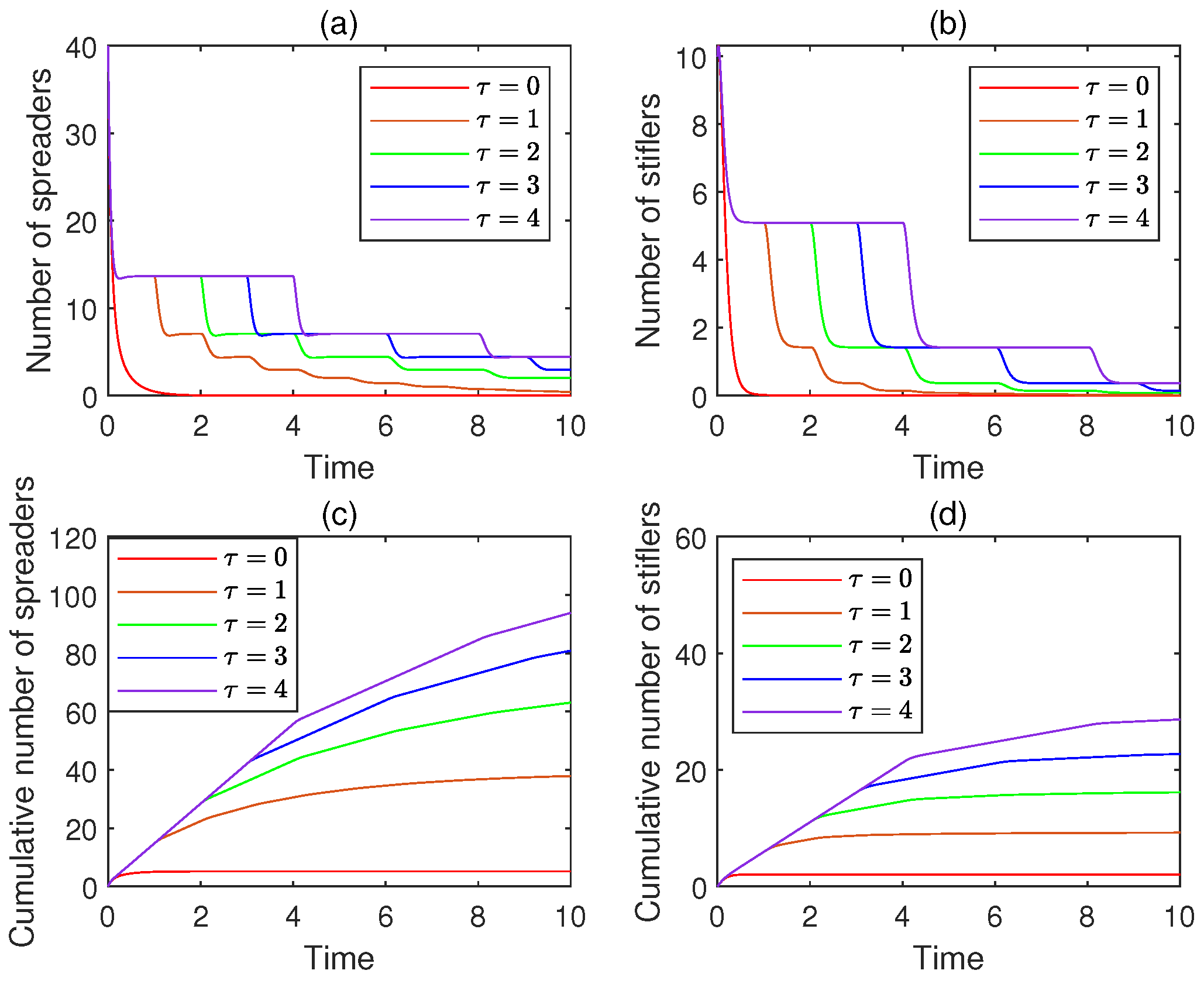
- Experiment 12: Consider five delayed rumor-spreading models, where , , , , , and . For , let and . For each , Figure 13a exhibits the time plot for the number of spreaders, Figure 13b depicts the time plot for the number of stiflers, Figure 13c displays the time plot for the cumulative number of spreaders, and Figure 13d shows the time plot for the cumulative number of stiflers. It is observed that with the increase in the time delay, the four numbers increase simultaneously.
- Experiment 13: Consider five delayed rumor-spreading models, where , , , , , and . For , let and . For each , Figure 14a exhibits the time plot for the number of spreaders, Figure 14b depicts the time plot for the number of stiflers, Figure 14c displays the time plot for the cumulative number of spreaders, and Figure 14d shows the time plot for the cumulative number of stiflers. It is observed that with the increase in the time delay, the four numbers increase simultaneously.
- (a)
- With the increase in the time delay, the number of spreaders increases. Hence, it is concluded that the increase in the time delay facilitates rumor spreading and extends the rumor-spreading duration.
- (b)
- With the increase in the time delay, the cumulative number of spreaders, which is represented by the area under the number of spreaders, increases.
- (c)
- With the increase in the time delay, the number of stiflers increases. Hence, it is concluded that the increase in the time delay facilitates rumor stifling and extends the rumor-stifling duration.
- (d)
- With the increase in the time delay, the cumulative number of stiflers, which is represented by the area under the number of stiflers, increases.
- (e)
- Three identical time delays work collaboratively to change the rate of increase in spreaders.
7. Parameter Sensitivity and Implications
7.1. Effect of the Parameters on the Basic Reproduction Number
7.2. Relationship Between the Existence of a Rumor-Endemic Equilibrium and the Range of Some Parameters
- (C1)
- .
- (C2)
- .
- (C3)
- .
- (C1)
- .
- (C2)
- .
- (C3)
- .
- (C1)
- .
- (C2)
- .
- (C3)
- , .
- (C1)
- , .
- (C2)
- , .
- (C3)
- .
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Peterson, W.; Gist, N.P. Rumor and public opinion. Am. J. Sociol. 1951, 57, 159–167. [Google Scholar] [CrossRef]
- Allport, G.W.; Postman, L. An analysis of rumor. Public Opin. Q. 1946, 10, 501–517. [Google Scholar] [CrossRef]
- Britton, N.F. Essential Mathematical Biology; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Goffman, W.; Newill, V.A. Generalization of epidemic Theory: An application to the transmission of ideas. Nature 1964, 204, 501–517. [Google Scholar] [CrossRef]
- Daley, D.J.; Kendall, D.G. Epidemics and rumours. Nature 1964, 204, 1118. [Google Scholar] [CrossRef]
- Daley, D.J.; Kendall, D.G. Stochastic rumours. IMA J. Appl. Math. 1965, 1, 42–55. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, J.; Chen, Y.; Wang, Q.; Cheng, J.; Cui, H. SIHR rumor spreading model in social networks. Phys. A Stat. Mech. Its Appl. 2012, 391, 2444–2453. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, L.; Huang, R. 2SI2R rumor spreading model in homogeneous networks. Phys. A Stat. Mech. Its Appl. 2014, 413, 153–161. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, X.; Wang, J.; Qiu, X.; Xie, W. Rumor-propagation model with consideration of refutation mechanism in homogeneous social networks. Discret. Dyn. Nat. Soc. 2014, 1, 659273. [Google Scholar] [CrossRef]
- Wei, Y.; Huo, L.; He, H. Research on rumor-spreading model with Holling type III functional response. Mathematics 2022, 10, 632. [Google Scholar] [CrossRef]
- Huo, L.; Ding, F.; Liu, C.; Cheng, Y. Dynamical analysis of rumor spreading model considering node activity in complex networks. Complexity 2018, 1, 1049805. [Google Scholar] [CrossRef]
- Huo, L.; Chen, S. Rumor propagation model with consideration of scientific knowledge level and social reinforcement in heterogeneous network. Physica 2020, 559, 125063. [Google Scholar] [CrossRef]
- Huo, L.; Chen, S.; Xie, X.; Liu, H.; He, J. Optimal control of ISTR rumor propagation model with social reinforcement in heterogeneous network. Complexity 2021, 1, 5682543. [Google Scholar] [CrossRef]
- Tong, X.; Jiang, H.; Chen, X.; Yu, S.; Li, J. Dynamic analysis and optimal control of rumor spreading model with recurrence and individual behaviors in heterogeneous networks. Entropy 2022, 24, 464. [Google Scholar] [CrossRef]
- Yang, L.X.; Li, P.; Yang, X.; Wu, Y.; Tang, Y.Y. On the competition of two conflicting messages. Nonlinear Dyn. 2018, 91, 1853–1869. [Google Scholar] [CrossRef]
- Yang, L.X.; Zhang, T.; Yang, X.; Wu, Y.; Tang, Y.Y. Effectiveness analysis of a mixed rumor-quelling strategy. J. Frankl. Inst. 2018, 355, 8079–8105. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, L.X.; Zhong, X.; Yang, X.; Wu, Y.; Tang, Y.Y. Minimizing the impact of a rumor via isolation and conversion. Physica 2019, 526, 120867. [Google Scholar] [CrossRef]
- Huang, D.W.; Yang, L.X.; Li, P.; Yang, X.; Tang, Y.Y. Developing cost-effective rumor-refuting strategy through game-theoretic approach. IEEE Syst. J. 2021, 15, 5034–5045. [Google Scholar] [CrossRef]
- Liu, F.; Liu, H.; Li, Y.; Sidorov, D. Two relaxed quadratic function negative-determination lemmas: Application to time-delay systems. Automatica 2023, 147, 110697. [Google Scholar] [CrossRef]
- Wu, M.; He, Y.; She, J.H.; Liu, G.P. Delay-dependent criteria for robust stability of time-varying delay systems. Automatica 2004, 40, 1435–1439. [Google Scholar] [CrossRef]
- Dey, R.; Ghosh, S.; Ray, G.; Rakshit, A.; Balas, V.E. Improved delay-range-dependent stability analysis of a time-delay system with norm bounded uncertainty. ISA Trans. 2015, 58, 50–57. [Google Scholar] [CrossRef]
- Sun, Y.; Li, N.; Shen, M.; Wei, Z.; Sun, G. Robust H∞ control of uncertain linear system with interval time-varying delay by using Wirtinger inequality. Appl. Math. Comput. 2018, 335, 1–11. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, H.; Li, X. A novel method for stability analysis of time-varying delay systems. IEEE Trans. Autom. Control 2020, 66, 1422–1428. [Google Scholar] [CrossRef]
- He, Y.; Wang, Q.G.; Lin, C.; Wu, M. Augmented Lyapunov functional and delay-dependent stability for neural systems. Int. J. Robust Nonlinear Control 2005, 15, 923–933. [Google Scholar] [CrossRef]
- Li, Y.; Gu, K.; Zhou, J.; Xu, S. Estimating stable delay intervals with a discretized Lyapunov-Krasovskii functional formulation. Automatica 2014, 50, 1691–1697. [Google Scholar] [CrossRef]
- Seuret, A.; Gouaisbaut, F. Wirtinger-based integral inequality: Application to time-delay systems. Automatica 2013, 49, 2860–2866. [Google Scholar] [CrossRef]
- Lee, W.I.; Lee, S.Y.; Park, P. Affine Bessel-Legendre inequality: Application to stability analysis for systems with time-varying delays. Automatica 2018, 93, 535–539. [Google Scholar] [CrossRef]
- Zeng, H.B.; Liu, X.G.; Wang, W. A generalized free-matrix-based inequality for stability analysis of time-varying delay systems. Appl. Math. Comput. 2019, 354, 1–8. [Google Scholar] [CrossRef]
- Datta, R.; Dey, R.; Bhattacharya, B.; Saravanakumar, R.; Ahn, C.K. New double integral inequality with application to stability analysis for linear retarded systems. IET Control Theory Appl. 2019, 13, 1514–1524. [Google Scholar] [CrossRef]
- Park, P.; Ko, J.W.; Jeong, C. Reciprocally convex approach to stability of systems with time-varying delays. Automatica 2011, 47, 235–238. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Seuret, A.; Gouaisbaut, F. An improved reciprocally convex inequality and an augmented Lyapunov-Krasovskii functional for stability of linear systems with time-varying delay. Automatica 2017, 84, 221–226. [Google Scholar] [CrossRef]
- Zhu, L.; Zhao, H. Dynamical behaviours and control measures of rumour-spreading model with consideration of network topology. Int. J. Syst. Sci. 2019, 48, 2064–2078. [Google Scholar] [CrossRef]
- Zhu, L.; Guan, G. Dynamical analysis of a rumor spreading model with self-discrimination and time delay in complex networks. Phys. A Stat. Mech. Its Appl. 2019, 533, 121953. [Google Scholar] [CrossRef]
- Zhu, L.; Liu, W.; Zhang, Z. Delay differential equations modeling of rumor propagation in both homogeneous and heterogeneous networks with a forced silence function. Appl. Math. Comput. 2020, 370, 124925. [Google Scholar] [CrossRef]
- Zhu, L.; Zhou, M.; Zhang, Z. Dynamical analysis and control strategies of rumor spreading models in both homogeneous and heterogeneous networks. J. Nonlinear Sci. 2020, 30, 2545–2576. [Google Scholar] [CrossRef]
- Cheng, Y.; Huo, L.; Zhao, L. Dynamical behaviors and control measures of rumor-spreading model in consideration of the infected media and time delay. Inf. Sci. 2021, 564, 237–253. [Google Scholar] [CrossRef]
- Cao, B.; Guan, G.; Shen, S.; Zhu, L. Dynamical behaviors of a delayed SIR information propagation model with forced silence function and control measures in complex networks. Eur. Phys. J. Plus 2023, 138, 402. [Google Scholar] [CrossRef]
- Ma, Y.; Xie, L.; Liu, S.; Chu, X. Dynamical behaviors and event-triggered impulsive control of a delayed information propagation model based on public sentiment and forced silence. Eur. Phys. J. Plus 2023, 138, 979. [Google Scholar] [CrossRef]
- Ding, N.; Guan, G.; Shen, S.; Zhu, L. Dynamical behaviors and optimal control of delayed S2IS rumor propagation model with saturated conversion function over complex networks. Commun. Nonlinear Sci. Numer. Simul. 2024, 128, 107603. [Google Scholar] [CrossRef]
- Luo, X.; Jiang, H.; Li, J.; Chen, S.; Xia, Y. Modeling and controlling delayed rumor propagation with general incidence in heterogeneous networks. Int. J. Mod. Phys. C 2024, 35, 2450020. [Google Scholar] [CrossRef]
- Ghosh, M.; Das, P. Analysis of online misinformation spread model incorporating external noise and time delay and control of media effort. Differ. Equ. Dyn. Syst. 2025, 33, 261–301. [Google Scholar] [CrossRef]
- Ghosh, M.; Das, S.; Das, P. Dynamics and control of delayed rumor propagation through social networks. J. Appl. Math. Comput. 2022, 68, 3011–3040. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Y.; Huo, L.; Zhao, L. Stability analysis and optimal control of rumor spreading model under media coverage considering time delay and pulse vaccination. Chaos Solitons Fractals 2022, 157, 111931. [Google Scholar] [CrossRef]
- Huo, L.; Chen, X. Dynamical analysis of a stochastic rumor-spreading model with Holling II functional response function and time delay. Adv. Differ. Equ. 2020, 2020, 651. [Google Scholar] [CrossRef] [PubMed]
- Li, C. A study on time-delay rumor propagation model with saturated control function. Adv. Differ. Equ. 2017, 2017, 255. [Google Scholar] [CrossRef]
- Guo, H.; Yan, X.; Niu, Y.; Zhang, J. Dynamic analysis of rumor propagation model with media report and time delay on social networks. J. Appl. Math. Comput. 2023, 69, 2473–2502. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Huo, L.; Zhao, L. An improved two-layer model for rumor propagation considering time delay and event-triggered impulsive control strategy. Chaos Solitons Fractals 2022, 164, 112711. [Google Scholar] [CrossRef]
- Xiao, D.; Ruan, S. Global analysis of an epidemic model with nonmonotone incidence rate. Math. Biosci. 2007, 208, 419–429. [Google Scholar] [CrossRef]
- Buonomo, B.; Salvatore Rionero, S. On the Lyapunov stability for SIRS epidemic models with general nonlinear incidence rate. Appl. Math. Comput. 2010, 217, 4010–4016. [Google Scholar] [CrossRef]
- Diekmann, O.; Heesterbeek, J.A.P.; Metz, J.A.J. On the definition and the computation of the basic reproduction ratio R0 in models for infectious diseases in heterogeneous populations. J. Math. Biol. 1990, 28, 365–382. [Google Scholar] [CrossRef]
- van den Driessche, P.; Watmough, J. Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission. Math. Biosci. 2002, 180, 29–48. [Google Scholar] [CrossRef]
- Wei, H.; Li, X.; Martcheva, M. An epidemic model of a vector-borne disease with direct transmission and time delay. J. Math. Anal. Appl. 2008, 342, 895–908. [Google Scholar] [CrossRef]
- Ruan, S.; Wei, J. On the zeros of transcendental functions with applications to stability of delay differential equations with two delays. Dyn. Contin. Discret. Impuls. Syst. 2003, 10, 863–874. [Google Scholar]
- Li, Q.; Zhang, Q.; Si, L.; Liu, Y. Rumor Detection on Social Media: Datasets, Methods and Opportunities. In Proceedings of the Second Workshop on Natural Language Processing for Internet Freedom: Censorship, Disinformation, and Propaganda, Hong Kong, China, 4 November 2019; Association for Computational Linguistics: Stroudsburg, PA, USA, 2019. [Google Scholar]
- Nasser, M.; Arshad, N.I.; Ali, A.; Alhussian, H.; Saeed, F.; Da’u, A.; Nafea, I. A systematic review of multimodal fake news detection on social media using deep learning models. Results Eng. 2025, 26, 104752. [Google Scholar] [CrossRef]
- Blaquiere, A. Impulsive optimal control with finite or infinite time horizon. J. Optim. Theory Appl. 1985, 46, 431–439. [Google Scholar] [CrossRef]
- Sun, H.; Yang, X.; Yang, L.X.; Huang, K.; Li, G. Impulsive artificial defense against advanced persistent threat. IEEE Trans. Inf. Forensics Secur. 2023, 18, 3506–3516. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, H.; Hu, C.; Yu, Z.; Li, J. Stability and Hopf bifurcation analysis of multi-lingual rumor spreading model with nonlinear inhibition mechanism. Chaos Solitons Fractals 2021, 153, 111464. [Google Scholar] [CrossRef]
- Huang, K.; Yang, X.; Yang, L.X.; Zhu, Y.; Li, G. Mitigating the impact of a false Message through sequential release of clarifying messages. IEEE Trans. Netw. Sci. Eng. 2024, 11, 1785–1798. [Google Scholar] [CrossRef]
- Owen, G. Game Theory; Emerald Group Pub. Ltd.: Leeds, UK, 2013. [Google Scholar]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, C.; Liu, G.; Yang, X.; Qin, Y.; Yang, L. A Rumor-Spreading Model with Three Identical Time Delays. Mathematics 2025, 13, 1421. https://doi.org/10.3390/math13091421
Fu C, Liu G, Yang X, Qin Y, Yang L. A Rumor-Spreading Model with Three Identical Time Delays. Mathematics. 2025; 13(9):1421. https://doi.org/10.3390/math13091421
Chicago/Turabian StyleFu, Chunlong, Guofang Liu, Xiaofan Yang, Yang Qin, and Luxing Yang. 2025. "A Rumor-Spreading Model with Three Identical Time Delays" Mathematics 13, no. 9: 1421. https://doi.org/10.3390/math13091421
APA StyleFu, C., Liu, G., Yang, X., Qin, Y., & Yang, L. (2025). A Rumor-Spreading Model with Three Identical Time Delays. Mathematics, 13(9), 1421. https://doi.org/10.3390/math13091421