All articles published by MDPI are made immediately available worldwide under an open access license. No special
permission is required to reuse all or part of the article published by MDPI, including figures and tables. For
articles published under an open access Creative Common CC BY license, any part of the article may be reused without
permission provided that the original article is clearly cited. For more information, please refer to
https://www.mdpi.com/openaccess.
Feature papers represent the most advanced research with significant potential for high impact in the field. A Feature
Paper should be a substantial original Article that involves several techniques or approaches, provides an outlook for
future research directions and describes possible research applications.
Feature papers are submitted upon individual invitation or recommendation by the scientific editors and must receive
positive feedback from the reviewers.
Editor’s Choice articles are based on recommendations by the scientific editors of MDPI journals from around the world.
Editors select a small number of articles recently published in the journal that they believe will be particularly
interesting to readers, or important in the respective research area. The aim is to provide a snapshot of some of the
most exciting work published in the various research areas of the journal.
For the first time, a numerical study is presented to demonstrate the importance of high-dimensional nonlinear dynamic systems of axially-deploying elevator cables in the nonlinear vibration and control of such time-varying-length structures, especially under the condition of external disturbance. Firstly, a multi-dimensional nonlinear dynamic system of an axially-deploying elevator cable is established using Hamilton’s principle and the Galerkin method, and a large-amplitude vibration of the system is specified. Then, the established nonlinear dynamic system of the elevator cable is extended to account for external disturbance. Furthermore, an adapted fuzzy sliding mode control strategy is applied to suppress the specified vibration in the nonlinear dynamic system involving external disturbance. From numerical simulations, it is discovered that different dimensions are required for nonlinear vibration and control of axially-deploying elevator cables. The study provides guidance on nonlinear vibration and control of axially-deploying elevator cables in high-dimensional nonlinear dynamic systems.
With the development of technology, the number of super-high-rise buildings is increasing, and they have become a symbol of urban modernization. For example, Burj Khalifa Tower, ranking first in the world with a height of 828 m, was built in 2010, and Shanghai Tower, with a height of 632 m, was built in 2017. As we all know, elevators are indispensable for vertical transportation in high-rise and super-high-rise buildings, and their number continues to grow. As of 2023, more than 1 billion people travel in 15 million elevators every day around the world [1]. As elevator operation speed and hoisting height increase, the elevator cables in the axial deployment process become more sensitive to unknown external disturbances in realistic deployment conditions, which may lead to abnormal vibrations [2]. Elevator cable vibrations not only affect passenger comfort but can also cause serious personal injury or even death. Currently, about 100 people die in elevator accidents each year [3]. Therefore, it is of great significance to study the dynamic characteristics of elevator cables and suppress cable vibrations during the axial deployment process.
In past decades, many scholars have conducted research on the linear dynamic systems of elevator cables. Zhu and Teppo [4] developed a scale model of an elevator to study the linear lateral dynamic response of elevator cables. Sandilo and van Horssen [5,6] studied the lateral vibration of elevator cables and analyzed the cables’ vibrations with linearly varying length and harmonically varying length, as well as the autoresonances of a deploying elevator cable. Wang and van Horssen [7] found that external disturbances imposed on the boundary can cause linear large-amplitude vibrations of an elevator cable in a flexible hoisting system and may induce damage to the operation of the hoisting system, including significant deformations and dynamic stresses in both machinery and structures, and may even lead to accidents. Xu et al. [8] modelled the elevator cable as a cantilever beam, investigated the tension–torsion coupling vibration of the cables, and introduced external disturbance into the established model to evaluate the corresponding adverse impact on ride comfort, eccentricity of traction wheel, and unevenness of guide rail.
Some scholars have also studied the nonlinear dynamic systems of elevator cables. Yang et al. [9] used Hamilton’s principle to derive a nonlinear dynamic model of the coupled vibrations of a building and elevator cables in the case of earthquake/wind excitation, verifying that the position and motion of the cage significantly affect cable vibrations. Pi et al. [10] presented a three-dimensional dynamic model of a multi-cable double-drum winding hoister and demonstrated the importance of the nonlinear dynamic system of an elevator cable. Furthermore, with studies on multi-dimensional nonlinear dynamics of axially-moving structures [11], some scholars have also studied the multi-dimensional nonlinear dynamic system of elevator cables. Wang et al. [12] applied the non-smooth generalized-α method to obtain the nonlinear responses of the twenty-dimensional nonlinear dynamic system of a multi-cable driven parallel suspension platform, concluding that controlling the lateral vibrations of the axially-deploying cables is important to ensure the system’s stability. Wang and Chen [13] also investigated the influence of the longitudinal vibrations of hoisting cables on the stability of the conveyance at the hoisting speed of 15 m/s.
In addition to axially-deploying cables, scholars have also studied nonlinear multi-dimensional dynamic systems of other time-varying-length structures based on axially-moving beams [14] and plates [15], all demonstrating that the nonlinear vibrations of such structures may cause structural failures. Thus, some scholars have developed vibration control strategies for nonlinear dynamic systems of elevator cables. In 2005, Zhang et al. [16] designed a Lyapunov controller to improve system stability by dissipating the vibratory energy of a time-varying-length transporter system. The following year, Zhang and Agrawal [17] also designed a controller based on the Lyapunov theory to suppress the transverse vibration of a horizontal cable transportation system at arbitrary axial velocity, considering external disturbance in the transportation system in order to avoid system performance degradation. In 2014, Dai et al. [18] studied the vibration synchronization of a three-dimensional nonlinear dynamic system of a deploying cable, while the high dimensions of the time-varying-length structure were not considered in vibration control.
Although nonlinear vibration control has always been an important research topic [19,20], it is worth noting that, so far, there has been limited research on the vibration control of nonlinear dynamic systems higher than four dimensions [21,22], and even fewer studies on the vibration control of high-dimensional nonlinear dynamic systems of axially-deploying elevator cables. Among many control strategies, sliding mode control (SMC) and other SMC-based strategies have been widely applied [23] in dynamic control under the condition of external disturbances. In 1992, SMC was proposed by Utkin and then introduced into many nonlinear dynamic studies [24]. In 2023, Tatar et al. [25] used the SMC strategy to mitigate the oscillation of input LC filter voltage and current to ensure system immunity to various disturbances. In 2006, fuzzy sliding mode control (FSMC) was proposed based on SMC for chaos synchronization of the dynamic systems subject to both uncertainties and external disturbances [26]. In 2021, Alain et al. [27] applied FSMC to study the robust fuzzy sliding mode synchronization of uncertain nonlinear systems featuring external disturbance, and the results showed that the robustness of FSMC was better than SMC. In 2023, Liu and Sun [28] proposed an adapted FSMC strategy in controlling the chaotic vibration of a two-dimensional nonlinear dynamic system of a laminated composite cantilever beam in the presence of external disturbance. The proposed control strategy is adapted from the existing FSMC strategy and can be applied in the vibration control of multi-dimensional nonlinear dynamic systems, while the existing FSMC is not available. In 2024, Sun et al. [29] implemented the proposed strategy for controlling the large amplitude limit cycle of a two-dimensional nonlinear dynamic system of a composite beam under the condition of external disturbance.
In previous studies on the nonlinear vibration and control of an axially-deploying elevator cable, few have been based on the high-dimensional nonlinear dynamic system of the time-varying-length structure, especially in the presence of external disturbance. Therefore, the present study focuses on the nonlinear vibration control of such a high-dimensional system under the condition of external disturbance. Firstly, an axially-deploying elevator cable is modeled using Hamilton’s principle, and the structure’s geometric nonlinearity is introduced with von Kármán-type deformation. Then, the derived model is nondimensionalized and discretized using the 6th-order Galerkin method to establish the high-dimensional nonlinear dynamic system of the studied time-varying-length structure. Correspondingly, the established system is extended to consider external disturbance. Furthermore, an adapted FSMC strategy is presented for the vibration control of the high-dimensional nonlinear dynamic system in the presence of external disturbance. In a numerical simulation, a large-amplitude vibration of the established multi-dimensional system is firstly specified in the case of no external disturbance, and then compared with the dynamic response in the case of external disturbance, and finally, the control strategy is applied for vibration suppression to demonstrate the importance of a high-dimensional nonlinear dynamic system in the nonlinear vibration and control of the studied time-varying-length structure in the presence of external disturbance.
2. Model Development
Figure 1 shows the schematic of the studied axially-deploying elevator cable: the Cartesian system describes the undeformed geometry of the axially-deploying elevator cable, and the cable is mounted between two simply-supported ends; is the time-varying length of the elevator cable during the deployment process, and its initial value at the beginning of deployment process is ; , , and are the constant deploying rate, cross-section area, and elastic modulus of the cable, respectively.
At the beginning of the deployment process, the undeformed elevator cable gives the displacement at any point of the time-varying-length structure, as shown below:
in which and are the unit vectors along and , respectively.
Hence, during the deployment process, the displacement field of the axially-deploying elevator cable is presented based on Equation (1) as
in which and are the displacements along and , respectively.
After the total derivation of Equation (2) with respect to time, it is derived that
and the kinetic energy of the axially-deploying elevator cable can be obtained as follows:
in which is the mass of the axially-deploying elevator cable per unit length, and is expressed as
To account for the geometric nonlinearity of the studied axially-deploying elevator cable, the von Kármán-type strain for large deflection in association with Equation (2) is given by
and then the strain energy of the axially-deploying elevator cable is
in which is expressed as
The virtual work is assumed to be 0 in the case of a constant deploying rate [18], given as
Based on Equations (3)–(5), Hamilton’s principle is employed as follows:
and , , and are substituted with , , and for the rest of the present study, and the equations of motion for the axially-deploying elevator cable can be derived as follows:
Based on simply-supported boundary conditions and Equation (6), it can be derived as follows [30]:
With Equation (8) introduced into Equation (7), the nonlinear governing equation of the axially-deploying elevator cable can be derived as follows:
3. Series Solution
To validate Equation (9), the non-dimensional variables are presented below:
After introducing the non-dimensional variables in Equation (10) into Equation (9) and omitting the bar above the non-dimensional variables for brevity, the non-dimensional nonlinear governing equation of the axially-deploying elevator cable can be obtained in the following equation:
in which is the second-order derivative of with respect to time, and the non-dimensional coefficient is presented as follows:
Based on the simply-supported boundary conditions of the axially-deploying elevator cable, the corresponding Galerkin method takes the following form:
in which is expressed as follows:
Therefore, with the following transformation,
Equation (11) can be discretized with the 6th-order Galerkin method in Equation (12) in the case of , and transformed into a 6-dimensional nonlinear dynamic system as presented in Equations (A1)–(A12) in Appendix A.
4. Introduction of External Disturbance
To account for uncertain factors in realistic deployment conditions, including boundary disturbances [7], external interferences [8,18], unmodelled dynamics, and structural inaccuracies [31,32] in the studied nonlinear cable system, a general approximation of external disturbance should be considered by following the previous study on axially-moving structures [18].
Therefore, with the introduction of into both the non-dimensional nonlinear governing equation of the axially-deploying elevator cable in Equation (11) and the corresponding six-dimensional nonlinear dynamic system of the cable in Equations (A1)–(A12), it can be derived in both Equation (13),
and Equations (A13)–(A24) in Appendix A, respectively.
5. Control Strategy
Corresponding to the multi-dimensional nonlinear dynamic system of the studied axially-deploying elevator cable in Equations (A13)–(A24), a control strategy proposed by Liu et al. [28,29] is applied for the vibration control of multi-dimensional nonlinear dynamic systems. Based on the adapted FSMC [28,29], the nonlinear governing equation of the axially-deploying elevator cable in Equation (13) with control applied takes the following form:
in which is the control input.
The application of the 6th-order Galerkin method provided in Equations (12) and (14) leads to a series of second-order differential equations involving as presented in Equations (A25)–(A36) in Appendix A.
Based on the adapted control [28,29], a desired reference takes the following form:
The control input in Equation (14) is then derived as
where and are given as
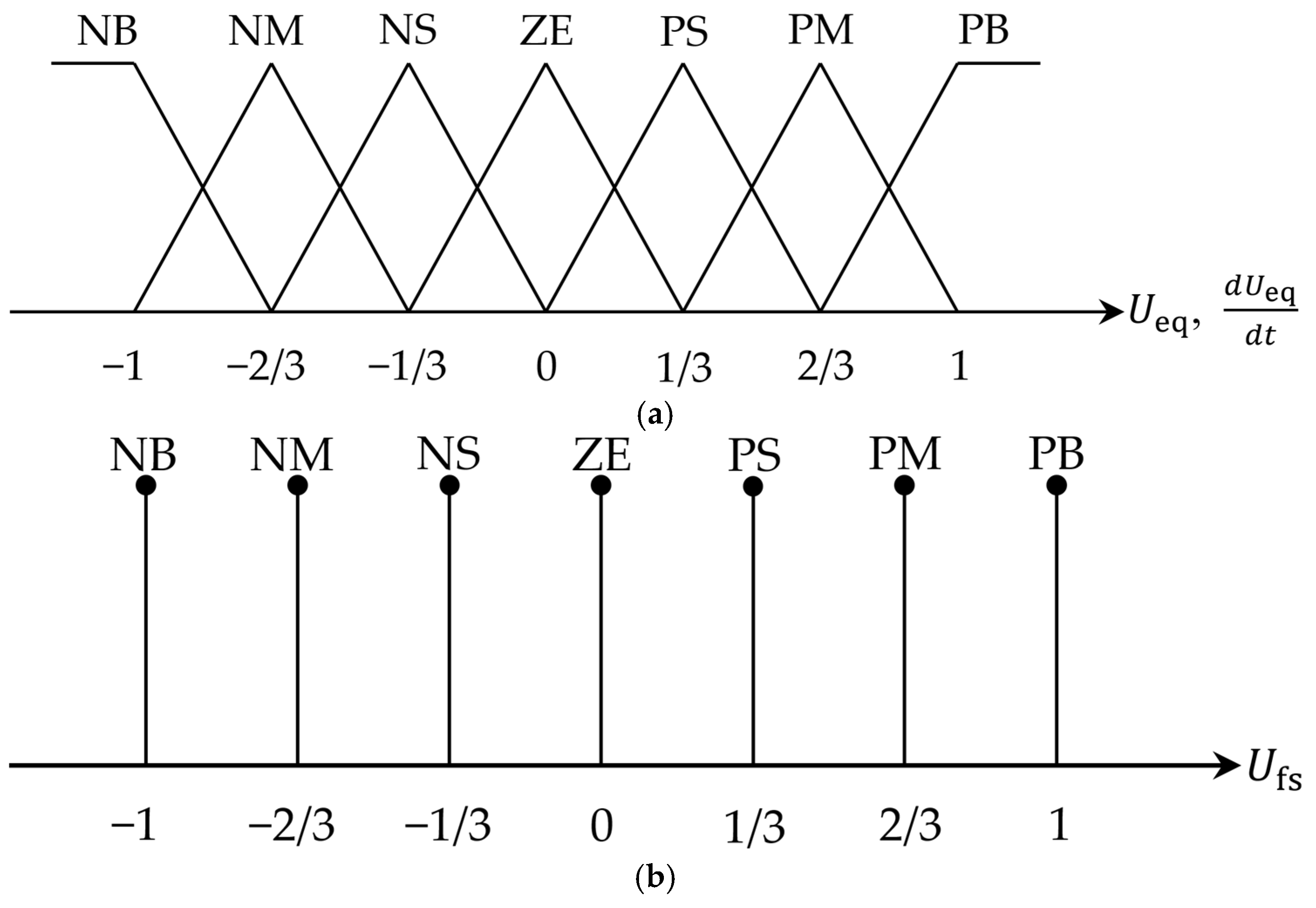
and is the transverse displacement of a specified point on the axially-deploying elevator cable, is the control parameter that governs the sliding surface, is given as , and follows the fuzzy rule in Table 1 [26].
In addition to Table 1, the membership functions for , , and are shown in Figure 2a,b [32,33].
6. Vibration and Control
In this section, the specific dimensions demanded in the vibration and control of an axially-deploying elevator cable are studied through three cases.
In the first case, without external disturbance considered as shown in Equations (11) and (A1)–(A12), a large-amplitude vibration at one specified point of the axially-deploying elevator cable was discovered and analyzed, and a three-dimensional nonlinear dynamic system of the studied elevator cable proved necessary in this case.
In the second case, with external disturbance considered as shown in Equations (13) and (A13)–(A24), the vibration of the elevator cable was studied and compared with the first case, and a four-dimensional nonlinear dynamic system of the studied elevator cable proved necessary in this case.
In the third case, with external disturbance considered in the control strategy as shown in Equations (14) and (A25)–(A36), the vibration control of the elevator cable was implemented to suppress the vibration specified in the second case, and a five-dimensional nonlinear dynamic system of the studied elevator cable proved necessary in this case.
6.1. Vibration Without External Disturbance
In the case of vibrations without external disturbance, the elevator cable axially deployed from an initial length of to m, and the coefficients of the axially-deploying elevator cable are given as follows:
Based on the 6th-order Galerkin method in Equation (12), the transverse displacement of the specified point (), which is the middle point of the elevator cable at the beginning of the deployment, takes the following expression:
Correspondingly, the initial conditions () are given as follows:
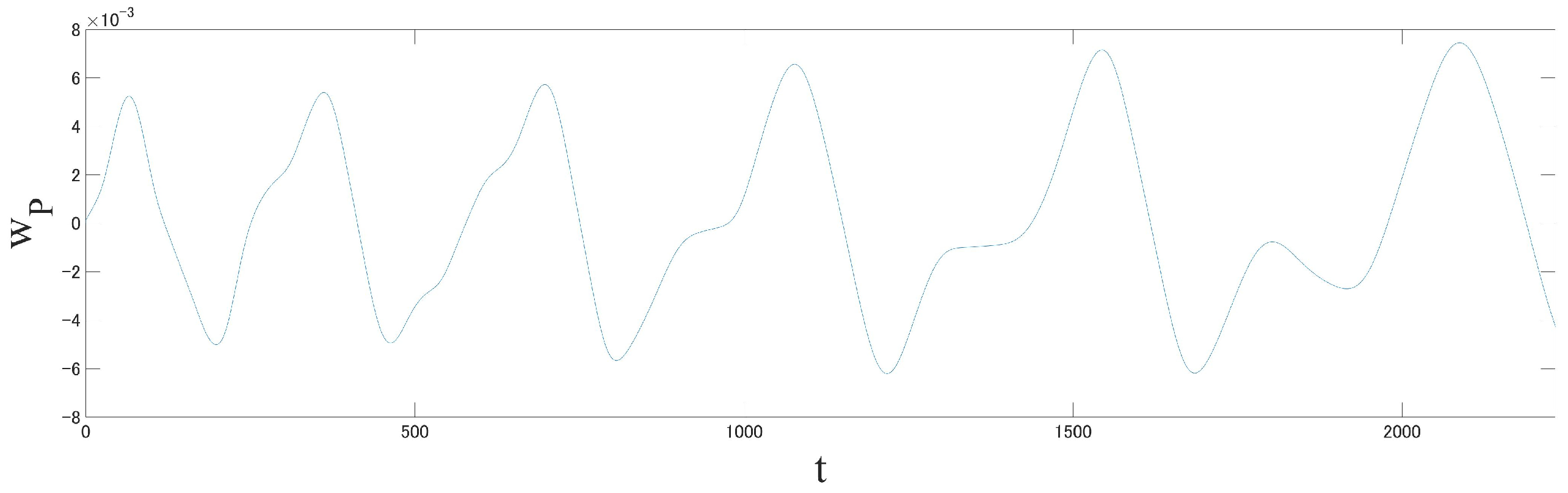
Figure 3 shows a large-amplitude vibration discovered at the specified point of the axially-deploying elevator cable. During the deployment process, the amplitude of at the specified point gradually increased from about 0.005210 to about 0.007428, which corresponds to about 0.1563m and 0.2228m based on the non-dimensional variables in Equation (10) and the given coefficients in Equation (18).
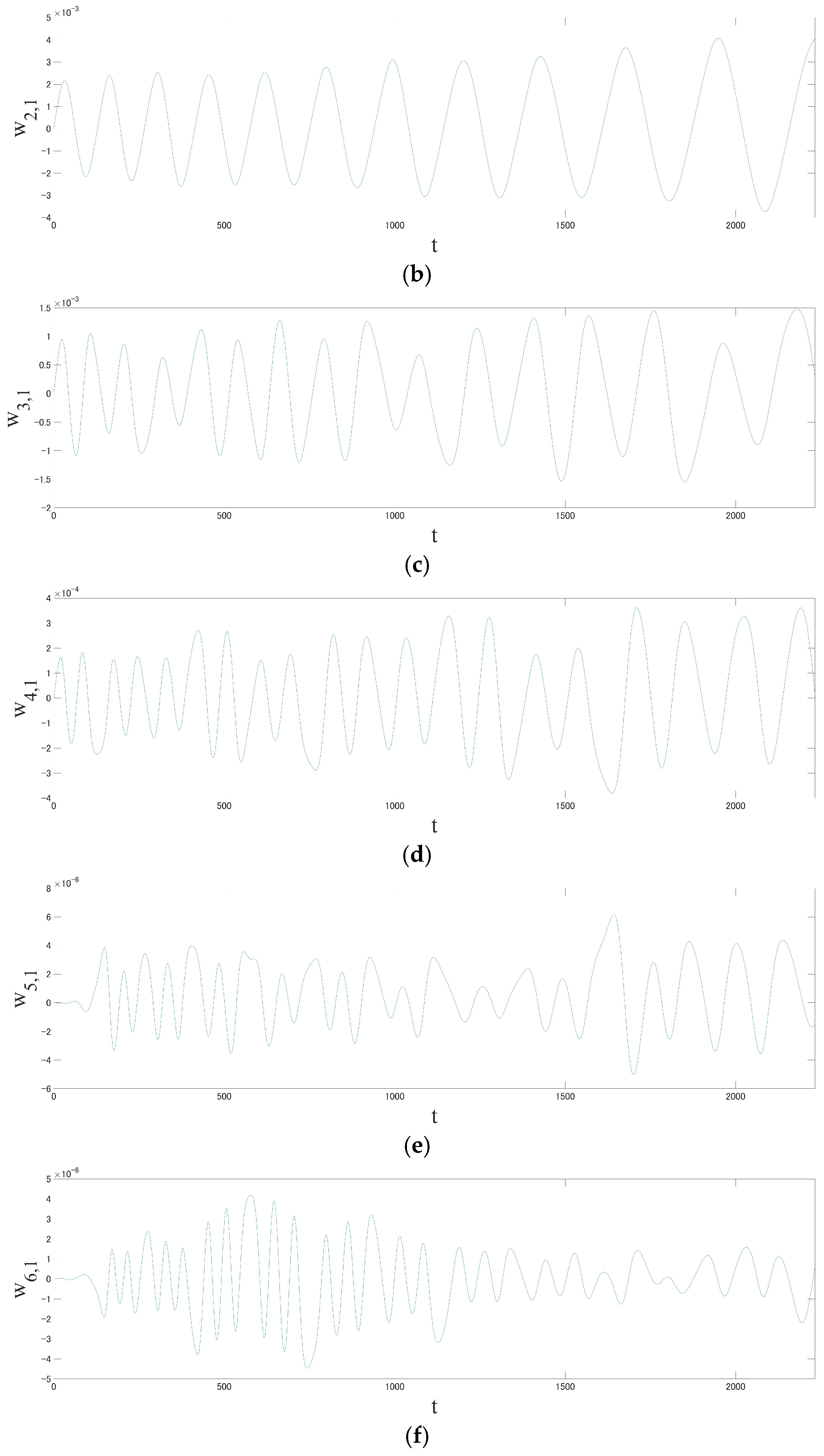
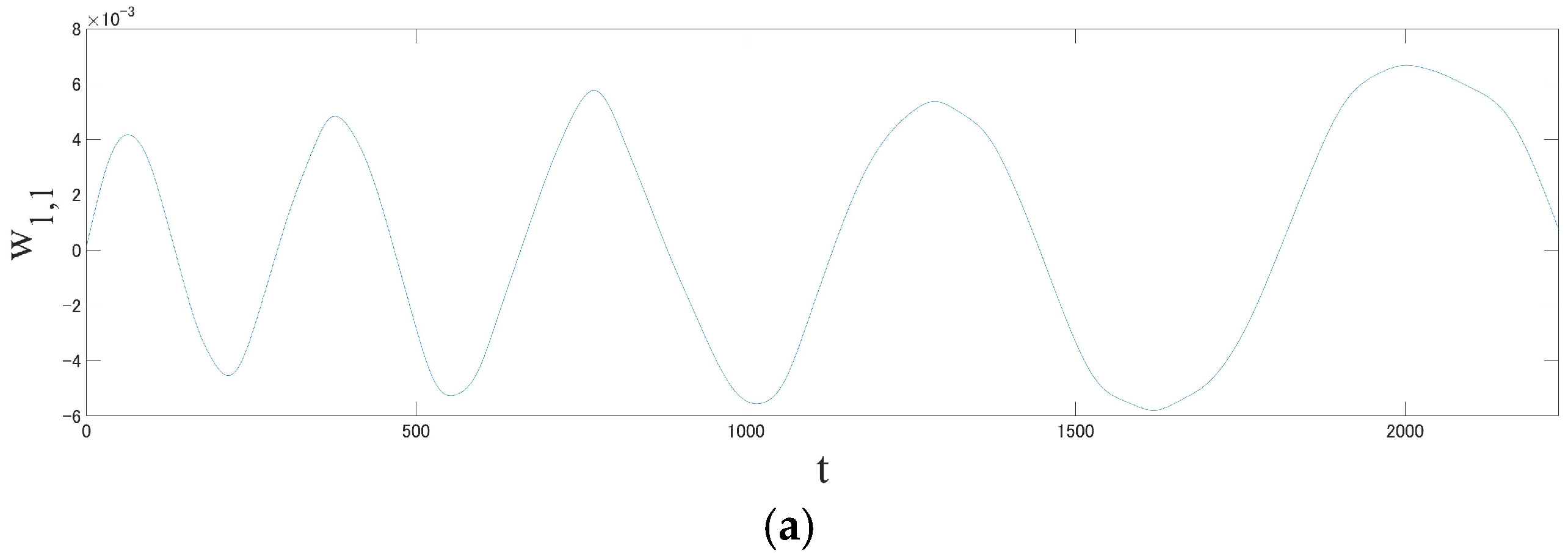
Figure 4 shows the vibrations of the first six vibration modes at the specified point of the axially-deploying elevator cable. From Figure 4a–c, it can be seen that the largest amplitudes of the first three vibration modes , , and are about 0.005805, 0.004067, and 0.001548, respectively; the corresponding relative values to that of are about 78.15%, 54.75%, and 20.84%, respectively. Therefore, the first three vibration modes must be considered when comparing with in Figure 3.
However, from Figure 4d–f, it can be seen that the largest amplitudes of , , and are quite small compared to the largest amplitudes of . Specifically, they are about 0.0003773, 0.0000061, and 0.0000045, respectively; their corresponding relative values to that of are about 5.08%, 00.08%, and 00.06%, respectively. Therefore, , , and can be excluded to simplify the numerical study of the vibration of axially-deploying elevator cables.
That is, in the case of vibrations without external disturbance, the previously established high-dimensional nonlinear dynamic system in Equations (A1)–(A12) is not necessary, since only the first three dimensions are dominant during the deployment process.
6.2. Vibration with External Disturbance
In the case of vibration with external disturbance, the elevator cable axially deployed from an initial length of to , and the coefficients of the axially-deploying elevator cable are given as the same in Equations (18)–(20).
Based on the previous study [34], the external disturbance in Equations (13) is given as follows:
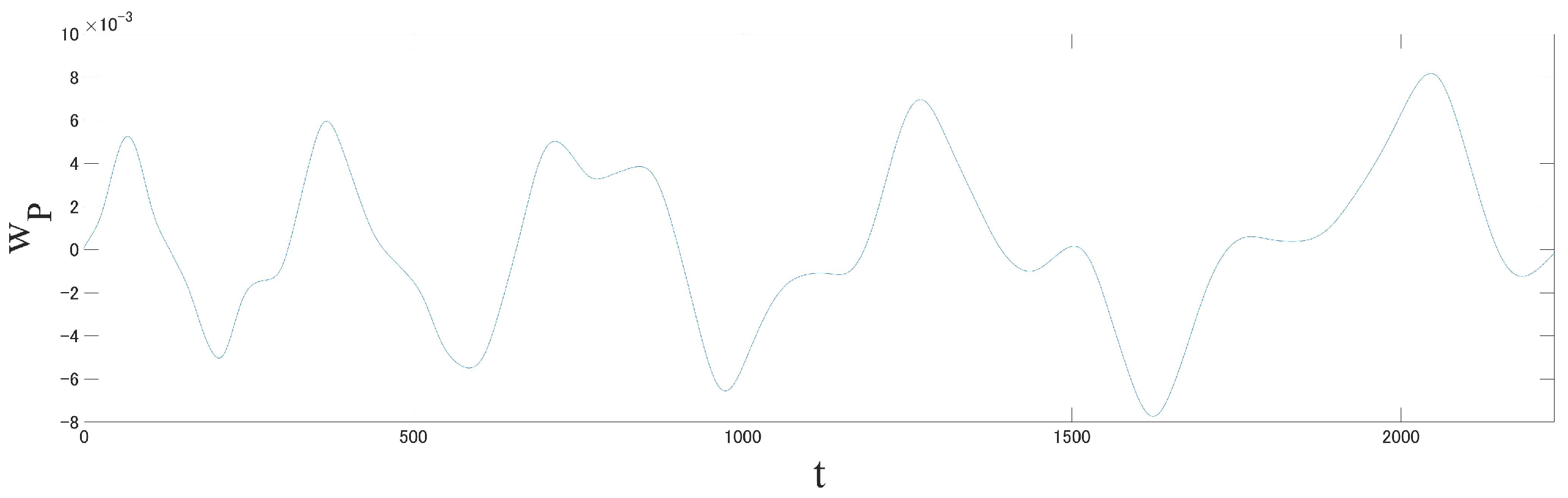
Figure 5 presents a large-amplitude vibration at the specified point of the axially-deploying elevator cable. Throughout the deployment process, the amplitude of at the specified point gradually increased from about 0.005254 to about 0.008173, which are about 0.1576 m and 0.2452 m according to the non-dimensional variables in Equation (10) and the given coefficients in Equation (18).
Comparing with the largest amplitude in the previous case, it was discovered that the introduction of the external disturbance in Equations (13) and (20) led to an over 10.00% increase in the largest amplitude of the cable vibration during the elevator cable deployment. That is, the large-amplitude vibration in the previous case (as shown in Figure 3) was further increased due to the introduction of external disturbance. Despite the gradually increasing period, vibrations with such large amplitude have to be suppressed to ensure operation safety of elevator systems.
Figure 6 shows the vibrations of the first six vibration modes at the specified point of the axially-deploying elevator cable in the case of external disturbance. From Figure 6a–d, it can be seen that the largest amplitudes of the first four vibration modes , , , and are about 0.006671, 0.003425, 0.001963, and 0.000912, respectively; the corresponding relative values to that of in Figure 5 are about 81.62%, 41.91%, 24.02%, and 11.16%, respectively. Therefore, the first four vibration modes must be considered when comparing with in Figure 5.
However, from Figure 6e,f, it can be learned that the largest amplitudes of and are very small compared to the largest amplitudes of in Figure 5. Specifically, they are about 0.0001286 and 0.0000021, respectively; their corresponding relative values to that of in Figure 5 are about 1.57% and 0.03%. Therefore, both and can be omitted to reduce calculation burden in numerical studies on the vibration of axially-deploying elevator cables.
In the case of vibration with external disturbance, included in Equation (13), the previously established high-dimensional nonlinear dynamic system in Equations (A13)–(A24) would be adequate for precise numerical simulations of axially-moving elevator cables, since the first four dimensions of the system are indispensable. Thus, compared with the previous case, the introduction of external disturbance not only resulted in a lager vibration of the studied elevator cable, but also demanded a high-dimensional nonlinear dynamic system, which had to be one dimension higher than the one required in the previous case.
6.3. Vibration Control with External Disturbance
Corresponding to the large-amplitude vibration in Figure 5, the vibration control strategy featuring the introduction of external disturbance in Equations (14)–(17) and (A25)–(A36) was applied at as shown in Figure 7 and Figure 8. The control parameters are presented as follows:
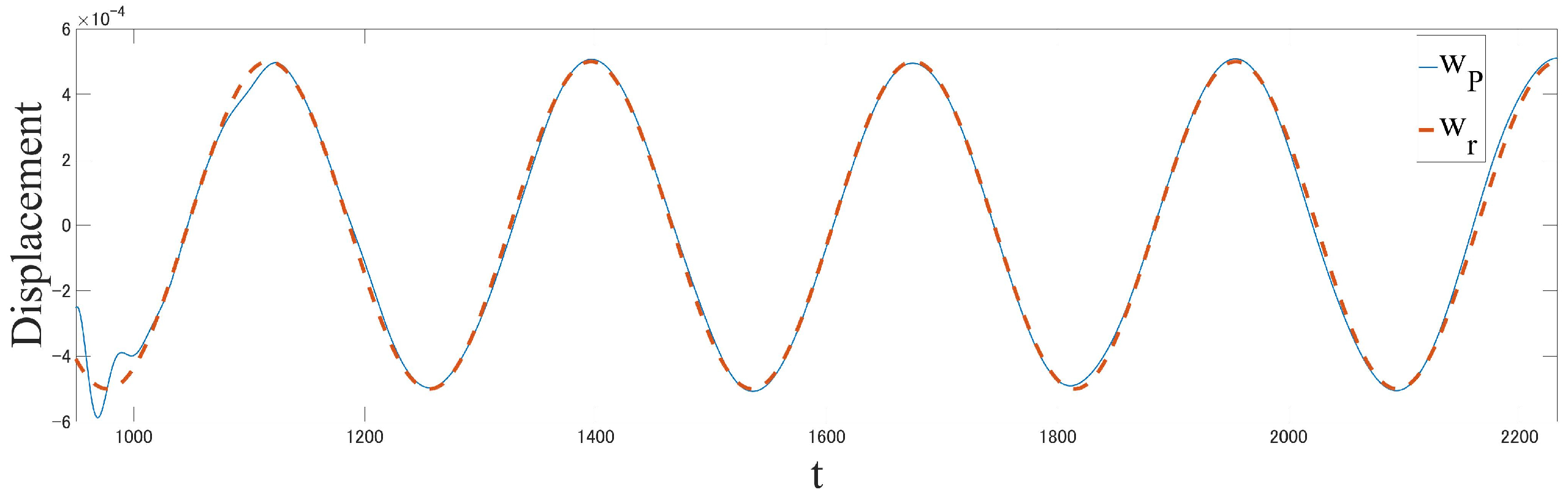
As shown in Figure 7, the synchronization process was completed in approximately 50 non-dimensional time units after the control was applied at , and the vibration of was well suppressed, with the largest amplitude shown in Figure 5 greatly reduced. Therefore, the well-suppressed vibration fully demonstrates the effectiveness of the control strategy in Equations (14)–(17) and (A25)–(A36) under the condition of external disturbance.
As shown in Figure 8, the fast synchronization process is further demonstrated in the displacement comparison between and under the condition of external disturbance. Once the control was applied at , the vibration of quickly synchronized within about 50 non-dimensional time units, and both the amplitude and the period of were very well synchronized. Particularly, the amplitude of was reduced from the largest value, 0.008173 in Figure 5, to about 0.00050 in Figure 8, showing a 93.88% decrease in vibration amplitude. Therefore, the very well-synchronized vibration at the specified point P fully demonstrates both the efficiency and effectiveness of the control strategy in Equations (14)–(17) and (A25)–(A36) in the vibration control of axially-deploying elevator cables, and the application of the control strategy under the condition of the external disturbance in Equation (22) also demonstrates the robustness of the control.
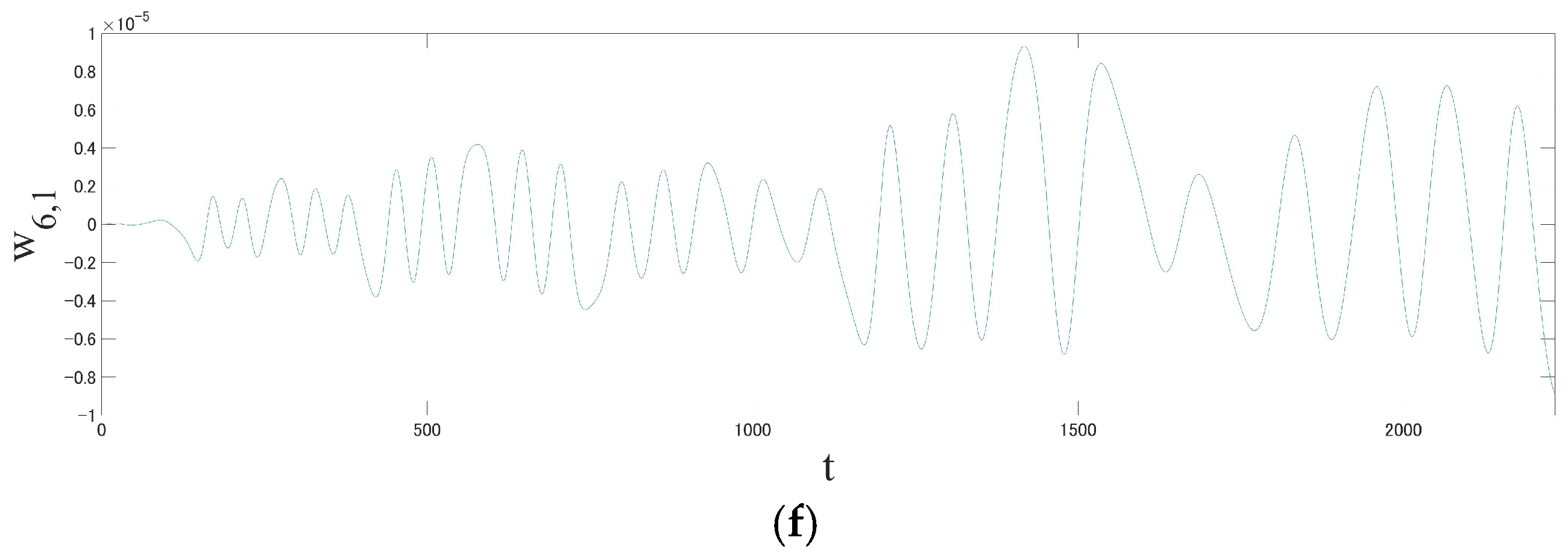
Figure 9 shows the vibrations of the first six vibration modes at the specified point of the axially-deploying elevator cable under the condition of external disturbance throughout the whole vibration control process. From Figure 9a–e, it can be seen that after control completed at , the largest amplitudes of , , , , and were about 0.005877, 0.003795, 0.001788, 0.0003938, and 0.0002934, respectively. Therefore, the first five vibration modes must be taken into consideration when comparing with in Figure 7 and Figure 8.
However, from Figure 9f, it is shown that after control completed at , the largest amplitudes of were quite small compared to the suppressed amplitude of in Figure 8. Specifically, the largest amplitude of was about 0.0000093, and its corresponding relative value to the suppressed amplitude of in Figure 8 was about 1.87%. Furthermore, the largest amplitude of was also negligible compared to the largest amplitudes of the first five vibration modes after the control completed at , as shown in Figure 9a–e. Thus, can be omitted to reduce calculation cost in numerical studies on the vibration control of axially-deploying elevator cables under the condition of external disturbance.
Therefore, in the case of vibration control to suppress the vibration of under the condition of external disturbance, the previously established high-dimensional nonlinear dynamic system in Equations (A25)–(A36) demands a high-dimensional nonlinear dynamic system, of which the specific dimensions required further increase from the four dimensions demanded in the second case to the five dimensions, as shown in Figure 9a–f.
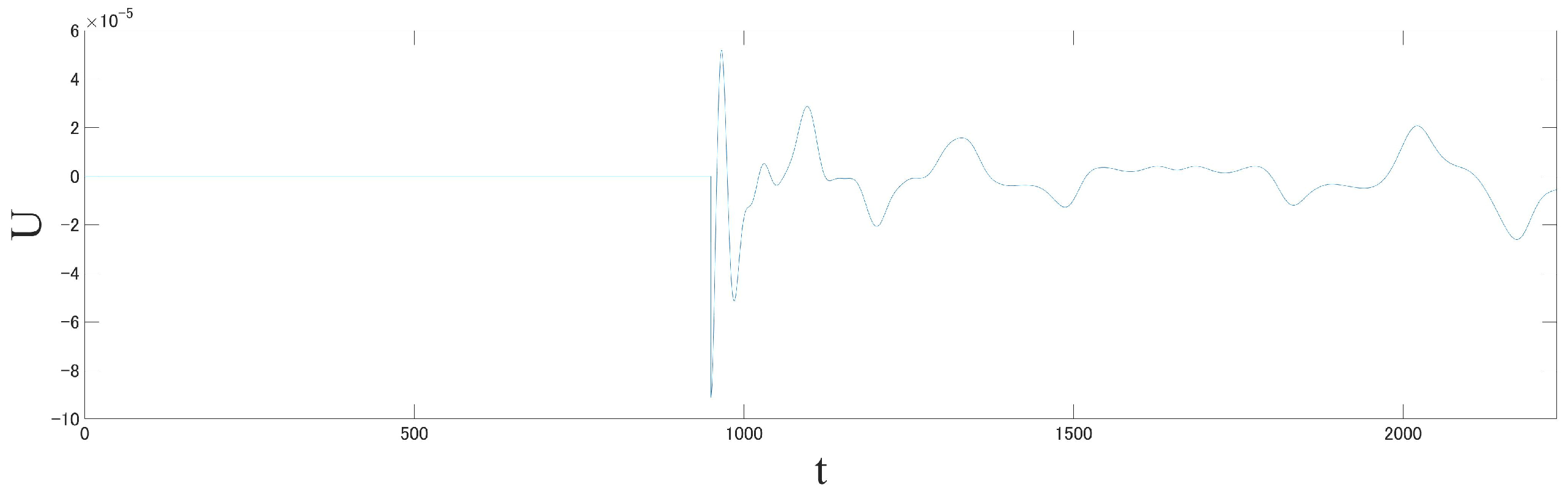
Figure 10 shows the control input required after the control was applied at . The largest control input value occurred at the very beginning of the control, and then a relatively small control input was required to maintain the synchronization for the rest of the axial-deployment process. Specifically, when control was applied at , the largest value of the control input demanded occurred, of which the magnitude was about 0.0000911 as shown in Figure 10. Then, after control completed at , the largest control input required was about 0.0000284 at and less than one-third of the value at , demonstrating the efficiency of the control strategy in Equations (14)–(17) and (A25)–(A36).
7. Conclusions
For the first time, the nonlinear vibration and control of high-dimensional nonlinear dynamic systems of axially-deploying elevator cables has been numerically studied and particularly analyzed under the condition of external disturbance. A six-dimensional nonlinear dynamic system of the time-varying-length structure was established and then further extended to account for external disturbance, and an adapted FSMC available for multi-dimensional nonlinear systems was applied to suppress the large-amplitude vibration specified in the established high-dimensional system under the condition of external disturbance. Based on the numerical simulations, the following should be emphasized:
(1/4) Although the nonlinear vibration of the studied axially-deploying elevator cable may not necessarily demand a corresponding multi-dimensional nonlinear dynamic system higher than a three-dimensional one, the vibration of such time-varying-length structures under the condition of external disturbance does demand a high-dimensional nonlinear dynamic system, such as a four-dimensional one in the present research, to ensure the accuracy of numerical studies on such axially-moving structures.
(2/4) Furthermore, under the condition of external disturbance, the vibration control of the studied elevator cable requires a high-dimensional nonlinear dynamic system, which may be higher than the one demanded in numerical studies without a control.
(3/4) The specific dimensions required for the studies on nonlinear vibration and control of axially-deploying elevator cables may be determined not only by the vibration studies without control but also by the studies with control applied.
(4/4) The large-amplitude vibration specified in the high-dimensional nonlinear dynamic system of the studied axially-deploying elevator cable can be effectively suppressed with the adapted FSMC strategy.
8. Future Development
Firstly, experimental studies need to be performed not only to verify the mathematic simulation presented in the current study but also to account for various uncertain factors in the realistic deployment of elevator cables, such as structural inaccuracies. Secondly, nonlinear damping effects, as well as the nonlinear effects of restoring forces, should be considered in model development and corresponding simulations to better reflect the practical operation condition of elevator cables. Thirdly, external forces, including friction and wind load, should be taken into account in order to simulate the daily operation of elevator cables and hence strengthen the application of the current study.
Author Contributions
Methodology, L.S. and X.L.; investigation, L.S. and F.H.; data curation, F.H.; writing—original draft, L.S.; writing—review and editing, X.L.; supervision, X.L.; funding acquisition, L.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (NNSFC) through the grant No. 11602234, and the talent scientific research fund of LIAONING PETROCHEMICAL UNIVERSITY (No. 2017XJJ-058).
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A
in which is the constant deploying rate of the elevator cable and takes the following expression,
in which for is obtained with the 6th-order Galerkin method in Equation (12), and the specific forms as well as the expression of are presented as follows,
in which for is obtained with the 6th-order Galerkin method in Equation (12), and their specific forms are presented as follows,
References
Esteban, E.; Salgado, O.; Iturrospe, A.; Isasa, I. Virtual sensing-based monitoring and maintenance in elevators. Struct. Health Monit.2024, 23, 230–247. [Google Scholar] [CrossRef]
Zhu, W.D.; Ni, J. Energetics and stability of translating media with an arbitrarily varying Length. J. Vib. Acoust.2000, 122, 295–304. [Google Scholar] [CrossRef]
Duan, X.L.; Zhi, P.; Zhu, W.; Wei, H. Fuzzy adaptive PID speed controller design for modern elevator traction machine. Energy Rep.2023, 9, 175–183. [Google Scholar] [CrossRef]
Zhu, W.D.; Teppo, L.J. Design and analysis of a scaled model of a high-rise, high-speed elevator. J. Sound Vib.2003, 264, 707–731. [Google Scholar] [CrossRef]
Sandilo, S.H.; van Horssen, W.T. On variable length induced vibrations of a vertical string. J. Sound Vib.2014, 333, 2432–2449. [Google Scholar] [CrossRef]
Sandilo, S.H.; van Horssen, W.T. On a cascade of autoresonances in an elevator cable system. Nonlinear Dyn.2015, 80, 1613–1630. [Google Scholar] [CrossRef]
Wang, J.; van Horssen, W.T. Analysis of longitudinal oscillations in a vertically moving cable subject to nonclassical boundary conditions. Appl. Math. Model.2022, 111, 44–62. [Google Scholar] [CrossRef]
Xu, P.; Peng, Q.; Jin, F.; Xue, J.; Yuan, H. Theoretical and Experimental Study on Tension-Torsion Coupling Vibration for Time-Varying Elevator Traction System. Acta Mech. Solida Sin.2023, 36, 899–913. [Google Scholar] [CrossRef]
Yang, D.H.; Kim, K.Y.; Kwak, M.K.; Lee, S. Dynamic modeling and experiments on the coupled vibrations of building and elevator ropes. J. Sound Vib.2017, 390, 164–191. [Google Scholar] [CrossRef]
Pi, Y.; Zhang, J.; Tang, X.; Zhu, J. Three-dimensional dynamic modeling and simulation of a multi-cable winding hoister system considering bidirectional coupling between cage and flexible guides. J. Vib. Control2023, 29, 1678–1699. [Google Scholar] [CrossRef]
Chen, L.Q.; Zhang, N.H.; Zu, J.W. The regular and chaotic vibrations of an axially moving viscoelastic string based on fourth order Galerkin truncation. J. Sound Vib.2003, 261, 764–773. [Google Scholar] [CrossRef]
Yandong, W.; Guohua, C.; van Horssen, W.T. Dynamic simulation of a multi-cable driven parallel suspension platform with slack cables. Mech. Mach. Theory2018, 126, 329–343. [Google Scholar]
Wang, Y.; Chen, Z. Three-dimensional dynamic modelling and analysis of a dual-cable winding hoisting system. Int. J. Struct. Stab. Dyn.2024, 24, 2450178. [Google Scholar] [CrossRef]
Liu, Y. Nonlinear dynamic analysis of an axially moving composite laminated cantilever beam. J. Vib. Eng. Technol.2023, 11, 3307–3319. [Google Scholar] [CrossRef]
Zhang, W.; Lu, S.F.; Yang, X.D. Analysis on nonlinear dynamics of a deploying composite laminated cantilever plate. Nonlinear Dyn.2014, 76, 69–93. [Google Scholar] [CrossRef]
Zhang, Y.; Agrawal, S.K.; Hagedorn, P. Longitudinal vibration modeling and control of a flexible transporter system with arbitrarily varying cable lengths. J. Vib. Control2005, 11, 431–456. [Google Scholar] [CrossRef]
Zhang, Y.; Agrawal, S.K. Lyapunov controller design for transverse vibration of a cable-linked transporter system. Multibody Syst. Dyn.2006, 15, 287–304. [Google Scholar] [CrossRef]
Dai, L.; Sun, L.; Chen, C. Control of an extending nonlinear elastic cable with an active vibration control strategy. Commun. Nonlinear Sci. Numer. Simul.2014, 19, 3901–3912. [Google Scholar] [CrossRef]
Li, S.; Xu, R.; Kou, L. Suppressing homoclinic chaos for a class of vibro-impact oscillators by non-harmonic periodic excitations. Nonlinear Dyn.2024, 112, 10845–10870. [Google Scholar] [CrossRef]
Xiong, J.; Yu, R.; Liu, C. Steering control and stability analysis for an autonomous bicycle: Part I-theoretical framework and simulations. Nonlinear Dyn.2023, 111, 16705–16728. [Google Scholar] [CrossRef]
Soares, F.; Vergez, C.; Antunes, J.; Cochelin, B.; Debut, V.; Silva, F. Bifurcation analysis of cantilever beams in channel flow. J. Sound Vib.2023, 567, 117951. [Google Scholar] [CrossRef]
Ghayesh, M.H. Vibration characterisation of AFG microcantilevers in nonlinear regime. Microsyst. Technol.2019, 25, 3061–3069. [Google Scholar] [CrossRef]
Poznyak, A.S.; Orlov, Y.V. Utkin and Sliding Mode Control. J. Frankl. Inst.2023, 360, 12892–12921. [Google Scholar] [CrossRef]
Utkin, V.I. Sliding Modes in Control and Optimization; Springer: Berlin, Germany, 1992; pp. 180–183. [Google Scholar]
Tatar, K.; Chudzik, P.; Leśniewski, P. Sliding Mode Control of Buck DC–DC Converter with LC Input Filter. Energies2023, 16, 6983. [Google Scholar] [CrossRef]
Yau, H.T.; Kuo, C.L. Fuzzy sliding mode control for a class of chaos synchronization with uncertainties. Int. J. Nonlinear Sci. Numer. Simul.2006, 7, 333–338. [Google Scholar] [CrossRef]
Alain Soup, T.K.; Vannick, F.M.; Jacques, K. Robust prescribed-time stabilization for fuzzy sliding mode synchronization for uncertain chaotic systems. Eur. J. Control2021, 59, 29–37. [Google Scholar]
Liu, X.; Sun, L. Chaotic vibration control of a composite cantilever beam. Sci. Rep.2023, 13, 17946. [Google Scholar] [CrossRef]
Sun, L.; Li, X.D.; Liu, X. Control of large amplitude limit cycle of a multi-dimensional nonlinear dynamic system of a composite cantilever beam. Sci. Rep.2024, 14, 10771. [Google Scholar] [CrossRef]
Nayfeh, A.H.; Frank Pai, P. Linear and Nonlinear Structural Mechanics; WILEY-VCH Verlag GmbH & Co. KGaA: Weinheim, Germany, 2004; pp. 224–225. [Google Scholar]
Yau, H.T.; Wang, C.C.; Hsieh, C.T.; Cho, C.C. Nonlinear analysis and control of the uncertain micro-electro-mechanical system by using a fuzzy sliding mode control design. Comput. Math. Appl.2011, 61, 1912–1916. [Google Scholar] [CrossRef]
Arun Prasad, K.M.; Unnikrishnan, A.; Nair, U. Fuzzy sliding mode control of a switched reluctance motor. Procedia Technol.2016, 25, 735–742. [Google Scholar] [CrossRef]
Zhou, L.; Chen, G. Fuzzy sliding mode control of flexible spinning beam using a wireless piezoelectric stack actuator. Appl. Acoust.2017, 128, 40–44. [Google Scholar] [CrossRef]
Dai, L.; Chen, C.; Sun, L. An active control strategy for vibration control of an axially translating beam. J. Vib. Control2015, 21, 1188–1200. [Google Scholar] [CrossRef]
Figure 1.
The schematic of the axially-deploying elevator cable.
Figure 1.
The schematic of the axially-deploying elevator cable.
Figure 2.
Membership functions: (a) and ; (b) .
Figure 2.
Membership functions: (a) and ; (b) .
Figure 3.
The large-amplitude vibration at without external disturbance.
Figure 3.
The large-amplitude vibration at without external disturbance.
Figure 4.
The vibrations of the first six vibration modes without external disturbance: (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
Figure 4.
The vibrations of the first six vibration modes without external disturbance: (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
Figure 5.
The large-amplitude vibration at with external disturbance.
Figure 5.
The large-amplitude vibration at with external disturbance.
Figure 6.
The vibrations of the first six vibration modes with external disturbance: (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
Figure 6.
The vibrations of the first six vibration modes with external disturbance: (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
Figure 7.
The vibration control at with external disturbance.
Figure 7.
The vibration control at with external disturbance.
Figure 8.
The displacement comparison between the vibration at and the desired reference with external disturbance.
Figure 8.
The displacement comparison between the vibration at and the desired reference with external disturbance.
Figure 9.
The vibrations of the first six vibration modes with external disturbance: (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
Figure 9.
The vibrations of the first six vibration modes with external disturbance: (a) ; (b) ; (c) ; (d) ; (e) ; (f) .
Figure 10.
Control input.
Figure 10.
Control input.
Table 1.
The fuzzy rule of .
Table 1.
The fuzzy rule of .
PB
PM
PS
ZE
NS
NM
NB
PB
NB
NB
NB
NB
NM
NS
ZE
PM
NB
NB
NB
NM
NS
ZE
PS
PS
NB
NB
NM
NS
ZE
PS
PM
ZE
NB
NM
NS
ZE
PS
PM
PB
NS
NM
NS
ZE
PS
PM
PB
PB
NM
NS
ZE
PS
PM
PB
PB
PB
NB
ZE
PS
PM
PB
PB
PB
PB
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
Sun, L.; Hou, F.; Liu, X.
Nonlinear Vibration Control of a High-Dimensional Nonlinear Dynamic System of an Axially-Deploying Elevator Cable. Mathematics2025, 13, 1289.
https://doi.org/10.3390/math13081289
AMA Style
Sun L, Hou F, Liu X.
Nonlinear Vibration Control of a High-Dimensional Nonlinear Dynamic System of an Axially-Deploying Elevator Cable. Mathematics. 2025; 13(8):1289.
https://doi.org/10.3390/math13081289
Chicago/Turabian Style
Sun, Lin, Feilong Hou, and Xiaopei Liu.
2025. "Nonlinear Vibration Control of a High-Dimensional Nonlinear Dynamic System of an Axially-Deploying Elevator Cable" Mathematics 13, no. 8: 1289.
https://doi.org/10.3390/math13081289
APA Style
Sun, L., Hou, F., & Liu, X.
(2025). Nonlinear Vibration Control of a High-Dimensional Nonlinear Dynamic System of an Axially-Deploying Elevator Cable. Mathematics, 13(8), 1289.
https://doi.org/10.3390/math13081289
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.
Article Metrics
No
No
Article Access Statistics
For more information on the journal statistics, click here.
Multiple requests from the same IP address are counted as one view.
Sun, L.; Hou, F.; Liu, X.
Nonlinear Vibration Control of a High-Dimensional Nonlinear Dynamic System of an Axially-Deploying Elevator Cable. Mathematics2025, 13, 1289.
https://doi.org/10.3390/math13081289
AMA Style
Sun L, Hou F, Liu X.
Nonlinear Vibration Control of a High-Dimensional Nonlinear Dynamic System of an Axially-Deploying Elevator Cable. Mathematics. 2025; 13(8):1289.
https://doi.org/10.3390/math13081289
Chicago/Turabian Style
Sun, Lin, Feilong Hou, and Xiaopei Liu.
2025. "Nonlinear Vibration Control of a High-Dimensional Nonlinear Dynamic System of an Axially-Deploying Elevator Cable" Mathematics 13, no. 8: 1289.
https://doi.org/10.3390/math13081289
APA Style
Sun, L., Hou, F., & Liu, X.
(2025). Nonlinear Vibration Control of a High-Dimensional Nonlinear Dynamic System of an Axially-Deploying Elevator Cable. Mathematics, 13(8), 1289.
https://doi.org/10.3390/math13081289
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}