

Event-Based Quantized Dissipative Filtering for Nonlinear Networked Systems


Abstract
1. Introduction
2. Problem Formulation
2.1. Nonlinear Plant
2.2. Dynamic Event-Triggered Mechanism and Dynamic Quantizer
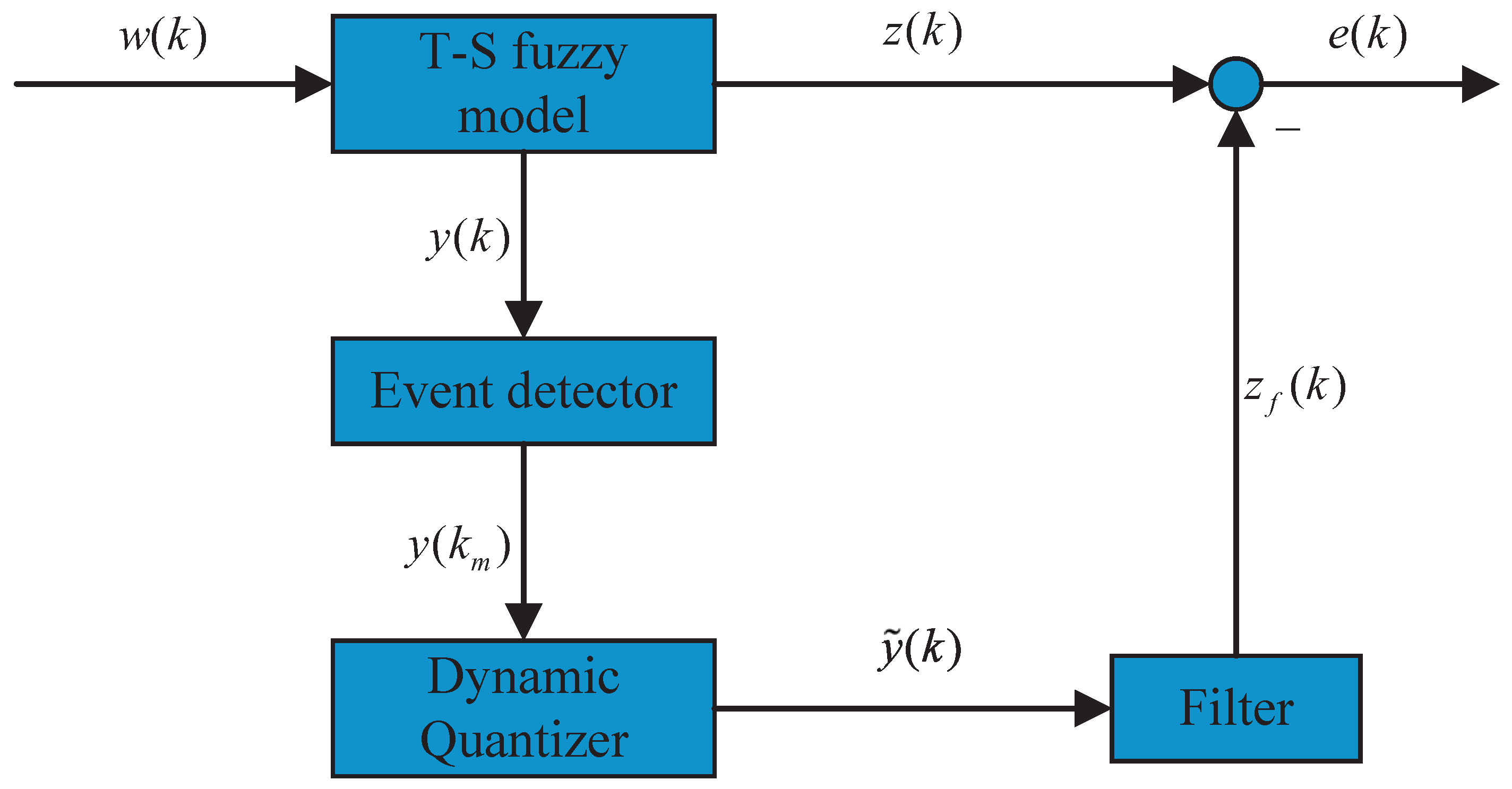
2.3. Filtering Error Systems
3. Main Results
3.1. Filtering Performance Analysis
3.2. Filter Design
4. Simulation Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, D.; Shi, P.; Wang, Q.-G.; Yu, L. Analysis and synthesis of networked control systems: A survey of recent advances and challenges. ISA Trans. 2017, 66, 376–392. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Park, J.H.; Zhang, L.; Zhu, Y. An asynchronous operation approach to event-triggered control for fuzzy markovian jump systems with general switching policies. IEEE Trans. Fuzzy Syst. 2016, 26, 6–18. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.-L.; Wang, Z. A dynamic event-triggered transmission scheme for distributed setmembership estimation over wireless sensor networks. IEEE Trans. Cybern. 2017, 49, 171–183. [Google Scholar] [CrossRef] [PubMed]
- Zha, L.; Liao, R.; Liu, J.; Cao, J.; Xie, X. Dynamic event-triggered security control of cyber-physical systems against missing measurements and cyber-attacks. Neurocomputing 2022, 500, 405–412. [Google Scholar] [CrossRef]
- Li, Q.; Wang, Z.; Sheng, W.; Alsaadi, F.E.; Alsaadi, F.E. Dynamic event-triggered mechanism for H∞ non-fragile state estimation of complex networks under randomly occurring sensor saturations. Inf. Sci. 2020, 509, 304–316. [Google Scholar] [CrossRef]
- Cheng, J.; Park, J.H.; Cao, J.; Qi, W. Asynchronous partially mode-dependent filtering of network-based msrsnss with quantized measurement. IEEE Trans. Cybern. 2019, 50, 3731–3739. [Google Scholar] [CrossRef]
- Chang, X.-H.; Xiong, J.; Li, Z.-M.; Park, J.H. Quantized static output feedback control for discrete-time systems. IEEE Trans. Ind. Inform. 2017, 14, 3426–3435. [Google Scholar] [CrossRef]
- Liberzon, D. Hybrid feedback stabilization of systems with quantized signals. Automatica 2003, 39, 1543–1554. [Google Scholar] [CrossRef]
- Gao, F.; Zhu, C.; Huang, J.; Wu, Y. Global fixed-time output feedback stabilization of perturbed planar nonlinear systems. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 707–711. [Google Scholar] [CrossRef]
- Gao, F.; Chen, C.-C.; Huang, J.; Wu, Y. Prescribed-time stabilization of uncertain planar nonlinear systems with output constraints. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 2887–2891. [Google Scholar] [CrossRef]
- Liu, Y.; Park, J.H.; Guo, B.-Z.; Shu, Y. Further results on stabilization of chaotic systems based on fuzzy memory sampled-data control. IEEE Trans. Fuzzy Syst. 2017, 26, 1040–1045. [Google Scholar] [CrossRef]
- Lee, S. Novel stabilization criteria for T–S fuzzy systems with affine matched membership functions. IEEE Trans. Fuzzy Syst. 2019, 27, 540–548. [Google Scholar] [CrossRef]
- Ku, C.-C.; Chang, W.-J.; Tsai, M.-H.; Lee, Y.-C. Observer-based proportional derivative fuzzy control for singular takagi-sugeno fuzzy systems. Inf. Sci. 2021, 570, 815–830. [Google Scholar] [CrossRef]
- Vijayakumar, M.; Sakthivel, R.; Almakhles, D.; Anthoni, S.M. Observer based tracking control for fuzzy control systems with time delay and external disturbances. Int. J. Control Autom. Syst. 2023, 21, 2760–2769. [Google Scholar] [CrossRef]
- Wang, H.; Xu, K.; Qiu, J. Event-triggered adaptive fuzzy fixed-time tracking control for a class of nonstrictfeedback nonlinear systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3058–3068. [Google Scholar] [CrossRef]
- Qi, Y.; Yuan, S.; Wang, X. Adaptive event-triggered control for networked switched T–S fuzzy systems subject to false data injection attacks. Int. J. Control Autom. Syst. 2020, 18, 2580–2588. [Google Scholar] [CrossRef]
- Chang, X.-H.; Yang, C.; Xiong, J. Quantized fuzzy output feedback H∞ control for nonlinear systems with adjustment of dynamic parameters. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 2005–2015. [Google Scholar] [CrossRef]
- Cheng, J.; Shan, Y.; Cao, J.; Park, J.H. Nonstationary control for T–S fuzzy markovian switching systems with variable quantization density. IEEE Trans. Fuzzy Syst. 2020, 29, 1375–1385. [Google Scholar] [CrossRef]
- Zheng, Q.; Xu, S.; Yan, H. Observer-based quantized guaranteed cost control of fuzzy networked control systems with unreliable links and its applications. IEEE Trans. Fuzzy Syst. 2024, 32, 5214–5225. [Google Scholar] [CrossRef]
- Han, X.; Ma, Y. Sampled-data robust H∞ control for T–S fuzzy time-delay systems with state quantization. Int. J. Control Autom. Syst. 2019, 17, 46–56. [Google Scholar] [CrossRef]
- Kaviarasan, B.; Kwon, O.-M.; Park, M.J.; Sakthivel, R. Input–output finite-time stabilization of T–S fuzzy systems through quantized control strategy. IEEE Trans. Fuzzy Syst. 2021, 30, 3589–3600. [Google Scholar] [CrossRef]
- Li, M.; Shi, P.; Liu, M.; Zhang, Y.; Wang, S. Event-triggered-based adaptive sliding mode control for T–S fuzzy systems with actuator failures and signal quantization. IEEE Trans. Fuzzy Syst. 2020, 29, 1363–1374. [Google Scholar] [CrossRef]
- Li, A.; Ahn, C.K.; Liu, M. T–S fuzzy-based event-triggering attitude-tracking control for elastic spacecraft with quantization. IEEE Trans. Aerosp. Electron. Syst. 2021, 58, 124–139. [Google Scholar] [CrossRef]
- Ye, Z.; Zhang, D.; Cheng, J.; Wu, Z.-G. Event-triggering and quantized sliding mode control of umv systems under dos attack. IEEE Trans. Veh. 2022, 71, 8199–8211. [Google Scholar] [CrossRef]
- Talebi, S.P.; Mandic, D.P. On the dynamics of multiagent nonlinear filtering and learning. In Proceedings of the IEEE 34th International Workshop on Machine Learning for Signal Processing, London, UK, 22–25 September 2024; pp. 1–6. [Google Scholar]
- Talebi, S.P.; Werner, S.; Mandic, D.P. Quaternion-valued distributed filtering and control. IEEE Trans. Autom. Control 2020, 65, 4246–4257. [Google Scholar] [CrossRef]
- Li, Z.-M.; Chang, X.-H.; Yu, L. Robust quantized H∞ filtering for discrete-time uncertain systems with packet dropouts. Appl. Math. Comput. 2016, 275, 361–371. [Google Scholar] [CrossRef]
- Zong, G.; Ren, H.; Karimi, H.R. Event-triggered communication and annular finite-time H∞ filtering for networked switched systems. IEEE Trans. Cybern. 2020, 51, 309–317. [Google Scholar] [CrossRef] [PubMed]
- Qu, H.; Zhao, J. Event-triggered H∞ filtering for discrete-time switched systems under denial-of-service. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 2604–2615. [Google Scholar] [CrossRef]
- Meng, X.; Chen, T. Event triggered robust filter design for discrete-time systems. IET Control Theory Appl. 2014, 8, 104–113. [Google Scholar] [CrossRef]
- Chen, G.; Chen, Y.; Zeng, H.-B. Event-triggered H∞ filter design for sampled-data systems with quantization. ISA Trans. 2020, 101, 170–176. [Google Scholar] [CrossRef]
- Liu, Y.; Fang, F.; Park, J.H. Decentralized dissipative filtering for delayed nonlinear interconnected systems based on T–S fuzzy model. IEEE Trans. Fuzzy Syst. 2018, 27, 790–801. [Google Scholar] [CrossRef]
- Qiu, J.; Ji, W.; Lam, H.-K.; Wang, M. Fuzzy-affinemodel-based sampled-data filtering design for stochastic nonlinear systems. IEEE Trans. Fuzzy Syst. 2020, 29, 3360–3373. [Google Scholar] [CrossRef]
- Zheng, Q.; Shi, W.; Wu, K.; Jiang, S. Robust H∞ and guaranteed cost filtering for T–S fuzzy systems with multipath quantizations. Int. J. Control Autom. Syst. 2023, 21, 671–683. [Google Scholar] [CrossRef]
- Chang, X.-H.; Liu, Y. Robust H∞ filtering for vehicle sideslip angle with quantization and data dropouts. IEEE Trans. Veh. Technol. 2020, 69, 10435–10445. [Google Scholar] [CrossRef]
- Zheng, Q.; Xu, S.; Zhang, Z. Nonfragile quantized H∞ filtering for discrete-time switched T–S fuzzy systems with local nonlinear models. IEEE Trans. Fuzzy Syst. 2020, 29, 1507–1517. [Google Scholar] [CrossRef]
- Chang, X.-H.; Li, Z.-M.; Park, J.H. Fuzzy generalized H2 filtering for nonlinear discrete-time systems with measurement quantization. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 2419–2430. [Google Scholar] [CrossRef]
- Zhao, X.-Y.; Chang, X.-H. H∞ filtering for nonlinear discrete-time singular systems in encrypted state. Neural Process. Lett. 2023, 55, 2843–2866. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, B.-Z.; Park, J.H.; Lee, S. Event-based reliable dissipative filtering for T–S fuzzy systems with asynchronous constraints. IEEE Trans. Fuzzy Syst. 2017, 26, 2089–2098. [Google Scholar] [CrossRef]
- Hu, C.; Ding, S. A novel dynamic event-triggered dissipative filtering for T–S fuzzy systems with asynchronous constraints. Int. J. Fuzzy Syst. 2024, 26, 2407–2418. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, B.; Zhang, Y.; Zhang, Z. Dissipative fuzzy filtering for nonlinear networked systems with limited communication links. IEEE Trans. Syst. Man Cybern. Syst. 2017, 50, 962–971. [Google Scholar] [CrossRef]
- Yang, Q.; Chang, X.-H. Dissipativity-based robust filter design for singular fuzzy systems with dynamic quantization and event-triggered mechanism. Commun. Nonlinear Sci. Numer. Simul. 2024, 137, 108071. [Google Scholar] [CrossRef]
- Li, Z.-M.; Xiong, J. Event-triggered fuzzy filtering for nonlinear networked systems with dynamic quantization and stochastic cyber attacks. ISA Trans. 2022, 121, 53–62. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Han, H. Event-triggered finite-time filtering for nonlinear networked system with quantization and dos attacks. IEEE Access 2024, 12, 1308–1320. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 20 | 30 | 50 | 70 | 90 | |
|---|---|---|---|---|---|
| Theorem 2 | 0.8525 | 0.8516 | 0.8509 | 0.8506 | 0.8504 |
| [44] | 0.9114 | 0.9104 | 0.9095 | 0.9092 | 0.9090 |
| 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | |
|---|---|---|---|---|---|
| Theorem 2 | 0.8509 | 0.8520 | 0.8531 | 0.8542 | 0.8553 |
| [44] | 0.9095 | 0.9108 | 0.9121 | 0.9134 | 0.9146 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, C.; Li, Z.; Jing, S. Event-Based Quantized Dissipative Filtering for Nonlinear Networked Systems. Mathematics 2025, 13, 1248. https://doi.org/10.3390/math13081248
Lu C, Li Z, Jing S. Event-Based Quantized Dissipative Filtering for Nonlinear Networked Systems. Mathematics. 2025; 13(8):1248. https://doi.org/10.3390/math13081248
Chicago/Turabian StyleLu, Chengming, Zhimin Li, and Shuxia Jing. 2025. "Event-Based Quantized Dissipative Filtering for Nonlinear Networked Systems" Mathematics 13, no. 8: 1248. https://doi.org/10.3390/math13081248
APA StyleLu, C., Li, Z., & Jing, S. (2025). Event-Based Quantized Dissipative Filtering for Nonlinear Networked Systems. Mathematics, 13(8), 1248. https://doi.org/10.3390/math13081248