1. Introduction
Back in 1928, the French physicist and engineer Alfred-Marie Liénard, who was dealing with the problems of elasticity, magnetism, and mechanics, introduced the following second-order differential equation [
1]:
where
and
are linear or nonlinear functions dependent on
x. Since that time, the equation has been extended, adopted, and modified with the aim to describe phenomena in mechanics, engineering, economics, biological sciences, physics, and other scientific fields. Thus, in 1942, Equation (1) was extended as follows [
2]:
where
is not only the function of
but also of
. This model corresponds to the relaxation oscillator. The elastic term
is assumed to be a linear, quadratic, or cubic function of
. At the other side, the Liénard equation is modified by introducing relativistic acceleration [
3,
4], as follows:
where
. However, the most often applied Liénard equation has the form
where
,
, and
are polynomial functions, and
c and
b are constants. The model (2) is characterized by multiple constitutive relations rather than a single one, leading to its extensive utilization in various fields of engineering and science. Let us mention some of them.
The fast development of nanotechnology and material science has led to skyrocketing interest in micro-electromechanical systems (MEMS). In [
5,
6] the oscillation of the MEMS is investigated by analyzing the solution of Equation (2). Equation (2) gives the free vibration of the magneto-electro-mechanical oscillator with a magnet–coil system [
7,
8] where the interaction between a pair of neodymium permanent magnets is replaced with a nonlinear instead of linear stiffness relation. The model gives the explanation about the frequency and amplitude properties of the system. The same model of magnetic interaction is applied in free vibrations of the horizontal mathematical pendulum in a repulsive field controlled by two coil magnets [
9]. Using the appropriate parameter values, the analytic model gives good simulation of the experimentally obtained results. Equation (2) is utilized for the effect of spontaneous emission and gain saturation in directly modulated semiconductor lasers [
10], too. The model is suitable for qualitative analysis of the problem. Equation (2), with certain parameter values, is applied in treating heat conduction, too. Namely, the mathematical model of one-directional heat conduction, given with the Maxwell–Cattaneo equation (which is a special case of the telegraph equation), is transformed into the averaged time Equation (2) [
11]. The solution of the equation gives the heat distribution in time. The nonlinear model is strong and gives better results than the linear one.
Due to analogies in science, Equation (2) is applied in treating phenomena in biology, human sciences, etc. Let us mention some of them. The bacteria growing in a chemostat depending on the nutrient levels is modeled with Equation (2) (see [
12]). The solution of the equation gives the influence of the variation of the chemostat concentration on the bacteria density. The spread of a disease within a given population [
13] is a seemingly necessary condition of human existence, leading to the presence of epidemics. In the papers [
14,
15,
16], the epidemiological model based on the Michaelis–Menten contact rate is given in the form (2). By analyzing the model, the effect of two subpopulations—susceptibles (those who can catch or acquire the disease but presently do not have it) and infectives (those who have the disease and can transmit it to the susceptibles)—is obtained.
Based on the aforementioned research, it can be concluded that the common property of processes and motions is their periodicity. Hence, the Liénard equation has to satisfy the conditions for existence of the unique periodic solution (see [
17,
18]). In addition, it is concluded that up to nowadays, a significant number of approximate procedures have been developed for solving the nonlinear Liénard equation (see, for example, [
19]). Most of them are based on the exact solution of the linearized equation. Unfortunately, the obtained results are not accurate enough, and the so-obtained analytic solutions differ significantly in comparison to the exact numeric ones. The discrepancy is due to the fact that in solving the procedure, the strong nonlinear terms are transformed into weak nonlinear or simple linear ones. However, the Liénard equation is strong and nonlinear and in general contains the nonlinear deflection and damping term.
In this paper, the following special type of Liénard equation is considered:
where the deflection function
is of power type,
is the function dependent on quadratic damping, and
is a constant value. By investigating the Liénard oscillator (5) with nonlinear deflection and quadratic damping, deeper insights into the interplay between nonlinearity, dissipation, and complex dynamics can be recovered. The equation is an appropriate model for the damped mass-variable oscillatory system with one degree of freedom and excited with a constant force. Unlike the previously mentioned methods, in this paper, a procedure for solving Equation (5) based on the exact solution of a strictly nonlinear differential equation is developed. However, obtaining closed-form solutions for the nonlinear Equation (5) is often challenging. In this paper, the exact solution is obtained by modifying the harmonic balance method and utilizing the cosine Ateb function [
20]. Based on that closed-form solution, the analytic solution of Equation (5) is determined by adopting the approximate averaging solving method published in [
21,
22]. The obtained analytic result is tested on an example, the approximate solution is compared with a numeric one, and the difference is determined. In this paper, the first integral for the Liénard equation is composed. The integral is analyzed for various values of system parameters and excitation constant. By integrating the first integral, the period of vibration of the oscillator is computed. Finally, the results of this study on the Liénard equation are applied for optimizing the excitation parameter of the sieve, which is modeled as a mass-variable oscillator.
This paper has six sections. In
Section 2, the procedure for solving the Liénard equation is presented in general. In
Section 3, the exact analytic solution for the equation with certain parameters is obtained. In this study, it is shown that despite strong nonlinearity and quadratic damping, such an oscillator may have simple harmonic motion. The approximate solution based on the exact one is determined for the perturbed equation. In
Section 4, the first integral of the Liénard equation is introduced. Using the first integral, the influence of initial conditions and variation of the excitation is analyzed. By integrating, a formula for period of vibration is obtained. In
Section 5, as a numerical example, the vibration of a sieve with variable mass for some values of excitation is considered. The paper ends with the Conclusions Section.
2. Exact and Approximate Solution of the Generalized Liénard Equation
To obtain the exact solution of the generalized Liénard equation of the type (5), the following procedure is developed:
- -
For Equation (5), the trial solution is assumed in the form of a periodic function x(t) = x(t + T) with period T.
- -
Substituting the trial solution into (5) and using the harmonic balance method by equating the terms with the same order of the assumed function, a system of algebraic equations is obtained.
- -
By solving algebraic equations, the coefficients in Equation (5) and the parameters of the solution are obtained. The so-obtained solution is the closed form one for the equation
where
and
are the functions with corresponding coefficients.
Comparing (5) and (6), it is evident that there is a difference. Let us assume that the difference is small, and (5) is the perturbed version of (6). Then, the solution of (5) has to be also the perturbed version of the closed-form solution of (6).
Hence, Equation (5) is transformed into
Introducing the solution for (7) in the form of the solution for (6), but with time-variable amplitude and phase, Equation (7) is transformed into two first-order differential equations in the two new variables: amplitude and phase.
To find the exact solution for the aforementioned system is a hard task. For simplicity, the averaging procedure over the period of the periodic functions is performed, and the averaged equations follow.
The solutions of these equations give the averaged solution of (5).
Remark 1. The difference between Equations (5) and (6) may be in the parameter values but also in terms, i.e., in the structure of the equation.
4. First Integral in Liénard Equation
Equation (8) has the first integral
i.e.,
where
is the arbitrary constant, which depends on the initial conditions. For general initial conditions (9), the constant
is
Substituting (34) into (33), it is
i.e.,
Equation (36) gives the relation for various initial conditions and , parameter , constant , and order of nonlinearity . After integration of (36) for the initial conditions x(0) = x0, the x(t) follows. Unfortunately, to find the analytic solution for Equation (36) is usually impossible. Because of that, based on the values computed for certain values of x and , some characteristic properties of the relation are determined. Let us mention some of them.
- 1.
For
, the limit values of
x are obtained. Namely, equating the left side of (36) with zero, the algebraic equation is as follows:
The solutions and represent the two boundary values, which represent the vibration region. The oscillation occurs around )/2 with an amplitude of )/2.
- 2.
The extreme value of (36) is obtained for , which is the solution for the algebraic equation
The corresponding extreme values are
For the special case when
, the first integral has the form
For this equation, when
= 0, the extreme values are
and for
, the values of
are obtained by solving the algebraic equation
Finally, the maximal value depends on the square root of the constant excitation.
4.1. Period of Vibration
For the exact differential Equation (13) with initial conditions
and parameters
and
, the first integral (33) and the constant of integration
K (34) are
Separating the variables and integrating, we obtain
Substituting the new variable
, the transferred version of (46) is
Introducing the Euler beta function
[
25] into (47), the period of vibration is as follows:
Remark 5. The expression (48) corresponds to T = 2Π /ω, where 2Π = is the period of the Ateb function, and ω (12) is the frequency of the function (14).
Using (48), the frequency of vibration is obtained as follows:
It is obvious that in general, the frequency is the function of the amplitude of vibration and order of nonlinearity, except for .
4.2. Influence of the Initial Conditions
For the general Equation (8) with initial conditions (44), the constant
K (34) and the first integral (36) transform into
and
Now, the question is: are there other initial conditions that give expressions equal to (50) and (51)? To answer the question, the expression (51) is analyzed. Substituting
into (51), the value of
is computed. Thus, it is concluded that first integral (51) and the constant (50) are also satisfied for initial conditions
The same conclusion is obtained for expressions (45) for the initial conditions
The first integral (45) corresponds to the exact Liénard equation (13), whose closed-form solution is obtained in the general form (14), where A and θ are arbitrary constants that have to satisfy the initial conditions.
Substituting the initial conditions (44) into (14) and its time derivative, it follows that
A = const. and
θ = 0, and the corresponding solution is
At the other side, for initial conditions (53), the values of
A and
θ are the solutions of two equations
The relations (55) are satisfied for
A = const. and
θ =
, where
(48) is the period of the Ateb function. Then, the solution (14) for initial conditions (53) is
5. Oscillator with Mass-Variable Parameter
In the process industry, separation plants for classifying particles by size are frequently used (see, for example, [
26,
27]). These are usually sieves (screens, membranes) that perform a periodic translational motion. During oscillatory motion, the mass on the sieve changes; it increases due to the addition of material and decreases as material is discharged or passes through the openings. Then, the dimensionless mass variation is
, where
is the displacement. Assuming that the system has nonlinear elastic properties and that a damping force is acting, the differential equation of motion corresponds to Equation (8). In this section, the system is modeled as the oscillator (13). Two types of nonlinearity in the oscillator are considered:
and
. The corresponding differential Equations (13) and first integrals (45) are as follows:
For the initial conditions
,
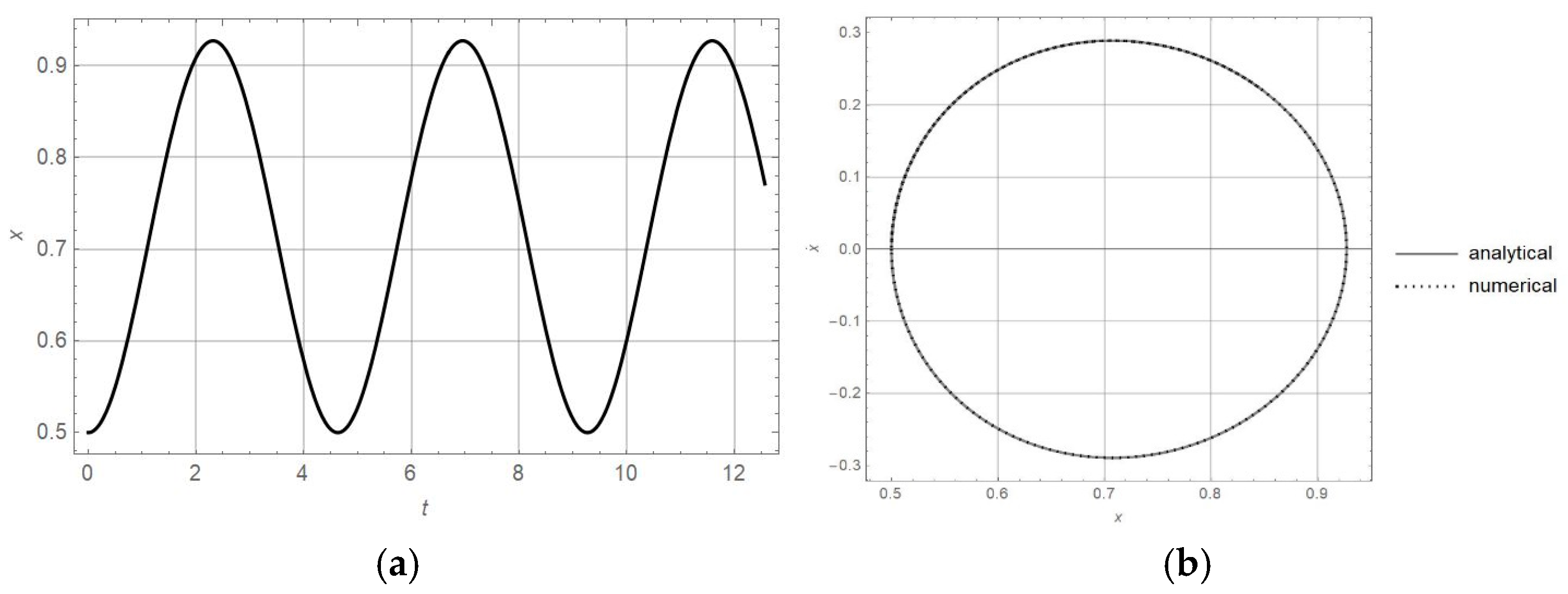
, the second-order differential Equations (57) and (58) are solved, and the obtained results are compared with the closed-form analytic solutions
, and
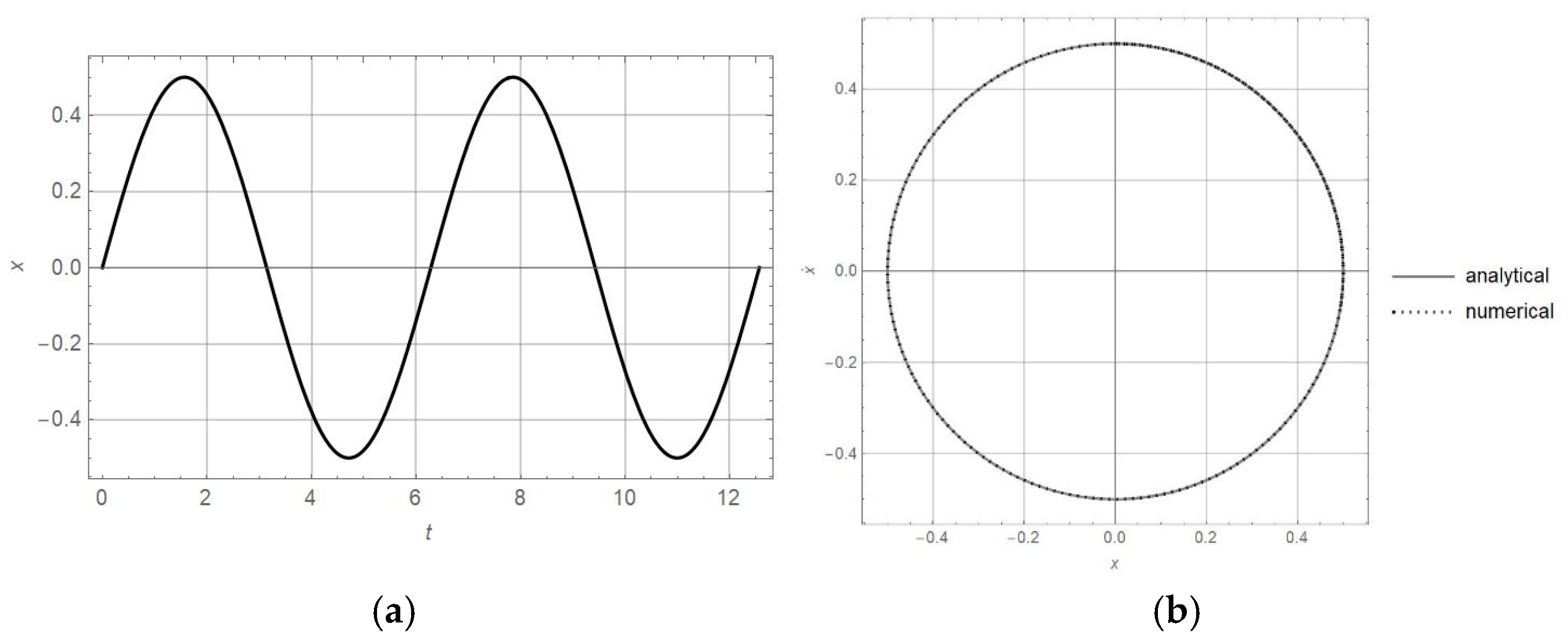
. In
Figure 1a,b, the
x-t diagrams obtained numerically and analytically are plotted. The numerical solutions are obtained by applying the Wolfram Mathematica 11. Comparing the
x-t curves, it is obtained that the amplitudes of vibration for both oscillators are equal and that their periods of vibration differ; the period is shorter for
than for
. The exact values of periods of vibration computed analytically according to (48) are
where
is the special gamma function [
25]. It is obvious that the analytic results are equal to the numerically obtained ones.
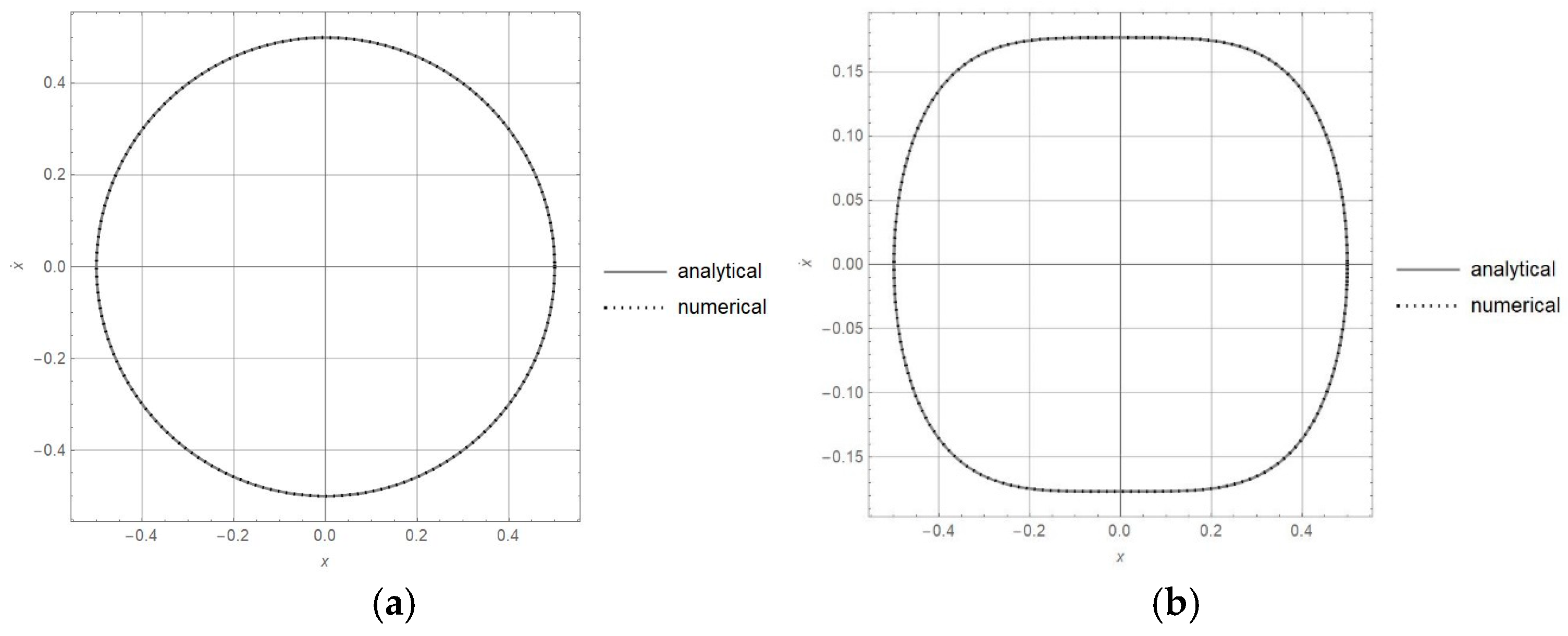
In
Figure 2a,b, the
plots for Equations (57) and (58) are plotted. The numerically obtained curves are compared with the analytically obtained orbits
and 2
, respectively. It is evident that the analytically developed result is equal to the numerically obtained one. For
, the orbit is a circle with a radius of 0.5.
Let us consider the oscillator given with Equation (57) and the corresponding first integral for initial conditions
x(0) = 0 and
. In
Figure 3a, the
x-t diagram is plotted, and in
Figure 3b, the
diagram is plotted.
Comparing
Figure 1a and
Figure 3a, it is obvious that both solutions have the amplitude
A = 0.5, and the oscillation is around the position
5.1. Asymptotic Solution
Let us consider the case when the parameter of nonlinearity is perturbed in comparison to that in Equations (57) and (58)
For the initial conditions
x(0) = 0.5,
,
= 0.5., and according to (30), the approximate analytic solutions of (61) and (62) are
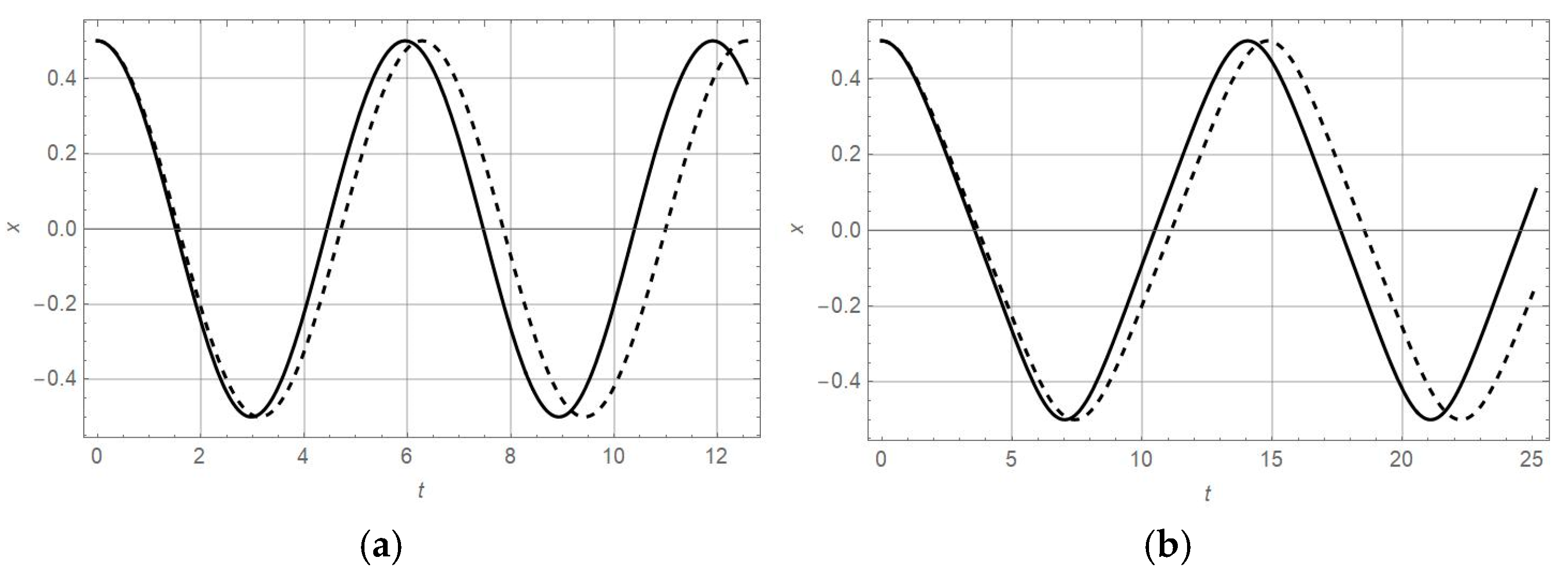
In
Figure 4a, the solutions of (57) and (61) for
are plotted, and in
Figure 4b, the solutions of (58) and (62) for
are plotted. Comparing the approximate solution with the numeric one, it is evident that the difference is negligible. In addition, comparing the diagrams in
Figure 4a and in
Figure 4b, respectively, it is obtained that the amplitude of vibration for oscillators is 0.5, while the frequency of vibration of these oscillators differs. Namely, the periods of vibration for oscillators (57) and (58) are (59) and (60), respectively, while for (61) and (62), according to (31), they are
Comparing the values, it is evident that the periods (64) of the perturbed Equations (61) and (62) are shorter than the periods of Equations (57) and (58).
5.2. Influence of the Excitation Force
During the operation of the sieve, there is the possibility of change of intensity of the excitation
. The influence of the force
on the vibration is tested. The equation of motion for the oscillator with
α = 1 and
is
For the initial conditions
,
, the corresponding first integral is
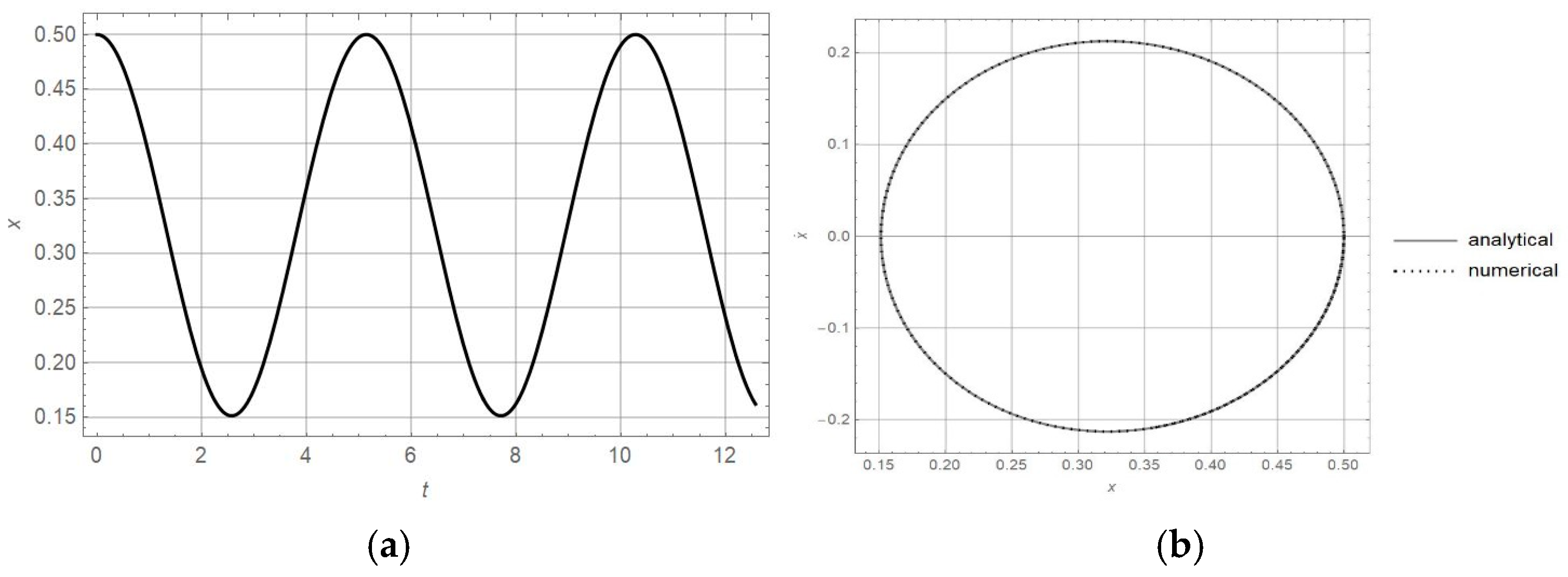
Unfortunately, there is no exact analytic solution for (65). For
= 0.5, the
x-t diagram, obtained by numeric solving of (66), is plotted (
Figure 5a). In addition, in
Figure 5b, the orbital motion in the
plane is presented. Using the relation (66) and the condition
, it is computed that
and
(see
Figure 5b). Thus, the oscillation is around
with amplitude
. The analytically calculated values agree with the numerically calculated ones (see
Figure 5).
The procedure is repeated for the constant excitation
= 1.5. In
Figure 6a, the
x-t diagram is plotted, and in
Figure 6b, the
diagram is plotted. Using (66) and the condition
, the following values are obtained:
and
. The oscillation is around
with amplitude
.
Analyzing (66), it is obvious that for , the numeric values are and . The oscillation is around with amplitude . According to (66), the limit value excitation is computed. Thus, for , the amplitude of vibration decreases to zero, and the motion is around the value .
5.3. Mass Variation
According to the aforementioned results, the mass variation is analyzed. Using the solutions of Equations (58) and (59) for
, the mass variation is as follows:
For both sieves, the mass variation is in the interval from to . However, the period of mass variation is longer for than for .
In
Table 2, the mass variation as the function of the excitation
in the oscillator with
is shown.
The interval of mass variation decreases with the increase of up to the value . By further increase of , the mass interval increases.
Generalizing the obtained results, it is concluded that for a constant excitation force of the sieve, the interval of mass variation is constant—with the same minimal mass and maximal mass boundary values. However, the time period of mass variation differs; it depends on nonlinear properties of the sieve. The higher the order of nonlinearity of the sieve, the longer the mass variation period. This result is important in designing the new sieve; namely, depending on the requirement of the time period necessary for mass variation in the process, the appropriate nonlinear sieve properties are chosen.
On the other hand, it is shown that in the existing sieve, the variation of the excitation force causes a change in the oscillatory motion and in the mass variation function. Namely, the excitation force is the control parameter for mass variation. Changing the excitation, we may obtain the appropriate mass variation prescribed to give the high efficiency of the system. This result is suitable for practical application.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}