1. Introduction
Decision-making for autonomous vehicles (AVs) presents significant challenges in environments with complex traffic participants, dynamic flow conditions, and high interaction levels, as observed in scenarios such as unprotected left turns and uncontrolled intersections. Roundabouts are distinctive intersections with a central island that directs traffic in one direction. This design improves traffic flow and safety by reducing conflict points and controlling vehicle speeds [
1,
2]. Compared with traditional intersections, roundabouts are preferred because of their greater traffic management efficiency and enhanced safety outcomes [
3].
However, navigating roundabouts presents significant challenges for both AVs and human drivers [
4]. A key challenge is predicting and understanding the behaviors and intentions of other drivers, which complicates decision-making [
5]. Another challenge is ensuring safe and efficient merging into and out of the roundabout, requiring precise judgments of the right moments for entry and exit [
6]. These challenges have increased the need for robust decision-making frameworks for AVs.
Scholarly studies on decision-making in roundabouts have explored various methodologies, including rule-based strategies, game theory, and reinforcement learning (RL) paradigms.
Finite state machines (FSM) have been used for defining decision-making rules based on contextual variables [
7,
8]. While effective in simpler scenarios [
9], FSMs struggle with the complexities and uncertainties in dynamic environments like roundabouts [
10].
Game theory has been applied to model interactions between vehicles in roundabouts [
11]. Tian et al. [
12] and Chandra et al. [
13] combined different driving styles with game-theoretical models to improve decision-making accuracy. Decentralized game-theoretic planning reduces the computational complexity by limiting interactions with the local area within the agents’ observational range [
14]. While game-theoretic analysis of AVs and human-driven vehicles can enhance decision-making in complex settings, it faces limitations in handling multi-agent dynamics and the uncertainty of real-time decision-making in complex environments [
15].
Reinforcement learning (RL) offers distinct advantages over traditional methods such as finite state machines (FSM) and game theory by providing enhanced robustness to dynamic environments. Unlike FSM and game theory, which often struggle to handle uncertainties and complex, real-time, multi-objective trade-offs, RL can dynamically adapt to changing conditions, making it more robust in uncertain environments [
16]. The Markov decision process (MDP), a key framework in RL, enables the modeling of these challenges, allowing for more flexible and robust decision-making.
This is particularly evident in roundabout merging scenarios where the Markov decision process (MDP) framework enables the following: (1) real-time policy optimization under partial observability, (2) graceful degradation when confronted with unmodeled disturbances (e.g., aggressive driver behaviors), and (3) automatic compensation for measurement errors through reward-shaping techniques. Such characteristics allow RL-based agents to maintain stable performance where traditional model-based approaches would require explicit uncertainty quantification [
17].
Table 1 presents the decision content of roundabout autonomous driving based on MDP, focusing on the key components such as state space, action space, and reward function. In general, the traditional MDP modeling method has obvious shortcomings in roundabout merging speed planning. First, the traditional state space usually contains a large number of redundant parameters, such as position, velocity, acceleration, etc., which are often not necessary in traffic circle merging scenarios. Vehicle merging behavior depends more on the relative position and speed of the vehicle and the geometry of the traffic circle, and the redundant state parameters increase the computational complexity and affect the decision-making efficiency and real-time performance. Secondly, the traditional discrete action space cannot accurately simulate the continuous and dynamic change behavior of vehicles in the merging process. The decision-making behavior of human drivers is usually flexible, adjusting speed and acceleration according to the geometric characteristics of the traffic circle, and the discretized, fixed-value action space has difficulty reflecting this process. Finally, traditional reward functions with discrete values, such as collision penalties or target speed rewards, are unable to accurately represent the complexity and continuity of driving behavior and lack a unified evaluation framework for different decision dimensions.
Next, we will further analyze these papers from three aspects: state space, action space, and reward function.
Defining the state space is crucial for representing environmental contexts, as it directly influences the effectiveness of algorithmic learning and the quality of decision-making outcomes. Gritschneder et al. [
10] defined the state space using the relative data between vehicles, including their positions, velocities, and heading orientations. This approach highlights the dynamic interaction between the ego vehicle and other traffic entities, thereby enabling a more adaptive strategy that can respond to varying traffic conditions. In contrast, most existing studies focus primarily on the ego vehicle’s state attributes in the state space, such as position, velocity, acceleration, and heading angle [
18,
19,
20]. However, these studies do not address the specific formulation of the state space for roundabout scenarios, particularly the relationship between vehicle states and roundabout geometry. A simplified state space can improve the computational efficiency of the algorithm.
In the action space, speed planning is typically modeled using discrete constant acceleration and deceleration parameters. Trajectory planning also incorporates discrete steering angle data [
18,
19,
20]. Although action space designs based on fixed velocities and steering angles work well for simple driving tasks, they lack flexibility in complex, dynamic driving environments, limiting the agent’s adaptability and control precision. Moreover, this approach overlooks the continuous control aspects inherent in human driving behavior. Notably, Gritschneder et al. [
10] recognized the variability in the speed of human drivers as they approached roundabouts. Their action space design replicates human-like behaviors such as “Go”, “Stop”, and “Approach” by clustering speed trajectories from real-world driving data.
The design of reward functions has been one of the most important aspects of reinforcement learning [
21], and the reward functions reviewed in these studies exhibit significant variability. Gritschneder et al. [
10] and Chandiramani et al. [
18] used fixed rewards and penalties linked to specific task objectives. Although this approach is simple and easy to implement, using fixed rewards in complex tasks, such as autonomous driving, often fails to capture the dynamic effects of the agent’s actions on the environment. In addition, it lacks adaptability to multiple objectives, long-term goals, and changing environmental conditions. These limitations can lead to suboptimal learning, impractical strategies, and inconsistent performances.
To address these issues, Bey et al. [
19] and Li et al. [
20] developed dynamic reward functions that adjust the rewards and penalties, emphasizing safety, efficiency, and comfort in autonomous driving. These functions penalize sudden braking and collisions while rewarding smooth driving and adhering to the target speeds. However, using weighted summation to standardize the evaluation metrics across different dimensions fails to accurately reflect the physical interactions between vehicles and between vehicles and the environment. This framework lacks dynamic adaptability, struggles to resolve conflicts between multiple objectives, and overlooks dynamic constraints, all of which can lead to poor performance in complex environments.
Among them, by combining the reward function with other theories in an interdisciplinary way, it not only helps to better understand the nature of the reward mechanism and increase the interpretability of the reward function. It can also provide a richer explanatory framework from different perspectives, making the decision-making process of the system more transparent and predictable [
22]. In addition, by combining multiple theories, the reward function can show higher flexibility and adaptability in more complex situations, thereby optimizing decision-making performance and ensuring the robustness and effectiveness of the system in practical applications. Further, this continuous reward space can effectively alleviate problems similar to sparse rewards [
23], and in environments where frequent strategy adjustments are required, it can provide smooth and frequent feedback and promote stable learning of intelligent agents. Among them, the mechanics-based method can intuitively simulate the physical and mechanical interactions of the real world, enabling it to more accurately characterize and handle dynamic and complex environments [
24].
The social force model is a widely used mechanics-based framework for simulating interactions and negotiation behaviors between individuals. Helbing et al. [
25] first introduced the concept of “social force” to quantify the intrinsic motivation that drives individuals to take specific actions. They showed that the social force model can effectively explain various collective phenomena in pedestrian behavior, showing self-organizing characteristics. Over time, the social force model has been increasingly applied to simulate interactions between pedestrians and non-motorized vehicles [
24], pedestrians and motorized vehicles [
26], and between motorized vehicles [
27]. Delpiano et al. [
27] introduced a simple two-dimensional microscopic car-following model based on a social force framework to address traffic flow challenges. This model incorporates continuous lateral distance, offering a more intuitive and natural mathematical representation than traditional car-following models.
Further, inspired by the social force model, Li et al. [
28] and Li et al. [
29] proposed a car-following model and a lane-changing model to describe the microscopic traffic system based on the physical model in the constitutive relationship. Li et al. [
28] proposed a new microscopic traffic model based on a mass-spring-damper clutch system to describe the interaction of vehicles in undisturbed traffic flow. The model can naturally reflect the response of the ego vehicle to the relative speed and expected distance of the preceding vehicle, as well as take into account the influence of the ego vehicle on the preceding vehicle, which is ignored by the existing car-following model. Compared with the existing car-following model, the model provides a physical explanation of the car-following dynamics, and through the nonlinear wave propagation analysis technology, the model has good scalability and can chain multiple systems to study macroscopic traffic flow. Li et al. [
29] compared acceleration dynamics to material behavior principles. They combined viscous and elastic components into various models to represent the three types of forces acting on a vehicle and developed a force-based two-dimensional lane-changing dynamics model. The comparison results show that the lane-changing dynamics model can effectively capture the complex lane-changing behavior and its interaction with surrounding vehicles in a simple and unified way.
Therefore, in this paper, we introduce an MDP-based decision-making method for automated driving at ring intersections, focusing on safe merging scenarios. First, we optimize the state space for merging at a roundabout intersection and simplify the design of the state space to improve efficiency and real-time decision-making by considering the relative positional relationship between vehicles and the geometric structure of the roundabout intersection. Then, based on previous studies on typical merging driving behaviors of human drivers, as well as natural driving datasets, we design an action space with humanoid merging characteristics, which in turn can mimic human driving behaviors when merging at a roundabout intersection. Finally, in terms of the reward function, we use viscous and elastic models based on mechanical principles to represent the relative motion relationships between vehicles and traffic circle structures, as well as between vehicles and vehicles, so as to simulate the effects of other factors, such as vehicles, roundabout intersections, and traffic rules, on vehicle merging behaviors positively or negatively.
Last but not least, in order to enhance the interpretability of the reward function while providing more adaptive and physically consistent feedback, this paper introduces a constitutive relationship model based on mechanics, specifically a combination of elastic and viscous components (i.e., a force-based reward function). This model can more accurately simulate vehicle interactions, rather than relying solely on discrete reward values and simple distance or speed parameters. Unlike traditional reward mechanisms that rely on static feedback such as collisions, this method can dynamically adapt to real-time driving interactions based on vehicle behavior and surrounding traffic conditions, achieving more human-like decision-making, thereby more adaptively and accurately reflecting real-world driving behavior and improving learning efficiency in dynamic environments.
The main contributions of this paper are as follows:
The state space focuses on the distance between the ego vehicle and the yield line, along with the vehicle’s speed, to streamline the policy training for greater efficiency.
The factors affecting vehicle merging were represented using viscoelastic constitutive relations. A new reward model was introduced within the MDP framework to balance safety, efficiency, and comfort, providing a more adaptive and comprehensive approach to autonomous decision-making at roundabouts.
The remainder of this paper is structured as follows:
Section 2 introduces the MDP model, defines the state space applicable to the actual roundabout scenario, the action space with human-like driving characteristics, and the reward space for modeling interactive behaviors using constitutive relations.
Section 3 evaluates the rationality and effectiveness of the state, action, and reward mechanism designs through a case study.
Section 4 summarizes the study and proposes prospects.
2. Algorithm Construction
2.1. Markov Decision Processes Theory
The decision-making problem in AVs can be viewed as a sequential decision problem that is typically solved using an MDP framework. Formally, an MDP is described by a 5-tuple 〈S, A, P, R,
〉 along with the policy
. In this context,
S represents a finite set of possible environmental states
s of the environment.
A denotes the action space, which is a finite set of actions
a that the agent can perform.
P is the state transition probability matrix:
R represents the reward function, which specifies the reward gained in a specific state for taking a certain action
:
is the discount factor, which is restricted to
to ensure convergence.
is the rule or function for how the agent chooses actions in each state, which is usually considered the action distribution in a given state
:
In an MDP, the system state transitions based on the current action, and the agent learns the optimal strategy by taking action to maximize the cumulative rewards
:
The two relevant quantities that describe the performance of the agent are the state-value function
:
and the state–action value function
:
Therefore, an agent can choose to find the optimal policy by maximizing the optimal state–action value function
:
When the policy reaches the optimal state, the value of the state is equal to the maximum action value in the current state:
. The relationship between them can be described using the Bellman optimal equation, as shown in Equation (
8).
Within the agent, the policy is implemented using a linear or nonlinear function approximator with adjustable parameters and a specific model. This study employed the Q-learning algorithm, which is a widely used method for solving MDPs. Q-learning is a model-free, online, off-policy, value-based algorithm that estimates cumulative long-term rewards using a critique. If the optimal policy is followed, the action with the highest expected cumulative value is selected.
2.2. State Space
Different from the traditional way of defining vehicle state space, the research scenario of this paper is not just a low-level speed planning model, but a more advanced confluence behavior decision model. Therefore, high-level behavior decisions often do not require the same sophisticated state-space design as low-level decision behaviors. This paper uses the distance of the vehicle relative to the yield line and the speed of the vehicle as state-space parameters, and defines the yield line position as the reference point (zero distance). The specific reasons include the following:
First, from the perspective of humanoid driving decisions, whether a vehicle is located on the left or right side of the merging lane, the driver evaluates his/her entry into the roundabout based on the relative distance to the yielding lane and the position relative to the other vehicles, which is consistent with the way human drivers make merging decisions. Thus, relative distance becomes a central factor influencing merging behavior and is sufficient to model vehicle merging decisions without the need for precise position (x, y) or heading angle.
Second, in terms of traffic rules for traffic-circle merging, the merging decision at a roundabout intersection depends primarily on the relationship between the vehicle and the intersection, not just the absolute position of the vehicle. The yield line defines rules such as “Yield right of way”, so the relative distance between vehicles and the yield line is critical in determining when and how vehicles merge.
Then, in terms of application scenarios, the decision model proposed in this paper focuses only on speed planning with predefined merging paths. Therefore, there is a natural relationship between the more precise absolute state variables (x, y, heading) and the relative distance variables between the autoroute and the yield line [
10,
30].
Finally, from the perspective of algorithm performance, in this paper, the spatial complexity is reduced from a high-dimensional (x, y, heading) space to a more relevant relative metric by introducing the concept of “relative distance to the yield line”. This reduction not only simplifies the state space, reduces the hardware requirements for model training, and improves the computational efficiency, but also enhances the generalization of the model to different roundabout intersections.
Therefore, the simplified state space of the roundabout merge is defined in
. The state-space vector is defined as follows:
where
D is a series of ego vehicle distances relative to the yield line of the roundabout, which is accumulated by projecting the actual position coordinates of the vehicle onto the centerline of the lane.
V is a series of ego vehicle speeds.
Before using a linear function approximator to estimate the value or policy function by linearly combining state features, the state space must be discretized. In this paper, the starting and ending positions of the roundabout are selected as 35 m before and 5 m after the yield line, with an interval of 0.2 m. The speed range is set from 0 m/s to 10 m/s, with an interval of 0.2 m/s. A two-dimensional grid is used to discretize the expected values of the state-space elements, as shown below:
D = {−35 m, −34.8 m, −34.6 m, …, 4.8 m, 5 m}
V = {0 m/s, 0.2 m/s, 0.4 m/s, …, 10 m/s}
Finally, to facilitate predicting the state information of other vehicles at the next moment, it is assumed that they are traveling at a constant speed.
2.3. Action Space
Most scholars studying the driving behavior of merging cars in roundabouts [
5,
31,
32], usually broadly categorize the merging driving behavior based on typical driving styles (conservative, conventional, and aggressive) into the following categories. The following categories include “
”, “
” and “
”.
: The vehicle stops at the yield line and then accelerates to enter the roundabout. The “” behavior occurs when the vehicle stops at the yield line and waits for a gap in traffic before proceeding. This behavior is a direct result of the vehicle assessing the presence of other vehicles entering the roundabout, and it aims to prevent collisions while waiting for the appropriate time to merge into the flow of traffic. The waiting period can be influenced by factors such as the speed and proximity of approaching vehicles, as well as the rules of priority at the roundabout.
: The vehicle slows appropriately near the yield line before entering the roundabout; The “” behavior refers to the vehicle moving forward to enter and pass through the roundabout once a sufficient gap is identified. This behavior is based on the vehicle’s analysis of the available space in the traffic flow, as well as its ability to merge safely without disrupting the roundabout’s traffic dynamics. In some cases, this behavior might involve accelerating to match the flow of traffic or maintaining a steady pace to merge without causing abrupt disruptions.
: The “” driving behavior can be seen as a more aggressive approach compared to “”, where the focus shifts from merely ensuring a safe merge to further prioritizing traffic flow efficiency.
These classifications are not arbitrary, but are specific behavioral strategies extracted from real-world driving scenarios, especially in complex traffic situations such as roundabout intersections. In order to replicate human-like driving behavior, the driving characteristics of a human driver entering a roundabout intersection can be combined with an automated driving strategy. Therefore, in this paper, these human-like driving characteristics are defined as the vehicle maintaining the desired target speed during the merging phase.
Therefore, this paper defines these human drivers’ driving behavior characteristics as the target speeds that the AV needs to maintain at different stages during the merging process. With reference to these three human drivers’ merging driving behaviors, this paper defines three human-like roundabout merging actions corresponding to the three target vectors of the speed planning module. They are named with the symbolic description of the action space
A as follows:
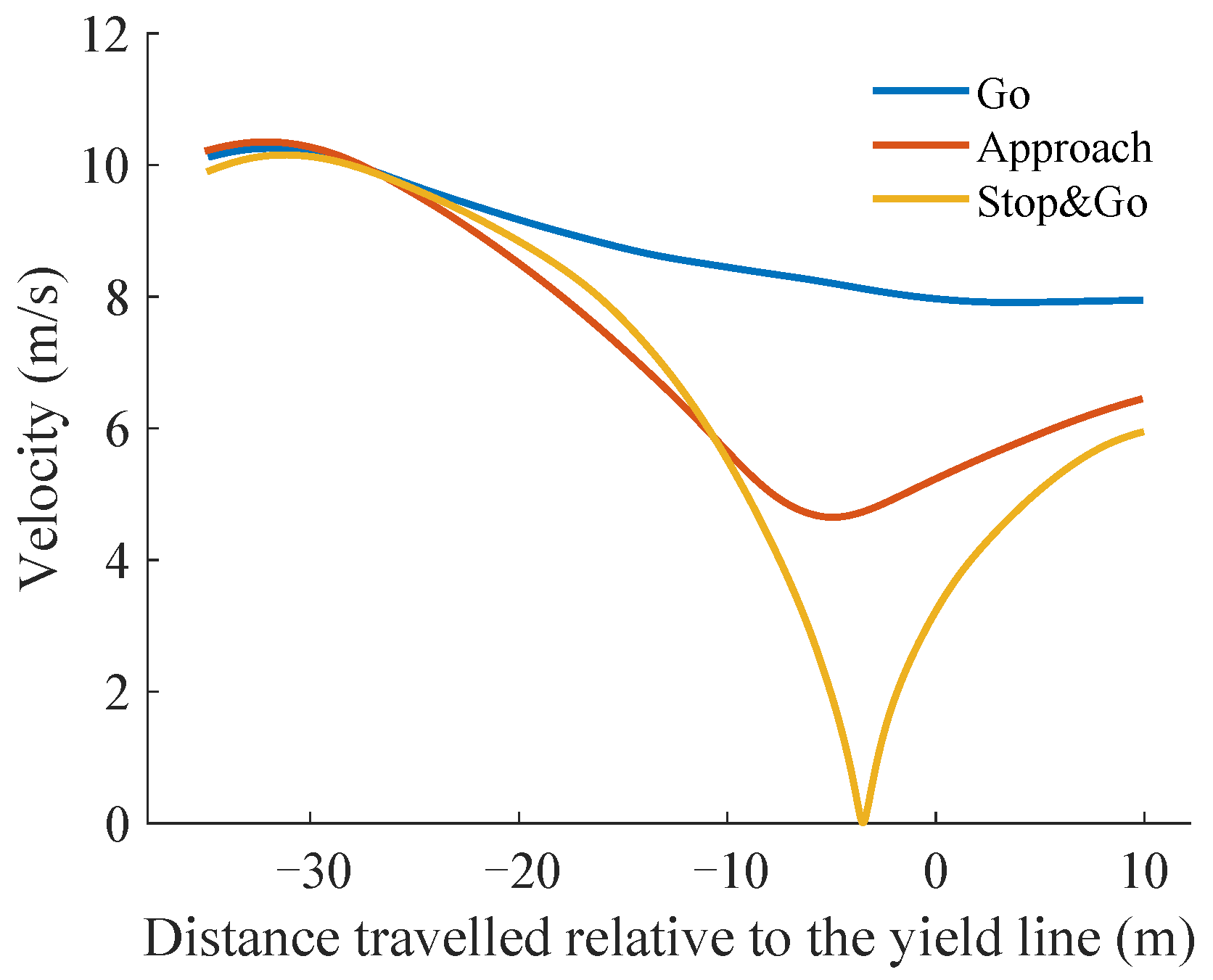
Figure 1 illustrates three different speed profiles motivated by three human driving behaviors. In this paper, the speed profiles of the three merging behaviors in the action space are extracted from the rounD natural driving dataset, which provides realistic human driving data for the roundabout intersection scenario. More details about the dataset are given in
Section 3.
As illustrated in
Figure 1, three distinct speed profiles,
,
, and
, vary with distance. These profiles are derived from human driving data and exhibit varying degrees of deceleration. Among them, the
profile experiences the least deceleration, maintaining a constant speed as it enters the roundabout. It reflects efficient driving behavior under clear traffic conditions and low roundabout traffic volume. The
profile, in contrast, involves initially slowing down before accelerating to enter the roundabout. This profile is typical when roundabout traffic is uncertain, where preemptive slowing allows drivers to better assess the traffic flow. It balances comfort, efficiency, and safety, avoiding a full stop while contributing to smooth overall traffic flow. The
profile requires the vehicle to slow to a stop near the entrance, then accelerate when it’s safe to enter the roundabout.
Finally, the discretized state-action space consists of 201 × 51 × 3 = 30,753 sampling points, summarizing the discretization scheme of the state space S and the three actions from action space A.
2.4. Reward Function
The reward function establishes the objective of the decision-making process. When merging into a roundabout, the primary goal is to enter safely, avoid collisions, and maintain a smooth traffic flow. Drawing from mechanical principles and constitutive relationships, our goal is to develop a more comprehensive model of a vehicle’s merging behavior.
The constitutive relation originally described the mathematical expression of material deformation under external forces such as compression or shear. It characterizes the mechanical behavior of materials and defines the relationship between stress (or other physical quantities) and strain (or other state variables). A viscoelastic–plastic constitutive model consists of three basic components: elastic, viscous, and plastic. These components can be combined in series or parallel to simultaneously exhibit viscous, elastic, and plastic properties. Two common types of two-element viscoelastic models are the Maxwell model, which combines elastic and viscous components in series, and the Kelvin–Voigt model, which arranges them in parallel.
Therefore, the application of force and stress concepts to traffic modeling is mainly an analogy between the distance or speed motion state between traffic participants and the behavior of materials under stress, not real forces. For instance, when the relative distance between the ego and host vehicles is large, the ego vehicle tends to accelerate, whereas a smaller distance encourages deceleration, which is akin to the behavior of an elastic component. Likewise, when the speed difference between vehicles is large, the ego vehicle accelerates, whereas a smaller speed difference results in deceleration, similar to the behavior of a viscous component. Thus, the motion of the vehicle can be directly linked to the behavior of the constitutive elements.
Based on the successful application of the constitutive relationship to the car-following model [
28] and the lane-changing model [
29], this paper further expands the application scenarios of the constitutive relationship. We use a viscoelastic model to simulate the dynamic interaction between the ego vehicle and other vehicles in a roundabout to better capture the real-time dynamics of vehicle interaction.
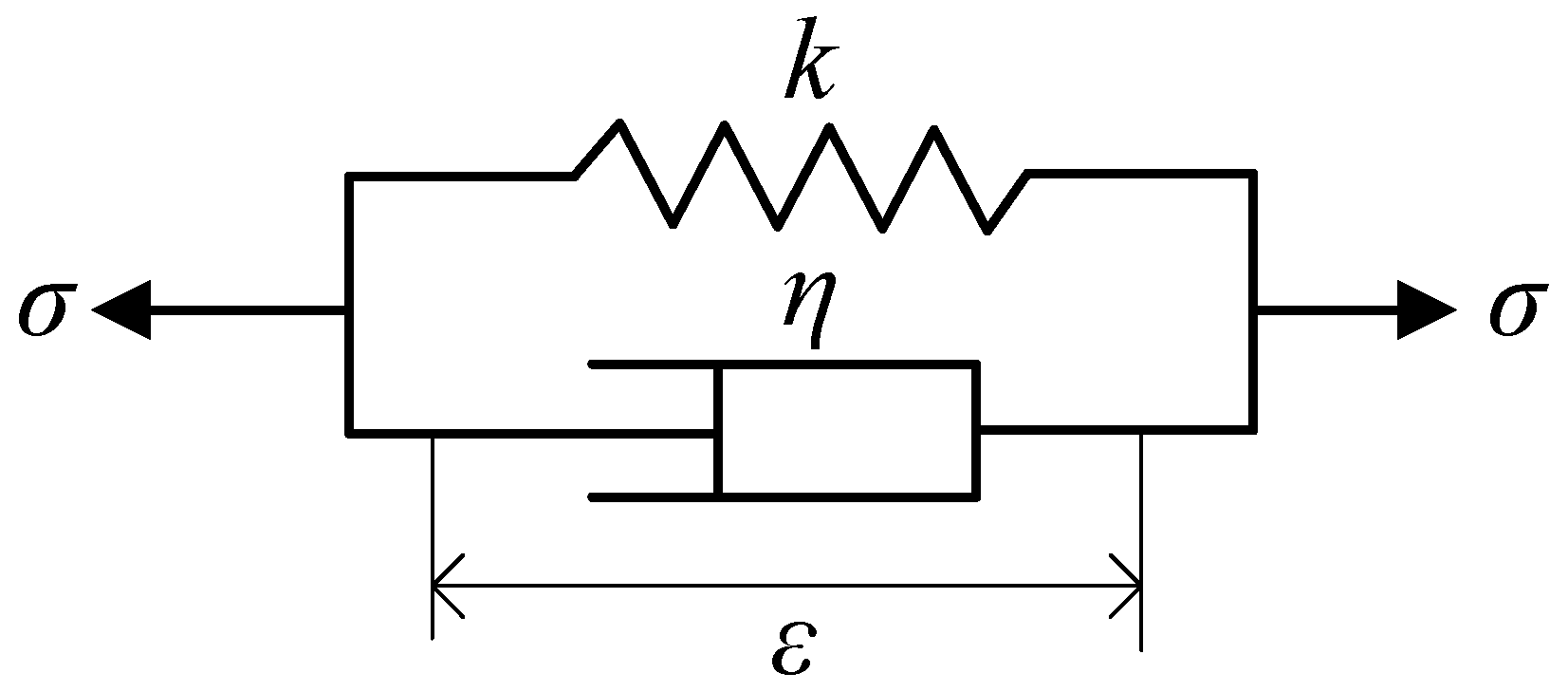
This study proposes a force-based merging reward model for roundabouts, represented using a parallel viscoelastic constitutive relation, as shown in
Figure 2. In this model,
and
represent the elastic and viscous components, respectively. Meanwhile,
k and
characterize elastic and viscous properties, respectively. Under parallel conditions, the strains in both the elastic and viscous components were identical, and the total stress was the sum of the individual stresses, as expressed in Equation (
11):
In the roundabout merging scenario, the ego vehicle’s driving behavior (
,
, and
) is influenced not only by the relative distance and speed between the ego vehicle and other vehicles, but also by its current position within the roundabout. As shown in
Figure 1, the
behavior begins to diverge from the
and
behaviors at approximately 25 m from the yield line, whereas
and
start to differ at approximately 10 m. To make human-like driving decisions, the ego vehicle must identify the appropriate driving behavior at critical decision points when entering a roundabout.
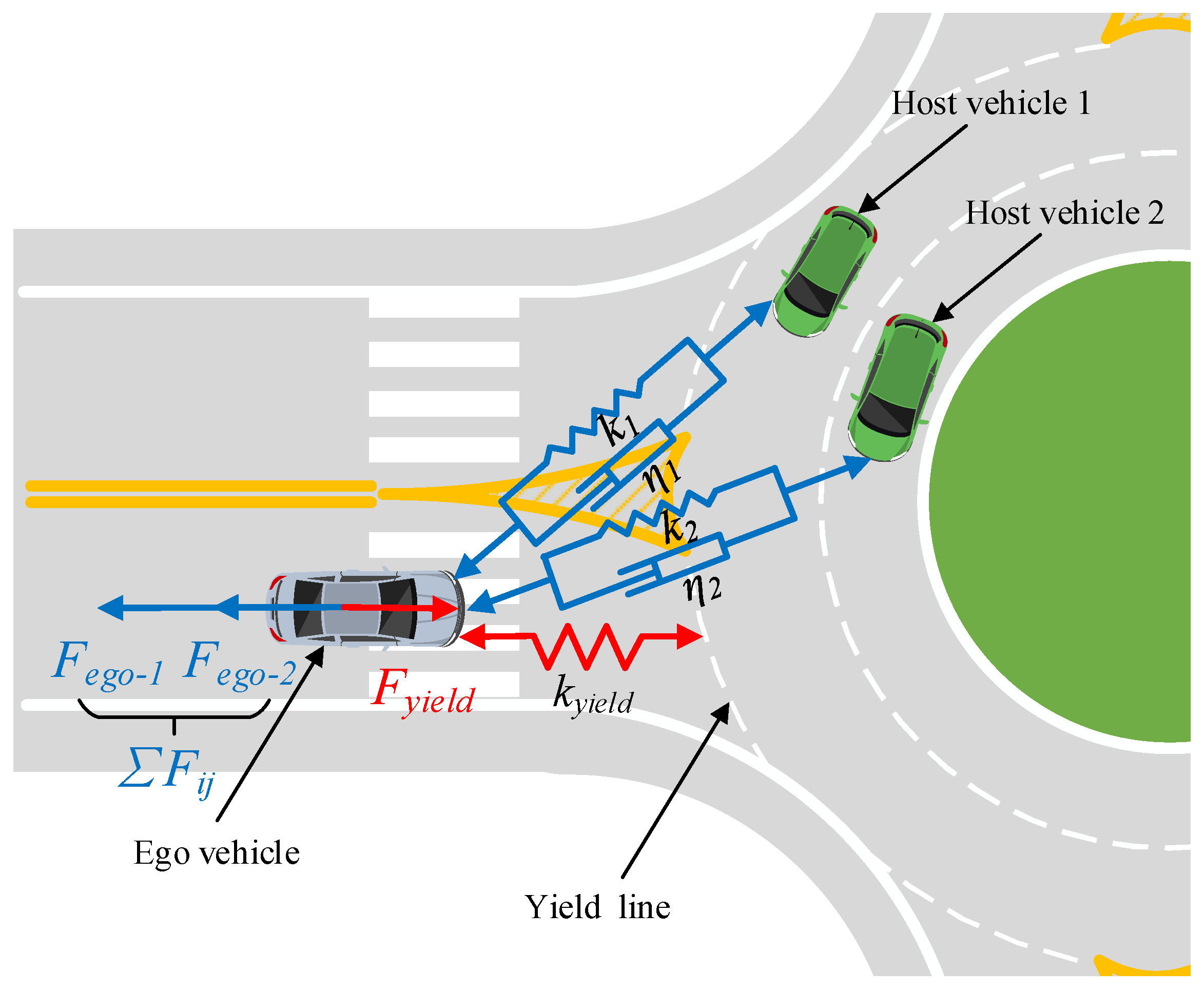
Therefore, as shown in
Figure 3, the total interaction force
when the vehicle enters the roundabout is the difference between the interaction force between the ego vehicle and roundabout
, and the interaction force between the ego vehicle and other vehicles in the circulatory road
, as expressed below:
The interaction force
between the ego vehicle and roundabout is linked to the decision distances of the three driving behaviors. The objective is to ensure that the interaction forces (reward value) for each driving behavior reach their maximum values near their respective decision distances in sequence. The interaction forces for the three driving behaviors,
,
, and
, are expressed as follows:
where
,
, and
are undetermined coefficients;
represents the relative position of the ego vehicle and the yield line; and
,
,
represent the relative position of the three driving behavior decision points and yield line, respectively.
The interaction force
represents the influence of a nearby vehicle
j on ego vehicle
i at time
t within the perceptual range of the circulatory road at roundabouts. The magnitude of the interaction force is determined by the differences in the distance
and speed
between the two vehicles:
where
,
, and
are undetermined coefficients;
represents the safety distance between ego and host vehicles [
33]; and
and
represent the relative distance and speed between ego vehicle
i and host vehicle
j at time
t, respectively.
Furthermore, the interaction forces
under the three driving behaviors were different. The specific expressions of
,
, and
are as follows:






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}