1. Introduction
The study of difference equations has expanded significantly over the past decade. The reason for this is that these equations are used in modeling real-life problems in a wide range of fields of science. For example, in biology, these equations can be used in modeling some natural phenomena, such as the size of a population at time
n, the blood cell production, and the propagation of annual plants, while in economics these equations have been used to study the pricing of a certain commodity and the national income of a country [
1,
2,
3].
In this paper, we study the general solution and the dynamical behaviors of the rational difference equation
where
a,
b, and
c are real numbers with
, and the initial conditions
and
are real numbers. Also, we study the bifurcations that occur in this equation. Cinar [
4] investigated the positive solutions of the rational difference equation
Cinar [
5] investigated the solutions of the difference equation
where
. Cinar [
6] investigated the positive solutions of the difference equation
where
. Aloqeili [
7] discussed the stability properties and semi-cycle behavior of the solution of the difference equation
where
. Andruch-Sobi and Migda [
8] investigated the asymptotic behavior of all solutions of the rational difference equation
with a positive
a and
c, negative
b, and non-negative initial conditions
and
. The same equation with a positive
b was considered in [
9]. Elsayed [
10] obtained the solutions of the rational difference equation
Abo-Zeid [
11] introduced the solutions of the rational difference equation
Ghazel et al. [
12] obtained the solutions and the dynamical behaviors of the rational difference equation
Karatas et al. [
13] investigated the positive solutions of the difference equation
Abo-Zeid [
14] investigated the global behavior of all solutions of the rational difference equation
Karatas [
15] obtained the solution of the rational difference equation
Karatas et al. [
16] proved the global asymptotic stability of the equation
Moreover, they obtained the solutions of some special cases of this difference equation by applying the standard iteration method. The study of the dynamical behaviors of the solutions of rational difference equations, such as local and global stability, periodicity, and bifurcations, has been discussed by many authors—for examples, see [
2,
16,
17,
18,
19,
20,
21] and the references therein.
The present paper is motivated by the incomplete analysis of Equation (
1). We extend the work of [
4,
5,
6,
7,
8,
9] by studying its general form with
a,
b, and
c as real numbers with
, and the initial conditions being arbitrary real numbers. We perform a comprehensive stability analysis, considering not only the trivial equilibrium point and instability regions of other equilibrium points but also the stability regions of all equilibrium points of Equation (
1). Furthermore, we investigate the existence of bifurcations in Equation (
1). Importantly, previous studies have not addressed the bifurcation analysis of this equation. The setup of this paper is outlined as follows. In
Section 2, we show that Equation (
1) has only three equilibrium points. We discuss the stability of these points. We show that the equilibrium point
is globally asymptotically stable (see also
Section 3). On the other hand, we show that the equilibrium points
and
are never linearly stable. In
Section 3, we obtain the analytical solution of Equation (
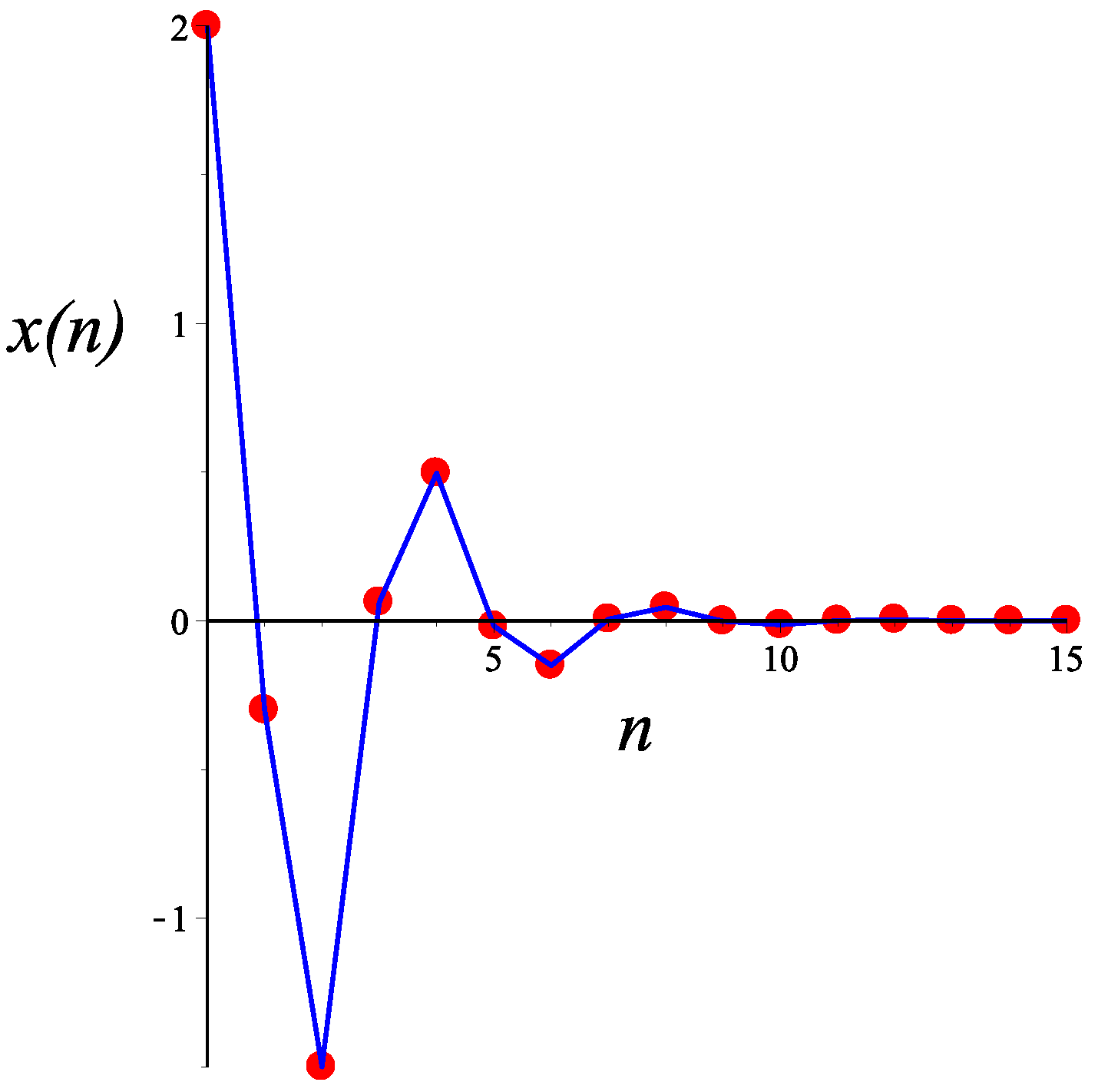
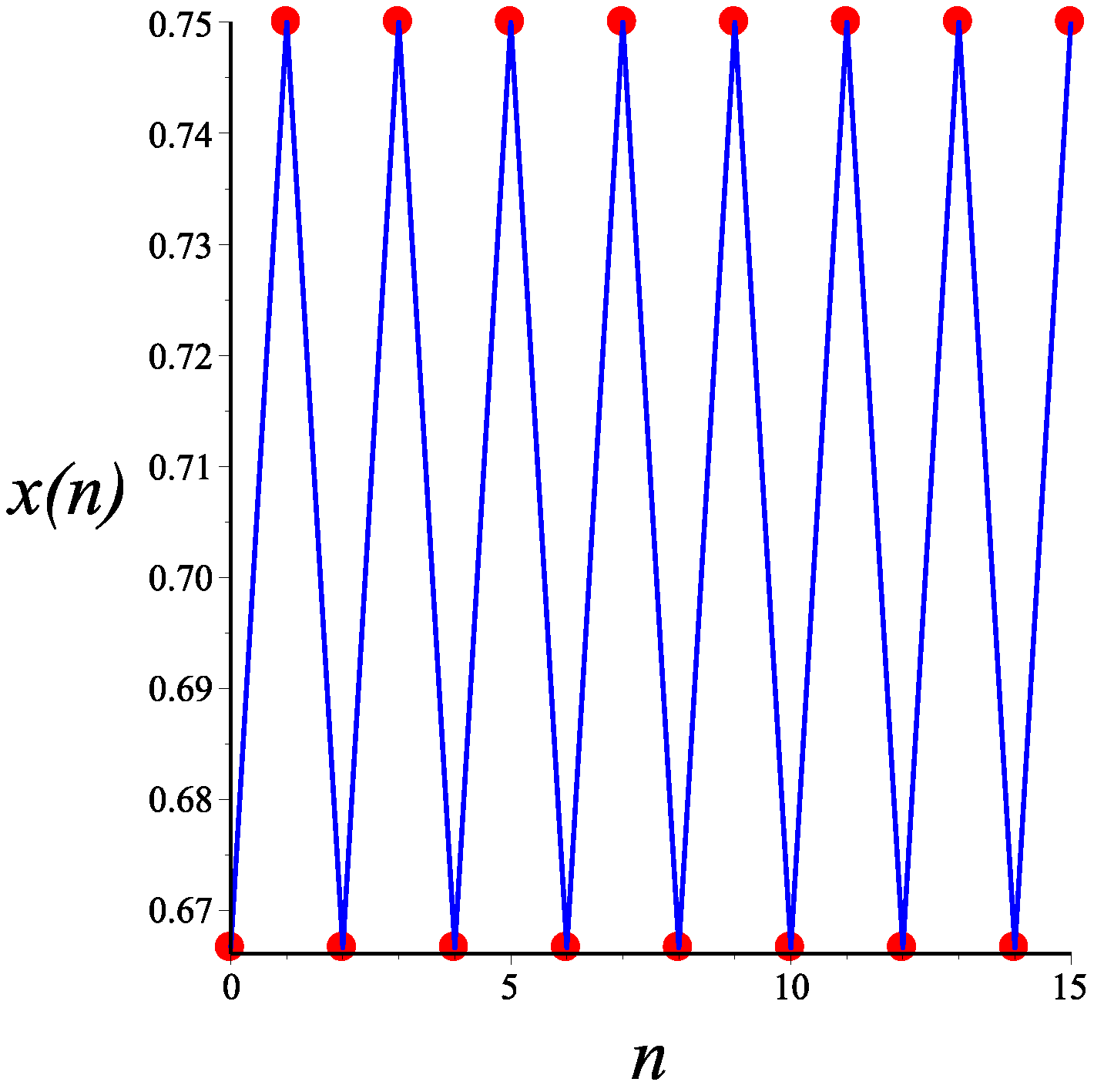
1). We prove that, if
, then every solution of Equation (
1) converges to zero even if we choose negative initial conditions. Furthermore, we discuss the dynamic behaviors of the solution and the periodic solutions of Equation (
1). In
Section 4, a complete bifurcation analysis is presented. We show that Equation (
1) exhibits a Neimark–Sacker bifurcation. For this bifurcation, we compute the topological normal form. In
Section 5, we use a nonlinear stability criterion to better understand the stability of the equilibrium points
and
where the characteristic equation evaluated at these points always has one root less than one and the other is equal to −1. This criterion is based on stability analysis in the direction of the eigenvector corresponding to the eigenvalue equal to −1. We show that these points are stable and we always have small regions of stability in their domain. In
Section 6, we perform a numerical simulation as well as a numerical bifurcation analysis to confirm our theoretical results.
2. Preliminaries
Here, we present some known results that will be useful in the study of Equation (
1). Let
and let
be a continuously differentiable function. Then, for any initial conditions
, the difference equation
has a unique solution
.
Definition 1. A point is called an equilibrium point of Equation (2) if . Definition 2. A solution is said to be periodic with period t if A solution is called periodic with prime period t if t is the smallest positive integer for which Equation (3) holds. Definition 3. Let be an equilibrium point of Equation (2). - 1.
is called stable if for every , there exists such that for all and , we have , for all .
- 2.
is called locally asymptotically stable if is stable and there exists , such that for all and , we have .
- 3.
is called a global attractor if for all , we have .
- 4.
is called globally asymptotically stable if is stable and is a global attractor.
- 5.
is called unstable if is not stable.
Let
where the function
f is given in Equation (
2) and
is an equilibrium point of Equation (
2). Equation (
4) is the linearized equation of Equation (
2) about
. The characteristic equation of Equation (
4) is
Theorem 1. Assume that f is a continuously differentiable function and let be an equilibrium point of Equation (2). Then, the following statements are true. - 1.
is locally asymptotically stable if all roots of Equation (5) (i.e., the eigenvalues) have absolute value less than 1. - 2.
is unstable if at least one root of Equation (5) has an absolute value greater than 1.
The change in variables
(with
) reduces the Equation (
1) to the rational difference equation
where
.
Theorem 2. Equation (6) has exactly three equilibrium points, which are given by Proof. For the equilibrium points of Equation (
6), we can write
. Then, we have
. Therefore, the equilibrium points of Equation (
6) are
when
and
when
. □
The linearized equation associated with Equation (
6) about the equilibrium point
is given by the linear difference equation:
The characteristic equation corresponding to Equation (
7) is
The following corollary directly follows from Theorem 1.
Corollary 1. If , then the equilibrium point of Equation (6) is locally asymptotically stable. Note that, for the equilibrium points
, the characteristic Equation (
8) has two eigenvalues, namely
and
for all
. Since there is always one root equal to
, then the equilibrium point is never locally asymptotically stable. The stability analysis of the equilibrium points
and
will be discussed in
Section 5.
4. Bifurcation Analysis
While varying the parameter
of Equation (
6), we generically encounter one codim-1 bifurcation related to stability changes of the equilibrium point
, namely Niemark–Sacker (NS) bifurcation, where the characteristic Equation (
8) has a simple pair of complex roots
with
. This bifurcation occurs at
when
. A nongeneric situation occurs at a pitch-fork bifurcation (PF) when
(note that the equilibrium point
splits into two symmetric branches of equilibrium points
and
as the value of
crosses the critical parameter value
—see also Figure 2). We will use the normal form theory for discrete-time dynamical systems (see [
22,
23]) to study the NS bifurcation of Equation (
6).
If we set
, Equation (
6) can be rewritten as the following two-dimensional system of rational difference equations
where
and
are real numbers with
for all
. System (
12) can be expressed in vector form as
where
and
. Then, the equilibrium points of System (
13) can be computed by solving the system
. Therefore, System (
13) can have only three equilibrium points, namely
,
, and
. Note that these equilibrium points are the same points as in Theorem 2. We calculate the Jacobian matrix at the equilibrium point
of System (
13):
The characteristic equation of the Jacobian matrix
A is
which is the same equation as in Equation (
8). Assume that for some
, System (
13) has a NS bifurcation at
. The Taylor expansion of
about
can be written as
where the dots denote higher-order terms in
,
denotes the Jacobian matrix evaluated at
given in Equation (
14), and
and
are vectors with two components. These vectors are defined by
where
,
,
, and
When the parameter
crosses the critical value
(i.e., the NS point), the Jacobian matrix evaluated at
has a simple pair of complex eigenvalues
and
, and
. Hence,
. Assume that
are two right eigenvectors of
A and the transposed matrix
corresponding to
and
, respectively, i.e.,
and
. Then, for
, we have
We normalized these vectors such that
, where
is the standard complex inner product, i.e.,
. Therefore, the vectors
p and
q become
Then, for parameter values
close to
, the restriction of (
6) to a parameter-dependent center manifold is locally smoothly equivalent to
where
w is a complex variable,
,
, and
The first Lyapunov coefficient for the NS bifurcation is
5. Stability Analysis
The equilibrium points
and
are never linearly asymptotically stable because the Jacobian matrix (
14) always has an eigenvalue equal to −1, i.e., the root
of the characteristic Equation (
8). The stability of these points can be determined by a nonlinear stability analysis in the direction of the eigenvector corresponding to
.
Let
be an equilibrium point of System (
13). For
, let
be a small perturbation of
where
e is the right unit eigenvector corresponding to the eigenvalue
. Then, we can decompose the function
as
where
and
are scalars and
z is an eigenvector corresponding to the eigenvalue
. Taking inner products of (
24) with the left eigenvector
corresponding to the eigenvalue
, we obtain
In the sense of the definition of stability associated with a specific eigenvector of the linearized system at an equilibrium point
(see for example ([
24], Chapter 2)), we can say that the equilibrium point
is stable in the direction of the eigenvector
e if
for all sufficiently small
. Moreover, the equilibrium point
is unstable in the direction of the eigenvector
e if
for arbitrarily small values of
.
The vectors
e and
are given by
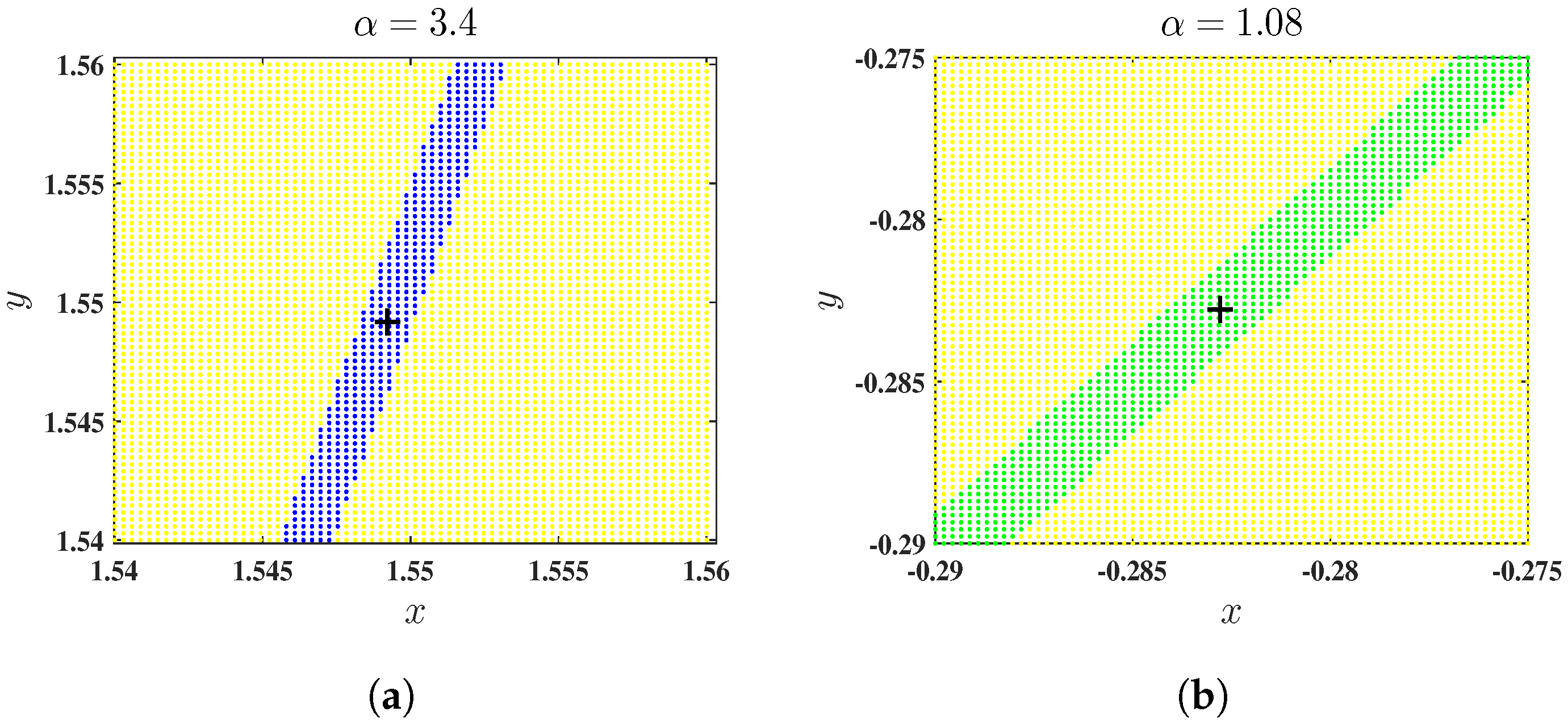
We numerically compute the value
for a large number of values of
for
and
The results are presented in
Figure 1. The equilibrium points where
are plotted in blue; the equilibrium points where
are plotted in green. In red, we label the points where
change signs. It is remarkable that a small domain of attraction where the equilibrium points remain stable can always exist. As the value of
increases, this domain shrinks, but it still exists around the equilibrium points. Therefore, the equilibrium points
and
are stable for
.
Combining the results we have collected with the results in
Section 4, we can draw the bifurcation diagram of System (
13) (i.e., Equation (
6)), as shown in
Figure 2.
7. Conclusions
We show that Equation (
1) has exactly three equilibrium points. The trivial equilibrium point
is globally asymptotically stable, while the equilibrium points
and
are never linearly stable. Using a nonlinear stability analysis criterion based on studying a small perturbation in the direction of the eigenvector corresponding to an eigenvalue equal to −1, we show that the equilibrium points
and
are stable (for
) with a small domain of attraction. Additionally, we obtain an explicit formula for the general solution of Equation (
1). We prove that if
, then every solution of Equation (
1) converges to zero. We compute solutions of period 2 and 4 of Equation (
1). Moreover, a complete bifurcation analysis is presented. We show that Equation (
1) exhibits a Neimark–Sacker bifurcation. For the NS bifurcation, we compute the topological normal form. Finally, we perform a numerical simulation as well as a numerical bifurcation analysis using the Matlab package MatContM to confirm our theoretical results.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}