1. Introduction
Redundant manipulators (RMs) have gained significant attention due to their greater number of degrees of freedom (DOFs) than the minimum required to perform a task [
1]. Unlike traditional manipulators that possess only the minimum DOFs required to complete a task, RMs offer an expanded workspace along with enhanced flexibility and adaptability [
2,
3,
4]. This surplus of DOFs allows RMs to accommodate additional functional constraints while simultaneously performing their primary tasks [
5]. With these advantages, RMs are well-suited for a wide range of complex scenarios, including spacecraft maintenance [
6], nuclear reactor maintenance [
7], aeroengine inspection [
8,
9], and medical surgery [
10,
11].
Despite their numerous advantages, RMs present significant challenges due to the excess DOFs, which render the IK problem ill-posed [
12]. The nature of redundant DOFs typically leads to multiple feasible inverse kinematic solutions for a given End-effector pose. Therefore, IK optimization for a specific pose is a crucial issue in the study of RMs. To address this challenge, researchers have proposed optimizing various performance metrics, including avoiding joint limits [
13,
14], minimizing joint torque [
15,
16], and maximizing manipulability [
17,
18]. Among these metrics, respecting joint limits is a fundamental principle in IK solutions. Since joint variables are constrained by mechanical limits, violating these limits can result in mechanical boundary collisions or structural damage. When joints reach their limits, semi-singularity issues arise, which are more complex to handle than kinematic singularities [
19]. Therefore, avoiding joint limits remains a classic and critical issue in the IK optimization of RMs.
In previous studies, a performance metric for avoiding joint limits was proposed in [
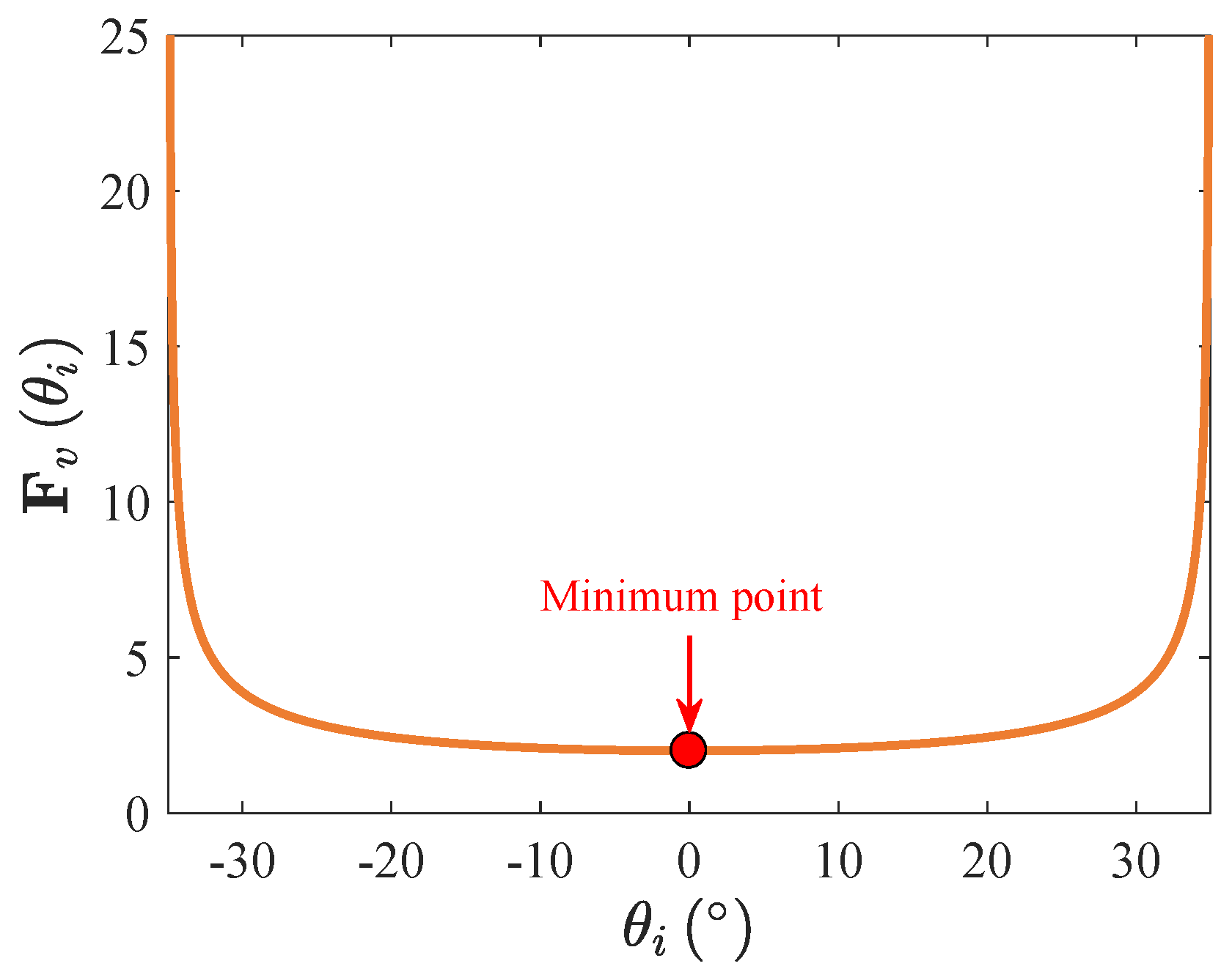
20]. However, this metric does not directly indicate whether a joint has reached its limits. To address this limitation, a new performance metric for joint limit avoidance was introduced in [
21]. This metric approaches infinity as the joint limits are reached, achieves its minimum value at the midpoint of the joint range, and has been widely adopted in various methods for avoiding joint limits [
14,
22,
23,
24]. Most of the existing studies solve the IK problem using Jacobian-matrix-based optimization methods, where the problem is addressed in the velocity domain. A typical method is the gradient projection method (GPM), which has been extensively applied in joint limit avoidance [
20,
21,
25,
26,
27]. These velocity-based optimization methods for the IK problem require integrating angular velocities over time. The prolonged integration process can result in accumulated errors, leading to deviations in the final results in the position domain. On the other hand, some studies have proposed methods for directly solving the IK problem in the position domain. These methods avoid the accumulated errors in the velocity integration process, offering a more accurate assessment of the manipulator’s state in the task space. Some studies derived closed-form IK solutions for specific redundant manipulators in the position domain [
28,
29,
30]. Additionally, the forward and backward reaching inverse kinematics (FABRIK) algorithm proposed in [
31], which solves the IK problem through geometric iterations, can rapidly reach the target pose and is unaffected by singularity issues. The FABRIK algorithm has been widely applied to cable-driven segmented manipulators [
32], multi-segment continuum robots [
33], and continuum robots [
34]. However, these methods have certain limitations. Specifically, methods [
25,
26,
27] require time integration to obtain joint angles, which can introduce accumulated errors, leading to inaccurate solutions. Methods [
28,
29,
30] are limited to specific manipulator structures and cannot accommodate arbitrary configurations. Methods [
31,
32,
33,
34] rely on geometric iteration without global search capability, preventing them from ensuring the identification of the optimal solution. In contrast, this paper introduces a novel IK optimization method for RMs that prioritizes both accuracy and optimality. The goal is to obtain a set of accurate and optimal IK solutions.
Although the aforementioned studies have made significant progress in IK optimization, no research has yet addressed the adjustable IK problem for RMs while avoiding joint limits and singularities. In various application scenarios, IK solutions often need to be adjusted to satisfy different requirements. Therefore, research on adjustable IK solutions for RMs is essential. This paper proposes a novel IK optimization method for RMs, aiming to achieve adjustable IK solutions that avoid both joint limits and singularity issues. A performance metric for adjustable IK solutions is developed by introducing the motion-level factor, which allows the IK solutions to be adjusted by modifying this factor. We propose a two-stage optimization algorithm to compute adjustable IK solutions by integrating velocity-based and position-based IK approaches. In the first stage, a modified GPM is employed to optimize the performance metric for adjustable IK solutions, generating a set of initial optimal solutions. In the second stage, the FABRIK algorithm is applied to refine the initial solutions, effectively eliminating the cumulative errors generated in the first stage. The proposed method combines the advantages of both velocity-based and position-based IK methods, not only enabling the generation of adjustable IK solutions but also significantly improving their accuracy.
The contributions of this work are summarized as follows:
To achieve adjustable IK solutions, we develop a performance metric by introducing a motion-level factor. By customizing this factor, the IK solutions can be tailored to meet specific requirements.
To obtain adjustable IK solutions, we propose a two-stage optimization algorithm. This algorithm not only generates adjustable IK solutions but also significantly enhances their accuracy.
The manipulability of an RM is a function of the joint variables. By adjusting the motion-level factor, manipulability can be regulated.
The paper is organized as follows:
Section 2 presents the problem formulation.
Section 3 presents a two-stage optimization algorithm for adjustable IK solutions.
Section 4 illustrates the proposed method using a planar cable-driven redundant manipulator.
Section 5 presents numerical simulations of the proposed method.
Section 6 offers experimental validation, and
Section 7 concludes this paper.
7. Conclusions
RMs often have an infinite number of feasible IK solutions for a given pose. This work presents an IK optimization method for RMs, aimed at obtaining adjustable IK solutions. By introducing the motion-level factor, we develop a performance metric for adjustable IK solutions. Adjusting the motion-level factor changes the position of the minimum value of the performance metric within the joint limits, thereby providing flexible control over the distribution of the IK solutions. A two-stage optimization algorithm is proposed to obtain adjustable IK solutions. In the first stage, a modified GPM is used to optimize the performance metric for the adjustable IK solutions, yielding the initial optimal solutions with the desired motion level. However, since the GPM introduces cumulative errors, the second stage employs the FABRIK algorithm to enhance accuracy, producing precise and optimal IK solutions while avoiding joint limits and singularity issues. Through simulations and experimental validation on a planar CDRM, the effectiveness of the proposed method is demonstrated. The IK solutions are successfully adjusted by modifying the motion-level factor, resulting in smooth and continuous solutions. Moreover, the manipulability of RMs can be regulated by adjusting the motion-level factor. This method provides an effective solution to the adjustable IK problem for RMs and is applicable to various types of RMs.
However, our method has certain limitations, such as the lack of experiments with a three-dimensional redundant manipulator. The method may demand substantial computational resources when addressing the inverse kinematics problem of a redundant manipulator with many DOFs, as it requires computing the pseudoinverse of the Jacobian matrix throughout the solution process. In future work, we plan to validate our method on three-dimensional redundant manipulators and further refine it. Additionally, adjustable inverse kinematics solutions can be leveraged to regulate the stiffness performance of redundant manipulators.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}