1. Introduction
Containment control is receiving lots of attention owing to its diverse potential applications, such as cooperative surveillance, vehicle fleets, sensor networks, and unmanned aircraft clusters, and its main aim is to develop a distributed algorithm for agents to reach into a convex hull spanned by the leader. The article [
1] firstly studied containment control by proposing a stop–go algorithm. Following [
1], containment control subject to fixed communication graph was investigated in, e.g., [
2,
3,
4,
5,
6,
7]. For example, refs. [
2,
3] focused on systems with dynamic leaders, addressing containment control under different measurement and dynamic constraints. Ref. [
4] established necessary and sufficient conditions to ensure the achievement of containment control, providing a theoretical foundation for such systems. The case of finite-time convergence was further explored in [
5], which proposed a distributed control strategy to achieve convergence within a finite time frame. Additionally, refs. [
6,
7] investigated containment control under communication delays. The containment control of switching graphs was also studied in [
8,
9,
10,
11,
12]. Ref. [
8] proposed a distributed control strategies for connectivity preservation to handle dynamic edge additions in communication graph. Subsequently, [
9,
10] studied distributed containment control of first-order MASs with switching topologies, and [
11] studied the distributed containment control for second-order MASs with random switching topologies. In addition, cooperative control for high-order MASs was investigated in [
13,
14,
15] subject to directed graph, and refs. [
16,
17] studied the case involving communication time delays. In practical applications, agents may exhibit different dynamics due to diverse restrictions. Consequently, it is necessary to investigate containment control of MASs with heterogeneous dynamics. In [
18], containment control of heterogeneous MASs was studied when the leaders are assumed to be exosystems. The article [
19] investigated containment control of heterogeneous networks using a hierarchical fault-tolerant design approach. In addition, based on generic linear systems model, refs. [
20,
21,
22] studied containment control of high-order heterogeneous MASs. Ref. [
21] studied approximate output regulation for heterogeneous MASs subject to unknown and nonidentity nonlinearity. Note that in the articles mentioned above, each agent is operating in an ideal environment free from constraints.
In recent years, researchers have increasingly focused on addressing input constraints in their works of MASs accounting for the practical physical limitations, i.e., limitations on steering and acceleration for autonomous cars, pitch and thrust for quadcopter drones, and propulsion for underwater exploratory vehicles. There are many previous work of multi-agent systems on constraints such as [
23,
24,
25,
26]. Moreover, input saturation constrains have been extensively studied in previous works, such as ref. [
27], who studied semi-global and global containment control of second-order MASs with input saturation, and ref. [
28], who studied adaptive fuzzy containment control of high-order MASs with full state constraints. In line with the approach pioneered by [
29], which addressed velocity nonconvex constraints, refs. [
30,
31] considered position convex constraints and input nonconvex constraints on containment control problem respectively. Ref. [
32] extends the investigation to containment control problem of second-order MASs with velocity and input nonconvex constraints. Ref. [
33] studied containment control of second-order heterogeneous MASs subject to input nonconvex constraints and switching communication graphs. There are also works about high-order heterogeneous MASs considering input constraints, e.g., [
34], but their focus primarily centers on the consensus problem. There is no existing research, as far as we know, on containment control of high-order heterogeneous MASs with input nonconvex constraints.
In this work, we consider containment control for high-order heterogeneous continuous-time MASs subject to control input nonconvex constraints, bounded delays, and switching communication graphs. Although the high-order integral heterogeneous systems considered in this paper can be viewed as a specific case of the general linear systems addressed in [
20,
21], refs. [
20,
21] did not account for the intricate scenarios involving constrained control inputs, which leads to a difference in the analysis methods applied on state variables. Compared to [
33], our investigation extends to a broader spectrum by incorporating additional complexities, specifically addressing time delays and high-order integral dynamics. Compared to [
34], the analysis method of stochastic matrix in the consensus problem cannot be applied in this paper, where the distance between the agents and leaders should be analyzed to prove the congergence of containment control. The main difficulty of our work is that, in high-order heterogeneous MASs, the coupling of high-order state variables of agents and the difference of heterogeneous dynamics between agents make the nonlinearity of input nonconvex constraints more difficult and complex to analyze, which means that all the results introduced above cannot be directly applied to this paper. Noting that severe communication delays have the potential to disrupt the system stability, the consideration of communication delays can further extend the applicability of our results.
The structure of this work is outlined as follows. Firstly, we use a scaling factor for the constraint operator to obtain an equivalent unconstrained system model. After some equivalent model transformation, we evaluate the maximum distance from all agents to the convex hull spanned by leaders using norm-based differentiation. It is demonstrated that, within high-order heterogeneous continuous-time MASs subject to control input nonconvex constraints, each agent is driven into the convex hull of leaders, provided that there exists at least one directed path from any leader to each agent within the union of communication graphs.
Notations: represents the m-dimensional real column vector set; represents the real matrices with dimensions ; denotes the set of non-negative integers; and represent the transpose and the standard Euclidean norm of vector v, respectively; is the Euler’s number; represents the inverse function of . For a closed convex set X, is a projection operator such that ; represents the factorial product of all positive integers from 1 to n for some integer n, with defined to be 1; is the combinatorial number for some positive integers .
2. System Model and Problem Statement
Suppose that the
lth-order heterogeneous MAS under consideration consists of
n heterogeneous agents and
m static leaders, where
represents the number of
sth-order agents for
and
. Each
th-order agent
i has the following dynamics:
for all
, where
is the
jth-order state for
, and
is the input for some positive integer
r. Specially, when
, each first-order agent has the subsequent dynamics:
for all
.
The communication graph of system (
1) at time
t is represented by
, where
represents the set agent,
denotes the edge set, and
denotes the weighted adjacency matrix [
35]. We assume that
when
, and
for some constant
when
. An ordered edge sequences
means a directed path, where
. Let
represent the leader set. For agent
i, the neighbor set is denoted as
. Let
represent the convex hull formed by leaders in
, where
represent the position of the leader
. Let
denote the maximum distance between all leaders
and
denote the maximum distance from the original point to each leader for
.
In practical systems, the control inputs of agents often suffer irregular constraints inevitably, owing to physical or performance limitations, e.g., the maximum inputs in various directions of quadrotors typically vary, and all control inputs must remain within specific nonconvex sets. Hence, we assume that for all and all where is a nonconvex set.
To elaborate on input nonconvex constraints, we begin by introducing a constraint operator from [
29], which satisfies that
, when
, and
when
, where
X represents a nonconvex set and
v is a vector. The purpose of the operator
is to determine the maximum magnitude of vector such that
holds for all
,
, and
shares the same direction as
v. In this paper, the constraint set
of agent
i is only required to possess general nonconvexity, with the origin point serving as its interior point.
Assumption 1 ([
29])
. Suppose that is the closed nonempty bounded set such that and , where and are constants. With the consideration of the nonconvex input constraints, the input of each agent in this work is proposed as follows:
for all
, where
for
is the damping gain of the
sth-order state
,
is the edge weight,
represents the convex hull formed by leaders from which agent
i obtains information at time
t, and
when
. The time delay of agent
i receiving information from neighbor
j is
, where
is the maximum communication delay. In (
3), the role of
is a simplicity expression of the original unconstrained algorithm, the damping term
is employed to induce a tendency for agent
i to remain stationary, the term
is employed to induce a tendency for agent
i to follow neighbor agents, and the term
is employed to drive agent
i into
H. The parameter
if
, and
if
. Let
be a positive constant such that
for all
.
The objective of this work is to propose a distributed algorithm to finally make each agent converge into the convex hull H spanned by leaders in , i.e., for each , while ensuring that all agent inputs remain within respective nonconvex constraint set, i.e., , .
3. Main Results
3.1. A Scaling Factor of the Constraint Operator and Model Transformation
To deal with the nonlinearity of constraints, we define a scaling factor when , and, in particular, when . It is obvious that and for all and i. We denote the state matrix of whole multiple agents system as , where , when and , and for any lth-order agents .
For further convex analysis, we make a model transformation in this subsection. For
sth-order agent
, we define the state vector
and
, where
for some positive constants
.
Then the system (
1) with (
3) can be equivalently transformed as
where
,
, and
is a coefficient related to
,
, and
. Given the definition of
and
, we can deduce that
for all
. Specially, when
, the equivalent system can be written as
for all
.
According to (
1), (
3), and (
4), we define
where
for
and all
t. Note that
. Hence, we can deduce that
and
. Then, we have
Note that
is related to the designed control input parameter
. It is obvious that (
6) has solutions with respect to
for any given parameters
and
.
Assumption 2. Suppose that , , and , for and all t.
Assumption 3. Consider an infinite time instant sequence , where , and M are positive constants. Suppose that during each time interval , there exists at least one directed path from any leader to each agent i in the union of the communication topologies.
Assumption 3 means that during each time interval , each agent has a connection with leaders in directly or indirectly.
Remark 1. Assumption 3 implies the existence of a directed spanning tree rooted at one of the leaders in the union of communication topologies during each time interval . This condition is weaker than strong connectivity but ensures that the leaders’ influence can propagate to all agents, which is crucial for achieving the objective of containment control.
3.2. The Maximum Distance from Agents to the Convex Hull
To study the convergence of MAS (
4), we first prove the nonincreasing property of the maximum distance from agents to the convex hull spanned by leaders and then we will show the maximum distance diminishes to 0 over time. Consider a Lyapunov function
where
,
,
and
.
From (
4) and the definition of derivative, we have
for
and
is a sufficiently small positive quantity, and
denotes the time just after time
t. Recall the definition of
for
; obviously
. Hence, we have
and
According to (
6), we have
. As
for all
, if
, we have
when
.
As for each first-order agent
i for
, similar to the derivation of (
9), we have
Let denote a constant such that , i.e., . Define the positive constants and for all . Define a positive constant . From Assumption 2, we have and .
Note that
and
. Obviously, under Assumption 2, each coefficient of (
8) and (
9) is lower bounded by some positive constants, and the sum of all coefficients of (
8) and (
9) are both 1. Then, from the properties of convex combination, we have
and
, where
,
,
and
. That is,
for all
. It can be obtained that
. Obviously,
,
, and
. Define
for convenience of expressions. Hence, we have
where
is a positive constant.
3.3. Convergence Analysis of the System
We first analyze the convergence of MAS in the time interval for in two lemmas. Specifically, for , Lemma 1 investigates the convergence of the distances and when , and Lemma 2 investigates the convergence of the distance when an agent can obtain information from leaders or some different agent with a distance .
From the definition of derivative and (
8), it can be obtained that
for
. Also, from (
9), we have
Similarly, if
, then from (
10), we have
Lemma 1. If there is an agent such that for some constant , then we have for some constant .
Proof. From (
13), for all
, we have
and, hence, we have
for
and obviously
. From (
14), we have
for
. Note that
. Then, it follows that
for
. Noting that
,
, and
, we have
for
and
.
Then, from (
13), we have
, for
, where
,
, and
. By analogy, we have
, for
, where
and
for
. Then, we have
, where
, and, obviously,
. Then we have
,
.
Thus far, it is shown in Lemma 1 that are strictly smaller than the Lyapunov function , i.e., for and , if is strictly smaller than the Lyapunov function . It should be noted that is a bounded and finite constant.
Lemma 2. If there is an agent connecting to at least one leader in or connecting to another agent with at some time instant for some constant , i.e., or , then we have for and some constant .
Proof. If
, then from (
14), we have
for
. Note that
for all
and
. Then, we have
Thus, we have
and
for
.
Similarly, if
, it can be easily obtained from (
14) and the definition of
that
for
.
Note that as . Hence, we have for and some constant . Obviously, .
Then, from (
13), we have
, for
, where
, and
. By analogy, we have
, for
, where
and
for
. Then, we have
, where
and, obviously,
. Then we have
. □
Thus far, it is shown in Case B that all
are strictly smaller than the Lyapunov function
, i.e.,
for
and
, if
or
for at least one leader
or a neighbor agent
such that
. It should be noted that
is a bounded and finite constant. Specially, if
, there is only one valid state variable
, which means that there is no need to consider the convergence process similar to Case A. Similar to Case B, from (
15) we can also easily deduce that
for some constant
.
Theorem 1. Under Assumptions 1–3, the multi-agent system (1) with (3) can achieve containment control, i.e., for all . Proof. Under Assumption 3, during some subinterval of each time interval , there is an agent such that . From Cases A and B, it follows that for some finite constant and . Similarly, from Assumption 3, during some subinterval of the time instant , there must exist another agent such that either or . From Cases A and B, we have and for some finite constants , and .
By analogy, we have for some finite constant , and all . Thus, there must be a constant such that for all possible , as all possible are finite. As a result, for a positive integer . Then, we have , implying that .
4. Numerical Simulation Results
Consider an MAS consisting of 8 heterogeneous agents for
and 4 leaders, where
are second-order agents and
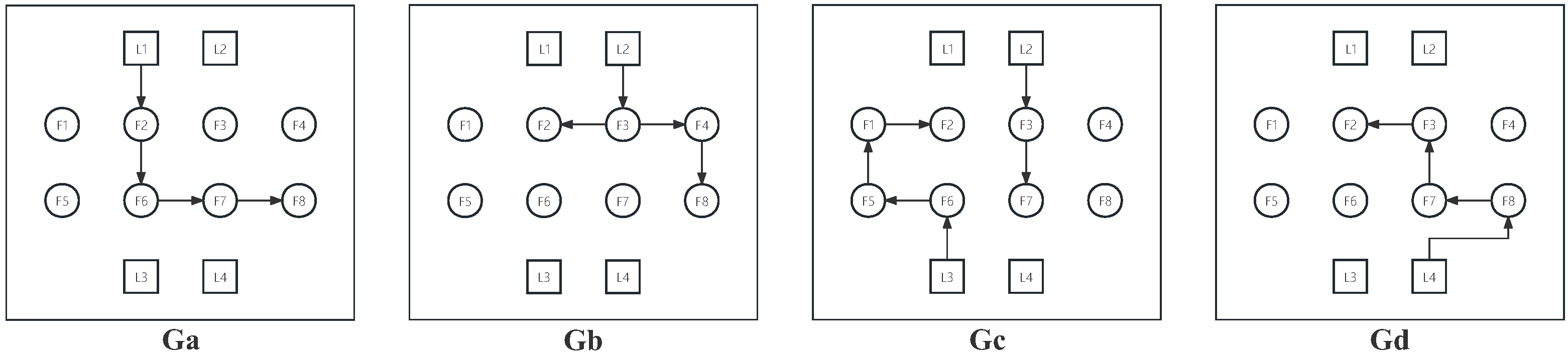
are third-order agents. As is shown in
Figure 1, the topologies of this MAS keep switching in the four graphs
and their communication delays are, respectively, 0.5 s, 0.5 s, 1 s, 1 s, and, obviously,
s, where Assumption 3 is satisfied with
and
. According to Assumption 2 and Equation (
6), let
,
for second-order agents
, and
,
, and
for third-order agents
, and
. Then the parameters of control input are chosen as
,
,
if
, and
if
for all
. The control input constraint set of each agent is considered as
respectively, where
and
. Obviously, Assumptions 1 and 2 are also satisfied.
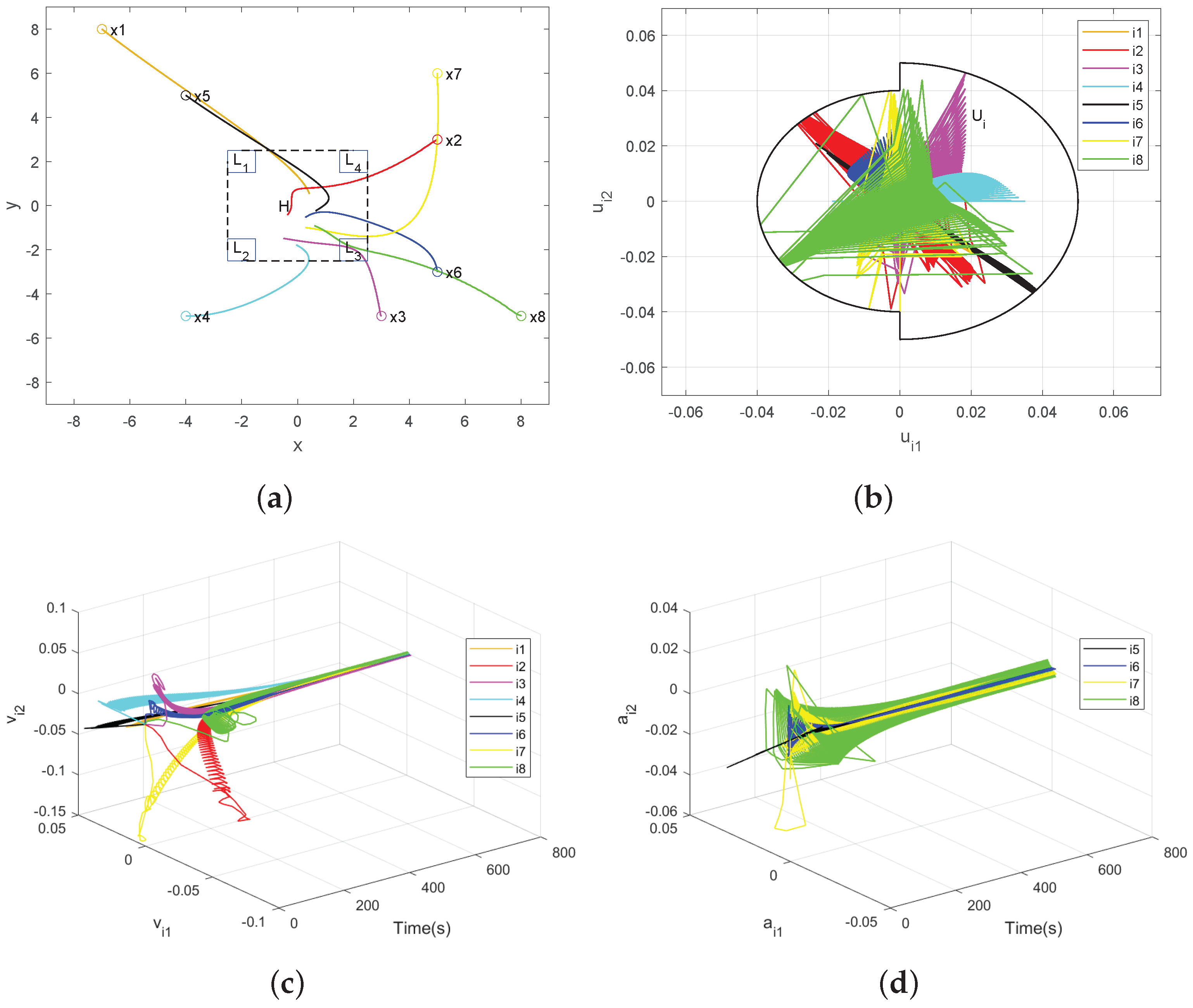
Figure 2a–d depict the simulation results of system (
1) employing algorithm (
3).
Figure 2a shows the position trajectories, i.e., first-order states
of all agents.
Figure 2b shows the control inputs
of all agents and they are constrained in the control input constraint set
.
Figure 2c shows the second-order states
of all agents with time evolution, and
Figure 2d shows the third-order states
of all agents with time evolution. Note that
are second-order agents and, thus, no corresponding trajectories of third-order state appear in
Figure 2d. It is evident that the presence of control input constraints, as shown in
Figure 2b, imposes limitations on the control algorithm of each agent, preventing it from arbitrarily reaching desired values and desired convergence rate of the original unconstrained control input. As is shown in
Figure 2a–d, each agent is eventually driven into the convex hull
H spanned by the leaders
over time, which aligns with the findings of Theorem 1.


{kind=link}
{kind=link}