1. Introduction
Quantifying human motion through high-fidelity, marker-based motion-capture recordings remains pivotal for robotics, because these precise trajectories provide the kinematic ground truth required to model, predict, and replicate human movement across diverse tasks [
1]. Anchoring control policies to accurate spatiotemporal data enables manipulators and social robots to navigate safely around people, while wearable exoskeletons can synchronize assistive torques with a user’s intent in real time. Large-scale motion libraries further power AI algorithms that synthesize realistic behaviors in virtual avatars, humanoid robots, and adaptive exoskeletons [
2], thereby advancing metaverse interfaces and reinforcement-learning-based gait assistance [
3]. In short, the continuing progress of modern robotics is strongly supported by the same high-precision, marker-based motion-capture datasets that furnish reliable ground truth for modeling and replicating human movement [
1].
While marker-based motion-capture data provide the most important foundation for quantifying human movement, their limited availability makes data augmentation increasingly necessary [
4]. Although this technique remains one of the most accurate ways to record motion, setting up the capture environment is expensive, and each session demands considerable time and skilled personnel. These constraints restrict the large-scale datasets that most AI methods still assume. The shortage is especially severe for uncommon or highly specialized movements that rarely appear in public repositories. These gaps hinder AI applications for specialized movements in wearable robot design [
5], sports science [
6], and AI-based motion prediction [
7,
8]. Augmentation techniques offer a practical way to enlarge small recordings without further capture sessions [
9,
10]. In short, because marker-based motion-capture data are both essential and scarce, augmenting limited, specialized datasets remains a pivotal step for advancing human-motion research.
As generative models have advanced, extensive research has been conducted to apply these techniques to motion-capture data, though most studies have focused on generating motions based on large-scale datasets. While these approaches have made significant contributions to producing high-quality human motions, they are not well-suited for augmenting specialized movements that cannot be obtained from public datasets, where researchers must collect their own limited samples for specific applications. Various fields, particularly biomechanics, have successfully applied generative models to address the challenges of motion-capture data acquisition, but these studies have primarily concentrated on fidelity while offering limited consideration of diversity in generated motions. Furthermore, these attempts have either not employed techniques tailored for few-shot learning or have lacked a comprehensive analyses of how these techniques affect the fidelity and diversity of generated motions and what their optimal application is. This limitation poses a significant challenge for augmenting marker-based datasets representing specific motions not included in open datasets, where collecting large amounts of data is impractical.
One of the challenging aspects of few-shot learning research for motion-capture data is that there are no optimized metrics for evaluating generated motion data from small motion-capture datasets. Evaluating generative models presents unique challenges compared to supervised learning tasks due to the absence of ground truth labels. Metrics like accuracy are unsuitable for quantitative assessment in such scenarios. In image generation research, this issue has been addressed through alternative evaluation methods like the Fréchet Inception Distance (FID) [
11]. FID measures the similarity between distributions of real and generated images by extracting high-level features using a pretrained Inception v3 model, and it has been widely used as an indicator of fidelity and diversity. While FID has also been applied to evaluate generative models for motion synthesis, it has limitations when dealing with small sample sizes due to its reliance on normality assumptions and instability under such conditions. These limitations are particularly relevant when augmenting motion-capture datasets with limited original samples.
Alternative metrics such as Kernel Inception Distance (KID) [
12] have been proposed to address FID’s instability with small datasets. Unlike FID, KID employs an unbiased estimator that remains stable even when working with limited samples, making it potentially more suitable for few-shot learning scenarios. However, KID still relies on the Inception model for feature extraction, which presents fundamental limitations when evaluating motion data. The Inception architecture was specifically designed and pretrained for image classification tasks, making it inherently unsuitable for capturing the temporal dynamics, biomechanical constraints, and kinematic relationships that characterize human motion. This architectural mismatch means that even with improved statistical stability, KID may not effectively capture the semantic quality and diversity of generated motion sequences, highlighting the need for motion-specific evaluation frameworks.
This study aims to analyze how few-shot learning techniques can be applied to motion data augmentation using generative models for uncommon and specialized motions and how these techniques can improve the fidelity and diversity of generated data. To our knowledge, this is the first study to systematically analyze the effects of few-shot learning techniques on the fidelity and diversity of generated data in marker-based motion-capture dataset augmentation using generative models and to determine the optimal application methods. To achieve this objective, we propose two key strategies: first, we apply transfer learning and Elastic Weight Consolidation (EWC), a continual learning technique, to motion-capture data augmentation; second, we introduce Motion Feature-Based Maximum Mean Discrepancy (MFMMD), which is well-suited for evaluating distributional distances between small-scale motion-capture datasets, and we use it to assess the quality of generated data.
In summary, this study makes several key contributions:
Few-Shot Learning Framework for Motion Data Augmentation: We introduce the first systematic approach that applies few-shot learning techniques, specifically transfer learning and Elastic Weight Consolidation (EWC), to motion-capture data augmentation for uncommon and specialized motions, addressing the diversity constraints encountered with extremely limited dataset sizes.
Comprehensive Analysis of Fidelity–Diversity Trade-Offs: To our knowledge, this is the first study to systematically analyze how few-shot learning techniques affect both the fidelity and diversity of generated data in marker-based motion-capture dataset augmentation, providing insights into optimal application methods for generative models.
Motion Feature-Based Maximum Mean Discrepancy (MFMMD): We propose MFMMD as a novel evaluation metric specifically designed to assess semantic similarity between original and generated motion datasets effectively. Unlike existing metrics such as FID and KID, MFMMD remains stable even with limited samples by leveraging Maximum Mean Discrepancy combined with a motion-specific feature extractor, addressing the fundamental limitations of inception-based metrics for motion data evaluation.
3. Materials and Methods
3.1. Datasets
In our study, we employ the AMASS dataset [
24], which unifies multiple motion-capture collections under a common skeletal representation. AMASS comprises data from 500 subjects, totaling 3722 min and 17,916 motion sequences. For pretraining, we utilize the full AMASS corpus except for the HDM05 subset. HDM05 is itself included within AMASS but contains unique motions not found elsewhere in AMASS. During fine-tuning, we isolate HDM05 and focus on three specific motion categories: badminton (10 sequences), locomotion with weights (9 sequences), and kicking and punching (11 sequences) [
25]. These represent unique motion types with limited occurrences in the AMASS collection. By training on these 30 sequences across diverse but sparse motion categories, we simulate a limited-data scenario and highlight the challenges of generating realistic specialized motions with minimal samples.
3.2. Data Processing
We used motion-capture data in the Skinned Multi-Person Linear (SMPL) format [
26], which is the standard skeletal representation adopted by the AMASS dataset. We excluded 3D translation coordinates, hand joints, and facial expressions, as these aspects were beyond the scope of our research. To leverage the success of GAN models in image generation, we transformed the motion sequences into a single RGB image format—referred to as a pseudo-image [
14,
27]—as shown in
Figure 1.
The complete motion sequence
is arranged as
where
T denotes the number of time frames, and
J denotes the number of joints. Each row is defined by
concatenating the axis–angle vectors
for all joints at frame
t. Accordingly,
encodes the joint-angle data for frame
t. The superscript ⊺ denotes the vector transpose operator, ensuring that each
is treated as a row vector when concatenated.
This
is converted into a pseudo-image tensor
by reshaping and reassigning channels so that
Each pixel in the pseudo-image represents a normalized component
of the transposed motion vector
. The first dimension
c encodes the channel (R, G, and B) obtained from the three axis–angle components, the second dimension corresponds to the temporal index
t, and the third dimension maps to the joint index
j. This configuration enables the convolutional layers to learn temporal dynamics along the frame axis while simultaneously capturing spatial correlations across joints within the motion data.
However, converting T frames into an image inevitably subsamples the temporal axis. Therefore, a lower pseudo-image resolution compresses more frames into each pixel row, increasing the chance of temporal detail loss. Smaller images (e.g., 128 × 128) boosted computational efficiency but caused noticeable motion degradation when sequences were reconstructed, whereas larger images preserved detail at the cost of higher memory and runtime. Pilot tests showed that resolutions below 256 × 256 produced motions that human evaluators judged as different actions, whereas 256 × 256 offered a balance—no severe perceptual loss yet appreciable savings over full-size rendering.
3.3. Elastic Weight Consolidation (EWC)
We introduce Elastic Weight Consolidation (EWC) to preserve source-domain diversity when fine-tuning a pretrained generator on a small motion-capture dataset. EWC was originally proposed for continual learning in classification models to alleviate the catastrophic forgetting that occurs when a neural network is trained sequentially on multiple datasets [
28]. Inspired by the observation that the brain maintains previously acquired knowledge by reducing the plasticity of synapses that are vital for earlier tasks, EWC constrains changes in parameters that were important for previous tasks, thereby sustaining performance on both old and new tasks [
28].
Beyond continual learning, EWC has also proven to be effective in transfer-based few-shot image generation, where it enables the production of diverse images from only a handful of samples [
29]. Achieving strong performance on a new domain without sacrificing knowledge of the original domain hinges on accurately estimating each parameter’s importance. EWC accomplishes this by leveraging Fisher information, which quantifies how much information a dataset carries about the parameters of a probability distribution [
28,
29].
Parameters with higher Fisher information are considered more important to the source task and therefore receive stronger regularization during fine-tuning. Because Fisher information equals the variance of the score function—the gradient of the log-likelihood—it can be estimated as
Here, denotes the Fisher information associated with parameter , and represents the log-likelihood of . The symbol refers to the i-th parameter of the generator pretrained on the source data. In this work, we approximate L by applying a sigmoid activation to the discriminator output, and x corresponds to synthetic pseudo-images produced by the generator.
The EWC loss
subsequently regulates each parameter during fine-tuning according to its Fisher information:
During fine-tuning, the pretrained parameter
remains fixed, and only the current parameter
is updated.
To compute Fisher information, we transform the discriminator’s raw logits via a sigmoid activation. This mapping yields probabilistic outputs that represent the likelihood that a motion frame x originates from the generator’s distribution. The resulting Bernoulli likelihood ensures that the score function is derived from a valid probability model, thereby fulfilling the theoretical requirement for Fisher information.
Because the motion sequences are converted into pseudo-image form, they remain continuous and highly structured. The discriminator—already trained to separate real from synthetic trajectories—captures both temporal coherence and inter-joint correlations. Leveraging its sigmoid-based likelihood therefore provides a principled and sensitive weighting scheme when estimating how each generator parameter influences the probability of observing a specific motion sample.
3.4. Generative Model Implementation Details
For the data augmentation phase, we incorporate both adversarial loss and EWC loss to enhance diversity and preserve fidelity with limited data. Since we employ a Wasserstein GAN with a gradient penalty (WGAN-GP) framework, the adversarial component is based on Wasserstein loss. Pretraining was performed for 100 epochs with a batch size of 128 and a learning rate of 0.0001 using the Adam optimizer. Fine-tuning then proceeded for 10,000 epochs with a batch size of 10, maintaining the same learning rate and optimizer settings. To balance temporal resolution and computational efficiency, the motion-capture sequences were processed at 256 × 256 pixel resolution.
Pretraining was carried out on eight NVIDIA Tesla V100 cards. (NVIDIA Corporation, Santa Clara, CA, USA). Using approximately 18,000 motion sequence samples, 100 epochs required 17 h. Fine-tuning was executed on a single NVIDIA RTX 3090 (NVIDIA Corporation, Santa Clara, CA, USA). Optimizing the network for 10,000 epochs on 10 motion sequence samples completed in 8 h.
The total loss used in this study consists of adversarial loss and EWC loss, combined with a weight as shown in (
7).
represents adversarial loss, while
denotes EWC loss, which is designed to enhance diversity by retaining pretrained features in the source data. The term
is the weighting factor that balances the contributions of adversarial loss and EWC loss during the training process.
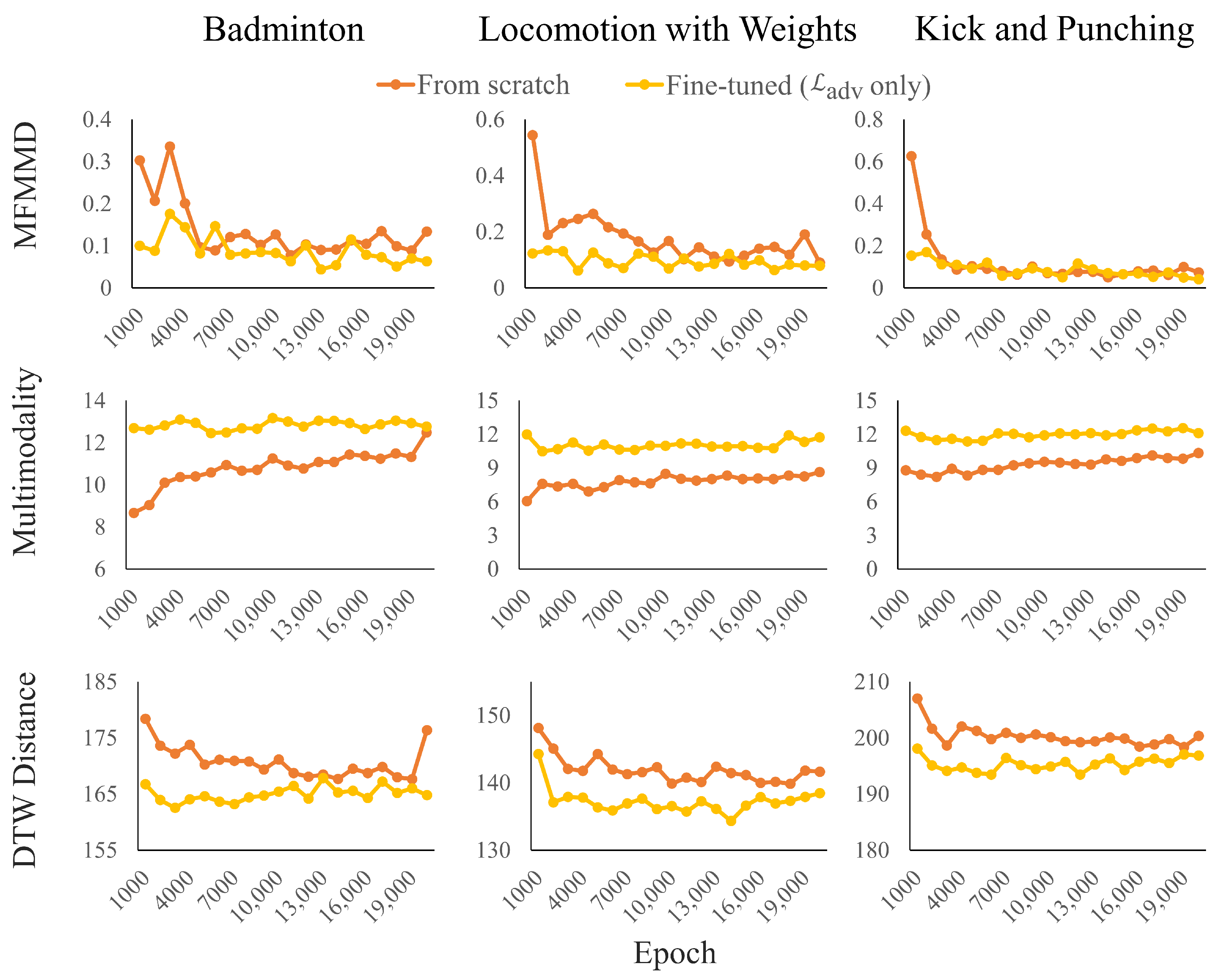
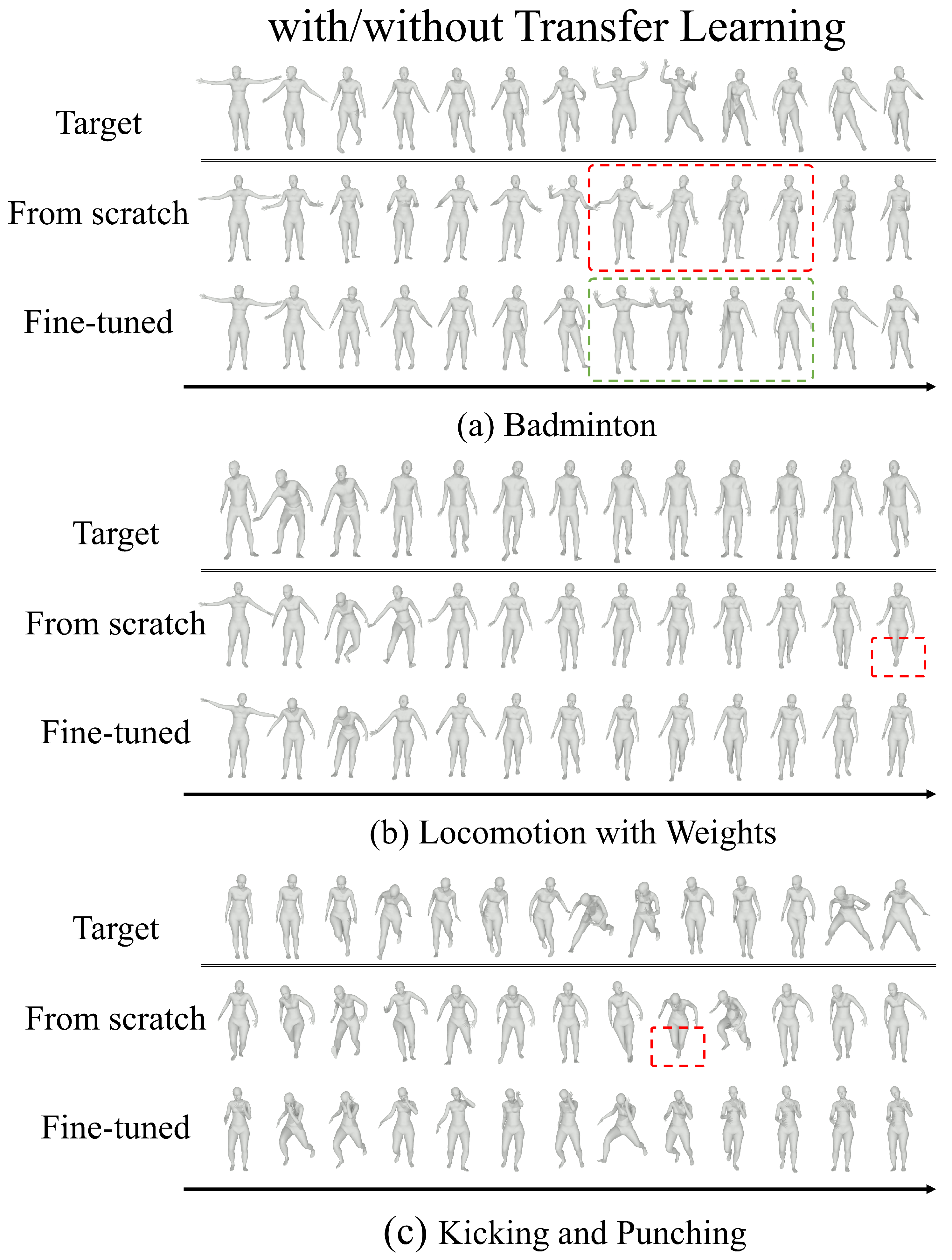
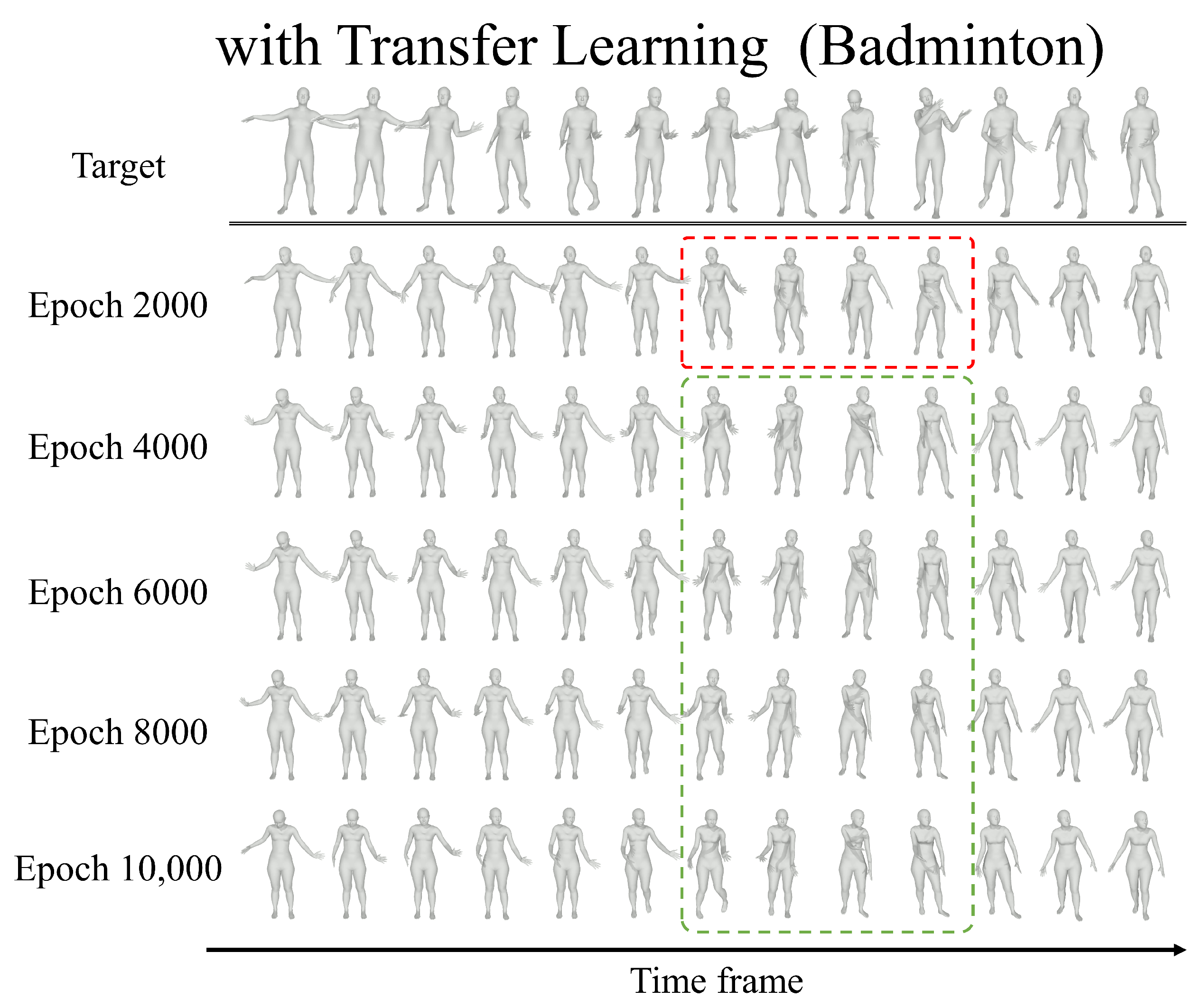
To assess the impact of transfer learning on the diversity of generated motion data, we compared two setups on a target dataset of 10 sequences: (1) a model trained from scratch using only adversarial loss and (2) a model pretrained on a source dataset of approximately 17,000 sequences and then fine-tuned using only adversarial loss. Furthermore, to evaluate the effect of EWC loss on motion diversity, we compared the adversarial-only transfer model with transfer models incorporating EWC loss at varying weights ( = 500; 5000; 50,000; and 500,000).
3.5. Framework
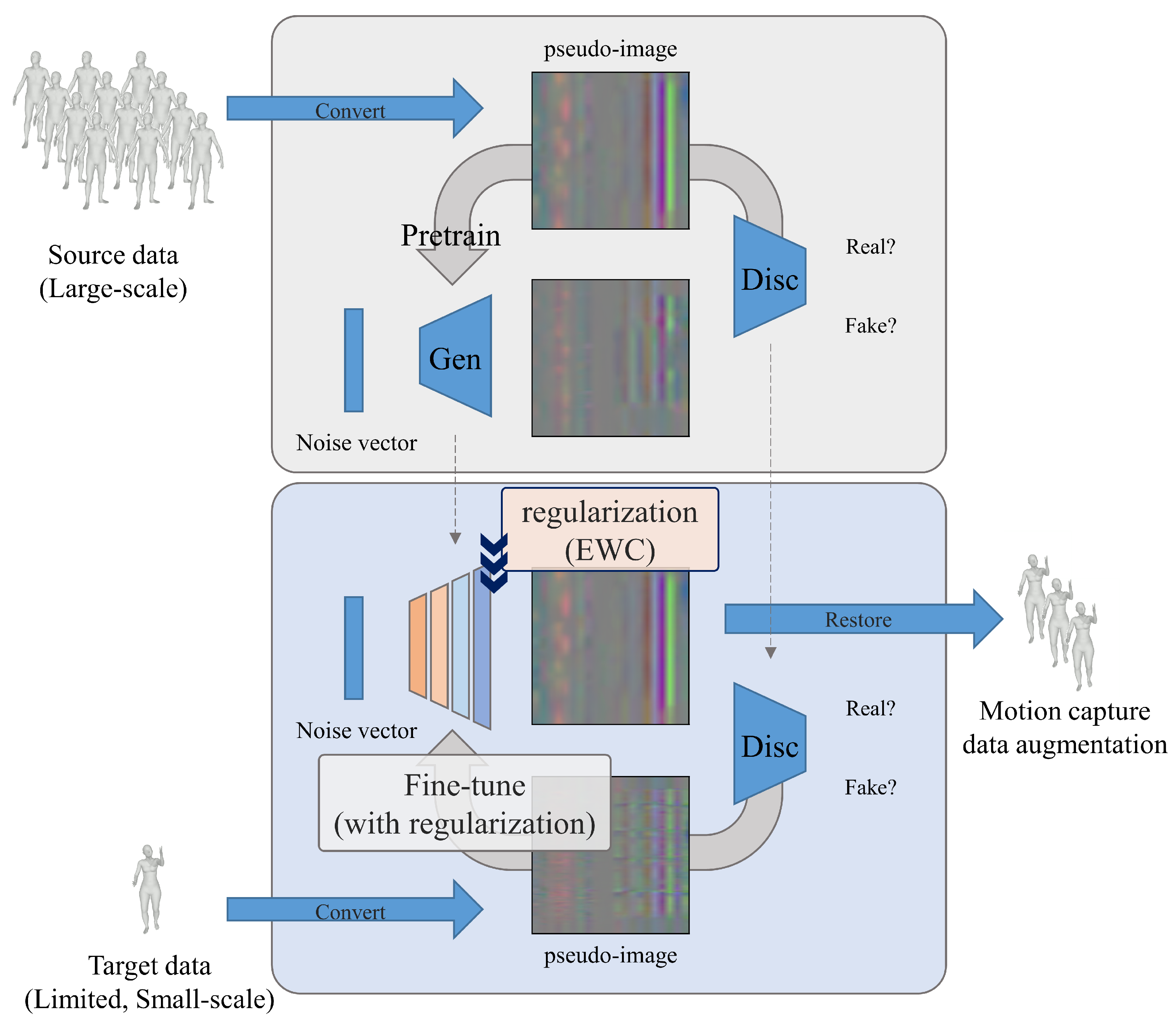
Figure 2 illustrates our proposed comprehensive framework for diverse motion augmentation under data scarcity conditions. The framework employs a two-stage transfer learning approach that leverages knowledge from large-scale source datasets to enhance the quality and diversity of generated motions when fine-tuning on extremely limited target datasets.
The framework begins with a pretraining phase where the generator learns fundamental human-motion patterns from a comprehensive source dataset containing diverse movement types. This pretraining stage enables the model to acquire rich representations of general human-motion dynamics, kinematic constraints, and anatomical relationships that serve as a robust foundation for subsequent specialization. The generator, implemented as a WGAN-GP architecture, learns to map random noise vectors to realistic motion sequences represented in pseudo-image format, capturing both spatial joint correlations and temporal motion patterns.
During the fine-tuning phase, the pretrained generator is adapted to the target domain containing only a handful of specialized motion sequences. To address the critical challenge of maintaining diversity while adapting to the limited target data, we introduce Elastic Weight Consolidation (EWC) as a regularization mechanism. The EWC regularizer strategically preserves the knowledge encoded in the pretrained model by constraining parameter updates based on their importance to the source task, as quantified by Fisher information values.
The Fisher information serves as a principled measure of parameter importance, with higher values indicating parameters that are more critical to the pretrained model’s performance on the source domain. During fine-tuning, parameters with high Fisher information values receive stronger regularization constraints, preventing them from deviating significantly from their pretrained values. This selective constraint mechanism allows the model to adapt to the target domain while retaining the diverse motion patterns learned during pretraining.
The framework’s effectiveness stems from its ability to balance two competing objectives: adaptation to the target domain and preservation of source domain diversity. By applying EWC regularization, the model can effectively leverage the rich variability present in the large-scale source dataset while gradually adapting to the specific characteristics of the target motions. This approach proves particularly beneficial in few-shot learning scenarios where traditional fine-tuning approaches often suffer from overfitting and catastrophic forgetting, leading to reduced diversity in generated motions.
The complete loss function integrates both adversarial training objectives and EWC regularization, with the regularization strength controlled by the hyperparameter . This design enables fine-grained control over the trade-off between target domain adaptation and source domain knowledge preservation, allowing practitioners to adjust the framework’s behavior based on specific application requirements and the degree of specialization needed for the target motions.
3.6. Evaluation
In this study, we evaluated the quality of the generated motion data using two metrics: motion feature-based MMD and multimodality. The motion feature-based MMD and multimodality were computed using a Fully Convolutional Network (FCN)-based action classifier as a feature extractor. The details of each evaluation metric and the feature extractor are described below.
3.6.1. Feature Extractor
To compute motion feature-based MMD and multimodality, a feature vector must be extracted from the motion data. Since there is no standardized motion feature extractor, we employed an FCN-based action classifier, which has demonstrated strong performance in time-series classification [
30]. While FCN represents a simple yet powerful framework for time-series data classification, its convolutional architecture inherently focuses on local feature patterns due to the nature of convolution operations. This characteristic may potentially limit the model’s ability to capture long-term temporal dependencies that span extended time horizons within motion sequences.
However, this limitation is mitigated in the context of human-motion recognition, where the most critical information for accurate motion understanding typically resides in the changes and patterns occurring within temporally adjacent frames. Fundamental biomechanical principles suggest that the most discriminative features for motion classification emerge from local temporal variations, such as joint velocity changes, and short-term coordination patterns. Consequently, the FCN’s emphasis on local temporal relationships aligns well with the inherent characteristics of human-motion data, making its potential limitations as a feature extractor for motion-capture sequences relatively constrained. This alignment between FCN’s architectural strengths and the temporal structure of human-motion data supports its effectiveness as a feature extraction mechanism for our evaluation framework.
3.6.2. Motion Feature-Based MMD
To estimate the distributional distance between the limited original motion data and the generated data, we employed a novel evaluation metric, motion feature-based MMD, which is derived from the Maximum Mean Discrepancy (MMD) [
31]. While the Fréchet Inception Distance (FID) [
15,
20,
32] has been widely used in prior studies, it is known to be unstable with respect to small sample sizes and requires a normality assumption [
33]. Given the constraints of our study, MMD was chosen as a more suitable metric for evaluating the distribution of small-scale motion datasets.
For MFMMD, we applied a multi-scale Gaussian kernel to the extracted motion features
. Let
represent the motion feature set of real data and
denote the motion feature set of generated data. The motion feature-based MMD is formulated as follows:
where the multi-scale Gaussian kernel is defined as
Here,
M represents the number of kernels, and
denotes the bandwidth of each kernel.
In this study, we generated 1000 samples for each of the 10 real motion data sequences and calculated the MFMMD. The experiment was repeated 20 times. Additionally, the MFMMD values were multiplied by 1000 for easier readability.
3.6.3. Multimodality
To evaluate the diversity of motion data generated by our augmentation method, we also calculated a metric called multimodality [
15,
20,
34]. Since the primary objective of this research is to enhance the diversity of generated motion data, higher multimodality values are considered desirable. Multimodality was calculated as the average distance across all combinations of motion features
and
from two sets of samples generated by the model. Each set contained
samples. Similarly to the MFMMD evaluation, we generated 1000 samples per set (
) and repeated the experiment 20 times.
3.6.4. Dynamic Time Warping Distance
To provide a more intuitive fidelity measure that captures temporal alignment quality, we incorporated the Dynamic Time-Warping (DTW) distance [
35] into our evaluation protocol. DTW distance offers a complementary perspective to MFMMD by explicitly measuring how well generated motion sequences preserve the temporal dynamics of the original data, making it particularly suitable for evaluating motion-capture data where temporal coherence is crucial.
To compute this metric, we first align each generated motion sequence with its corresponding ground-truth sequence using the DTW algorithm. The DTW algorithm finds the optimal alignment between two time series by allowing for temporal distortions while preserving the overall shape and order of the sequences. We then sum the DTW distances of all joint-angle trajectories within each sequence pair and average this value over every valid pair in the dataset. This approach provides a comprehensive assessment of temporal fidelity across all degrees of freedom in the skeletal representation.
The DTW distance is particularly valuable in our evaluation framework because it explicitly compensates for temporal shifts and variations in sequence timing that may occur during the generation process. Unlike point-to-point distance measures that require strict temporal correspondence, DTW offers a robust estimate of how closely the generated motions follow the original temporal patterns while allowing for natural variations in timing. This characteristic makes the DTW distance especially relevant for motion-capture data evaluation, where maintaining the natural flow and rhythm of human movement is essential for realistic augmentation.
3.6.5. Monte Carlo-Based Sensitivity Analysis for Hyperparameter Optimization
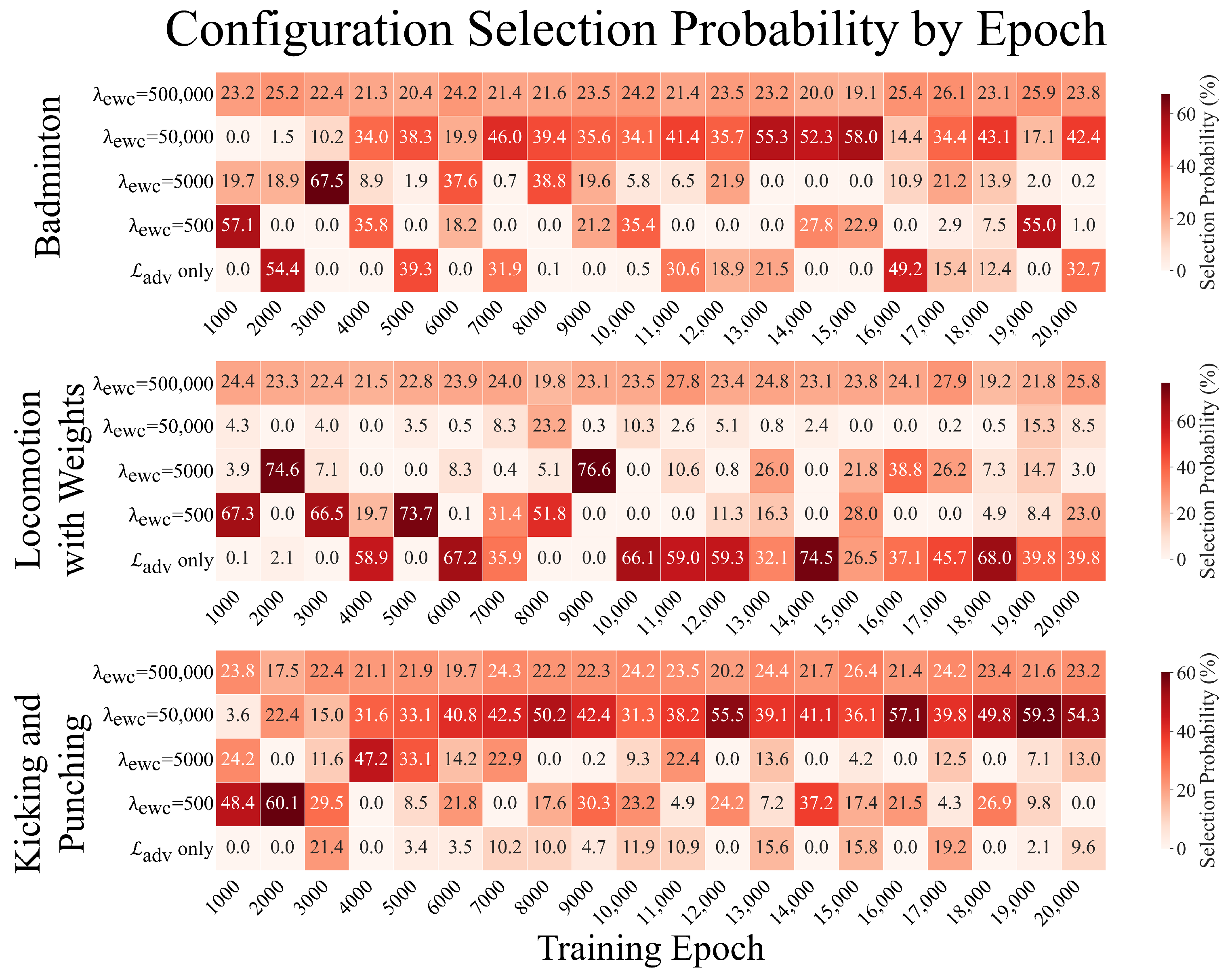
To systematically evaluate the robustness of our optimization and assess the stability of our findings across different weighting schemes, we conducted a Monte Carlo-based sensitivity analysis. This approach quantifies how frequently each configuration emerges as optimal under randomly sampled weight combinations, providing insights into the reliability of our hyperparameter selection.
The sensitivity analysis proceeded through the following steps:
- 1.
Metric Standardization: For each training epoch, we standardized the three evaluation metrics (MFMMD, multimodality, and DTW) using Z-score normalization to ensure comparable scales across different measures.
- 2.
Direction Alignment: Since lower values are preferable for MFMMD and DTW distance while higher values are desirable for multimodality, we applied sign inversion to MFMMD and DTW scores:
- 3.
Random Weight Sampling: We generated 2000 weight combinations using a symmetric Dirichlet distribution, Dir(1,1,1), ensuring unbiased sampling across the 3-simplex where .
- 4.
Composite Score Calculation: For each weight combination
w and
configuration, we computed the following weighted sum:
- 5.
Optimal Configuration Identification: For each weight combination, we identified the configuration that achieved the highest composite score.
- 6.
Selection Probability Estimation: We calculated the proportion of weight combinations for which each configuration was selected as optimal, providing a robust measure of hyperparameter sensitivity.
5. Discussion
5.1. Research Objectives and Expected Outcomes
In this study, we investigate whether transfer learning and the Elastic Weight Consolidation (EWC) loss can enhance the diversity of motions generated by a generative adversarial network (GAN) trained on an extremely small set of motion-capture samples. Although the target dataset itself contains very few examples, we show that leveraging the diversity of a large source dataset and preserving its critical features via the EWC loss substantially increases the variability of the augmented target motions.
The Monte Carlo sensitivity analysis strongly supports = 50,000 as the optimal hyperparameter choice, demonstrating consistent superiority across diverse weighting schemes and training epochs. This probabilistic validation enhances the generalizability of our findings and provides practitioners with confidence in applying our methodology to their specific applications.
Our approach enables the augmentation of rare or hard-to-acquire motions—those not readily available in public datasets—by collecting only a handful of motion-capture sequences and synthesizing additional samples. This capability reduces the complexity, time, and labor required for extensive motion-capture campaigns while still producing a wide range of specialized actions.
As artificial intelligence continues to advance, both the size and diversity of training data remain core determinants of model performance. Marker-based motion capture is costly and resource-intensive, making it difficult to assemble large datasets, particularly for niche or proprietary motions. Although state-of-the-art AI methods in action recognition, motion prediction, and text-to-motion generation excel on movements included in their training sets, they struggle to generalize to unseen actions. Addressing the challenge of adding data for previously untrained motions is therefore crucial.
The techniques presented here not only improve the usability and performance of AI models that rely on motion-capture data but also generalize beyond the specific WGAN-GP framework used in our experiments. Transfer learning and EWC loss can be applied to a broad spectrum of generative models, suggesting that future adaptations may yield even higher quality and greater diversity in synthesized motion data.
5.2. Limitations
5.2.1. Transfer Learning Characteristics of Motion Versus Image Data
While augmenting a GAN’s adversarial loss with EWC loss increases the diversity of generated motions, it also tends to push the outputs away from the target distribution. Empirically, we observe an increase in MFMMD between generated and real target motions, and our qualitative evaluations confirm a semantic drift in the synthesized sequences.
We attribute this limitation to fundamental differences in how Fisher information is distributed across network parameters when modeling motion data versus image data. In convolutional image generators, early layers typically encode overall structure and style, whereas later layers capture fine details [
36].
Figure 11a shows that the average Fisher information per layer is substantially higher in the later layers of our motion generator. Consequently, the EWC penalty preserves these detail-oriented parameters during fine-tuning, forcing adaptation to occur primarily in the early layers that govern global motion patterns.
In image-based GANs enhanced with EWC loss, such as the model in [
29], this behavior proves advantageous for tasks like facial style transfer: The network maintains the essential facial structure (eyes, nose, and mouth) while adjusting style in the initial layers, thereby achieving both closeness to the target domain and increased diversity. By contrast, our motion-to-pseudo-image conversion (
Figure 11b) reveals that while global motion trajectories remain similar after fine-tuning, detailed joint movements deviate. Because the parameters responsible for these details are heavily constrained by high Fisher information, the model cannot adequately adapt them to the target domain. This constraint explains why, in our experiments, multimodality improves but MFMMD also increases.
5.2.2. Data-Quality Sensitivity
Because the target set typically contains fewer than a dozen sequences, even one low-quality sample (e.g., motion-tracking drift or occlusion) can disproportionately skew the learned distribution and degrade both fidelity and diversity. We caution that this risk necessitates strict preprocessing or outlier filtering, especially when only a handful of examples are available.
5.2.3. Dependence on Large-Scale Pretraining
Our approach presumes access to a closely related, high-volume source dataset for pretraining. Consequently, it is not applicable to domains where no comparable repository exists, such as specialized animal-motion capture. We explicitly note that the method cannot be transferred to those scenarios without first curating a sufficiently large surrogate corpus.
5.3. Future Works
5.3.1. Motion-Aware Fisher Information Estimation for Few-Shot Learning
Current Fisher information estimation relies on discriminator outputs designed for pseudo-image representations, which may not effectively capture the biomechanical constraints and temporal dependencies inherent in human motion. Future research should develop motion-aware Fisher information estimators that account for joint hierarchies, kinematic chains, and anatomical constraints specific to human movement.
Advanced approaches could incorporate skeletal topology awareness into Fisher information computation, weighting parameters based on their influence on biomechanically critical joints (e.g., spine, pelvis) versus peripheral joints. This motion-specific parameter importance assessment could significantly improve diversity preservation during few-shot fine-tuning by ensuring that anatomically meaningful motion patterns are retained from the source domain.
5.3.2. Adaptive Regularization for Motion-Capture Data Scarcity
The fixed weighting approach presents limitations when target datasets exhibit varying degrees of motion complexity and diversity. Future work should investigate adaptive regularization schemes that automatically adjust the EWC strength based on target dataset characteristics, such as motion complexity, joint coordination patterns, and temporal variability.
Motion complexity metrics could guide regularization strength selection, with simpler repetitive motions (e.g., walking cycles) requiring stronger regularization to prevent overfitting, while complex multi-joint coordination tasks (e.g., sports movements) benefiting from reduced constraints to allow adaptation. This approach would eliminate the need for manual hyperparameter tuning and provide more robust augmentation across diverse motion-capture scenarios.
5.3.3. Hierarchical Motion Representation for Few-Shot Transfer
Current pseudo-image representations may lose critical hierarchical relationships between body segments that are essential for realistic motion generation. Future research should explore hierarchical motion encodings that explicitly preserve joint parent–child relationships and kinematic dependencies during few-shot learning.
Multi-scale temporal modeling could address the challenge of capturing both local joint movements and global coordination patterns within limited sample scenarios. This approach would involve developing specialized architectures that process motion data at multiple temporal resolutions, enabling effective transfer of both fine-grained joint dynamics and overall movement strategies from source to target domains.
5.3.4. Motion-Capture Quality Assessment and Data Curation
Given the extreme sensitivity of few-shot learning to data quality, future work should develop automated quality assessment frameworks specifically designed for motion-capture data curation in augmentation pipelines. These systems would detect and filter problematic sequences (marker drift, occlusions, and anatomical violations) before they contaminate the limited target datasets.
Biomechanical plausibility scoring could be integrated into the data preprocessing pipeline, ensuring that only physiologically realistic motion sequences are used for few-shot learning. This quality assurance mechanism becomes critical when working with specialized motions where even a single corrupted sequence can significantly impact augmentation performance.
5.3.5. Cross-Domain Motion Transfer for Specialized Applications
The methodology’s applicability to cross-domain motion transfer presents significant opportunities for specialized applications where direct motion capture is challenging or impossible. Future research should investigate transfer learning approaches that bridge different motion-capture modalities (e.g., optical to inertial sensor data) or adapt motions across different subject populations (e.g., able-bodied to impaired movement patterns).
Domain-specific adaptation techniques could enable the augmentation of highly specialized motion datasets in fields such as rehabilitation robotics, occupational ergonomics, and adaptive prosthetics, where collecting large-scale training data is particularly challenging due to ethical constraints and participant availability.
5.3.6. Evaluation Metrics for Few-Shot Motion Augmentation
The development of motion-specific evaluation frameworks tailored for few-shot learning scenarios represents a critical research direction. Current metrics may not adequately capture the nuanced requirements of motion augmentation, particularly regarding the preservation of biomechanical constraints and the assessment of motion diversity in extremely limited sample settings.
Future work should establish standardized benchmarking protocols for few-shot motion augmentation that incorporate biomechanical validity assessments, temporal coherence measures, and diversity quantification specifically designed for motion-capture data. These comprehensive evaluation frameworks would enable more reliable comparisons of augmentation techniques and facilitate the development of improved methods for specialized motion synthesis applications.
6. Conclusions
In this work, we demonstrated that combining transfer learning with Elastic Weight Consolidation (EWC) substantially enhances the diversity of motion-capture data generated by a GAN trained on very limited samples. Although the pretrained model yields lower MFMMD and higher multimodality than a from-scratch counterpart, the addition of EWC introduces a trade-off, modestly increasing the distance from the target distribution. Our Fisher information analysis reveals that detail-oriented parameters in later layers are heavily constrained by EWC, limiting the model’s ability to adapt fine movements. To address these challenges, we propose future directions, including fixed-length motion patches, transformer-based generators, diffusion-model frameworks augmented with regularization techniques like EWC, and the application of pretrained motion classifiers with likelihood functions to estimate Fisher information more accurately. Collectively, our findings provide a promising foundation for generating diverse, high-quality motion data from few samples and point toward tailored few-shot learning strategies for motion capture.




 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}