
Real Reactive Micropolar Spherically Symmetric Fluid Flow and Thermal Explosion: Modelling and Existence


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
Nomenclature
- is mass density, and is the initial mass density;
- is velocity, and is the initial velocity;
- is pressure;
- is microrotational velocity, and is the initial microrotational velocity;
- is absolute temperature, and is the initial absolute temperature;
- is the concentration of unburned fuel, and is the initial concentration of unburned fuel;
- is the function connecting Eulerian spatial coordinate r and mass Lagrangian spatial coordinate x, and the value of r at the initial moment;
- is a constant that appeared during conversion from Eulerian to Lagrangian coordinates;
- is the second viscosity coefficient;
- is the dynamic Newtonian viscosity;
- is the dynamic microrotation viscosity;
- and are the coefficients of angular viscosities;
- is the microinertia coefficient;
- is the specific heat at constant volume;
- is the heat conductivity coefficient;
- is the species diffusion coefficient;
- is the reaction rate;
- is the intensity of the chemical reaction;
- C, are generic positive constants;
- n determines the dimension of the finite-dimensional space from which approximations , are constructed.
2. Modelling
2.1. Real Reactive Micropolar Fluid
- The stress tensor is given bywhere , , , and are coefficients of microviscosity. Notice that is not symmetric like in the classical case.
- Due to non-symmetry of the stress tensor, the law of conservation of the angular momentum equation is not implied by the conservation of mass and momentum and needs to be added to the model.where is microinertia density and is the coupled stress tensor.is the axial vector, and is body coupled density.
- The updated law of conservation of energy reads
- The reaction dynamics equation iswith diffusion coefficient , and the intensity of the chemical reaction iswhere is bounded on each set of the form , continuous with respect to , globally Lipschitz continuous with respect to and z, and .
- The updated law of conservation of energy readswith the reaction rate .
2.2. Spherical Symmetry
3. Local Existence Theorem
- Construct a sequence of approximations of the solution using the Faedo–Galerkin method
- Derive a priori estimates for approximate solutions.
- Using a priori estimates, prove that there exists a small enough time interval on which the sequence of approximate solutions is well defined and bounded.
- Using compactness theorems, conclude that there exists a (strongly/weakly/weakly*) convergent subsequence in certain functional spaces.
- The limit of the convergent subsequence is the solution to the problem.
4. Approximate Problem
5. Proof of Local Existence
- are positive constants that may depend on the initial data but do not depend on n. They take on different values at different places.
- is the standard norm in the space X or (it is clear from the context).
- .
- , .
5.1. Estimates for Approximate Solutions
- :
Estimates for Derivatives of Approximate Solutions
5.2. Proof of Theorem 1
- 1.
- is bounded in , , and ; is bounded in .
- 2.
- is bounded in , , and .
- 3.
- , , , and are bounded in , , and .
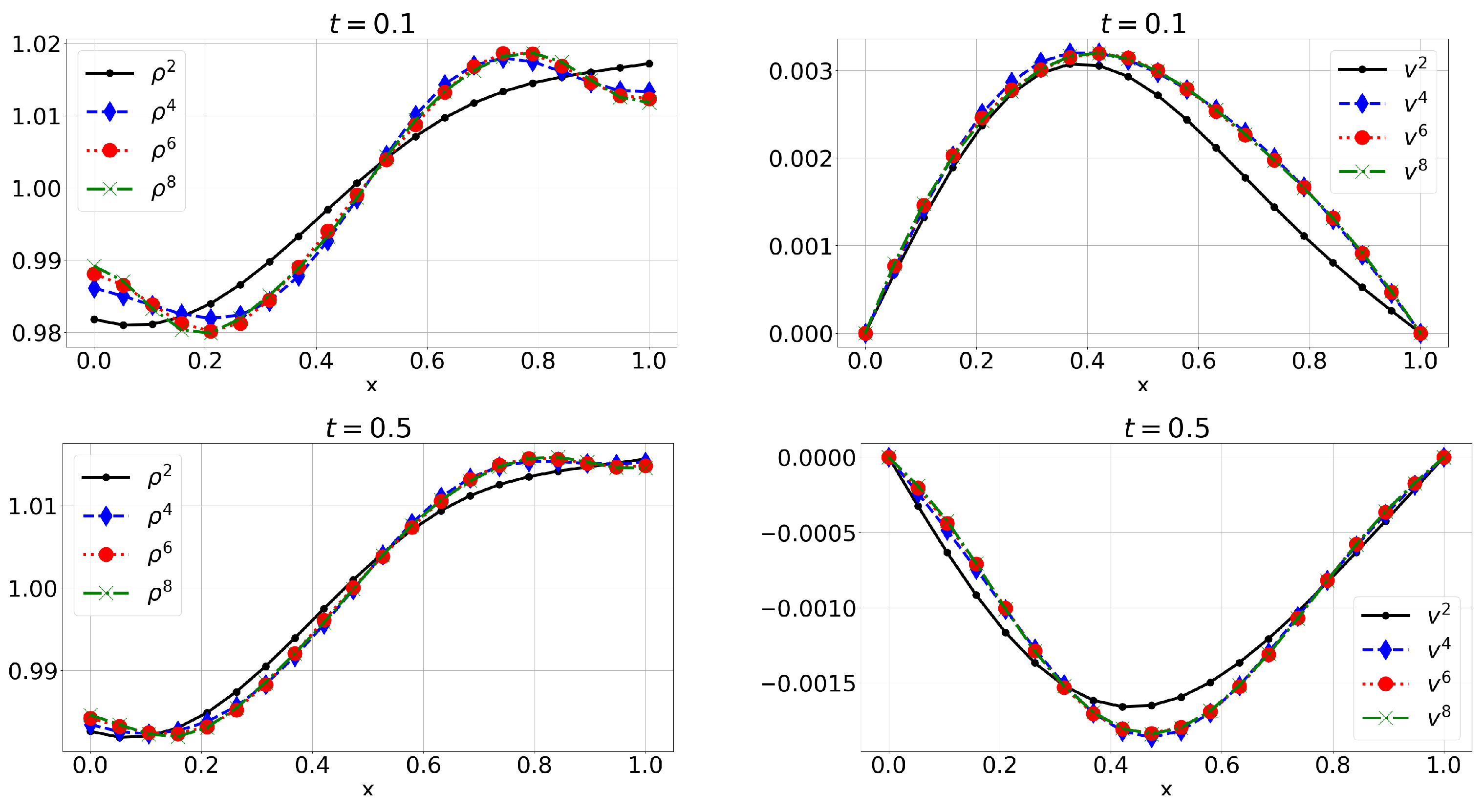
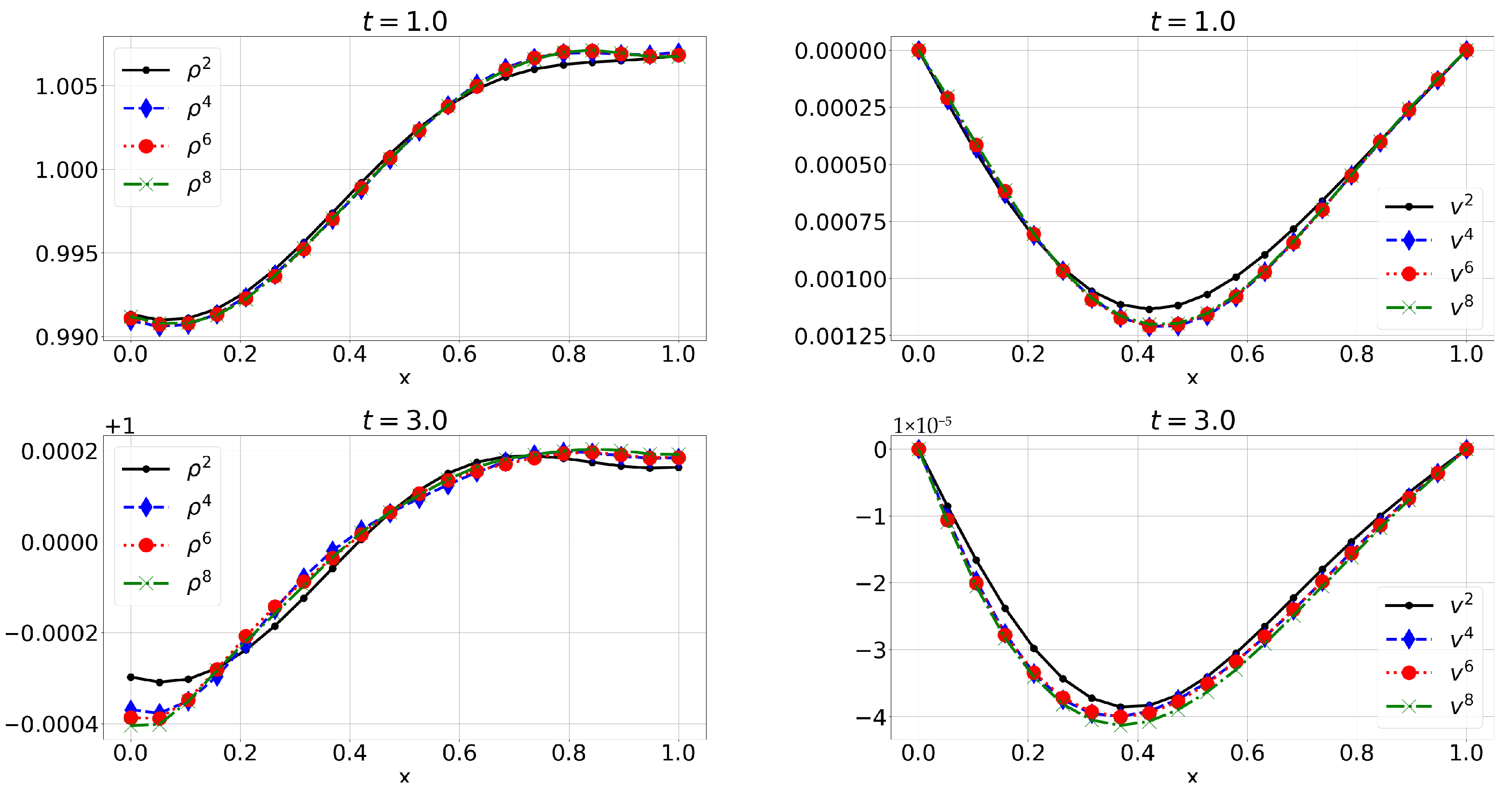
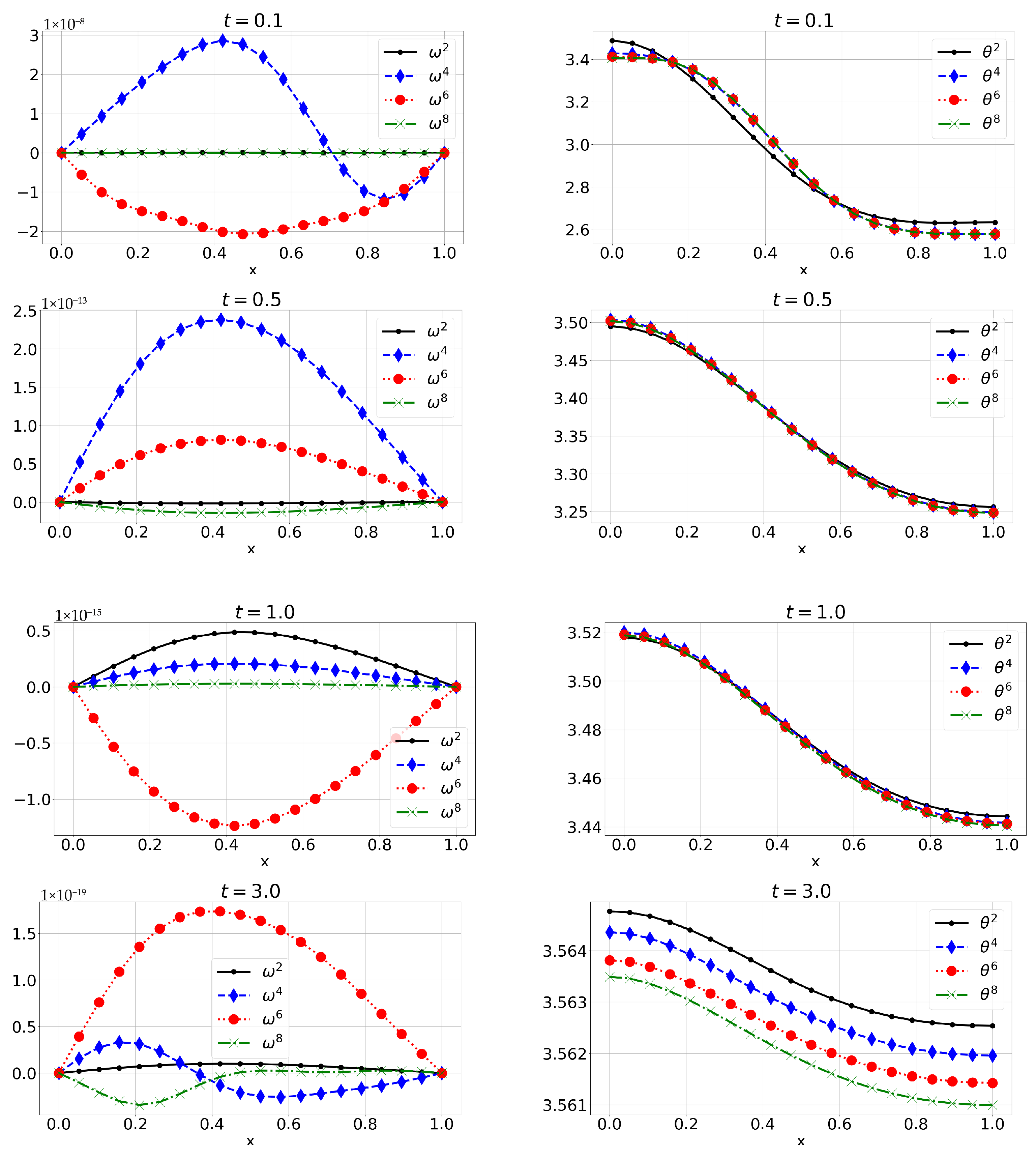
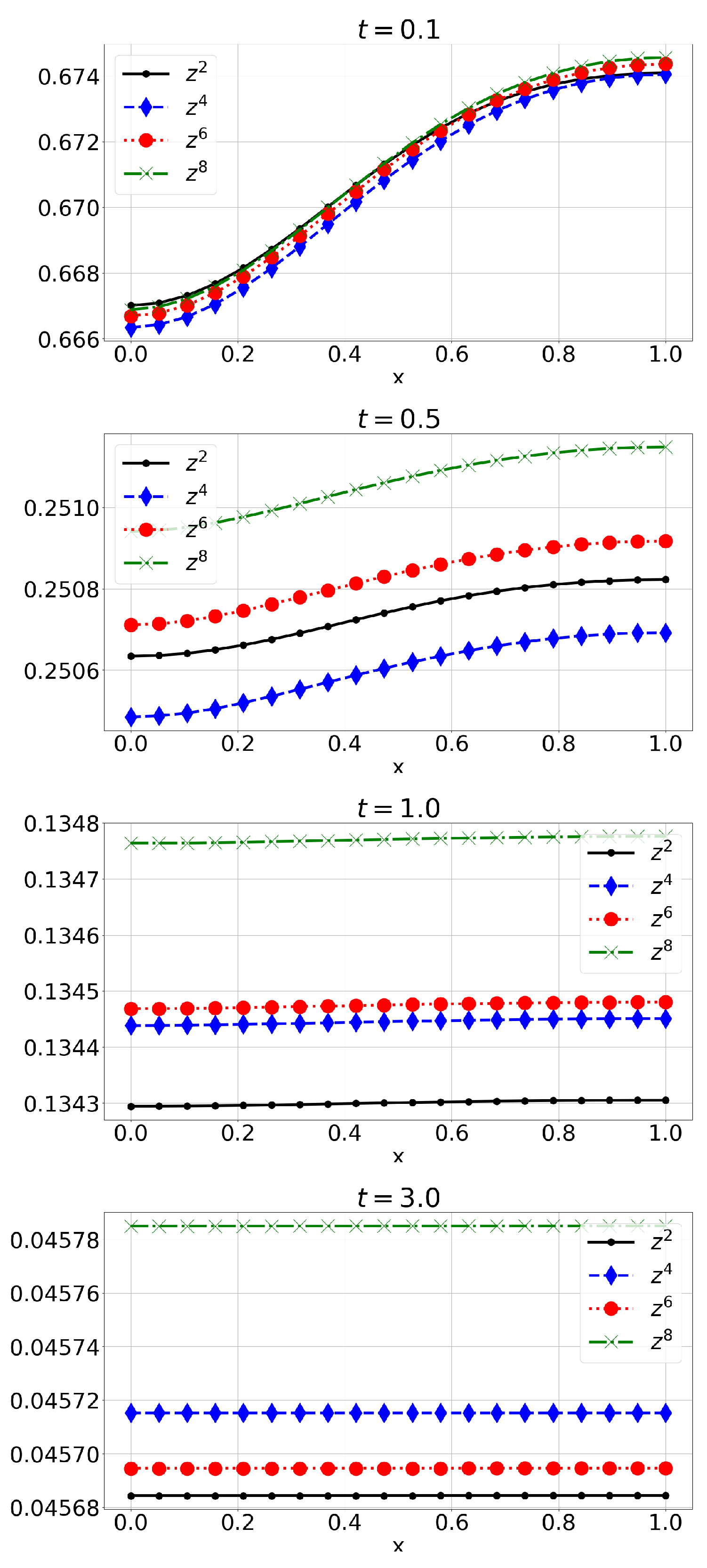
6. Numerical Solution
6.1. Example 1: Initial Conditions with Finite Fourier Expansion (E1)
6.2. Example 2: Initial Conditions Are Polynomials (E2)
7. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lewicka, M.; Mucha, P. On temporal asymptotics for the pth power viscous reactive gas. Nonlinear Anal. Theory Methods Appl. 2004, 57, 951–969. [Google Scholar] [CrossRef]
- Qin, Y.; Huang, L. Global Existence and Exponential Stability for the pth Power Viscous Reactive Gas. Nonlinear Anal.-Theory Methods Appl. 2010, 73, 2800–2818. [Google Scholar] [CrossRef]
- Poland, J.; Kassoy, D. The induction period of a thermal explosion in a gas between infinite parallel plates. Combust. Flame 1983, 50, 259–274. [Google Scholar] [CrossRef]
- Jiang, S. Global spherically symmetric solutions to the equations of a viscous polytropic ideal gas in an exterior domain. Commun. Math. Phys. 1996, 178, 339–374. [Google Scholar] [CrossRef]
- Dražić, I.; Mujaković, N. 3-D flow of a compressible viscous micropolar fluid with spherical symmetry: A local existence theorem. Bound. Value Probl. 2012, 2012, 69. [Google Scholar] [CrossRef]
- Mujaković, N.; Črnjarić-Žic, N. Finite Difference Formulation for the Model of a Compressible Viscous and Heat-Conducting Micropolar Fluid with Spherical Symmetry. In Differential and Difference Equations with Applications: ICDDEA 2015; Pinel, S., Došlá, Z., Došlý, O., Kloeden, P., Eds.; Springer Proceedings in Mathematics & Statistics; Springer: Berlin/Heidelberg, Germany, 2016; p. 164. [Google Scholar] [CrossRef]
- Zhang, X. Spherically symmetric strong solution of compressible flow with large data and density-dependent viscosities. J. Math. Anal. Appl. 2025, 549, 129488. [Google Scholar] [CrossRef]
- Dražić, I.; Mujaković, N.; Črnjarić-Žic, N. Three-dimensional compressible viscous micropolar fluid with cylindrical symmetry: Derivation of the model and a numerical solution. Math. Comput. Simul. 2017, 140, 107–124. [Google Scholar] [CrossRef]
- Eringen, C.A. Simple microfluids. Int. J. Eng. Sci. 1964, 2, 205–217. [Google Scholar] [CrossRef]
- Mujakovic, N. One-dimensional flow of a compressible viscous micropolar fluid: A local existence theorem. Glas. Mat. 1998, 33, 71–91. [Google Scholar]
- Feireisl, E.; Novotný, A. Large time behaviour of flows of compressible, viscous, and heat conducting fluids. Math. Methods Appl. Sci. 2006, 29, 1237–1260. [Google Scholar] [CrossRef]
- Bašić-Šiško, A.; Dražić, I. One-dimensional model and numerical solution to the viscous and heat-conducting reactive micropolar real gas flow and thermal explosion. Iran. J. Sci. Technol. Trans. Mech. Eng. 2022, 47, 19–39. [Google Scholar] [CrossRef]
- Bašić-Šiško, A.; Dražić, I. Local existence for viscous reactive micropolar real gas flow and thermal explosion with homogeneous boundary conditions. J. Math. Anal. Appl. 2022, 509, 125988. [Google Scholar] [CrossRef]
- Bašić-Šiško, A.; Dražić, I. Global existence theorem of a generalized solution for a one-dimensional thermal explosion model of a compressible micropolar real gas. Math. Methods Appl. Sci. 2024, 47, 10024–10039. [Google Scholar] [CrossRef]
- Bašić-Šiško, A.; Dražić, I. Uniqueness of a Generalized Solution for a One-Dimensional Thermal Explosion Model of a Compressible Micropolar Real Gas. Mathematics 2024, 12, 717. [Google Scholar] [CrossRef]
- Bašić-Šiško, A. Large time existence and asymptotic stability of the generalized solution to flow and thermal explosion model of reactive real micropolar gas. Math. Methods Appl. Sci. 2024, 47, 11490–11510. [Google Scholar] [CrossRef]
- Bašić-Šiško, A.; Dražić, I.; Simčić, L. One-dimensional model and numerical solution to the viscous and heat-conducting micropolar real gas flow with homogeneous boundary conditions. Math. Comput. Simul. 2022, 195, 71–87. [Google Scholar] [CrossRef]
- Huang, L.; Li, C.; Yan, X.; Yang, X. Asymptotic stability of one-dimensional compressible viscous and heat-conducting p-th micropolar fluid. Differ. Integral Equ. 2025, 38, 297–326. [Google Scholar] [CrossRef]
- Dražić, I.; Mujaković, N. 3-D flow of a compressible viscous micropolar fluid with spherical symmetry: Large time behavior of the solution. J. Math. Anal. Appl. 2015, 431, 545–568. [Google Scholar] [CrossRef]
- Simčić, L. A shear flow problem for compressible viscous micropolar fluid: Uniqueness of a generalized solution. Math. Methods Appl. Sci. 2019, 42, 6358–6368. [Google Scholar] [CrossRef]
- Bebernes, J.; Bressan, A. Global a priori estimates for a viscous reactive gas. Proc. R. Soc. Edinb. Sect. A Math. 1985, 101, 321–333. [Google Scholar] [CrossRef]
- Qin, Y.; Huang, L. Regularity and exponential stability of the pth Newtonian fluid in one space dimension. Math. Model. Methods Appl. Sci.–M3AS 2010, 20, 589–610. [Google Scholar] [CrossRef]
- Wang, T. One dimensional p-th power Newtonian fluid with temperature-dependent thermal conductivity. Commun. Pure Appl. Anal. 2016, 15, 477–494. [Google Scholar] [CrossRef]
- Cui, H.; Yao, Z.a. Asymptotic behavior of compressible p-th power Newtonian fluid with large initial data. J. Differ. Equ. 2015, 258, 919–953. [Google Scholar] [CrossRef]
- Watson, S.; Lewicka, M. Temporal asymptotics for the p’th power Newtonian fluid in one space dimension. Z. Angew. Math. Phys. 2003, 54, 633–651. [Google Scholar] [CrossRef]
- Wan, L.; Wang, T. Asymptotic behavior for the one-dimensional pth power Newtonian fluid in unbounded domains. Math. Methods Appl. Sci. 2015, 39, 1020–1025. [Google Scholar] [CrossRef]
- Bašić-Šiško, A.; Simčić, L.; Dražić, I. Three-dimensional model of a spherically symmetric compressible micropolar fluid flow with real gas equation of state. Symmetry 2024, 16, 1330. [Google Scholar] [CrossRef]
- Zhang, M. On the Cauchy problem of three-dimensional compressible magneto-micropolar fluids with vacuum. Math. Nachrichten 2025, 298, 1449–1481. [Google Scholar] [CrossRef]
- El-Sapa, S.; Faltas, M.S. Mobilities of two spherical particles immersed in a magneto-micropolar fluid. Phys. Fluids 2022, 34, 013104. [Google Scholar] [CrossRef]
- Pop, I.; Groșan, T.; Revnic, C.; Roșca, A.V. Unsteady flow and heat transfer of nanofluids, hybrid nanofluids, micropolar fluids and porous media: A review. Therm. Sci. Eng. Prog. 2023, 46, 102248. [Google Scholar] [CrossRef]
- Jalili, B.; Azar, A.A.; Jalili, P.; Ganji, D.D. Analytical approach for micropolar fluid flow in a channel with porous walls. Alex. Eng. J. 2023, 79, 196–226. [Google Scholar] [CrossRef]
- El-Sapa, S. Cell models for micropolar fluid past a porous micropolar fluid sphere with stress jump condition. Phys. Fluids 2022, 34, 082014. [Google Scholar] [CrossRef]
- Mekheimer, K.S.; Elnaqeeb, T.; El Kot, M.; Alghamdi, F. Simultaneous effect of magnetic field and metallic nanoparticles on a micropolar fluid through an overlapping stenotic artery: Blood flow model. Phys. Essays 2016, 29, 272–283. [Google Scholar] [CrossRef]
- Lukaszewicz, G. Micropolar Fluids: Theory and Applications; Modeling and Simulation in Science, Engineering and Technology; Birkhäuser: Boston, MA, USA, 1999. [Google Scholar]
- Qin, Y.; Zhang, J.; Su, X.; Cao, J. Global Existence and Exponential Stability of Spherically Symmetric Solutions to a Compressible Combustion Radiative and Reactive Gas. J. Math. Fluid Mech. 2016, 18, 415–461. [Google Scholar] [CrossRef]
- Qin, Y.; Huang, L. Global Well-Posedness of Nonlinear Parabolic-Hyperbolic Coupled Systems, 1st ed.; Frontiers in Mathematics; Birkhäuser: Basel, Swizterland, 2012. [Google Scholar] [CrossRef]
- Antontsev, S.N.; Kazhikhov, A.V.; Monakhov, V.N. Boundary Value Problems in Mechanics of Nonhomogeneous Fluids, Volume 22; Studies in Mathematics and its Applications; North-Holland Publishing Co.: Amsterdam, Switzerland, 1989. [Google Scholar]
- Dražić, I.; Bašić-Šiško, A. Local existence theorem for micropolar viscous real gas flow with homogeneous boundary conditions. Math. Methods Appl. Sci. 2023, 46, 5395–5421. [Google Scholar] [CrossRef]
- Stachurska, B. On a nonlinear integral inequality. Zesz. Nauk. Uniw. Jagiellońskiego. Pr. Mat. 1971, 15, 151–157. [Google Scholar]
- Ladyzhenskaya, O.A.; Solonnikov, V.A.; Ural’tseva, N.N. Linear and Quasilinear Equations of Parabolic Type; Translations of Mathematical Monographs; American Mathematical Society: Providence, RI, USA, 1968. [Google Scholar]
- Evans, L. Partial Differential Equations; Graduate Studies in Mathematics; American Mathematical Society: Providence, RI, USA, 2010. [Google Scholar]
- Dražić, I.; Mujaković, N. Approximate solution for 1-D compressible viscous micropolar fluid model in dependence of initial conditions. Int. J. Pure Appl. Math. 2008, 42, 535–540. [Google Scholar]
- Mujaković, N.; Dražić, I. Numerical approximations of the solution for one-dimensional compressible viscous micropolar fluid model. Int. J. Pure Appl. Math. 2007, 38, 285–296. [Google Scholar]
- Črnjarić Žic, N.; Mujaković, N. Numerical analysis of the solutions for 1d compressible viscous micropolar fluid flow with different boundary conditions. Math. Comput. Simul. 2016, 126, 45–62. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bašić-Šiško, A. Real Reactive Micropolar Spherically Symmetric Fluid Flow and Thermal Explosion: Modelling and Existence. Mathematics 2025, 13, 2448. https://doi.org/10.3390/math13152448
Bašić-Šiško A. Real Reactive Micropolar Spherically Symmetric Fluid Flow and Thermal Explosion: Modelling and Existence. Mathematics. 2025; 13(15):2448. https://doi.org/10.3390/math13152448
Chicago/Turabian StyleBašić-Šiško, Angela. 2025. "Real Reactive Micropolar Spherically Symmetric Fluid Flow and Thermal Explosion: Modelling and Existence" Mathematics 13, no. 15: 2448. https://doi.org/10.3390/math13152448
APA StyleBašić-Šiško, A. (2025). Real Reactive Micropolar Spherically Symmetric Fluid Flow and Thermal Explosion: Modelling and Existence. Mathematics, 13(15), 2448. https://doi.org/10.3390/math13152448