
Smooth UAV Path Planning Based on Composite-Energy-Minimizing Bézier Curves



Abstract
1. Introduction
2. Preliminary
3. Considered Energy Functionals for Smooth UAV Path Planning
4. The Planning of Energy-Minimizing Bézier UAV Path
5. Comparison with Other Path Smoothing Algorithms
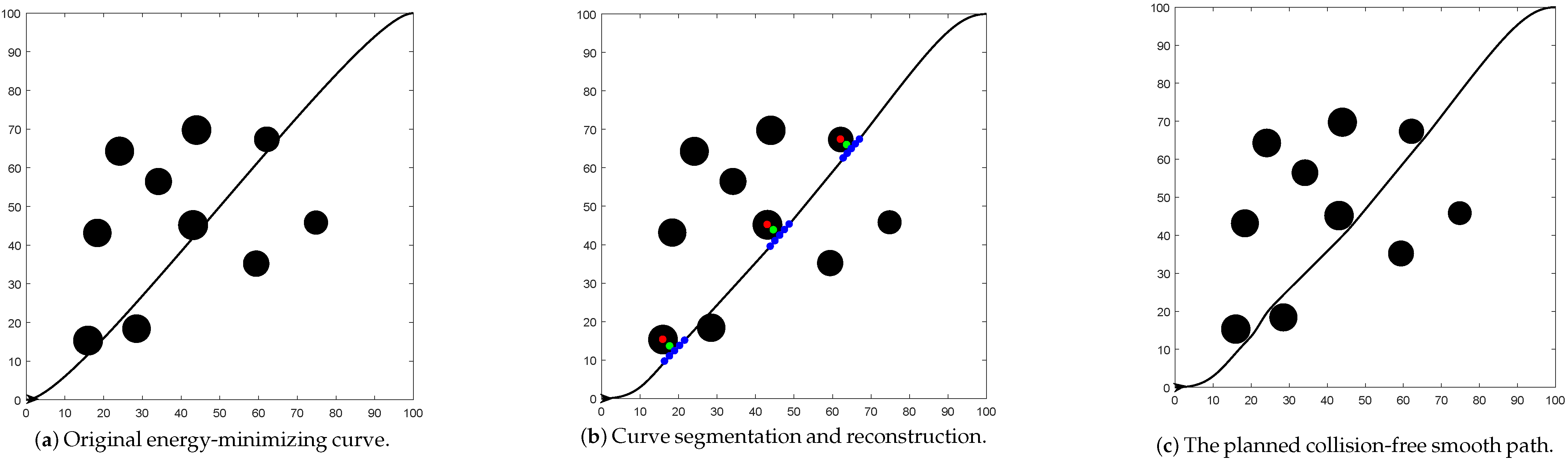
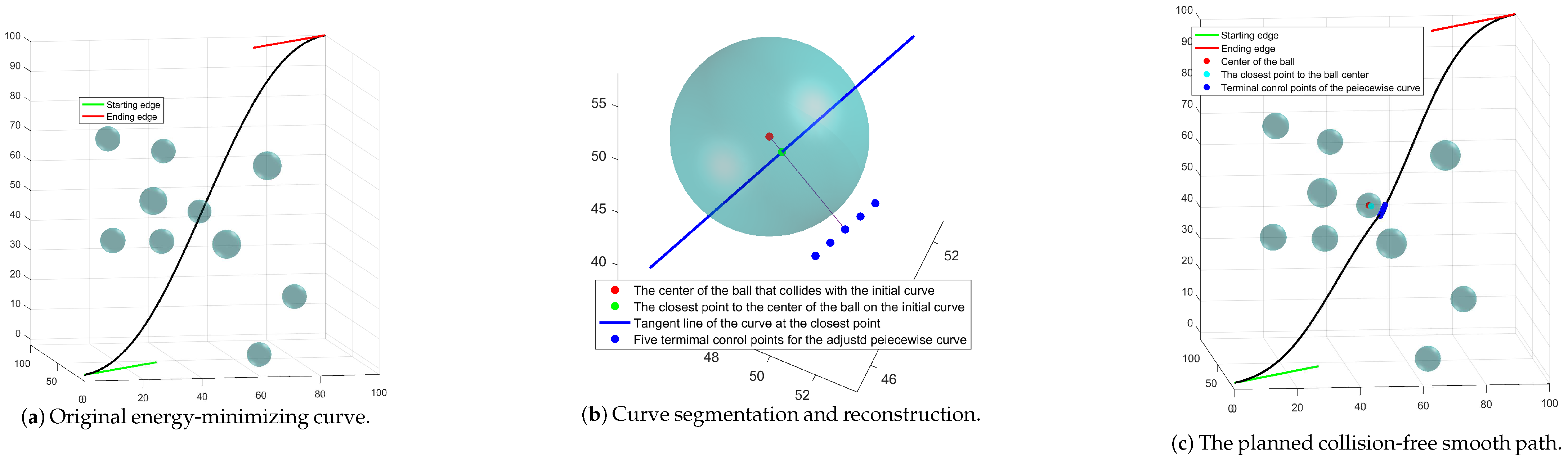
6. Obstacle Avoidance for UAVs Based on Piecewise Curve
6.1. Construction of Smooth Piecewise Path Curve Using Multiple Bézier Curves
6.2. Design of Collision-Free Smooth Path for UAVs
7. Results Discussion
- (1)
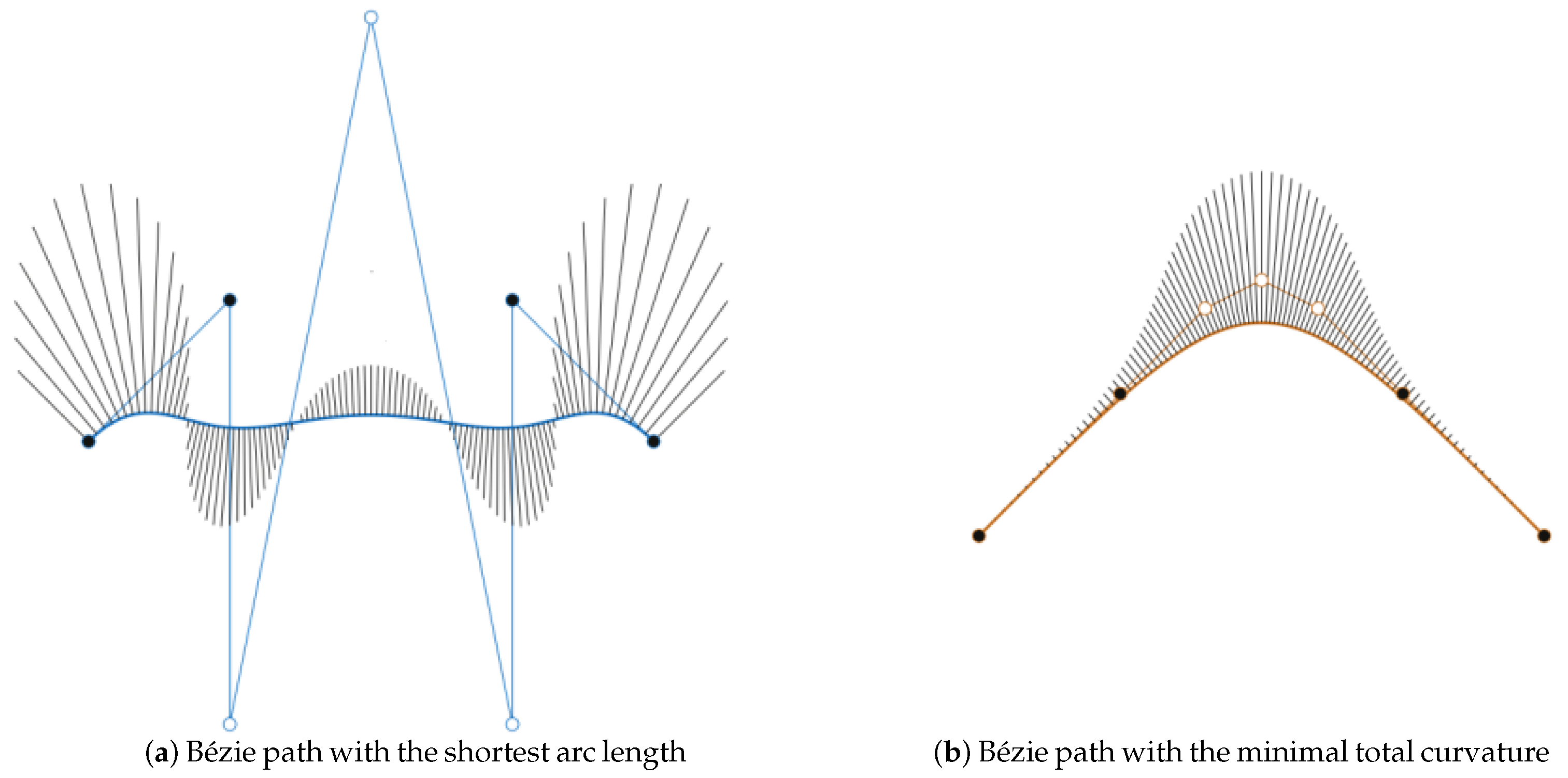
- It can be seen from Figure 2a, Figure 3a, Figure 4a and Figure 9a that though the curve optimization based on stretching energy can help obtain UAVs flight path with a very short distance so as to reduce energy consumption and execution time of UAVs, the smoothness of these curves is very poor. Specifically, the overall curvature of these curves is large, especially at the corners of both ends of the curve, which is not conducive to UAV flight.
- (2)
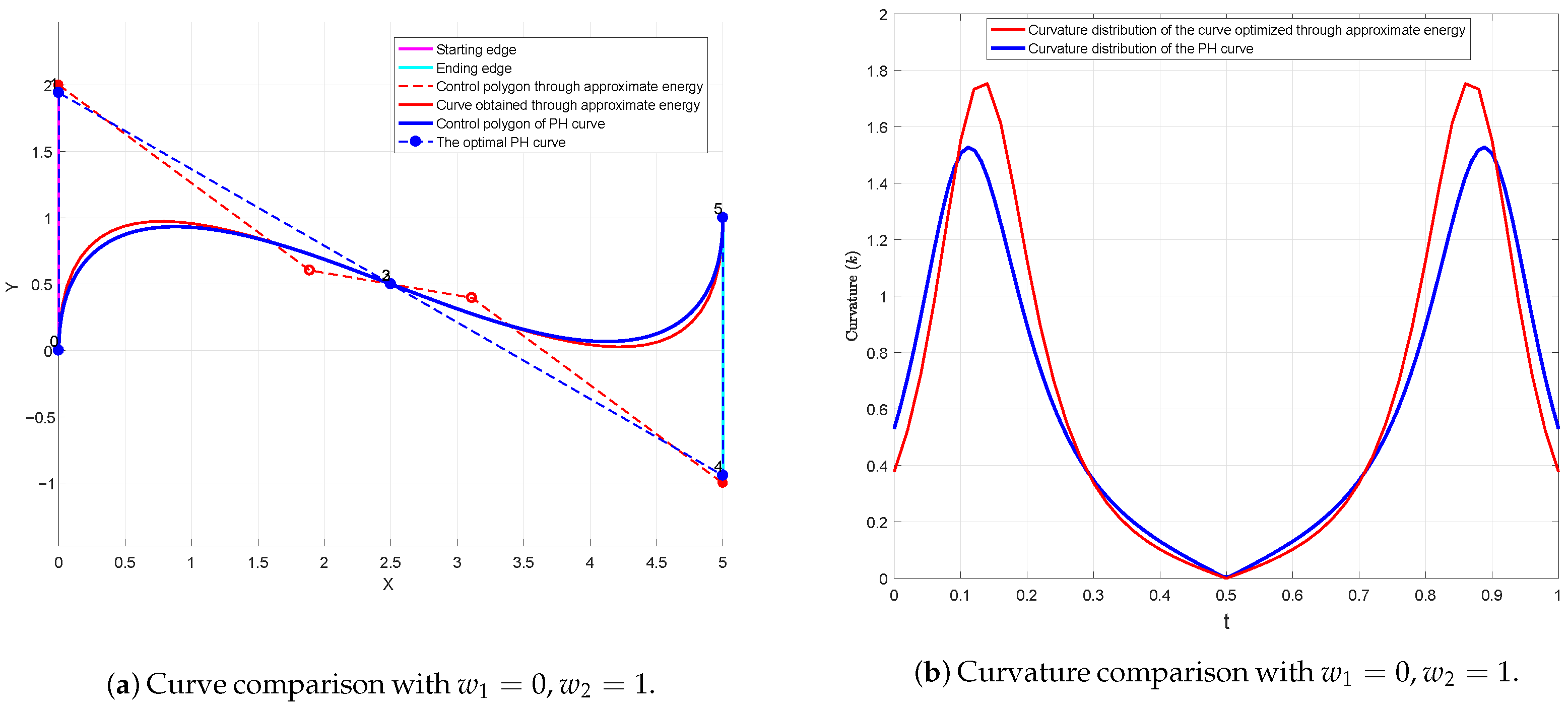
- From Figure 2b, Figure 3b, Figure 4b and Figure 9b, it is evident that curve optimization based on bending energy can help obtain a UAV’s flight path with very good smoothness; however, the length of the flight path is usually long, which will increase the energy consumption and execution time of the UAVs. In addition, curve optimization based on bending energy can minimize the overall curvature (integral of curvature) of the curve, but the maximum curvature value of the curve is not necessarily the minimum in the candidate flight curve of UAVs. In UAV path planning, maintaining an instantaneous curvature below aircraft-specific thresholds proves more critical than minimizing total curvature accumulation.
- (3)
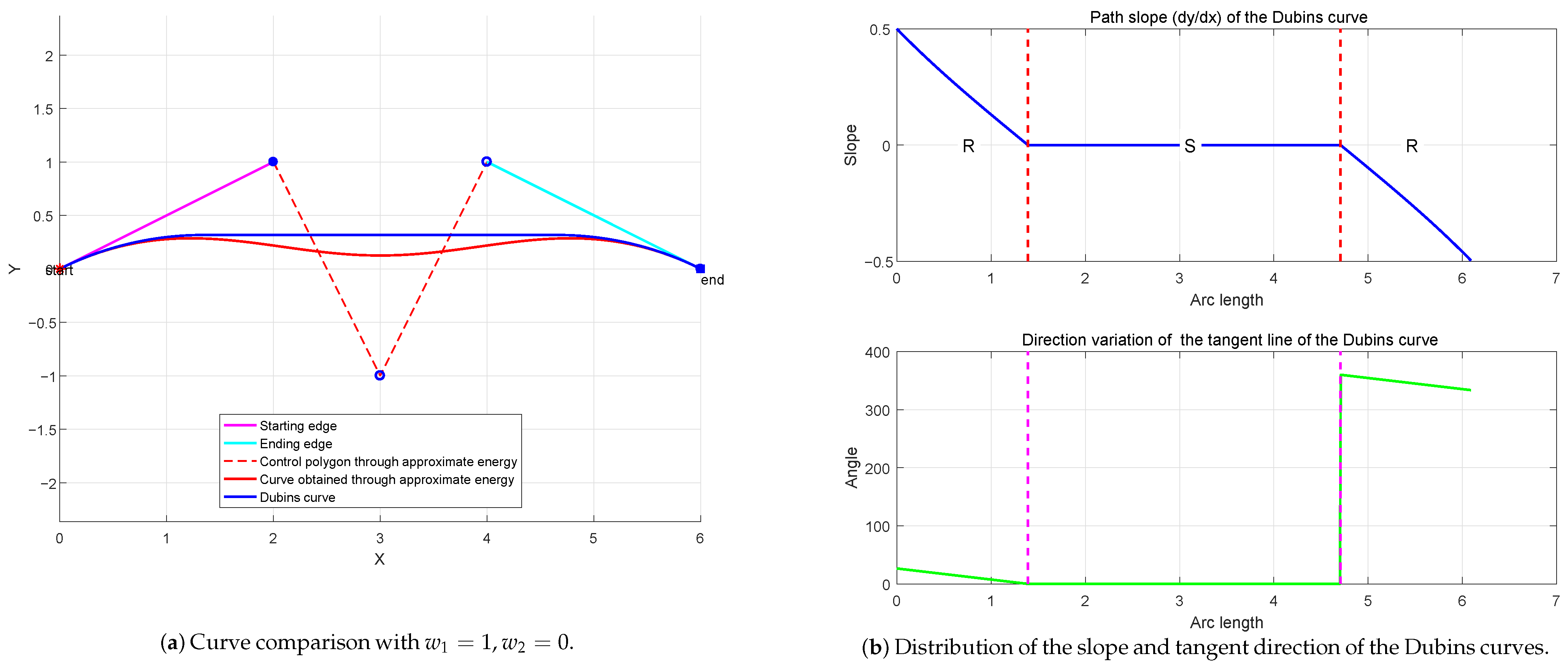
- By contrast, visual analysis of Figure 2c, Figure 3c, Figure 4c and Figure 9c and Figure 2d, Figure 3d, Figure 4d and Figure 9d,e indicates that, on the one hand, optimization based on composite energy can reduce the arc length of path; on the other hand, as can be seen from Figure 3d, Figure 9d and Figure 9e, sometimes the maximum curvature of the curve obtained by optimizing the composite energy is actually smaller than that obtained by optimizing the bending energy only and thus is more conducive to the safe and stable flight of UAVs.
- (4)
- From Figure 2e, Figure 3e, Figure 4e and Figure 2f, Figure 3f, Figure 4f, it is evident that when and , namely, , the shape of the optimal curve is not sensitive to the value changes of the weight parameters and . As gradually increases and gradually decreases, namely, as gradually decreases, the shape of the curve becomes increasingly sensitive to the changes in the values of the weight parameters and .
- (5)
- (6)
- Limitations of the proposed method: The study in this paper only considers the direction and curvature constraints of UAVs at the ends of a short path, and other dynamic constraints of UAVs were not fully taken into account. In addition, the study in this paper merely remains at the theoretical analysis level to provides a new theoretical approach; thus, the effectiveness of the method and the optimal values of the weight parameters have not yet been verified on UAVs. Therefore, further improvements are needed in the future.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Abdel-Basset, M.; Mohamed, R.; Alrashdi, I.; Sallam, K.M.; Hameed, I.A. Evolution-based energy-efficient data collection system for UAV-supported IoT: Differential evolution with population size optimization mechanism. Expert Syst. Appl. 2024, 245, 123082. [Google Scholar] [CrossRef]
- Dayarian, I.; Savelsbergh, M.; Clarke, J. Same-day delivery with drone resupply. Transp. Sci. 2020, 54, 229–249. [Google Scholar] [CrossRef]
- Liu, Y. An elliptical cover problem in drone delivery network design and its solution algorithms. Eur. J. Oper. Res. 2023, 304, 912–925. [Google Scholar] [CrossRef]
- Dukkanci, O.; Campbell, J.F.; Kara, B.Y. Facility location decisions for drone delivery: A literature review. Eur. J. Oper. Res. 2023, 316, 397–418. [Google Scholar] [CrossRef]
- Hu, D.; Ba, Y.; Cao, W.; Lin, C.; Wang, Z. An improved A-Star algorithm for path planning of outdoor distribution robots. ACM Int. Conf. Proc. Ser. 2022, 66, 1–6. [Google Scholar]
- Long, T. Improved A-star algorithm in efficiency enhancing and path smoothing. In Proceedings of the 2023 IEEE International Conference on Control, Electronics and Computer Technology, ICCECT, Jilin, China, 28–30 April 2023; pp. 28–31. [Google Scholar]
- Sarbini, R.N.; Ahmad, I.; Bura, R.O.; Simbolon, L. Development of pathfinding using A-star and D-star lite algorithms in video game. J. Theor. Appl. Inf. Technol. 2024, 102, 832–841. [Google Scholar]
- Liu, Y.; Chen, C.; Wang, Y.; Zhang, T.; Gong, Y. A fast formation obstacle avoidance algorithm for clustered UAVs based on artificial potential field. Aerosp. Sci. Technol. 2024, 147, 108974. [Google Scholar] [CrossRef]
- Tang, X.; Jia, C.; Liu, Y. Fuzzy enhanced artificial potential field-based mobile car path planning. ACM Int. Conf. Proc. Ser. 2022, 83, 1–6. [Google Scholar]
- Naderi, K.; Rajamäki, J.; Hämäläinen, P. RT-RRT*: A real-time path planning algorithm based on RRT. In Proceedings of the ACM SIGGRAPH Conference on Motion in Games, Paris, France, 16–18 November 2015; pp. 113–118. [Google Scholar]
- Armstrong, D.; Jonasson, A. AM-RRT*: Informed sampling-based planning with assisting metric. In Proceedings of the IEEE International Conference on Robotics and Automation, Xi’an, China, 30 May–5 June 2021; pp. 10093–10099. [Google Scholar]
- Wang, J.; Chi, W.; Li, C.; Meng, M. Efficient robot motion planning using bidirectional-unidirectional RRT extend function. IEEE Trans. Autom. Sci. Eng. 2022, 19, 1859–1868. [Google Scholar] [CrossRef]
- Ma, H.; Meng, F.; Ye, C.; Wang, J.; Meng, M. Bi-risk-RRT based efficient motion planning for mobile robots. IEEE Trans. Intell. Veh. 2022, 7, 722–733. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, H.; Yin, M.; Wang, J.; Hua, C. Bi-AM-RRT*: A Fast and Efficient Sampling-Based Motion Planning Algorithm in Dynamic Environments. IEEE Trans. Intell. Veh. 2023, 9, 1282–1293. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Incremental sampling-based algorithms for optimal motion planning. Robot. Sci. Syst. 2010, 104, 267–274. [Google Scholar]
- Islam, F.; Nasir, J.; Malik, U.; Ayaz, Y.; Hasan, O. RRT*-smart: Rapid convergence implementation of RRT* towards optimal solution. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 1651–1656. [Google Scholar]
- Yi, D.; Thakker, R.; Gulino, C.; Salzman, O.; Srinivasa, S. Generalizing Informed Sampling for Asymptotically-Optimal Sampling-Based Kinodynamic Planning via Markov Chain Monte Carlo. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, 21–25 May 2018; pp. 7063–7070. [Google Scholar] [CrossRef]
- Chen, L.; Shan, Y.; Tian, W.; Li, B.; Cao, D. A fast and efficient double-tree RRT*-like sampling-based planner applying on mobile robotic systems. IEEE/ASME Trans. Mechatron. 2018, 23, 2568–2578. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, P.; Cui, K.; Zhou, H.; Yang, J.; Kong, X. An obstacle avoidance path planning and evaluation method for intelligent vehicles based on the B-spline algorithm. Sensors 2023, 23, 8151. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Wu, N.; Huang, J.; Wang, J. Smoothing algorithm of air target track based on improved cubic B-spline curve proceedings of SPIE. Int. Soc. Opt. Eng. 2023, 12756, 127564B. [Google Scholar]
- Park, S. Three-dimensional dubins-path-guided continuous curvature path smoothing. Appl. Sci. 2022, 12, 11336. [Google Scholar] [CrossRef]
- Wu, W.; Xu, J.; Gong, C.; Cui, N. Adaptive path following control for miniature unmanned aerial vehicle confined to three-dimensional Dubins path: From take-off to landing. ISA Trans. 2023, 143, 156–167. [Google Scholar] [CrossRef] [PubMed]
- Ren, H.; Fujisawa, K. Obstacle avoidable G2-continuous trajectory generated with clothoid Spline solution. In Proceedings of the 2021 6th International Conference on Control and Robotics Engineering, ICCRE, Beijing, China, 16–18 April 2021; pp. 23–27. [Google Scholar]
- Zheng, A.; Li, B.; Zheng, M.; Zhang, L. UAV trajectory planning based on PH curve improved by particle swarm optimization and quasi-newton method. Adv. Intell. Technol. Ind. 2022, 285, 423–433. [Google Scholar]
- Shao, Z.; Zhou, Z.; Qu, G.; Zhu, X. Reference path planning for UAVs formation flight based on PH curve. Lect. Notes Electr. Eng. 2023, 913, 155–168. [Google Scholar]
- Celestini, D.; Primatesta, S.; Capello, E. Trajectory Planning for UAVs Based on Interfered Fluid Dynamical System and Bézier Curves. IEEE Robot. Autom. Lett. 2022, 7, 9620–9626. [Google Scholar] [CrossRef]
- Bulut, V. Path planning of mobile robots in dynamic environment based on analytic geometry and cubic Bézier curve with three shape parameters. Expert Syst. Appl. 2023, 233, 120942. [Google Scholar] [CrossRef]
- Niu, T.; Wang, L.; Xu, Y.; Wang, J.; Wang, S. Quintic Bézier curve and numerical optimal solution based path planning approach in seismic exploration. Control Eng. Pract. 2024, 145, 105855. [Google Scholar] [CrossRef]
- Juhász, I.; Róth, Á. Adjusting the Energies of Curves Defined by Control Points. Comput.-Aided Des. 2019, 107, 77–88. [Google Scholar] [CrossRef]
- Cao, H.; Zheng, H.; Hu, G. Adjusting the energy of Ball surfaces by modifying unfixed control balls. Numer. Algorithms 2022, 89, 749–768. [Google Scholar] [CrossRef]
- Cao, H.; Zheng, H.; Hu, G. Adjusting the energy of Ball curves by modifying movable control balls. Comput. Appl. Math. 2021, 40, 76. [Google Scholar] [CrossRef]
- Farin, G. Curves and Surfaces for CAGD: A Practical Guide; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Prautzsch, H.; Boehm, W.; Paluszny, M. Bézier and B-Spline Techniques; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- LaValle, L.J.K.; Kuffner, J.J. RRT-Connect: An Efficient Approach to Single-Query Path Planning. IEEE Int. Conf. Robot. Autom. (ICRA) 2000, 2, 473–479. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Max Curvature | Path Length | Computation Time |
|---|---|---|---|
| Path optimized through accurate bending energy | 0.172 | 6.25 | 0.95s |
| The proposed method with | 0.19 | 6.31 | 0.31s |
| The proposed method with | 0.173 | 6.24 | 0.38s |
| The proposed method with | 0.162 | 6.14 | 0.39s |
| Method | Max Curvature | Path Length | Computation Time |
|---|---|---|---|
| Path optimized through accurate arc length formula | 0.379 | 6.13 | 0.59s |
| The proposed method with | 0.382 | 6.13 | 0.30s |
| Method | Path Length | Computation Time |
|---|---|---|
| Dubins curve | 6.09 | 0.33s |
| The proposed method with | 6.11 | 0.31s |
| Method | Max Curvature | Path Length | Computation Time |
|---|---|---|---|
| Path optimized through accurate arc length formula | 1.53 | 6.33 | 1.43s |
| The proposed method with | 1.76 | 6.34 | 0.35s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, H.; Du, Z.; Hu, G.; Xu, Y.; Zheng, L. Smooth UAV Path Planning Based on Composite-Energy-Minimizing Bézier Curves. Mathematics 2025, 13, 2318. https://doi.org/10.3390/math13142318
Cao H, Du Z, Hu G, Xu Y, Zheng L. Smooth UAV Path Planning Based on Composite-Energy-Minimizing Bézier Curves. Mathematics. 2025; 13(14):2318. https://doi.org/10.3390/math13142318
Chicago/Turabian StyleCao, Huanxin, Zhanhe Du, Gang Hu, Yi Xu, and Lanlan Zheng. 2025. "Smooth UAV Path Planning Based on Composite-Energy-Minimizing Bézier Curves" Mathematics 13, no. 14: 2318. https://doi.org/10.3390/math13142318
APA StyleCao, H., Du, Z., Hu, G., Xu, Y., & Zheng, L. (2025). Smooth UAV Path Planning Based on Composite-Energy-Minimizing Bézier Curves. Mathematics, 13(14), 2318. https://doi.org/10.3390/math13142318