
Periodic Oscillatory Solutions for a Nonlinear Model with Multiple Delays


Abstract
1. Introduction
2. Preliminaries
3. The Existence of Oscillatory Solutions
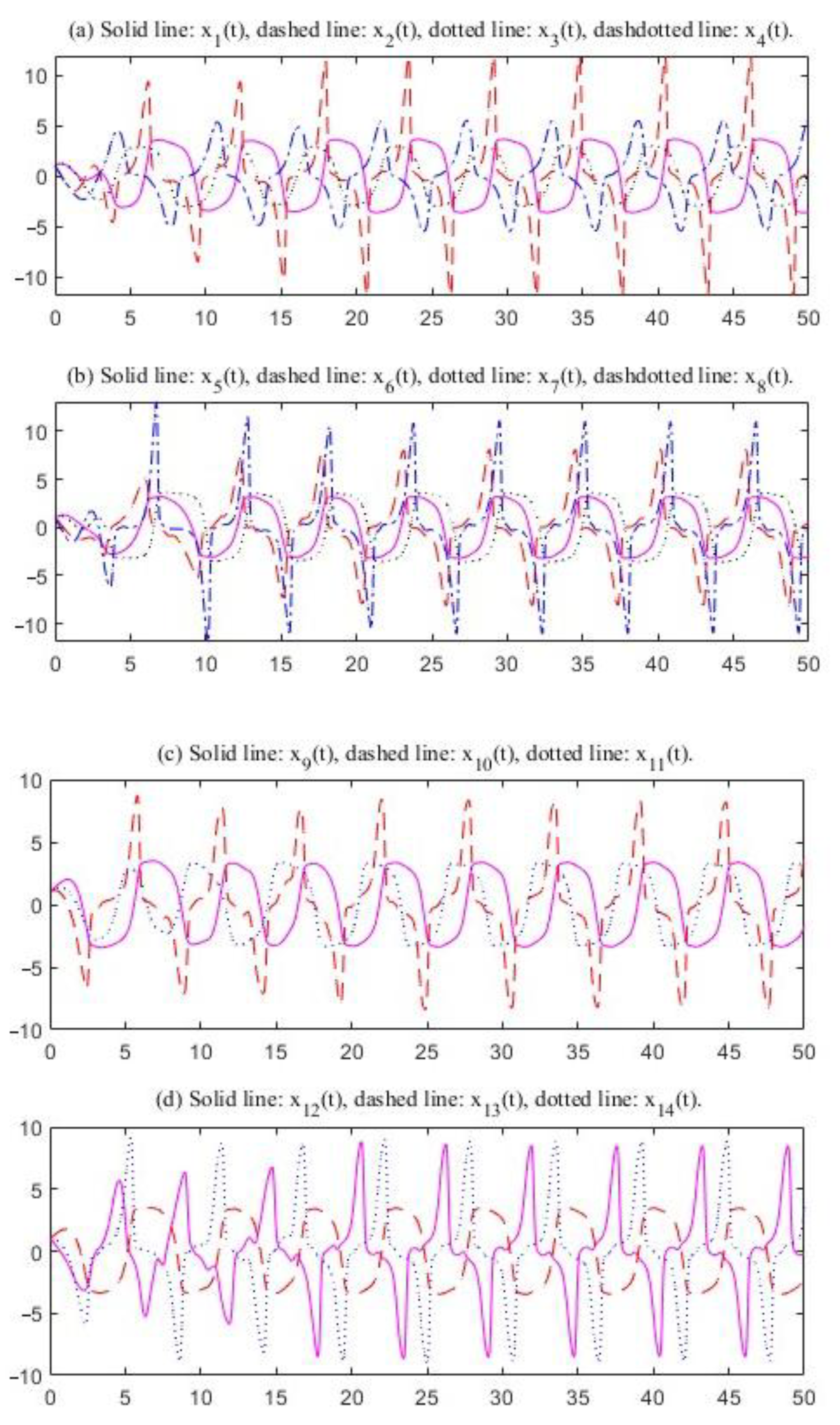
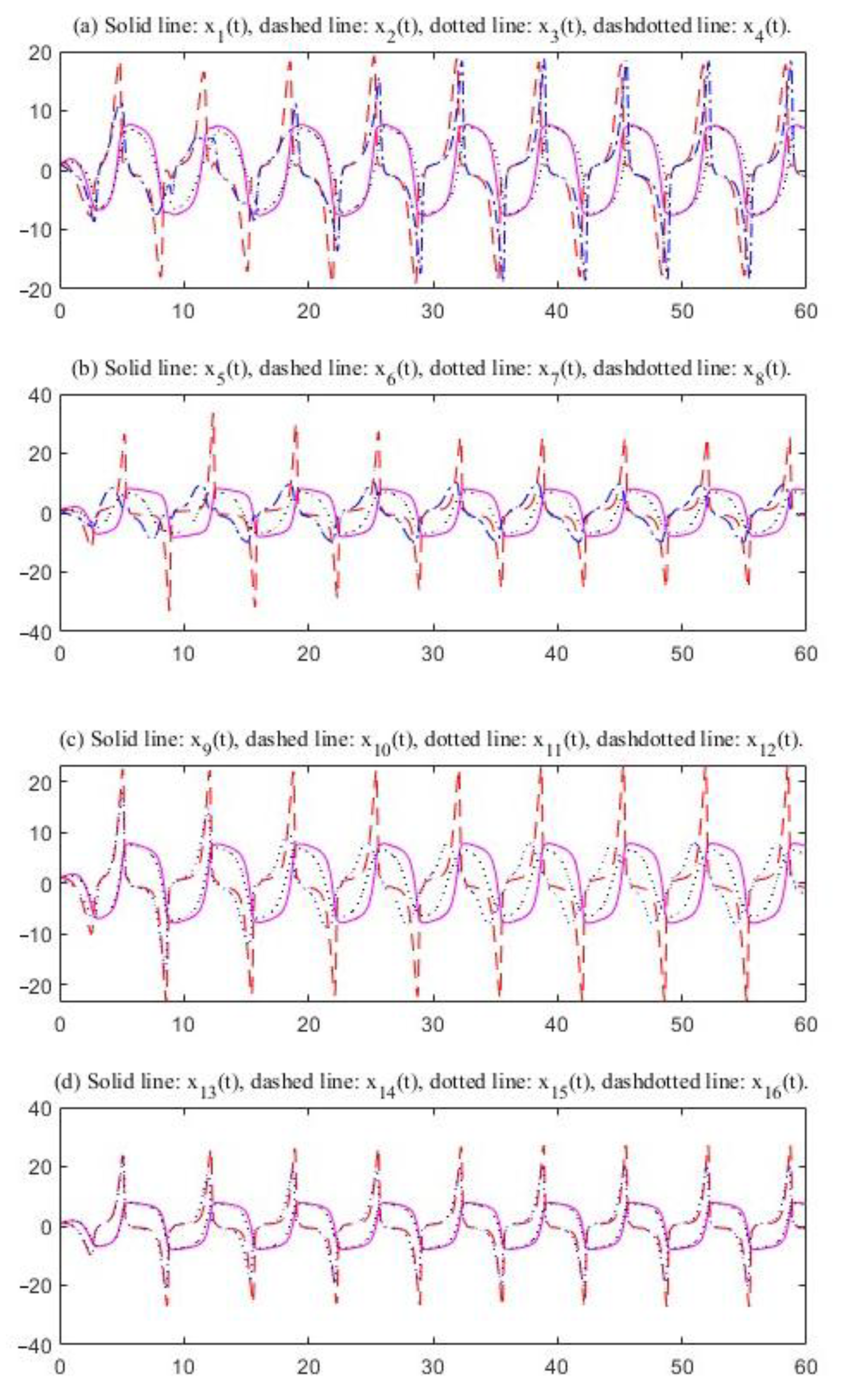
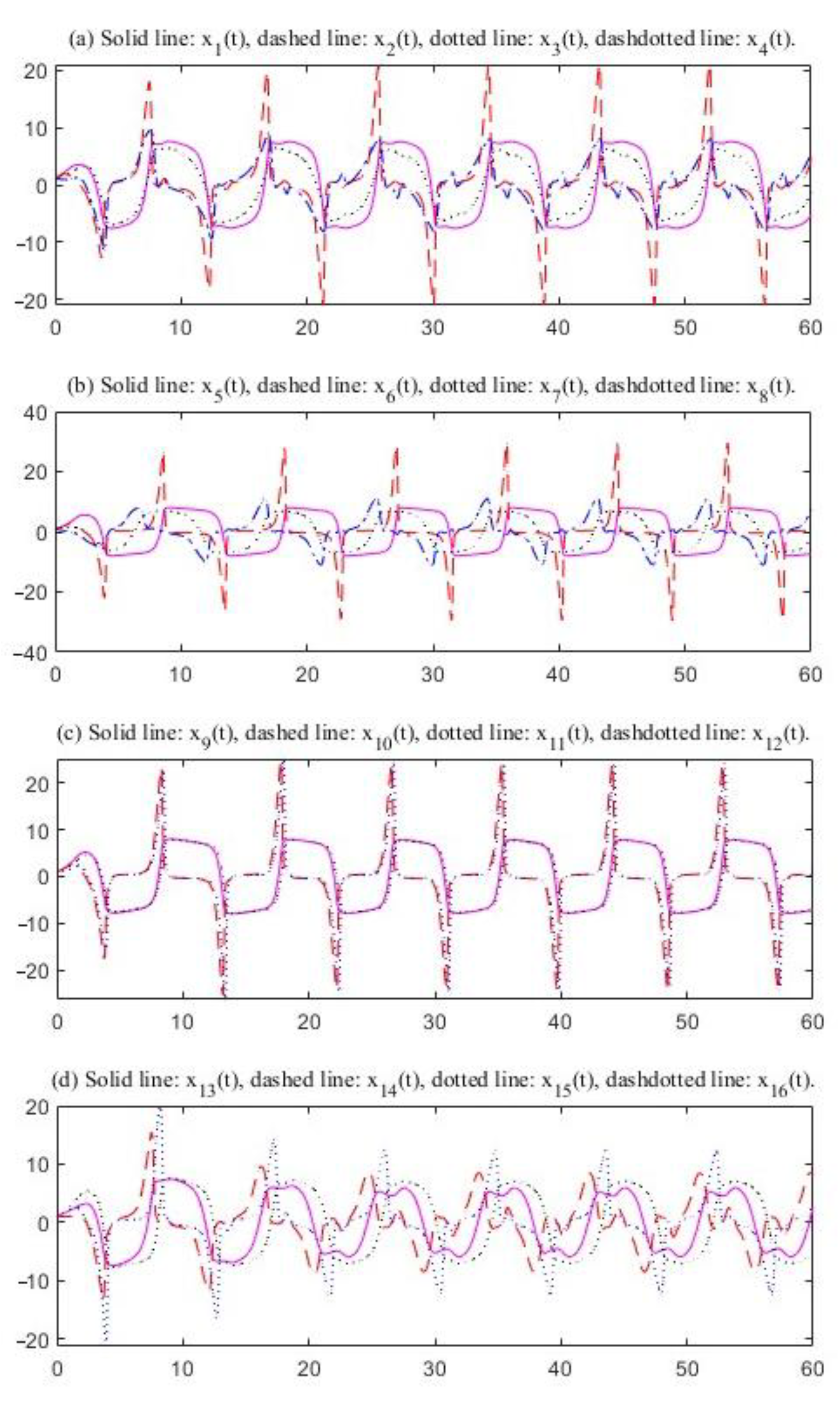
4. Simulation Result
5. Discussion
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Torres, J.A.; Ramirez, J.P.; Nijmeijer, H. Coordination of oscillators driven by non-identical van der Pol excitation interacting via Huygens’ coupling. IFAC Pap. 2024, 58, 34–39. [Google Scholar] [CrossRef]
- Qian, Y.H.; Chen, S.M. Accurate approximate analytical solutions for multi-degree-of-freedom coupled van der Pol-Duffing oscillators by homotopy analysis method. Commun. Nonlinear Sci. Numer. Simulat. 2010, 15, 3113–3130. [Google Scholar] [CrossRef]
- Ma, X.D.; Yu, Y.; Wang, L.F. Complex mixed-mode vibration types triggered by the pitchfork bifurcation delay in a driven van der Pol-Duffing oscillator. App. Math. Comput. 2021, 411, 126522. [Google Scholar] [CrossRef]
- Ma, X.D.; Zhang, Z. Symmetric and asymmetric bursting oscillations in a hybrid van der Pol-Duffing-Rayleigh system. Chaos Solitons Fractals 2024, 186, 115310. [Google Scholar] [CrossRef]
- Jiang, Y.D.; Zhang, W.; Zhang, Y.F.; Bi, Q.S. Bursting oscillations in coupling Mathieu-van der Pol oscillator under parametric excitation. Chaos Solitons Fractals 2024, 178, 114279. [Google Scholar] [CrossRef]
- Liu, H.Y.; Ai, X.H. Exponential input-to-state stability for coupled Van der Pol system driven by a second-order process. Commun. Nonlinear Sci. Numer. Simulat. 2025, 141, 108480. [Google Scholar] [CrossRef]
- Niu, B.; Jiang, W.H. Multiple bifurcation analysis in a NDDE arising from van der Pol’s equation with extended delay feedback. Nonlinear Anal. RWA 2013, 14, 699–717. [Google Scholar] [CrossRef]
- Ghosh, D.; Chowdhury, A.R.; Saha, P. On the various kinds of synchronization in delayed Duffing-Van der Pol system. Commun. Nonlinear Sci. Numer. Simulat. 2008, 13, 790–803. [Google Scholar] [CrossRef]
- Cen, Z.H.; Xie, F. Darboux integrability of a Mathieu-van der Pol-Duffing oscillator. Nonlinear Anal. RWA 2023, 70, 103785. [Google Scholar] [CrossRef]
- Sysoev, I.V. Reconstruction of ensembles of generalized Van der Pol oscillators from vector time series. Phys. D Nonlinear Phenom. 2018, 384–385, 1–11. [Google Scholar] [CrossRef]
- Hoskoti, L.; Aravinth, D.; Misra, A.; Sucheendran, M.M. Frequency lock-in during nonlinear vibration of an airfoil coupled with van der Pol oscillator. J. Fluids Struct. 2020, 92, 102776. [Google Scholar] [CrossRef]
- Fotsin, H.; Bowong, S. Adaptive control and synchronization of chaotic systems consisting of van der Pol oscillators coupled to linear oscillators. Chaos Solitons Fractals 2006, 27, 822–835. [Google Scholar] [CrossRef]
- Cai, C.C.; Shen, Y.J.; Wen, S.F. Primary and super-harmonic simultaneous resonance of van der Pol oscillator. Int. J. Non-Linear Mech. 2022, 147, 104237. [Google Scholar] [CrossRef]
- Ma, X.D.; Jiang, W.A.; Yu, Y. Periodic bursting behaviors induced by pulse-shaped explosion or non-pulse-shaped explosion in a van der Pol-Mathieu oscillator with external excitation. Commun. Nonlinear Sci. Numer. Simulat. 2021, 103, 105959. [Google Scholar] [CrossRef]
- Maccari, A. Modulated motion and infinite-period bifurcation for two non-linearly coupled and parametrically excited van der Pol oscillators. Int. J. Non-Linear Mech. 2001, 36, 335–347. [Google Scholar] [CrossRef]
- Yonkeu, R.M.; Yamapi, R.; Filatrella, G.; Tchawoua, C. Effects of a periodic drive and correlated noise on birhythmic van der Pol systems. Phys. A Stat. Mech. Appl. 2017, 466, 552–569. [Google Scholar] [CrossRef]
- Saha, S.; Gangopadhyay, G.; Ray, D.S. Systematic designing of bi-rhythmic and tri-rhythmic models in families of Van der Pol and Rayleigh oscillators. Commun. Nonlinear Sci. Numer. Simulat. 2020, 85, 105234. [Google Scholar] [CrossRef]
- Kumar, P.; Narayanan, S.; Gupta, S. Investigations on the bifurcation of a noisy Duffing–Van der Pol oscillator. Probabilistic Eng. Mech. 2016, 75, 70–86. [Google Scholar] [CrossRef]
- Fotsin, H.B.; Woafo, P. Adaptive synchronization of a modified and uncertain chaotic Van der Pol-Duffing oscillator based on parameter identification. Chaos Solitons Fractals 2005, 24, 1363–1371. [Google Scholar] [CrossRef]
- Erlicher, S.; Trovato, A.; Argoul, P. A modified hybrid Van der Pol/Rayleigh model for the lateral pedestrian force on a periodically moving floor. Mech. Syst. Signal Process. 2013, 41, 485–501. [Google Scholar] [CrossRef]
- Brechtl, J.; Xie, X.; Liaw, P.K. Investigation of chaos and memory effects in the Bonhoeffer-van der Pol oscillator with a non-ideal capacitor. Commun. Nonlinear Sci. Numer. Simulat. 2019, 73, 195–216. [Google Scholar] [CrossRef]
- Zhang, C.R.; Zheng, B.D.; Wang, L.C. Multiple Hopf bifurcations of three coupled van der Pol oscillators with delay. Appl. Math. Comput. 2011, 217, 7155–7166. [Google Scholar] [CrossRef]
- Liu, L.Q.; Zhang, C.R. Multiple Hopf bifurcations of four coupled van der Pol oscillators with delay. Mathematics 2023, 11, 4831. [Google Scholar] [CrossRef]
- Nganso, E.N.; Ngueuteu, M.S.; Yamapi, R.; Filatrella, G.; Kurths, J. Two-attractor chimera and solitary states in a network of nonlocally coupled birhythmic van der Pol oscillators. Chaos Solitons Fractals 2023, 169, 113235. [Google Scholar] [CrossRef]
- Ji, J.C.; Zhang, N. Additive resonances of a controlled van der Pol–Duffing oscillator. J. Sound. Vibrat. 2008, 315, 22–33. [Google Scholar] [CrossRef]
- Chafee, N.A. Bifurcation problem for a functional differential equation of finite retarded type. J. Math. Anal. Appl. 1971, 35, 312–348. [Google Scholar] [CrossRef]
- Feng, C. Oscillatory behavior of the solutions for a Parkinson’s disease model with discrete and distributed delays. Axioms 2024, 13, 75. [Google Scholar] [CrossRef]
- Gopalsamy, K. Stability and Oscillations in Delay Differential Equations of Population Dynamics; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1992. [Google Scholar]
- Ruan, S.G.; Wei, J.J. On the zero of some transcendental function with applications to stability of delay differential equations with two delays. Dyn. Contin. Impuls. Syst. 2003, 10, 863–874. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| μ1 | μ2 | μ3 | μ4 | μ5 | α1 | α2 | α3 | α4 | α5 |
| 0.0045 | 0.0048 | 0.0044 | 0.0046 | 0.0042 | 0.75 | 0.74 | 0.72 | 0.78 | 0.82 |
| β1 | β2 | β3 | β4 | β5 | γ1 | γ2 | γ3 | γ4 | γ5 |
| 0.65 | 0.68 | 0.62 | 0.64 | 0.66 | 0.95 | 0.96 | 0.92 | 0.98 | 0.90 |
| k1 | k2 | k3 | k4 | k5 | a11 | a12 | a13 | a14 | a15 |
| 0.0015 | 0.0018 | 0.0012 | 0.0016 | 0.0014 | 0.82 | −0.88 | 0.85 | −0.86 | 0.84 |
| a21 | a22 | a23 | a24 | a25 | a31 | a32 | a33 | a34 | a35 |
| 1.16 | 1.15 | −1.10 | 1.18 | −1.14 | 0.84 | −0.87 | 0.86 | −0.85 | 0.84 |
| a41 | a42 | a43 | a44 | a45 | a51 | a52 | a53 | a54 | a55 |
| 0.92 | −0.98 | 0.94 | −0.96 | 0.95 | 0.75 | 0.72 | 0.78 | −0.76 | 0.71 |
| p31 | p51 | p71 | p91 | p13 | p53 | p73 | p93 | ||
| 0.76 | −0.78 | 0.72 | 0.90 | 0.35 | −0.32 | 0.34 | 0.30 | ||
| p15 | p35 | p75 | p95 | p17 | p37 | p57 | p97 | ||
| 0.24 | −0.25 | 0.28 | 0.32 | 0.70 | −0.52 | 0.48 | 0.46 | ||
| p19 | p39 | p59 | p79 | ||||||
| 0.52 | −0.45 | 0.48 | 0.42 |
| μ1 | μ2 | μ3 | μ4 | μ5 | μ6 | α1 | α2 | α3 | α4 | α5 | α6 |
| 0.0145 | 0.0148 | 0.0144 | 0.0146 | 0.0142 | 0.0143 | 0.25 | 0.24 | 0.22 | 0.28 | 0.26 | 0.27 |
| β1 | β2 | β3 | β4 | β5 | β6 | γ1 | γ2 | γ3 | γ4 | γ5 | γ6 |
| 1.55 | 1.68 | 1.62 | 1.64 | 1.66 | 1.60 | 2.95 | 2.96 | 2.92 | 2.98 | 2.90 | 2.93 |
| k1 | k2 | k3 | k4 | k5 | k6 | a11 | a12 | a13 | a14 | a15 | a16 |
| 0.15 | 0.18 | 0.12 | 0.16 | 0.14 | 0.17 | 0.12 | −0.38 | 0.15 | −0.36 | 0.14 | 0.13 |
| a21 | a22 | a23 | a24 | a25 | a26 | a31 | a32 | a33 | a34 | a35 | a36 |
| 0.16 | 0.15 | −0.10 | 0.18 | −0.14 | 0.13 | 0.42 | −0.28 | 0.46 | −0.45 | 0.44 | 0.42 |
| a41 | a42 | a43 | a44 | a45 | a46 | a51 | a52 | a53 | a54 | a55 | a56 |
| 0.52 | −0.58 | 0.54 | −0.66 | 0.45 | −0.66 | 0.45 | 0.42 | 0.48 | −0.36 | 0.46 | 0.40 |
| a61 | a62 | a63 | a64 | a65 | a66 | p31 | p51 | p71 | p91 | p111 | |
| 0.72 | −0.74 | 0.70 | 0.68 | −0.62 | 0.66 | 0.78 | −0.75 | 0.72 | 0.70 | 0.74 | |
| p13 | p53 | p73 | p93 | p113 | p15 | p35 | p75 | p95 | p115 | ||
| 0.35 | −0.62 | 0.34 | −0.40 | 0.32 | 0.24 | 0.26 | −0.38 | 0.34 | 0.37 | ||
| p17 | p37 | p57 | p97 | p117 | p19 | p39 | p59 | p79 | p119 | ||
| 0.70 | −0.72 | 0.48 | 0.46 | 0.50 | 0.52 | −0.45 | 0.48 | 0.42 | 0.46 | ||
| p111 | p311 | p511 | p711 | p911 | |||||||
| 0.62 | −0.78 | 0.68 | 0.64 | −0.70 |
| μ1 | μ2 | μ3 | μ4 | μ5 | μ6 | μ7 | ||||||
| 0.0284 | 0.0292 | 0.0295 | 0.0286 | 0.0288 | 0.0283 | 0.0281 | ||||||
| α1 | α2 | α3 | α4 | α5 | α6 | α7 | ||||||
| 0.15 | 0.14 | 0.12 | 0.18 | 0.16 | 0.13 | 0.10 | ||||||
| β1 | β2 | β3 | β4 | β5 | β6 | β7 | ||||||
| 0.65 | 0.68 | 0.62 | 0.64 | 0.66 | 0.60 | 0.65 | ||||||
| γ1 | γ2 | γ3 | γ4 | γ5 | γ6 | γ7 | ||||||
| 3.15 | 3.16 | 3.12 | 3.18 | 3.10 | 3.14 | 3.17 | ||||||
| k1 | k2 | k3 | k4 | k5 | k6 | k7 | ||||||
| 0.015 | 0.020 | 0.012 | 0.016 | 0.018 | 0.013 | 0.014 | ||||||
| a11 | a12 | a13 | a14 | a15 | a16 | a17 | a21 | a22 | a23 | a24 | a25 | a26 |
| 0.34 | −0.46 | 0.45 | −0.26 | 0.42 | 0.33 | −0.37 | 0.36 | 0.35 | −0.39 | 0.38 | −0.34 | 0.35 |
| a27 | a31 | a32 | a33 | a34 | a35 | a36 | a37 | a41 | a42 | a43 | a44 | a45 |
| 0.37 | 0.42 | −0.38 | 0.46 | −0.45 | 0.44 | 0.43 | 0.47 | 0.53 | −0.58 | 0.54 | −0.66 | 0.55 |
| a46 | a47 | a51 | a52 | a53 | a54 | a55 | a56 | a57 | a61 | a62 | a63 | a64 |
| −0.54 | 0.56 | 0.76 | 0.72 | 0.75 | −0.76 | 0.72 | 0.79 | −0.68 | 0.65 | 0.63 | 0.66 | −0.65 |
| a65 | a66 | a67 | a71 | a72 | a73 | a74 | a75 | a76 | a77 | |||
| 0.64 | 0.57 | −0.68 | 0.65 | 0.61 | 0.68 | −0.62 | 0.67 | 0.69 | 0.63 | |||
| p31 | p51 | p71 | p91 | p111 | p131 | p13 | p53 | p73 | p93 | p113 | p133 | |
| 0.70 | 0.78 | −0.76 | 0.73 | 0.74 | 0.68 | 0.36 | −0.32 | 0.30 | −0.40 | 0.36 | −0.38 | |
| p15 | p35 | p75 | p95 | p115 | p135 | p17 | p37 | p57 | p97 | p117 | p137 | |
| 0.26 | −0.52 | −0.46 | 0.43 | 0.41 | 0.44 | 0.72 | −0.64 | 0.63 | 0.65 | 0.64 | 0.53 | |
| p19 | p39 | p59 | p79 | p119 | p139 | p111 | p311 | p5,11 | p7,11 | p9,11 | p13,11 | |
| 0.55 | −0.48 | 0.42 | 0.48 | 0.47 | 0.40 | 0.54 | −0.58 | 0.46 | 0.52 | −0.67 | 0.54 | |
| p1,13 | p3,13 | p5,13 | p7,13 | p9,13 | p11,13 | |||||||
| 0.47 | 0.58 | 0.36 | 0.45 | −0.54 | 0.41 |
| μ1 | μ2 | μ3 | μ4 | μ5 | μ6 | μ7 | μ8 | |||||
| 0.0015 | 0.0012 | 0.0013 | 0.0016 | 0.0018 | 0.0014 | 0.0019 | 0.0017 | |||||
| α1 | α2 | α3 | α4 | α5 | α6 | α7 | α8 | |||||
| 0.55 | 0.54 | 0.52 | 0.58 | 0.56 | 0.53 | 0.60 | 0.62 | |||||
| β1 | β2 | β3 | β4 | β5 | β6 | β7 | β8 | |||||
| 0.95 | 0.98 | 0.92 | 0.94 | 0.96 | 0.93 | 0.97 | 0.91 | |||||
| γ1 | γ2 | γ3 | γ4 | γ5 | γ6 | γ7 | γ8 | |||||
| 2.55 | 2.56 | 2.52 | 2.58 | 2.50 | 2.54 | 2.57 | 2.60 | |||||
| k1 | k2 | k3 | k4 | k5 | k6 | k7 | k8 | |||||
| 0.006 | 0.003 | 0.007 | 0.004 | 0.008 | 0.009 | 0.004 | 0.005 | |||||
| a11 | a12 | a13 | a14 | a15 | a16 | a17 | a18 | a21 | a22 | a23 | a24 | a25 |
| 0.41 | 0.48 | 0.45 | 0.46 | 0.44 | 0.43 | 0.47 | 0.50 | 0.46 | −0.58 | 0.40 | 0.48 | 0.55 |
| a26 | a27 | a28 | a31 | a32 | a33 | a34 | a35 | a36 | a37 | a38 | a41 | a42 |
| −0.65 | 0.57 | 0.67 | 0.72 | −0.78 | 0.76 | −0.76 | 0.74 | −0.72 | 0.78 | 0.75 | 0.62 | −0.72 |
| a43 | a44 | a45 | a46 | a47 | a48 | a51 | a52 | a53 | a54 | a55 | a56 | a57 |
| 0.34 | −0.46 | −0.55 | −0.73 | 0.77 | 0.42 | 0.65 | 0.62 | 0.81 | −0.56 | 0.82 | 0.47 | −0.65 |
| a58 | a61 | a62 | a63 | a64 | a65 | a66 | a67 | a68 | a71 | a72 | a73 | a74 |
| 0.54 | 0.55 | 0.52 | 0.58 | −0.54 | 0.61 | 0.57 | −0.86 | 0.63 | 0.45 | 0.42 | 0.48 | −0.46 |
| a75 | a76 | a77 | a78 | a81 | a82 | a83 | a84 | a86 | a87 | a88 | ||
| 0.52 | 0.47 | 0.57 | 0.50 | 0.65 | 0.64 | 0.61 | −0.35 | 0.68 | 0.65 | −0.54 | ||
| p31 | p51 | p71 | p91 | p111 | p131 | p151 | p13 | p53 | p73 | p93 | p113 | p133 |
| 0.76 | −0.78 | 0.82 | 0.80 | 0.81 | 0.75 | 0.71 | 0.45 | 0.32 | 0.41 | −0.54 | −0.54 | 0.46 |
| p153 | p15 | p35 | p75 | p95 | p115 | p135 | p155 | p17 | p37 | p57 | p97 | p117 |
| 0.55 | 0.54 | −0.65 | 0.48 | 0.52 | 0.57 | −0.58 | 0.54 | −0.72 | 0.78 | −0.68 | −0.76 | 0.72 |
| p137 | p157 | p19 | p39 | p59 | p79 | p119 | p139 | p159 | p11 | p311 | p511 | p711 |
| −0.46 | 0.38 | 0.62 | −0.45 | 0.48 | 0.42 | 0.56 | 0.51 | 0.36 | 0.35 | −0.48 | 0.58 | 0.54 |
| p911 | p1311 | p1511 | p1,13 | p3,13 | p5,13 | p7,13 | p9,13 | p11,13 | p15,13 | p1,15 | p3,15 | p5,15 |
| −0.68 | 0.44 | 0.48 | 0.55 | 0.42 | −0.44 | 0.46 | −0.48 | 0.50 | 0.50 | 0.55 | −0.52 | 0.56 |
| p7,15 | p9,15 | p11,15 | p13,15 | |||||||||
| 0.54 | −0.44 | 0.48 | 0.40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, C. Periodic Oscillatory Solutions for a Nonlinear Model with Multiple Delays. Mathematics 2025, 13, 2275. https://doi.org/10.3390/math13142275
Feng C. Periodic Oscillatory Solutions for a Nonlinear Model with Multiple Delays. Mathematics. 2025; 13(14):2275. https://doi.org/10.3390/math13142275
Chicago/Turabian StyleFeng, Chunhua. 2025. "Periodic Oscillatory Solutions for a Nonlinear Model with Multiple Delays" Mathematics 13, no. 14: 2275. https://doi.org/10.3390/math13142275
APA StyleFeng, C. (2025). Periodic Oscillatory Solutions for a Nonlinear Model with Multiple Delays. Mathematics, 13(14), 2275. https://doi.org/10.3390/math13142275