
Dynamics of a Class of Extended Duffing–Van Der Pol Oscillators: Melnikov’s Approach, Simulations, Control over Oscillations

 ,
,  ,
,  , ,
, ,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The New Model
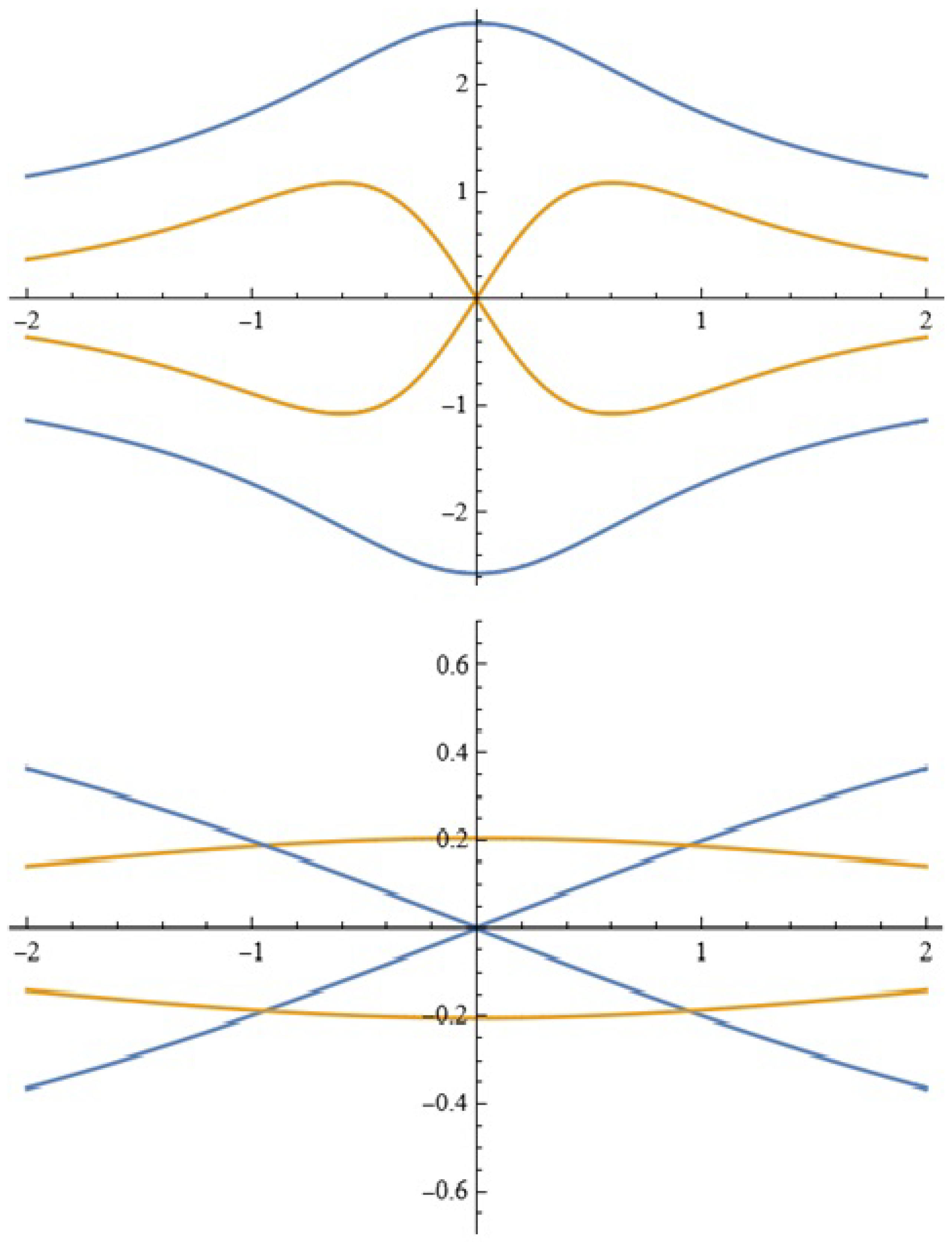
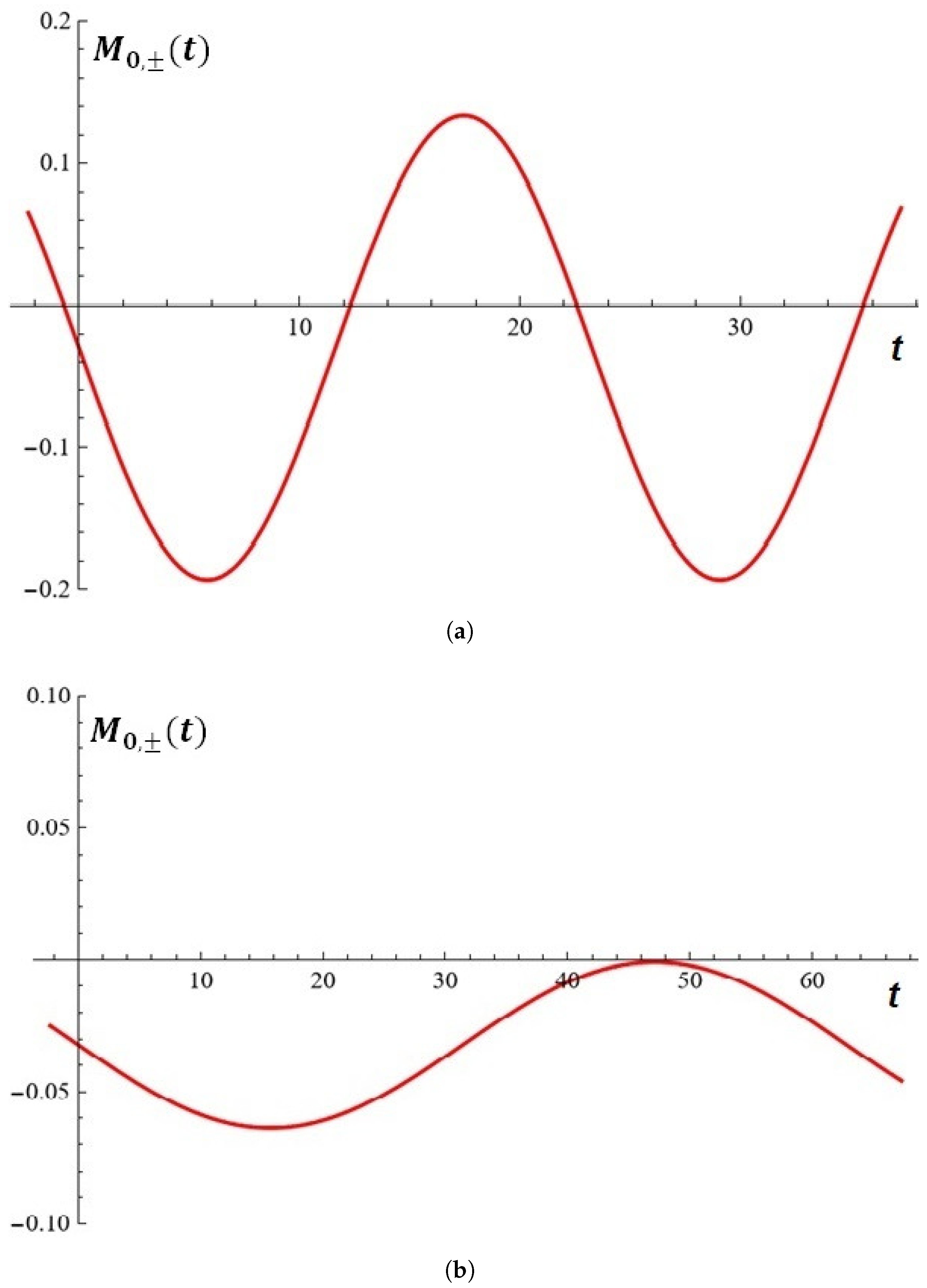
Considerations in the Light of Melnikov’s Approach
- Melnikov’s criterion for the occurrence of the intersection between the disturbed and unperturbed separatrices for a fixed N can be formulated by the reader. In this case, the explicit representation of (moreover, for high values of the parameter N) is laborious. In order to employ specialized modules provided in current computer algebraic systems for scientific study, the user should first conduct a series of preparatory operations on the integrals as previously stated.
- Prior to that, while calculating the integral (8), it is convenient to adopt the following representation: .
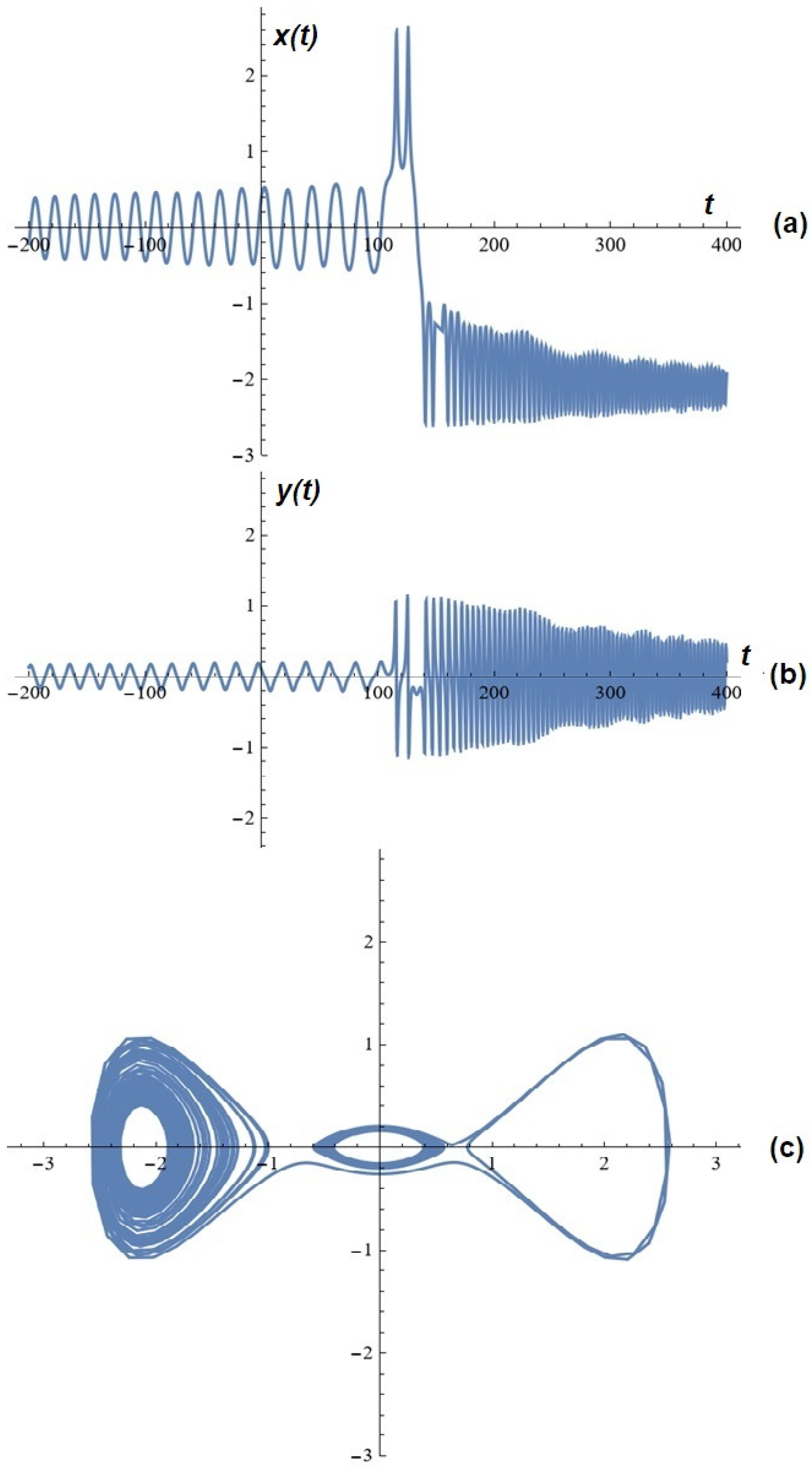
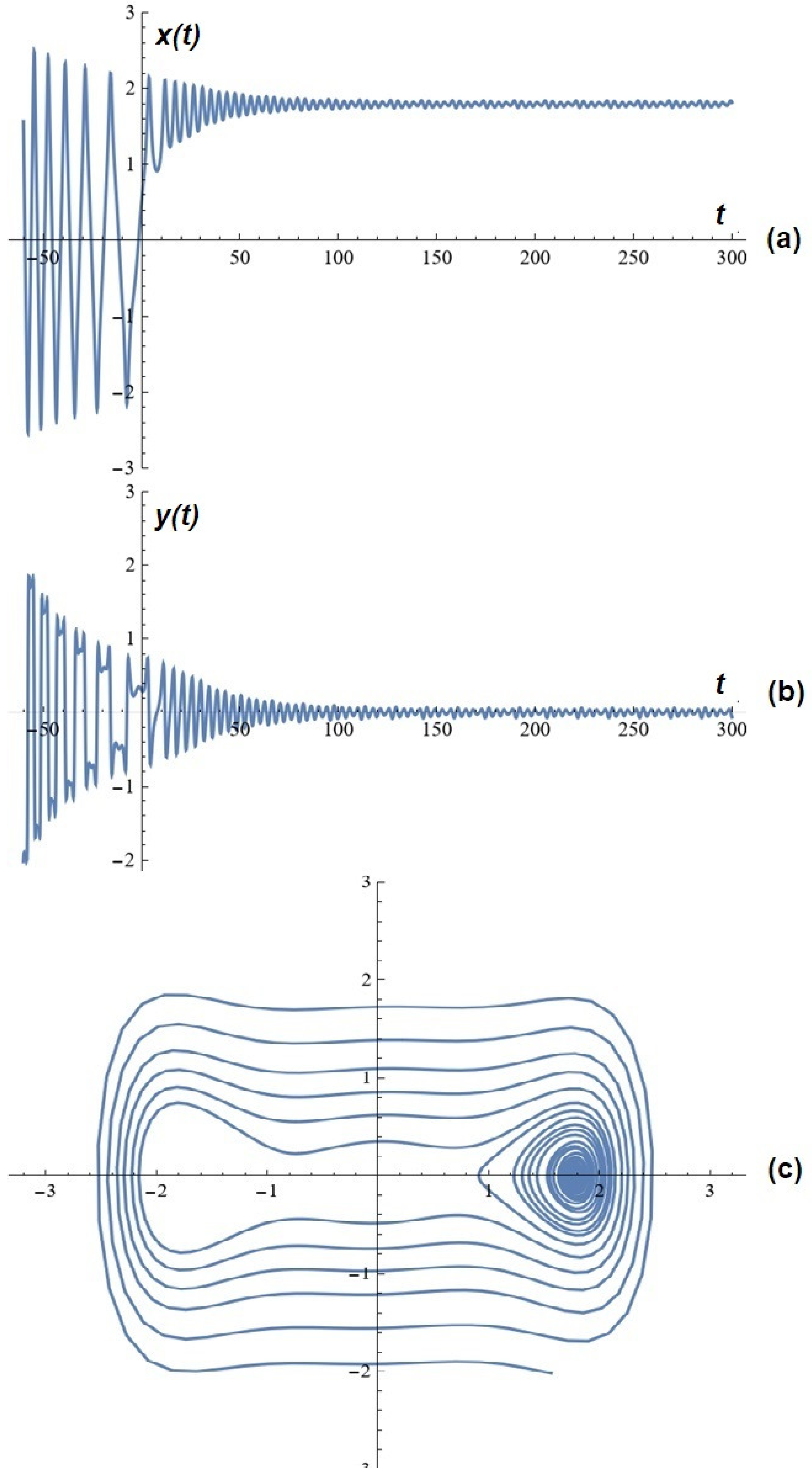
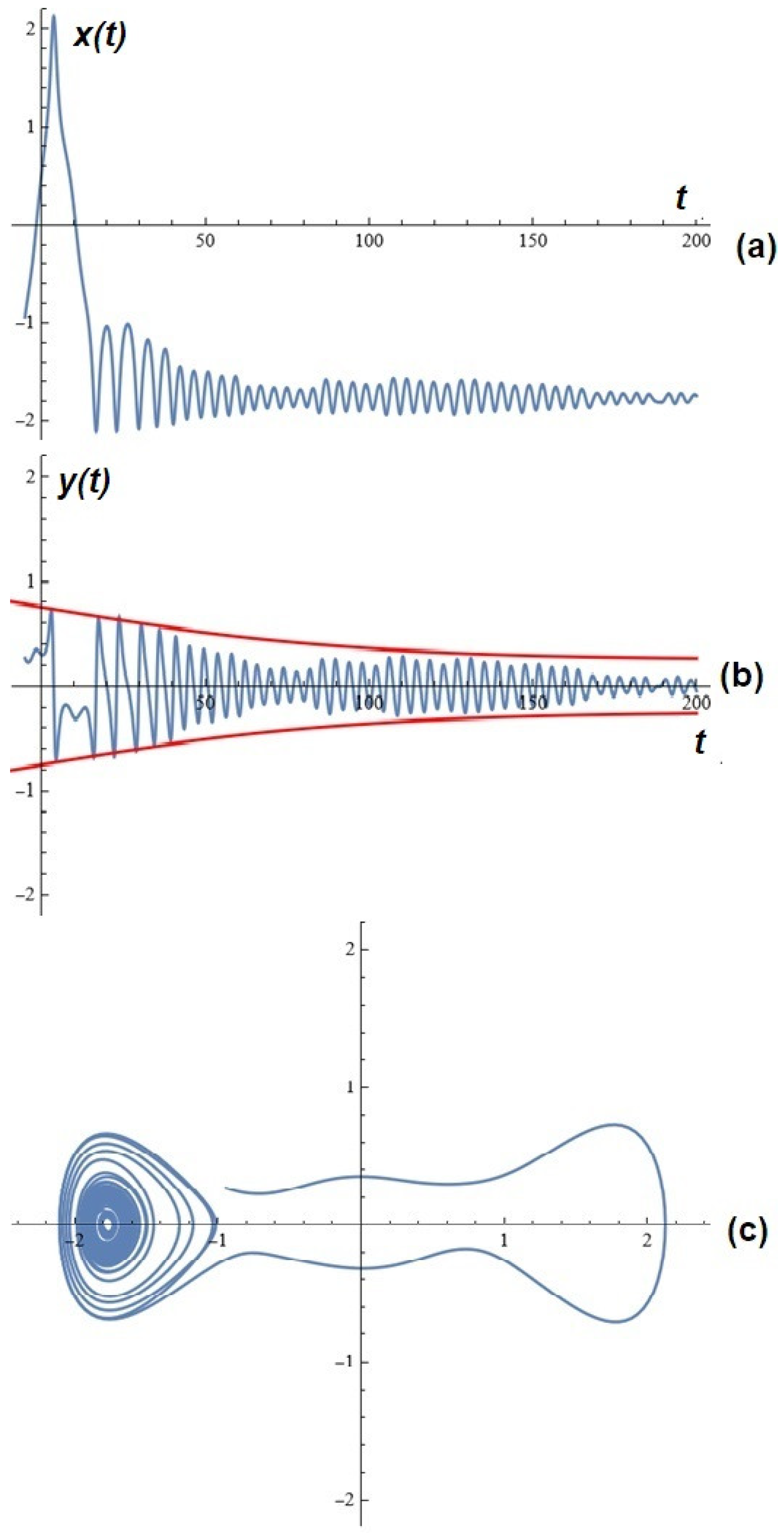
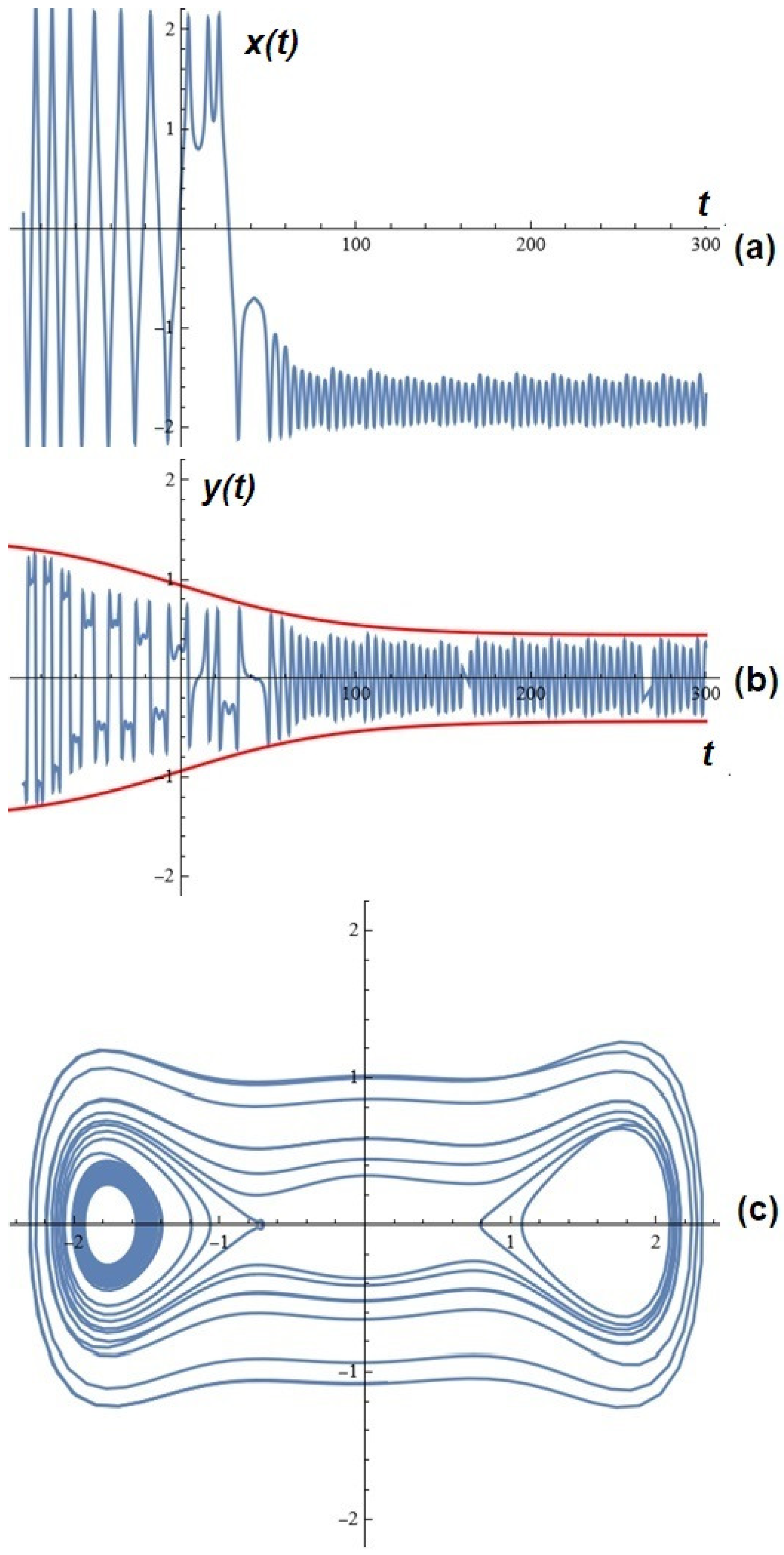
3. A Few Simulations
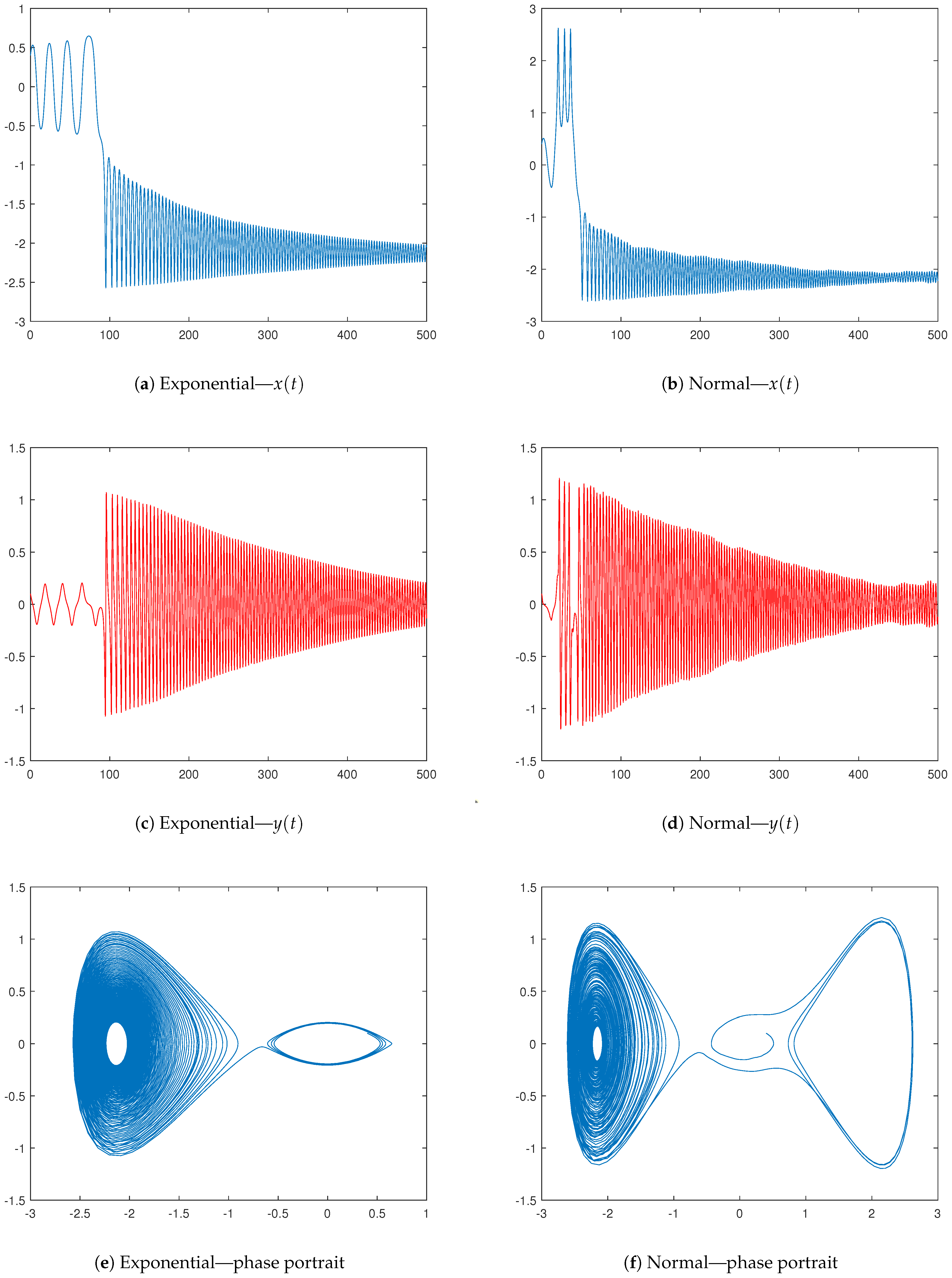
4. Potential Control over Oscillations
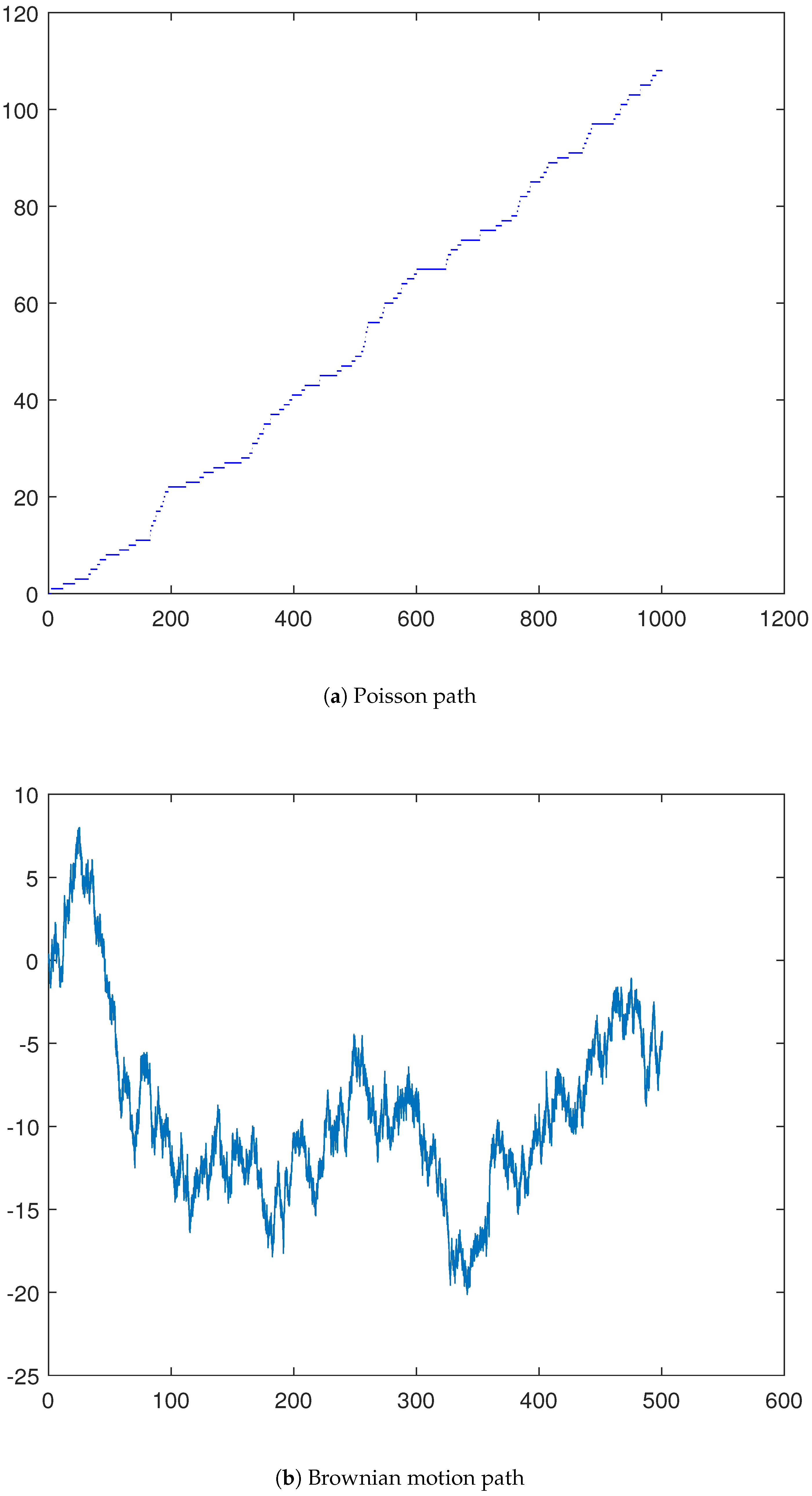
Some Probabilistic Constructions
5. Concluding Remarks and Further Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Boissonade, J.; De Kepper, P. Transitions from bistability to limit cycle oscillations. Theoretical analysis and experimental evidence in an open chemical system. J. Phys. Chem. 1980, 84, 501–506. [Google Scholar] [CrossRef]
- Zhabotinskii, A.M. Biological and Biochemical Oscillators; Academic Press: New York, NY, USA, 1972. [Google Scholar]
- Epstein, I.R.; Showalter, K. Nonlinear chemical dynamics: Oscillations, patterns, and chaos. J. Phys. Chem. 1996, 100, 13132–13147. [Google Scholar] [CrossRef]
- Belousov, B.P. Oscillations and Travelling Waves in Chemical Systems; Wiley: New York, NY, USA, 1985. [Google Scholar]
- Zhabotinsky, A.M.; Buchholtz, F.; Kiyatkin, A.B.; Epstein, I.R. Oscillations and waves in metal-ion-catalyzed bromate oscillating reactions in highly oxidized states. J. Phys. Chem. 1993, 97, 7578–7584. [Google Scholar] [CrossRef]
- Zhang, D.; Gyorgyi, L.; Peltier, W.R. Deterministic chaos in the Belousov-Zhabotinsky reaction: Experiments and simulations. Chaos 1993, 3, 723–745. [Google Scholar] [CrossRef]
- Ali, F.; Menzinger, M. Stirring effects and phase-dependent inhomogeneity in chemical oscillations: The Belousov-Zhabotinsky reaction in a CSTR. J. Phys. Chem. A 1997, 101, 2304–2309. [Google Scholar] [CrossRef]
- Bartuccelli, M.; Gentile, G.; Wright, J.A. Stable dynamics in forced systems with sufficiently high/low forcing frequency. Chaos 2016, 26, 083108. [Google Scholar] [CrossRef]
- Maaita, J.O.; Kyprianidis, I.M.; Volos, C.K.; Meletlidou, E. The study of a nonlinear duffing–type oscillator driven by two voltage sources. J. Eng. Sci. Technol. Rev. 2013, 6, 74–80. [Google Scholar] [CrossRef]
- Ott, E.; Grebogi, C.; Yorke, J.A. Controlling chaos. Phys. Rev. Lett. 1990, 64, 1196. [Google Scholar] [CrossRef]
- Ariaratnam, S.T.; Xie, W.C. Almost-sure stochastic stability of coupled non-linear oscillators. Int. J. Non-Linear Mech. 1994, 29, 197–204. [Google Scholar] [CrossRef]
- Kloeden, P.E.; Platen, E. Numerical Solution of Stochastic Differential Equations; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Lin, H.; Yim, S.C.S. Analysis of a nonlinear system exhibiting chaotic, noisy chaotic and random behaviors. J. Appl. Mech. 1996, 63, 509–516. [Google Scholar] [CrossRef]
- Liu, W.Y.; Zhu, W.Q.; Huang, Z.L. Effect of bounded noise on chaotic motion of duffing oscillator under parametric excitation. Chaos Solitons Fractals 2001, 12, 527–537. [Google Scholar] [CrossRef]
- Lin, Y.K.; Cai, G.Q. Probabilistic Structural Dynamics: Advanced Theory and Applications; McGraw-Hill College: New York, NY, USA, 1995. [Google Scholar]
- Miwadinou, C.H.; Monwanou, A.V.; Yovogan, J.; Hinvi, L.A.; Tuwa, P.N.; Orou, J.C. Modeling nonlinear dissipative chemical dynamics by a forced modified Van der Pol-Duffing oscillator with asymmetric potential: Chaotic behaviors predictions. Chin. J. Phys. 2018, 56, 1089–1104. [Google Scholar] [CrossRef]
- Miwadinou, C.H.; Monwanou, A.V.; Hinvi, L.A.; Koukpemedji, A.A.; Ainamon, C.; Chabi Orou, J.B. Melnikov chaos in a modified Rayleigh-Duffing oscillator with ϕ6 potential. Int. J. Bifurc. Chaos 2016, 26, 1650085. [Google Scholar] [CrossRef]
- Ainamon, C.; Miwadinou, C.H.; Monwanou, A.V.; Orou, J.C. Analysis of multiresonance and chaotic behavior of the polarization in materials modeled by a duffing equation with multifrequency excitations. Appl. Phys. Res. 2014, 6, 74–86. [Google Scholar] [CrossRef]
- Miwadinou, C.H.; Monwanou, A.V.; Orou, J.B. Active control of the parametric resonance in the modified Rayleigh-Duffing oscillator. Afr. Rev. Phys. 2014, 9, 227–235. [Google Scholar]
- Miwadinou, C.H.; Monwanou, A.V.; Orou, J.B. Effect of nonlinear dissipation on the basin boundaries of a driven two-well modified Rayleigh-Duffing oscillator. Int. J. Bifurc. Chaos 2015, 25, 1550024. [Google Scholar] [CrossRef]
- Miwadinou, C.H.; Hinvi, A.L.; Monwanou, A.V.; Orou, J.B. Nonlinear dynamics of a ϕ6 modified duffing oscillator: Resonant oscillations and transition to chaos. Nonlinear Dyn. 2017, 88, 97–113. [Google Scholar] [CrossRef]
- Adéchinan, A.J.; Kpomahou, Y.J.F.; Hinvi, L.A.; Miwadinou, C.H. Chaos, coexisting attractors and chaos control in a nonlinear dissipative chemical oscillator. Chin. J. Phys. 2022, 77, 2694–2697. [Google Scholar] [CrossRef]
- Adéchinan, J.A.; Kpomahou, Y.J.F.; Miwadinou, C.H.; Hinvi, L.A. Dynamics and active control of chemical oscillations modeled as a forced generalized Rayleigh oscillator with asymmetric potential. Int. J. Basic Appl. Sci. 2021, 10, 20–31. [Google Scholar]
- Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. Dynamics of a class of chemical oscillators with asymmetry potential: Simulations and control over oscillations. Mathematics 2025, 13, 1129. [Google Scholar] [CrossRef]
- Yu, J.; Li, J. Investigation on dynamics of the extended Duffing-Van der Pol system. Z. Naturforsch. A 2009, 64, 341–346. [Google Scholar] [CrossRef]
- Lei, Y.; Xu, W.; Xu, Y.; Fang, T. Chaos control by harmonic excitation with proper random phase. Chaos Solitons Fractals 2004, 21, 1175–1181. [Google Scholar] [CrossRef]
- Xu, Y.; Mahmoud, G.M.; Xu, W.; Lei, Y. Suppressing chaos of a complex Duffing’s system using a random phase. Chaos Solitons Fractals 2005, 23, 265–273. [Google Scholar] [CrossRef]
- Kadhim, I.J.; Yasir, A.A. Lyapunov stability, parallelizablity, and symmetry of random dynamical systems. Symmetry 2025, 17, 325. [Google Scholar] [CrossRef]
- Arnold, L.; Schmalfuss, B. Lyapunov’s second method for random dynamical systems. J. Differ. Eq. 2001, 177, 235–265. [Google Scholar] [CrossRef]
- Lukashiv, T.; Litvinchuk, Y.; Malyk, I.V.; Golebiewska, A.; Nazarov, P.V. Stabilization of stochastic dynamical systems of a random structure with Markov switches and Poisson perturbations. Mathematics 2023, 11, 582. [Google Scholar] [CrossRef]
- Chueshov, I. Monotone Random Systems Theory and Applications; Springer: Heidelberg, Germany, 2002. [Google Scholar]
- Molchanov, I. Theory of Random Sets; Springer: London, UK, 2005. [Google Scholar]
- Alkhrayfawee, N.G.; Kadhim, I.J.; Albukhuttar, A.N. P- Omega limit set in random dynamical systems. J. Phys. Conf. Ser. 2022, 2322, 012041. [Google Scholar] [CrossRef]
- Wei, J.G.; Leng, G. Lyapunov exponent and chaos of Duffing’s equation perturbed by white noise. Appl. Math. Comput. 1997, 88, 77–93. [Google Scholar] [CrossRef]
- Kumar, P.; Narayanan, S.; Gupta, S. Stochastic bifurcations in a vibro-impact Duffing–Van der Pol oscillator. Nonlinear Dyn. 2016, 85, 439–452. [Google Scholar] [CrossRef]
- Abdullah, N.; Kadhim, I.J.; Kadhim, A.N. Attraction properties and asymptotically equivalent of random dynamical system. Int. J. Mech. Eng. 2022, 7, 3674–3680. [Google Scholar]
- Li, Z.G.; Xu, W.; Zhang, X.Y. Analysis of chaotic behavior in the extended duffing–van der Pol system subject to additive non-symmetry biharmonical excitation. Appl. Math. Comput. 2006, 183, 858–871. [Google Scholar] [CrossRef]
- Lenci, S.; Menditto, G.; Tarantino, A.M. Homoclinic and heteroclinic bifurcations in the non-linear dynamics of a beam resting on an elastic substrate. Int. J. Non-Linear Mech. 1999, 34, 615–632. [Google Scholar] [CrossRef]
- Hu, S.; Zhou, L. Chaotic dynamics of an extended Duffing-van der Pol system with a non-smooth perturbation and parametric excitation. Z. Naturforsch. A 2023, 78, 1015–1030. [Google Scholar] [CrossRef]
- Melnikov, V.K. On the stability of a center for time–periodic perturbation. Trans. Mosc. Math. Soc. 1963, 12, 3–52. [Google Scholar]
- Golev, A.; Terzieva, T.; Iliev, A.; Rahnev, A.; Kyurkchiev, N. Simulation on a generalized oscillator model: Web-based application. C. R. L’Acad. Bulg. Sci. 2024, 77, 230–237. [Google Scholar] [CrossRef]
- Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. Modeling of some classes of extended oscillators: Simulations, algorithms, generating chaos, and open problems. Algorithms 2024, 17, 121. [Google Scholar] [CrossRef]
- Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. Generating chaos in dynamical systems: Applications, symmetry results, and stimulating examples. Symmetry 2024, 16, 938. [Google Scholar] [CrossRef]
- Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. Notes on modified planar Kelvin-Stuart models: Simulations, applications, probabilistic control on the perturbations. Axioms 2024, 13, 720. [Google Scholar] [CrossRef]
- Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Branzov, T.; Kyurkchiev, V.; Rahnev, A. Dynamics of Some Perturbed Morse-Type Oscillators: Simulations and Applications. Mathematics 2024, 12, 3368. [Google Scholar] [CrossRef]
- Kyurkchiev, N.; Zaevski, T.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. Investigations of modified classical dynamical models: Melnikov’s approach, simulations and applications, and probabilistic control of perturbations. Mathematics 2025, 13, 231. [Google Scholar] [CrossRef]
- Kyurkchiev, N.; Iliev, A.; Kyurkchiev, V.; Rahnev, A. One more thing on the subject: Generating chaos via x|x|a-1, Melnikov’s approach using simulations. Mathematics 2025, 12, 232. [Google Scholar] [CrossRef]
- Ullah, M.; Behl, R.; Argyros, I. Some high-order iterative methods for nonlinear models originating from real life problems. Mathematics 2020, 8, 1249. [Google Scholar] [CrossRef]
- Argyros, I.K.; Sharma, D.; Argyros, C.I.; Parhi, S.K.; Sunanda, S.K. A family of fifth and sixth convergence order methods for nonlinear models. Symmetry 2021, 13, 715. [Google Scholar] [CrossRef]
- Kumar, S.; Bhagwan, J.; Jäntschi, L. Optimal derivative-free one-point algorithms for computing multiple zeros of nonlinear equations. Symmetry 2022, 14, 1881. [Google Scholar] [CrossRef]
- Shams, M.; Kausar, N.; Araci, S.; Oros, G.I. Artificial hybrid neural network-based simultaneous scheme for solving nonlinear equations: Applications in engineering. Alex. Eng. J. 2024, 108, 292–305. [Google Scholar] [CrossRef]
- Sprott, J.C. A proposed standard for the publication of new chaotic systems. Int. J. Bifurcat. Chaos 2011, 21, 2391–2394. [Google Scholar] [CrossRef]
- Petavratzis, E.; Moysis, L.; Volos, C.; Stouboulos, I.; Nistazakis, H.; Valavanis, K. A chaotic path planning generator enhanced by a memory technique. Robot. Auton. Syst. 2021, 143, 103826. [Google Scholar] [CrossRef]
- Messias, M.; Cândido, M.R. Analytical results on the existence of periodic orbits and canard-type invariant torus in a simple dissipative oscillator. Chaos Solitons Fractals 2024, 182, 114845. [Google Scholar] [CrossRef]
- Sethu Meenakshi, M.V.; Athisayanathan, S.; Chinnathambi, V.; Rajasekar, S. Analytical estimates of the effect of amplitude modulated signal in nonlinearly damped Duffing-vander pol oscillator. Chin. J. Phys. 2017, 55, 2208–2217. [Google Scholar] [CrossRef]
- Simiu, E. Chaotic Transitions in Deterministic and Stochastic Dynamical Systems: Applications of Melnikov Processes in Engineering, Physics, and Neuroscience; Princeton University Press: Princeton, NJ, USA, 2002. [Google Scholar]
- Kuehn, C.; Longo, I. Estimating Rate-Induced Tipping via Asymptotic Series and a Melnikov-like Method. arXiv 2022, arXiv:2011.04031v2. [Google Scholar] [CrossRef]
- Ashwin, P.; Perryman, C.; Wieczorek, S. Parameter Shifts for Nonautonomous Systems in Low Dimension: Bifurcation and Rate-Induced Tipping. Nonlinearity 2017, 30, 2185–2210. [Google Scholar] [CrossRef]
- Ashwin, P.; Wieczorek, S.; Vitolo, R.; Cox, P. Tipping Points in Open Systems: Bifurcation, Noise-Induced and Rate-Dependent Examples in the Climate System. Philos. Trans. R. Soc. A 2012, 370, 1166–1184. [Google Scholar] [CrossRef] [PubMed]
- Wieczorek, S.; Xie, C.; Ashwin, P. Rate-Induced Tipping: Thresholds, Edge States and Connecting Orbits. Nonlinearity 2023, 36, 3238–3293. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyurkchiev, N.; Zaevski, T.; Vasileva, M.; Kyurkchiev, V.; Iliev, A.; Rahnev, A. Dynamics of a Class of Extended Duffing–Van Der Pol Oscillators: Melnikov’s Approach, Simulations, Control over Oscillations. Mathematics 2025, 13, 2240. https://doi.org/10.3390/math13142240
Kyurkchiev N, Zaevski T, Vasileva M, Kyurkchiev V, Iliev A, Rahnev A. Dynamics of a Class of Extended Duffing–Van Der Pol Oscillators: Melnikov’s Approach, Simulations, Control over Oscillations. Mathematics. 2025; 13(14):2240. https://doi.org/10.3390/math13142240
Chicago/Turabian StyleKyurkchiev, Nikolay, Tsvetelin Zaevski, Maria Vasileva, Vesselin Kyurkchiev, Anton Iliev, and Asen Rahnev. 2025. "Dynamics of a Class of Extended Duffing–Van Der Pol Oscillators: Melnikov’s Approach, Simulations, Control over Oscillations" Mathematics 13, no. 14: 2240. https://doi.org/10.3390/math13142240
APA StyleKyurkchiev, N., Zaevski, T., Vasileva, M., Kyurkchiev, V., Iliev, A., & Rahnev, A. (2025). Dynamics of a Class of Extended Duffing–Van Der Pol Oscillators: Melnikov’s Approach, Simulations, Control over Oscillations. Mathematics, 13(14), 2240. https://doi.org/10.3390/math13142240