
ED-SA-ConvLSTM: A Novel Spatiotemporal Prediction Model and Its Application in Ionospheric TEC Prediction


Abstract
1. Introduction
2. Data and Data Processing
3. Methodology
3.1. SA-ConvLSTM
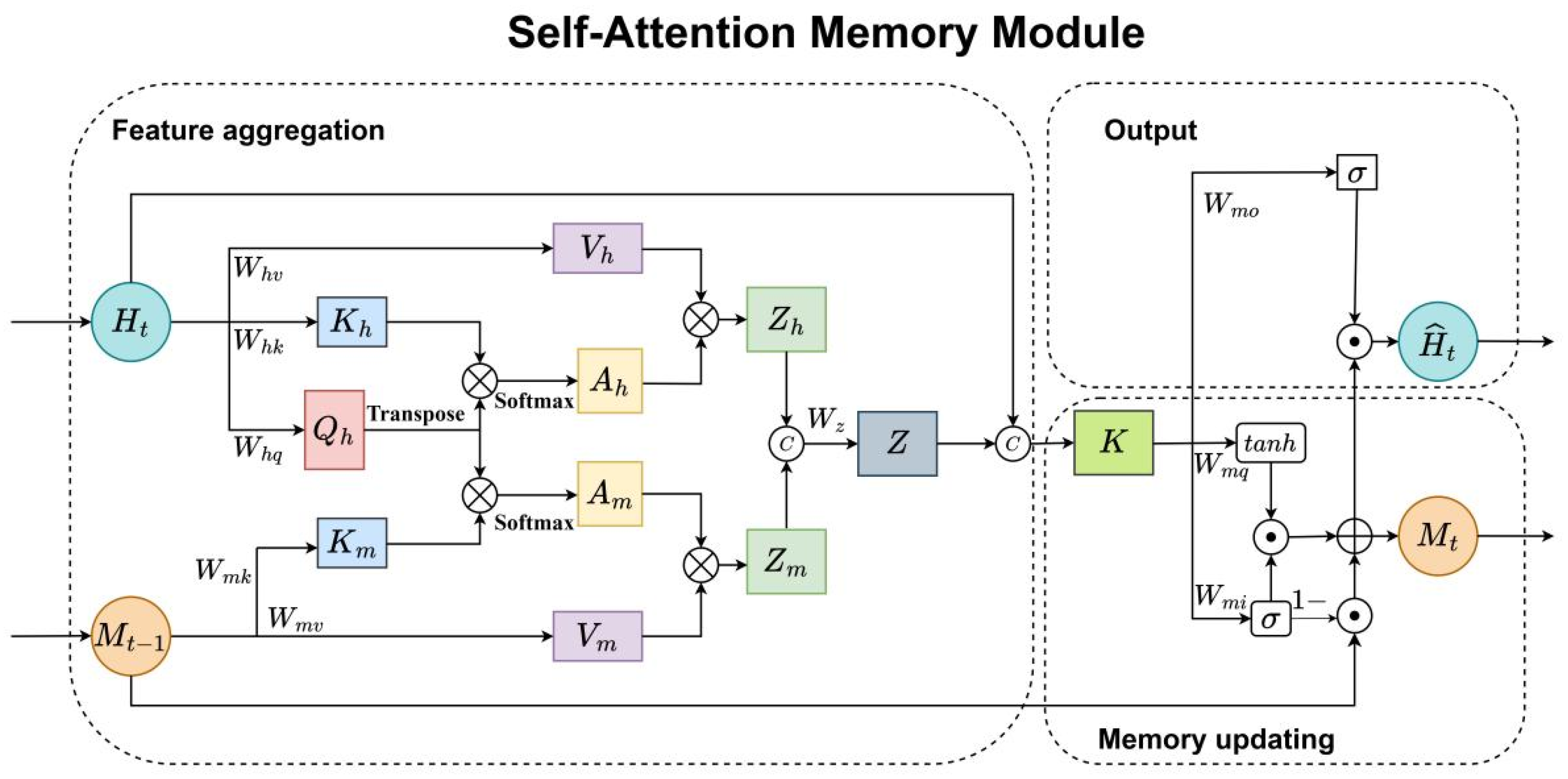
3.1.1. Self-Attention Memory (SAM) Module
- ●
- Feature aggregation: This part first weights to the features of the current time step . It obtained by applying self-attention to . And the long-range spatial memory features is calculated using and similarity score . Finally, and are aggregated into . The calculation of weighted features and are shown in Equations (2) and (3), respectively.The weighted current feature and the weighted long-range memory state are connected to obtain the aggregated feature . The calculation is as follows:In Equations (2)–(4), is the hidden layer feature at the current time step, is the long-range spatial memory from the previous step, , , , , and , are weight matrices, while , , , , and are the intermediate vectors that help to calculate the attention scores of and , and denotes vector concatenation.
- ●
- Memory updating: The function of memory updating is to update the long-range spatial memory adaptively. The aggregated and the hidden layer feature of the current time step are connected to form . The calculations are shown in Equation (5):where * denotes convolution, and ⨀ represents the Hadamard product.
- ●
- Output: The output part ultimately generates a new using a dot product between the output gate and update memory . Its calculation is as follows:
3.1.2. SA-ConvLSTM Unit
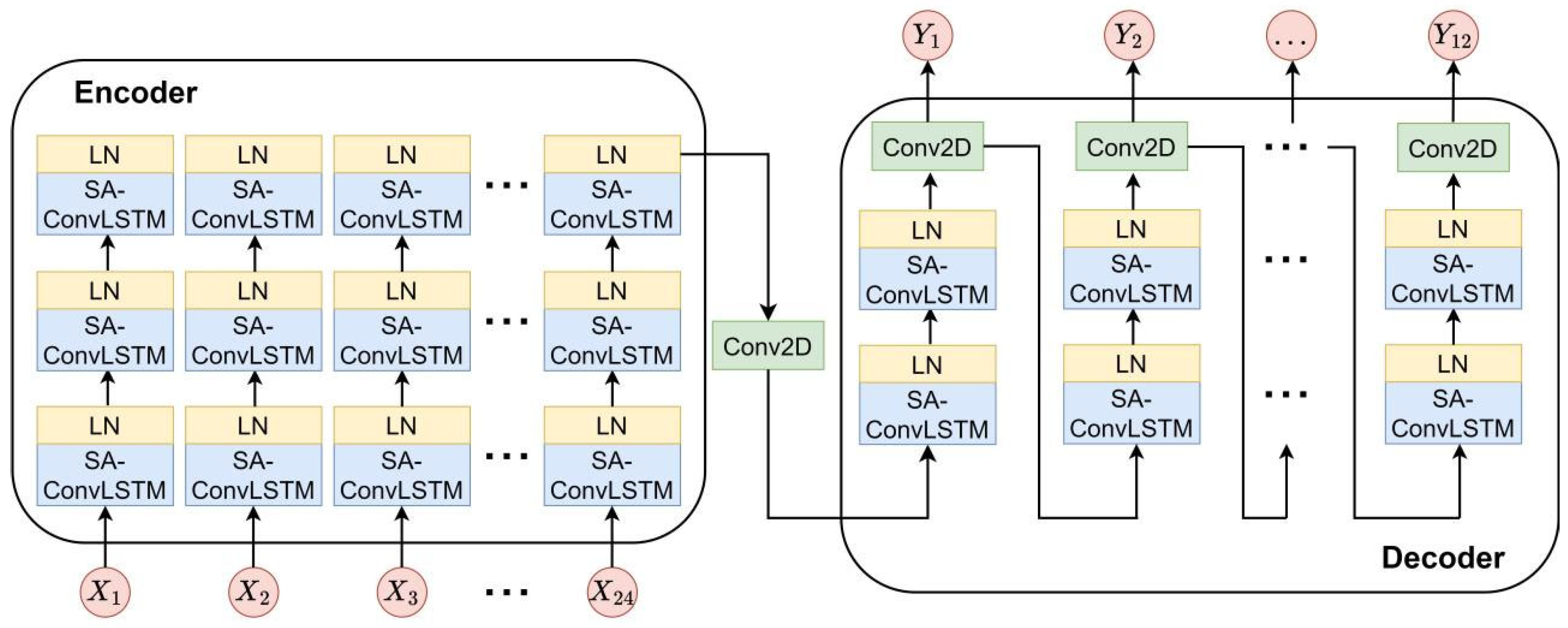
3.2. The Proposed ED-SA-ConvLSTM
3.3. Evaluation Metrics
4. Experimental Results
4.1. Model Optimization
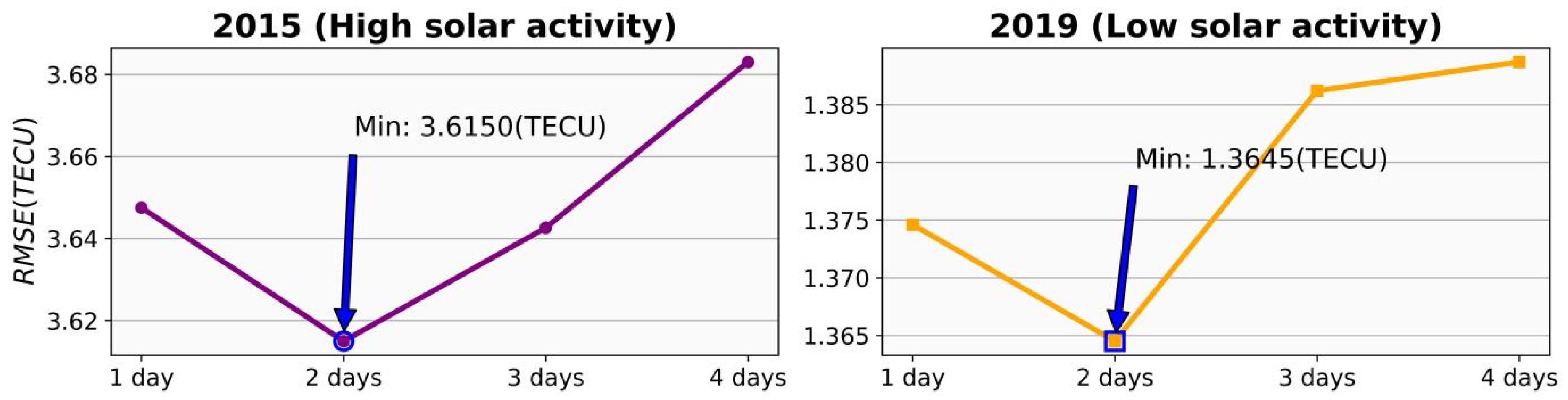
4.2. The Input Length
4.3. Ablation Experiment
4.4. Comparison with Other Models
4.4.1. Overall Quantitative Comparison
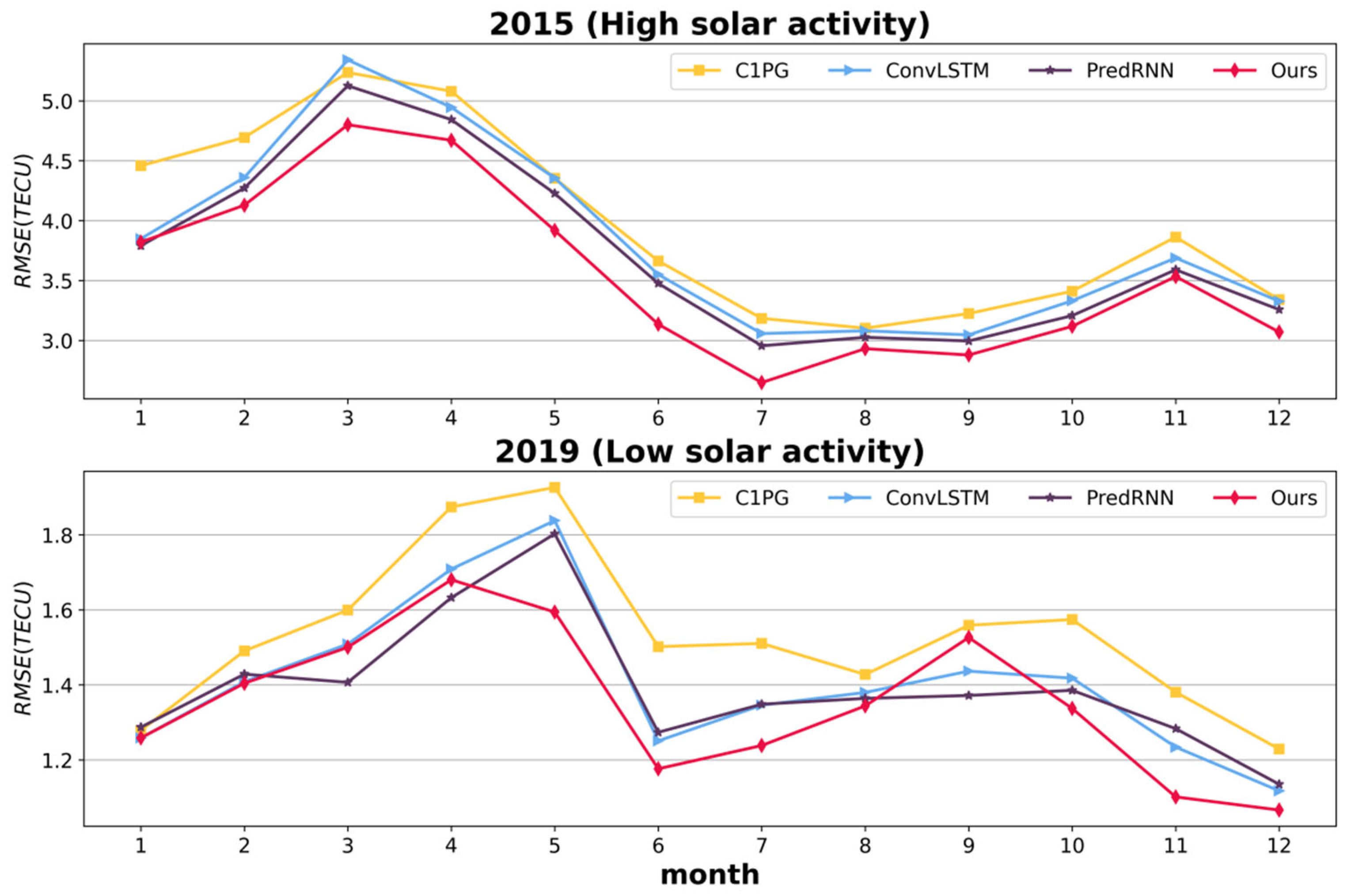
4.4.2. Comparison in Different Months
4.4.3. Comparison at Different Latitude Regions
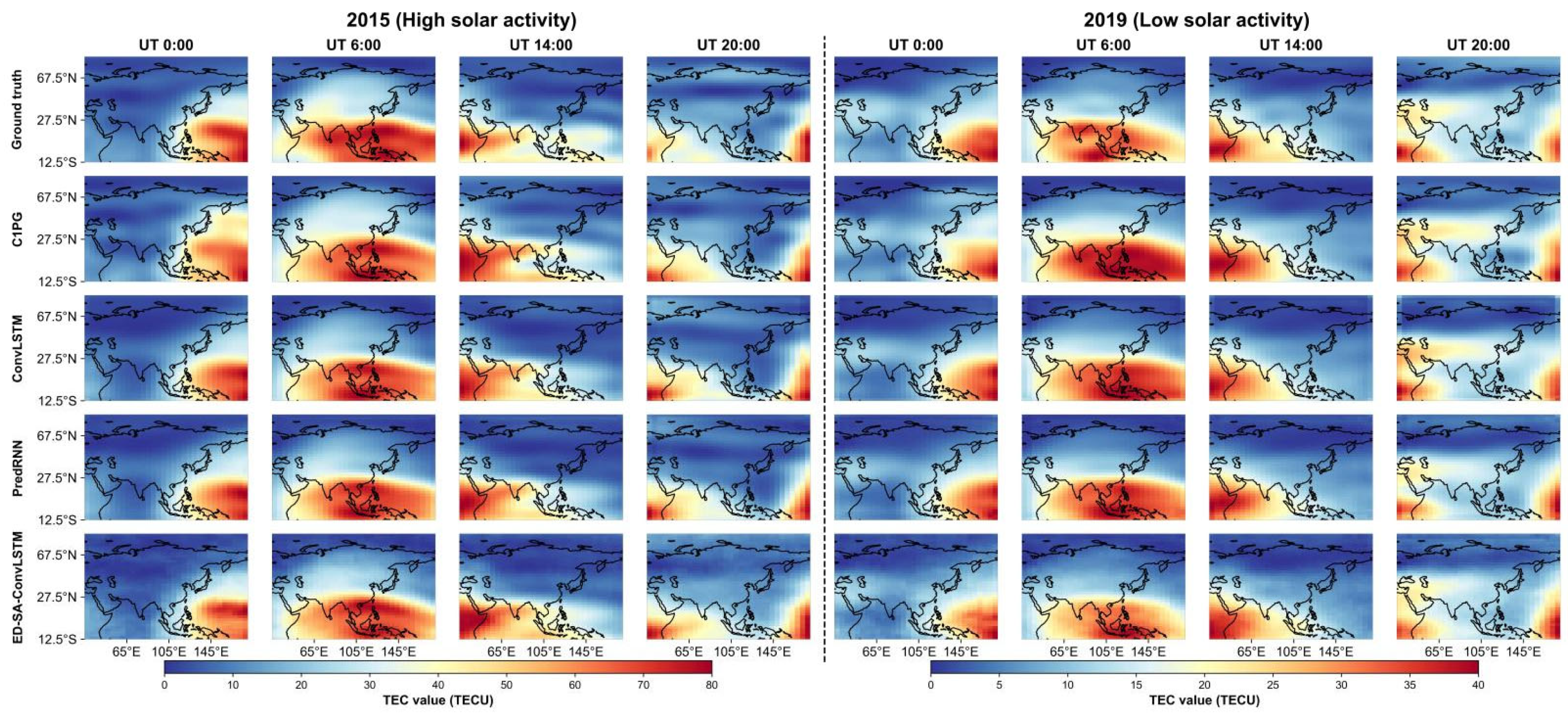
4.4.4. Visual Effects of Various Models
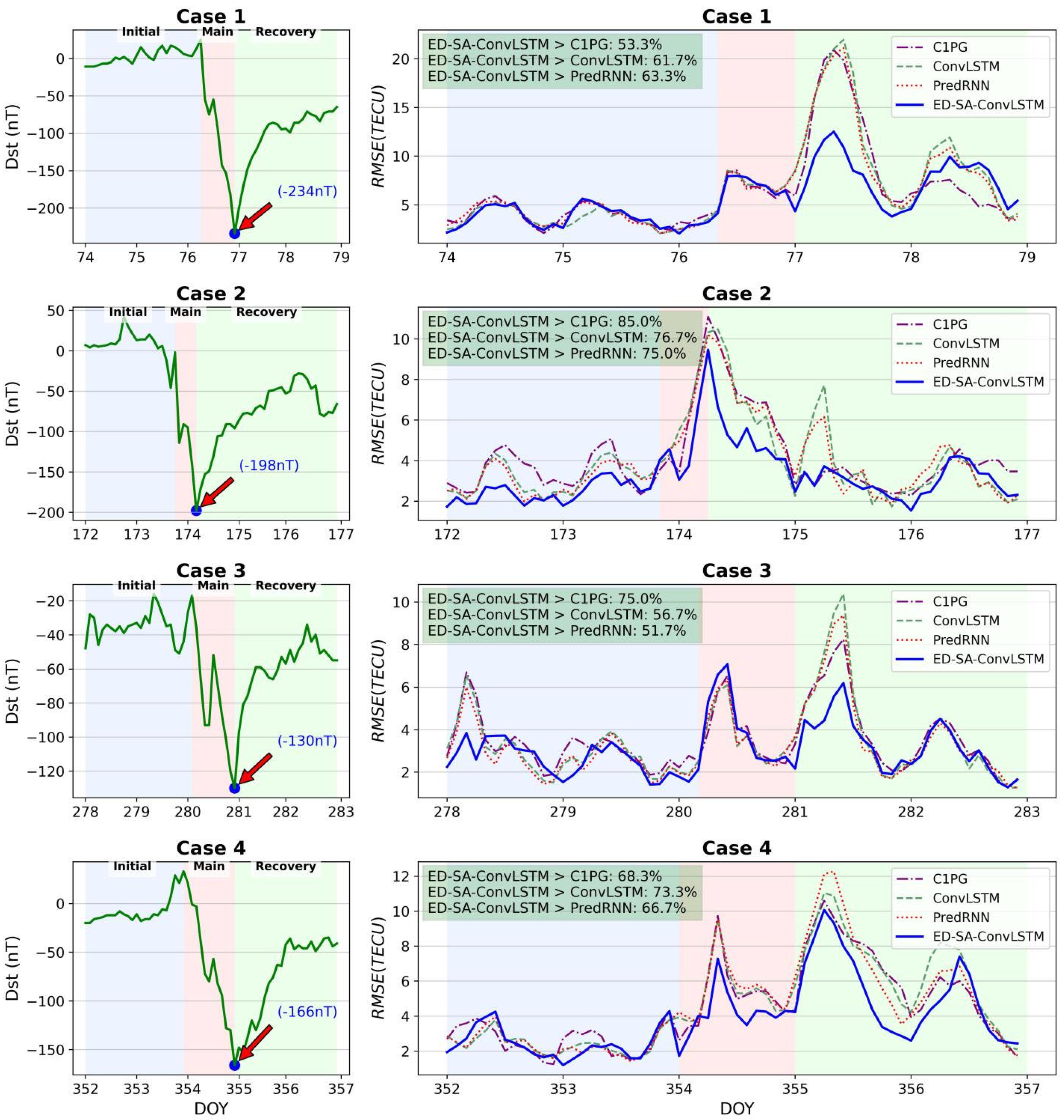
4.5. Comparison Under Extreme Situations
4.6. Comparison Under Other Test Sets
4.7. Comparison of Computational Time and Memory Usage
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, H.; Liu, H.; Yuan, J.; Le, H.; Shan, W.; Li, L. MAOOA-Residual-Attention-BiConvLSTM: An Automated Deep Learning Framework for Global TEC Map Prediction. Space Weather 2024, 22, e2024SW003954. [Google Scholar] [CrossRef]
- Gao, X.; Yao, Y. A Storm-Time Ionospheric TEC Model with Multichannel Features by the Spatiotemporal ConvLSTM Network. J. Geod. 2023, 97, 9. [Google Scholar] [CrossRef]
- Sivavaraprasad, G.; Deepika, V.S.; SreenivasaRao, D.; Ravi Kumar, M.; Sridhar, M. Performance Evaluation of Neural Network TEC Forecasting Models over Equatorial Low-Latitude Indian GNSS Station. Geod. Geodyn. 2020, 11, 192–201. [Google Scholar] [CrossRef]
- Hu, T.; Lei, Y.; Su, J.; Yang, H.; Ni, W.; Gao, C.; Yu, J.; Wang, Y.; Gu, Y. Learning Spatiotemporal Features of DSA Using 3D CNN and BiConvGRU for Ischemic Moyamoya Disease Detection. Int. J. Neurosci. 2023, 133, 512–522. [Google Scholar] [CrossRef]
- Wang, D.; Yang, Y.; Ning, S. DeepSTCL: A Deep Spatio-Temporal ConvLSTM for Travel Demand Prediction. In Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]
- Wang, X.; Xie, W.; Song, J. Learning Spatiotemporal Features With 3DCNN and ConvGRU for Video Anomaly Detection. In Proceedings of the 2018 14th IEEE International Conference on Signal Processing (ICSP), Beijing, China, 12–16 August 2018; pp. 474–479. [Google Scholar]
- Bilitza, D. International Reference Ionosphere: Recent Developments. Radio Sci. 1986, 21, 343–346. [Google Scholar] [CrossRef]
- Bent, R.B.; Llewellyn, S.K.; Nesterczuk, G.; Schmid, P.E. The Development of a Highly-Successful Worldwide Empirical Ionospheric Model and Its Use in Certain Aspects of Space Communications and Worldwide Total Electron Content Investigations; Naval Research Laboratory: Washington, DC, USA, 1975; Volume 1. [Google Scholar]
- Hochegger, G.; Nava, B.; Radicella, S.; Leitinger, R. A Family of Ionospheric Models for Different Uses. Phys. Chem. Earth Part C Sol. Terr. Planet. Sci. 2000, 25, 307–310. [Google Scholar] [CrossRef]
- Nava, B.; Coïsson, P.; Radicella, S.M. A New Version of the NeQuick Ionosphere Electron Density Model. J. Atmos. Sol.-Terr. Phys. 2008, 70, 1856–1862. [Google Scholar] [CrossRef]
- Ansari, K.; Park, K.-D.; Kubo, N. Linear Time-Series Modeling of the GNSS Based TEC Variations over Southwest Japan during 2011–2018 and Comparison against ARMA and GIM Models. Acta Astronaut. 2019, 165, 248–258. [Google Scholar] [CrossRef]
- Ratnam, D.V.; Otsuka, Y.; Sivavaraprasad, G.; Dabbakuti, J.R.K.K. Development of Multivariate Ionospheric TEC Forecasting Algorithm Using Linear Time Series Model and ARMA over Low-Latitude GNSS Station. Adv. Space Res. 2019, 63, 2848–2856. [Google Scholar] [CrossRef]
- Vankadara, R.K.; Sasmal, S.; Maurya, A.K.; Panda, S.K. An Autoregressive Integrated Moving Average (ARIMA) Based Forecasting of Ionospheric Total Electron Content at a Low Latitude Indian Location. In Proceedings of the 2022 URSI Regional Conference on Radio Science (USRI-RCRS), Indore, India, 1–4 December 2022; pp. 1–4. [Google Scholar]
- Jiang, Z.; Zhang, Z.; He, X.; Li, Y.; Yuan, H. Efficient and Accurate TEC Modeling and Prediction Approach with Random Forest and Bi-LSTM for Large-Scale Region. Adv. Space Res. 2024, 73, 650–662. [Google Scholar] [CrossRef]
- Liu, L.; Zou, S.; Yao, Y.; Wang, Z. Forecasting Global Ionospheric TEC Using Deep Learning Approach. Space Weather 2020, 18, e2020SW002501. [Google Scholar] [CrossRef]
- Wen, Z.; Li, S.; Li, L.; Wu, B.; Fu, J. Ionospheric TEC Prediction Using Long Short-Term Memory Deep Learning Network. Astrophys Space Sci 2021, 366, 3. [Google Scholar] [CrossRef]
- Sun, W.; Xu, L.; Huang, X.; Zhang, W.; Yuan, T.; Chen, Z.; Yan, Y. Forecasting of Ionospheric Vertical Total Electron Content (TEC) Using LSTM Networks. In Proceedings of the 2017 International Conference on Machine Learning and Cybernetics (ICMLC), Ningbo, China, 9–12 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 340–344. [Google Scholar]
- Xie, T.; Dai, Z.; Zhu, X.; Chen, B.; Ran, C. LSTM-Based Short-Term Ionospheric TEC Forecast Model and Positioning Accuracy Analysis. GPS Solut. 2023, 27, 66. [Google Scholar] [CrossRef]
- Tang, J.; Liu, C.; Yang, D.; Ding, M. Prediction of Ionospheric TEC Using a GRU Mechanism Method. Adv. Space Res. 2024, 74, 260–270. [Google Scholar] [CrossRef]
- Xiong, P.; Zhai, D.; Long, C.; Zhou, H.; Zhang, X.; Shen, X. Long Short-Term Memory Neural Network for Ionospheric Total Electron Content Forecasting Over China. Space Weather 2021, 19, e2020SW002706. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, H.; Shan, W.; Yao, Y.; Xing, L.; Wang, H.; Zhang, K. Optimizing Deep Learning Models with Improved BWO for TEC Prediction. Biomimetics 2024, 9, 575. [Google Scholar] [CrossRef]
- Li, D.; Jin, Y.; Wu, F.; Zhao, J.; Min, P.; Luo, X. A Hybrid Model for TEC Prediction Using BiLSTM and PSO-LSSVM. Adv. Space Res. 2024, 74, 303–318. [Google Scholar] [CrossRef]
- Maheswaran, V.K.; Baskaradas, J.A.; Nagarajan, R.; Anbazhagan, R.; Subramanian, S.; Devanaboyina, V.R.; Das, R.M. Bi-LSTM Based Vertical Total Electron Content Prediction at Low-Latitude Equatorial Ionization Anomaly Region of South India. Adv. Space Res. 2024, 73, 3782–3796. [Google Scholar] [CrossRef]
- Mao, S.; Li, H.; Zhang, Y.; Shi, Y. Prediction of Ionospheric Electron Density Distribution Based on CNN-LSTM Model. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Kaselimi, M.; Doulamis, N.; Voulodimos, A.; Doulamis, A.; Delikaraoglou, D. Spatio-Temporal Ionospheric TEC Prediction Using a Deep CNN-GRU Model on GNSS Measurements. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 8317–8320. [Google Scholar]
- Ren, X.; Zhao, B.; Ren, Z.; Wang, Y.; Xiong, B. Deep Learning-Based Prediction of Global Ionospheric TEC During Storm Periods: Mixed CNN-BiLSTM Method. Space Weather 2024, 22, e2024SW003877. [Google Scholar] [CrossRef]
- Lei, D.; Liu, H.; Le, H.; Huang, J.; Yuan, J.; Li, L.; Wang, Y. Ionospheric TEC Prediction Base on Attentional BiGRU. Atmosphere 2022, 13, 1039. [Google Scholar] [CrossRef]
- Han, C.; Guo, Y.; Ou, M.; Wang, D.; Song, C.; Jin, R.; Zhen, W.; Bai, P.; Chong, X.; Wang, X. A Lightweight Prediction Model for Global Ionospheric Total Electron Content Based on Attention-BiLSTM. Adv. Space Res. 2024, 75, 3614–3629. [Google Scholar] [CrossRef]
- Liu, H.; Wang, H.; Yuan, J.; Li, L.; Zhang, L. TEC Prediction Based on Att-CNN-BiLSTM. IEEE Access 2024, 12, 68471–68484. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.-Y.; Wong, W.; WOO, W. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; Curran Associates, Inc.: Red Hook, NY, USA, 2015; Volume 28. [Google Scholar]
- Chen, J.; Zhi, N.; Liao, H.; Lu, M.; Feng, S. Global Forecasting of Ionospheric Vertical Total Electron Contents via ConvLSTM with Spectrum Analysis. GPS Solut. 2022, 26, 69. [Google Scholar] [CrossRef]
- Liu, L.; Morton, Y.J.; Liu, Y. ML Prediction of Global Ionospheric TEC Maps. Space Weather 2022, 20, e2022SW003135. [Google Scholar] [CrossRef]
- Xu, C.; Ding, M.; Tang, J. Prediction of GNSS-Based Regional Ionospheric TEC Using a Multichannel ConvLSTM With Attention Mechanism. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Li, L.; Liu, H.; Le, H.; Yuan, J.; Shan, W.; Han, Y.; Yuan, G.; Cui, C.; Wang, J. Spatiotemporal Prediction of Ionospheric Total Electron Content Based on ED-ConvLSTM. Remote Sens. 2023, 15, 3064. [Google Scholar] [CrossRef]
- de Paulo, M.C.M.; Marques, H.A.; Feitosa, R.Q.; Ferreira, M.P. New Encoder–Decoder Convolutional LSTM Neural Network Architectures for next-Day Global Ionosphere Maps Forecast. GPS Solut. 2023, 27, 95. [Google Scholar] [CrossRef]
- Yang, J.; Huang, W.; Xia, G.; Zhou, C.; Chen, Y. Operational Forecasting of Global Ionospheric TEC Maps 1-, 2-, and 3-Day in Advance by ConvLSTM Model. Remote Sens. 2024, 16, 1700. [Google Scholar] [CrossRef]
- Li, L.; Liu, H.; Le, H.; Yuan, J.; Wang, H.; Chen, Y.; Shan, W.; Ma, L.; Cui, C. ED-AttConvLSTM: An Ionospheric TEC Map Prediction Model Using Adaptive Weighted Spatiotemporal Features. Space Weather 2024, 22, e2023SW003740. [Google Scholar] [CrossRef]
- Tang, J.; Zhong, Z.; Ding, M.; Yang, D.; Liu, H. Forecast of Ionospheric TEC Maps Using ConvGRU Deep Learning Over China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 3334–3344. [Google Scholar] [CrossRef]
- Liu, H.; Wang, H.; Le, H.; Yuan, J.; Shan, W.; Wu, Y.; Chen, Y. CGAOA-STRA-BiConvLSTM: An Automated Deep Learning Framework for Global TEC Map Prediction. GPS Solut. 2025, 29, 55. [Google Scholar] [CrossRef]
- Tang, J.; Zhong, Z.; Hu, J.; Wu, X. Forecasting Regional Ionospheric TEC Maps over China Using BiConvGRU Deep Learning. Remote Sens. 2023, 15, 3405. [Google Scholar] [CrossRef]
- Luo, W.; Li, Y.; Urtasun, R.; Zemel, R. Understanding the Effective Receptive Field in Deep Convolutional Neural Networks. Adv. Neural Inf. Process. Syst. 2016, 29. Available online: https://proceedings.neurips.cc/paper/2016/hash/c8067ad1937f728f51288b3eb986afaa-Abstract.html (accessed on 11 June 2025).
- Wang, Y.; Long, M.; Wang, J.; Gao, Z.; Yu, P.S. PredRNN: Recurrent Neural Networks for Predictive Learning Using Spatiotemporal LSTMs. Adv. Neural Inf. Process. Syst. 2017, 30. Available online: https://proceedings.neurips.cc/paper/2017/hash/e5f6ad6ce374177eef023bf5d0c018b6-Abstract.html?ref=https://githubhelp.com (accessed on 11 June 2025).
- Lin, Z.; Li, M.; Zheng, Z.; Cheng, Y.; Yuan, C. Self-Attention ConvLSTM for Spatiotemporal Prediction. Proc. AAAI Conf. Artif. Intell. 2020, 34, 11531–11538. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Chen, L.-C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-Decoder with Atrous Separable Convolution for Semantic Image Segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar]
- Cho, K.; Merrienboer, B.v.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations Using RNN Encoder-Decoder for Statistical Machine Translation. In Proceedings of the 2014 Conference on Empirical Methods in Natural Language Processing (EMNLP), Doha, Qatar, 25–29 October 2014. [Google Scholar]
- Elman, J.L. Finding Structure in Time. Cogn. Sci. 1990, 14, 179–211. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Hyperparameter Setting | |
|---|---|---|
| Filter | Kernel Size | |
| ConvLSTM | 64 | 5 |
| PredRNN | 13 | 5 |
| ED-SA-ConvLSTM | 16 | 3 |
| Solar Activity | Model | ||
|---|---|---|---|
| High solar activity (2015) | SA-ConvLSTM | 3.6977 | 13.12% |
| ED-SA-ConvLSTM | 3.6150 | 12.82% | |
| Low solar activity (2019) | SA-ConvLSTM | 1.4003 | 14.36% |
| ED-SA-ConvLSTM | 1.3645 | 12.93% |
| Solar Activity | Model | ||
|---|---|---|---|
| High solar activity (2015) | C1PG | 4.0295 | 16.12% |
| ConvLSTM | 3.8936 | 14.47% | |
| PredRNN | 3.7928 | 13.95% | |
| ED-SA-ConvLSTM | 3.6150 | 12.82% | |
| Low solar activity (2019) | C1PG | 1.5421 | 14.95% |
| ConvLSTM | 1.4222 | 14.01% | |
| PredRNN | 1.4031 | 13.89% | |
| ED-SA-ConvLSTM | 1.3645 | 12.93% |
| Model | |||||
|---|---|---|---|---|---|
| C1PG | 15.58% | 28.85% | 40.75% | 51.00% | 59.65% |
| ConvLSTM | 16.51% | 31.66% | 44.67% | 55.38% | 63.88% |
| PredRNN | 17.00% | 32.65% | 45.97% | 56.72% | 65.12% |
| ED-SA-ConvLSTM | 18.07% | 34.36% | 48.00% | 58.80% | 67.15% |
| Model | |||||
|---|---|---|---|---|---|
| C1PG | 14.08% | 26.50% | 40.17% | 50.20% | 61.98% |
| ConvLSTM | 16.37% | 31.79% | 45.57% | 57.25% | 66.69% |
| PredRNN | 16.62% | 32.38% | 46.42% | 58.22% | 67.72% |
| ED-SA-ConvLSTM | 17.27% | 33.48% | 47.70% | 59.50% | 68.81% |
| Geomagnetic Storm Event | DOY | |
|---|---|---|
| Case1 | DOY 74–78, 2015 | −234 |
| Case2 | DOY 172–176, 2015 | −198 |
| Case3 | DOY 278–282, 2015 | −130 |
| Case4 | DOY 352–356, 2015 | −166 |
| Solar Activity | Model | Region | |||||
|---|---|---|---|---|---|---|---|
| Low | Mid | High | Low | Mid | High | ||
| 2011 (high solar activity) | C1PG | 3.7699 | 2.7808 | 2.3763 | 11.22% | 13.65% | 18.92% |
| ConvLSTM | 3.6902 | 2.1620 | 1.9535 | 10.25% | 9.90% | 15.91% | |
| PredRNN | 3.6652 | 2.0896 | 1.8880 | 10.00% | 9.61% | 15.23% | |
| ED-SA-ConvLSTM | 3.5970 | 1.9606 | 1.6937 | 9.92% | 9.17% | 13.65% | |
| 2016 (low solar activity) | C1PG | 3.6106 | 2.3521 | 1.7489 | 13.77% | 16.22% | 22.15% |
| ConvLSTM | 3.6049 | 1.9193 | 1.4531 | 13.62% | 13.02% | 20.15% | |
| PredRNN | 3.5372 | 1.8777 | 1.3967 | 13.15% | 12.96% | 19.53% | |
| ED-SA-ConvLSTM | 3.5631 | 1.8546 | 1.3796 | 13.20% | 12.39% | 17.87% | |
| Model | Computational Time (min) | Memory Usage (MB) |
|---|---|---|
| ConvLSTM | 470 | 3938.44 |
| PredRNN | 675 | 3954.85 |
| ED-SA-ConvLSTM | 1235 | 3980.18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Deng, H.; Xiao, J.; Li, B.; Han, T.; Huang, J.; Liu, H. ED-SA-ConvLSTM: A Novel Spatiotemporal Prediction Model and Its Application in Ionospheric TEC Prediction. Mathematics 2025, 13, 1986. https://doi.org/10.3390/math13121986
Li Y, Deng H, Xiao J, Li B, Han T, Huang J, Liu H. ED-SA-ConvLSTM: A Novel Spatiotemporal Prediction Model and Its Application in Ionospheric TEC Prediction. Mathematics. 2025; 13(12):1986. https://doi.org/10.3390/math13121986
Chicago/Turabian StyleLi, Yalan, Haiming Deng, Jian Xiao, Bin Li, Tao Han, Jianquan Huang, and Haijun Liu. 2025. "ED-SA-ConvLSTM: A Novel Spatiotemporal Prediction Model and Its Application in Ionospheric TEC Prediction" Mathematics 13, no. 12: 1986. https://doi.org/10.3390/math13121986
APA StyleLi, Y., Deng, H., Xiao, J., Li, B., Han, T., Huang, J., & Liu, H. (2025). ED-SA-ConvLSTM: A Novel Spatiotemporal Prediction Model and Its Application in Ionospheric TEC Prediction. Mathematics, 13(12), 1986. https://doi.org/10.3390/math13121986