
A Novel Genetic Algorithm for Constrained Multimodal Multi-Objective Optimization Problems

Abstract
1. Introduction
- (1)
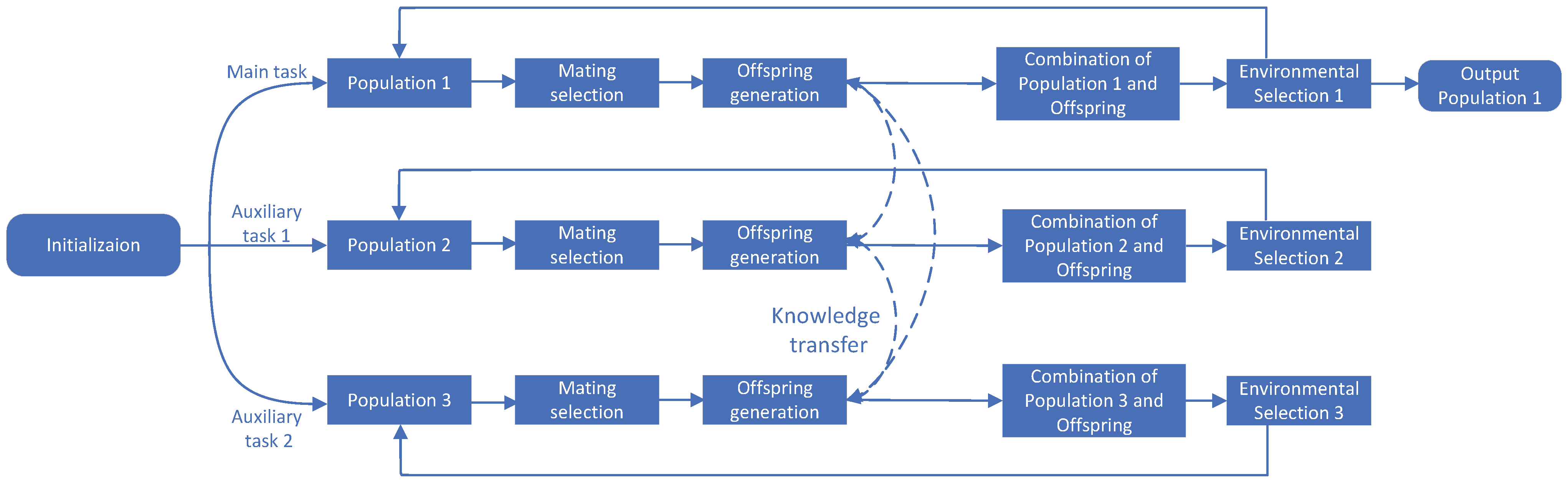
- A multitasking-based genetic algorithm (MTGA-CMMO) is devised to solve CMMOPs. MTGA-CMMO consists of one main task and two auxiliary tasks. By transferring useful knowledge among the different tasks, the main task can obtain all the CPSs of CMMOPs.
- (2)
- A novel mating selection mechanism based on the decision space probabilistic information is proposed, which ensures the individuals with better decision space diversity have a higher probability as parents for reproduction, thus improving the exploration capability of MTGA-CMMO.
- (3)
- Three distinct environmental selection strategies are developed, each tailored to fulfill the specific functionalities required by different tasks of MTGA-CMMO.
2. Related Works
2.1. CMOEAs
2.2. MMEAs
2.3. EMT
3. MTGA-CMMO
3.1. Procedure of MTGA-CMMO
- •
- The probability value of each individual of three populations is calculated as in Equations (7) and (8) in Section 3.2, which reflects the decision space diversity of the individuals (line 5).
- •
- For each optimization task, based on the value, the well-distributed individuals in the decision space are likely to be selected as parents from the population using the roulette-wheel selection mechanism (lines 6–8). It is worth noting that the number of parents selected from auxiliary task 2 is the minimum value between the size of and , while the number of parents selected from the other two tasks is both set to . This difference is caused by the environmental selection mechanism of auxiliary task 2, which retains only the feasible individuals in and (Explained further in Section 3.3).
- •
- , , and , corresponding to the three optimization tasks, are reproduced via GA operators based on the selected parents and evaluated. Then, a temp-pop is generated by combining , , and (lines 9–13).
- •
- , , and are combined with their respective and the ideal individuals are selected for the next generation population using different environmental selection strategies based on the various roles of the tasks in MTGA-CMMO (lines 14–16).
| Algorithm 1 MTGA-CMMO |
|
3.2. Probability-Based Leader Mating Selection Mechanism
3.3. Environmental Selection Strategies in Various Optimization Tasks
3.3.1. Environmental Selection Strategy in the Main Task
| Algorithm 2 SR Algorithm |
|
| Algorithm 3 Environmental selection strategy of the main task |
|
3.3.2. Environmental Selection Strategy in Auxiliary Task 1
| Algorithm 4 Environmental selection strategy of auxiliary task 1 |
|
- •
- Case 1, where there are no feasible individuals in the temp-pop (lines 4–11). The CDP method is first used to sort the temp-pop in terms of non-domination, then the individuals with the same domination level are ranked by the SR method based on the diversity metrics. When the number of non-dominated individuals () is less than , the top-ranked individuals from temp-pop are taken as the updated , otherwise, a truncation method similar to that of SPEA2 [52] is used to trim the number of non-dominated individuals to based on the decision space diversity indicator.
- •
- Case 2, where the number of feasible individuals in the temp-pop falls below (lines 12–20). Firstly, the feasible subpopulation is stored as part of the updated , and s denotes the deviation between and the number of feasible solutions. Then, for infeasible individuals, the method in Case 1 is used to retain s well-convergent and well-distributed individuals as the remaining individuals in .
- •
- Case 3, where the number of feasible individuals in the temp-pop exceeds (lines 21–28). First, we perform a non-dominated ranking for the feasible subpopulation using a multi-objective approach [27], which treats the CV value as an auxiliary objective function, thus the individuals who perform well on feasibility and objective functions have more possibilities to be ranked at the top of the subpopulation . Next, the individuals whose dominance relationships are at the same level are sorted based on diversity indicators using the SR method. When the number of non-dominant individuals falls below , the top-ranked individuals in are retained as , otherwise, a truncation method similar to that of SPEA2 is used to trim the number of non-dominated individuals to based on the decision space diversity indicator.
3.3.3. Environmental Selection Strategy in Auxiliary Task 2
| Algorithm 5 Environmental selection strategy of auxiliary task 2 |
|
3.4. Computational Complexity of MTGA-CMMO
4. Experimental Settings
4.1. Benchmark Test Problems
4.2. Performance Indicators
4.3. Comparison Algorithms
5. Experiment Results and Analysis
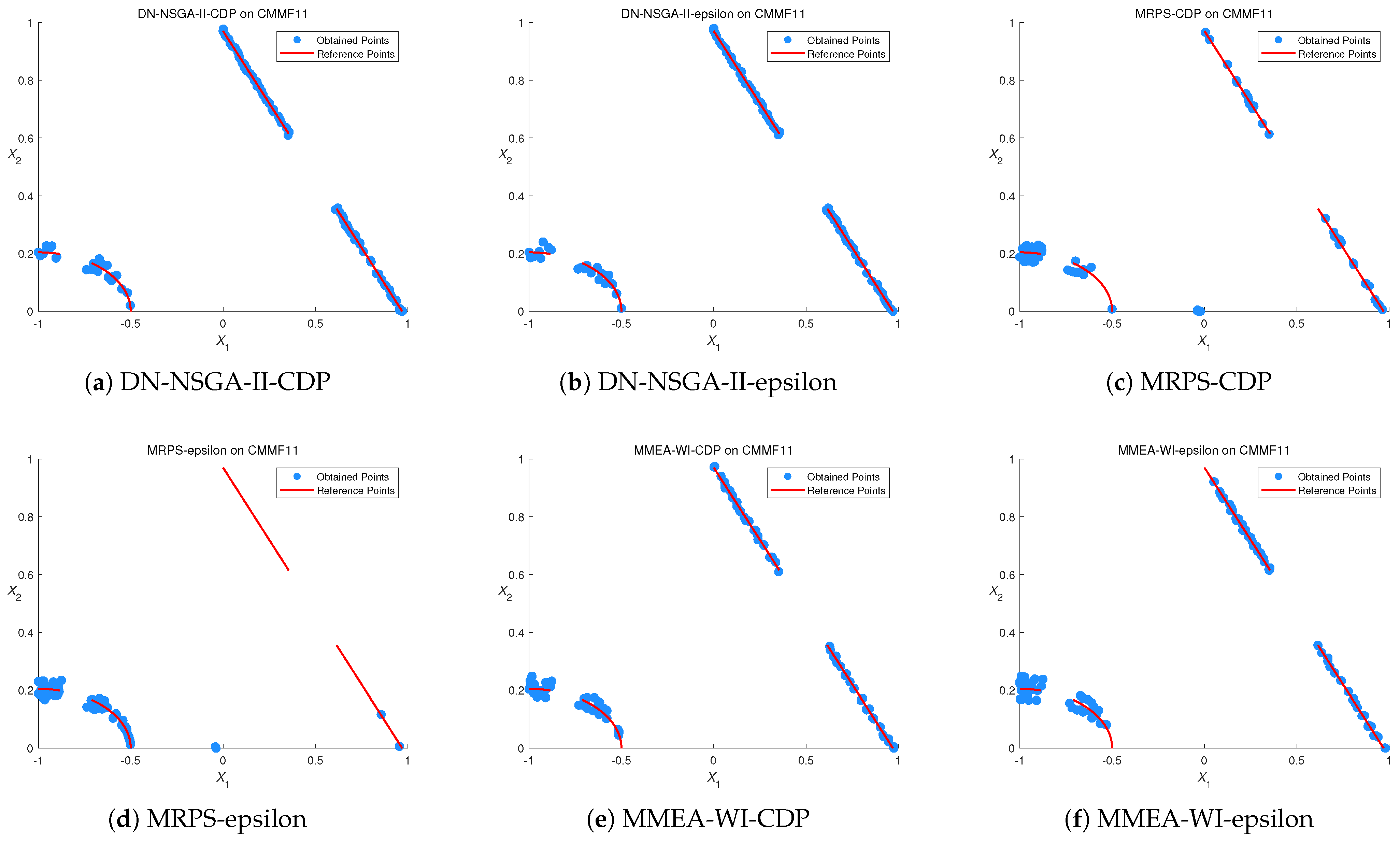
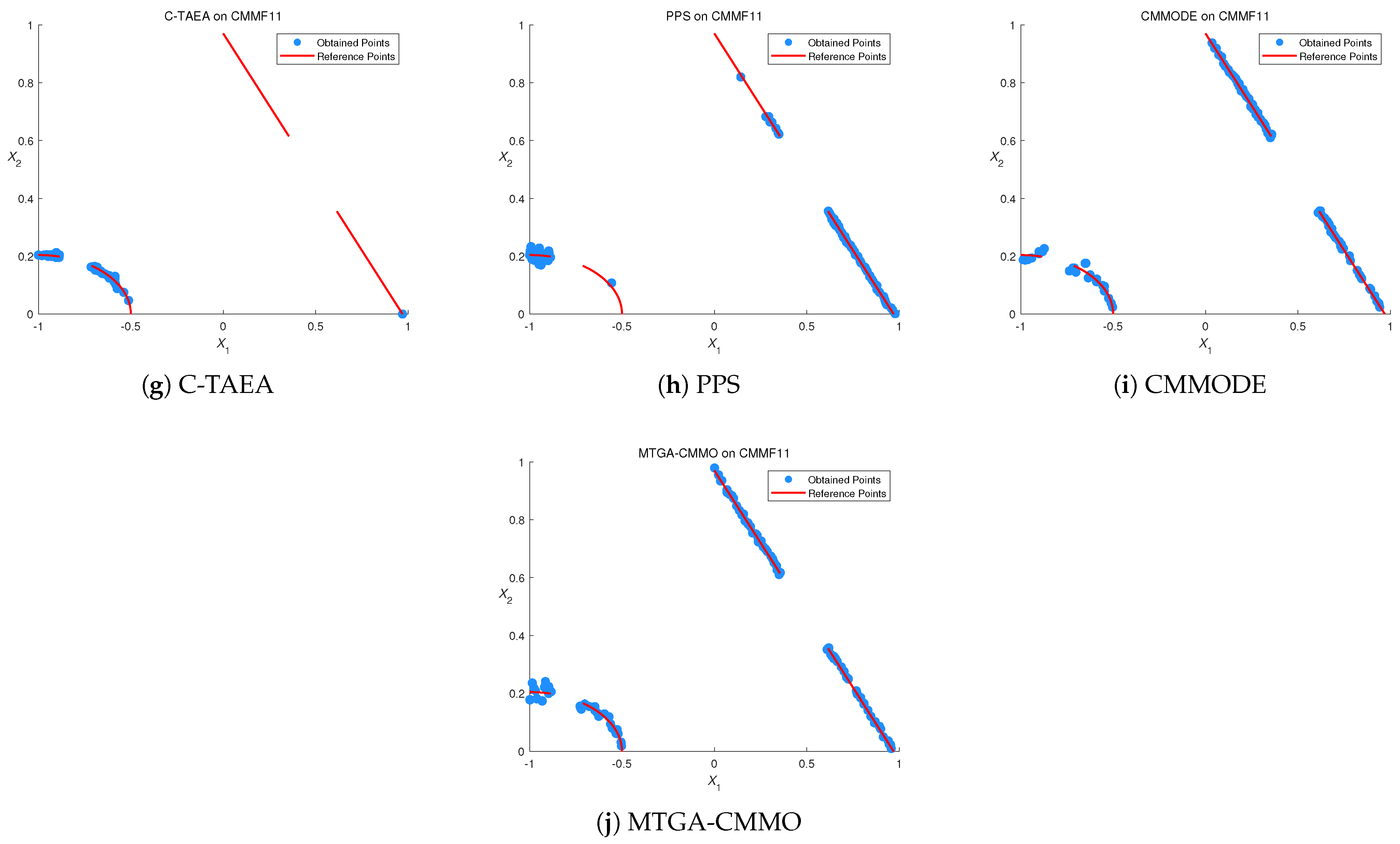
5.1. Comparison Experiment
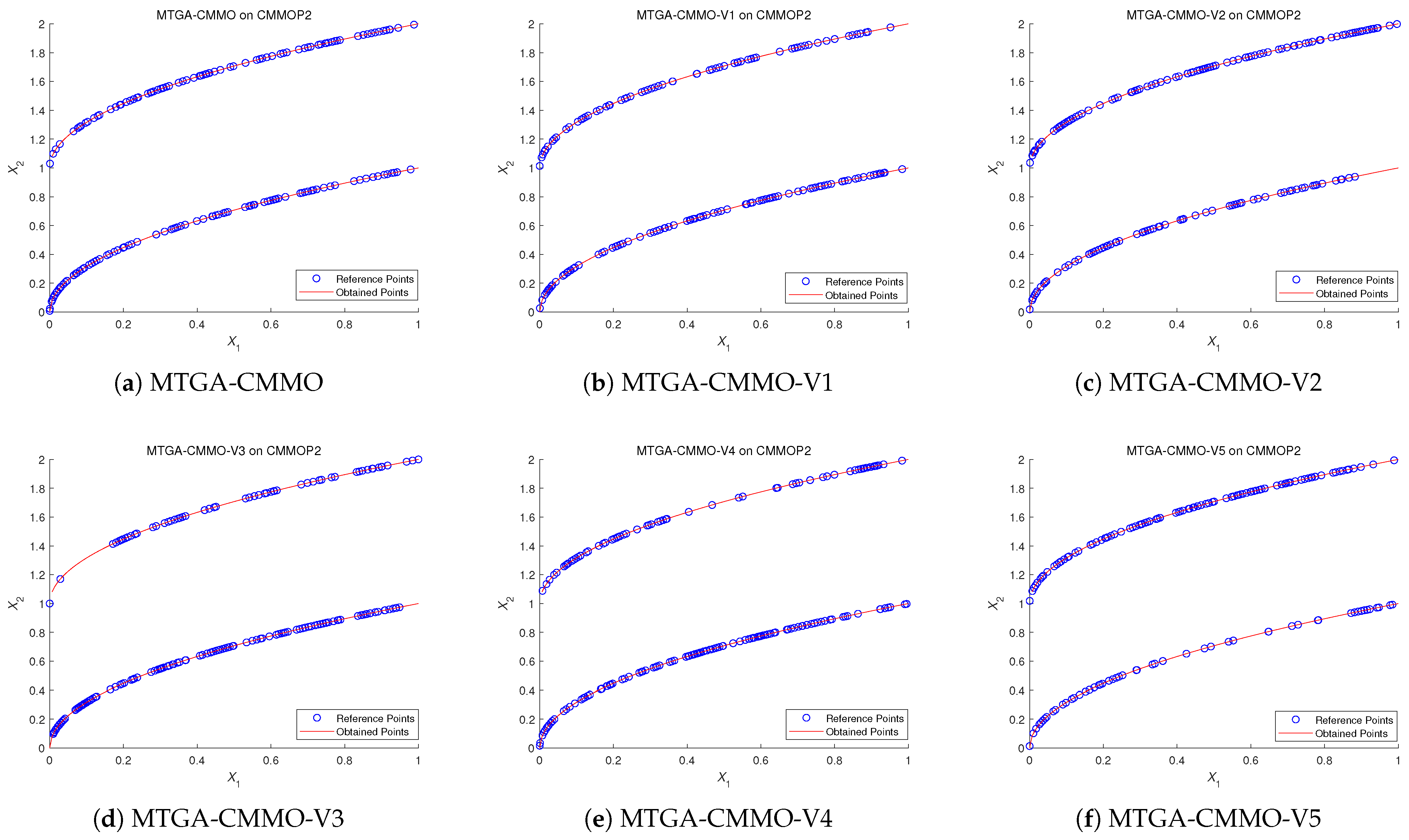
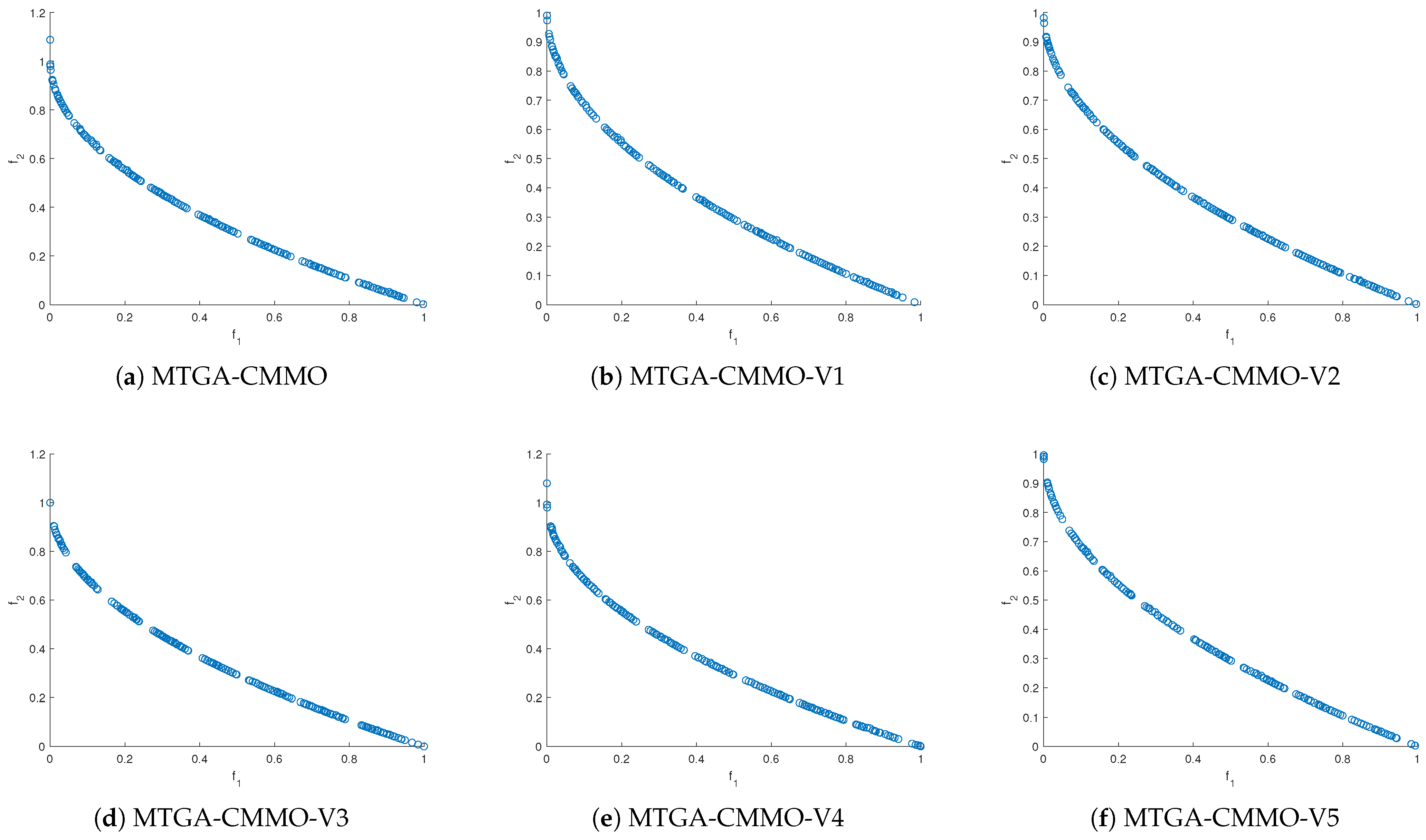
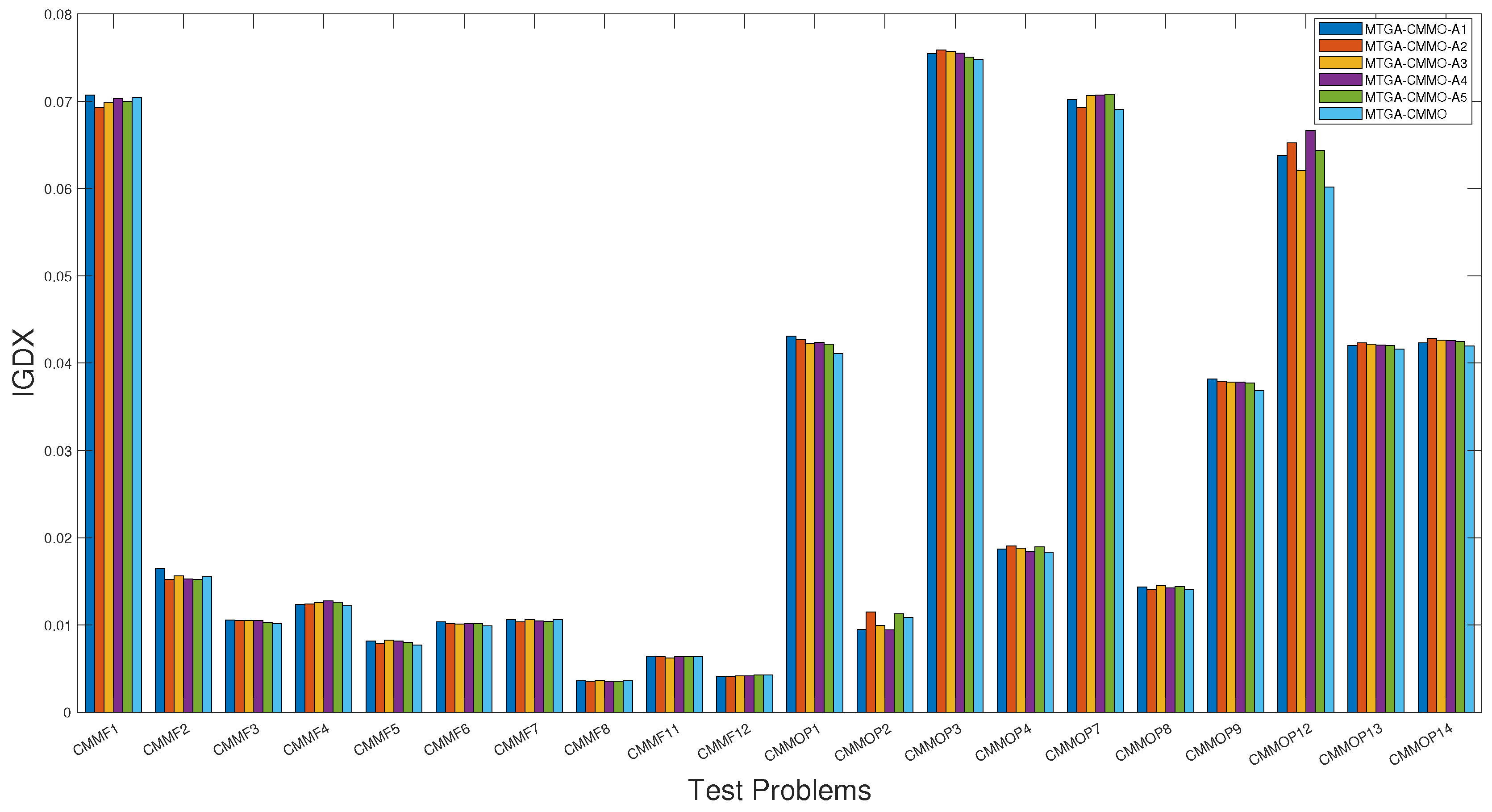
5.2. Ablation Experiment
- (1)
- A novel multitasking optimization structure, including three optimization tasks.
- (2)
- Mating selection strategy based on the probabilistic information of the decision space.
- (3)
- Environmental selection strategies in different optimization tasks.
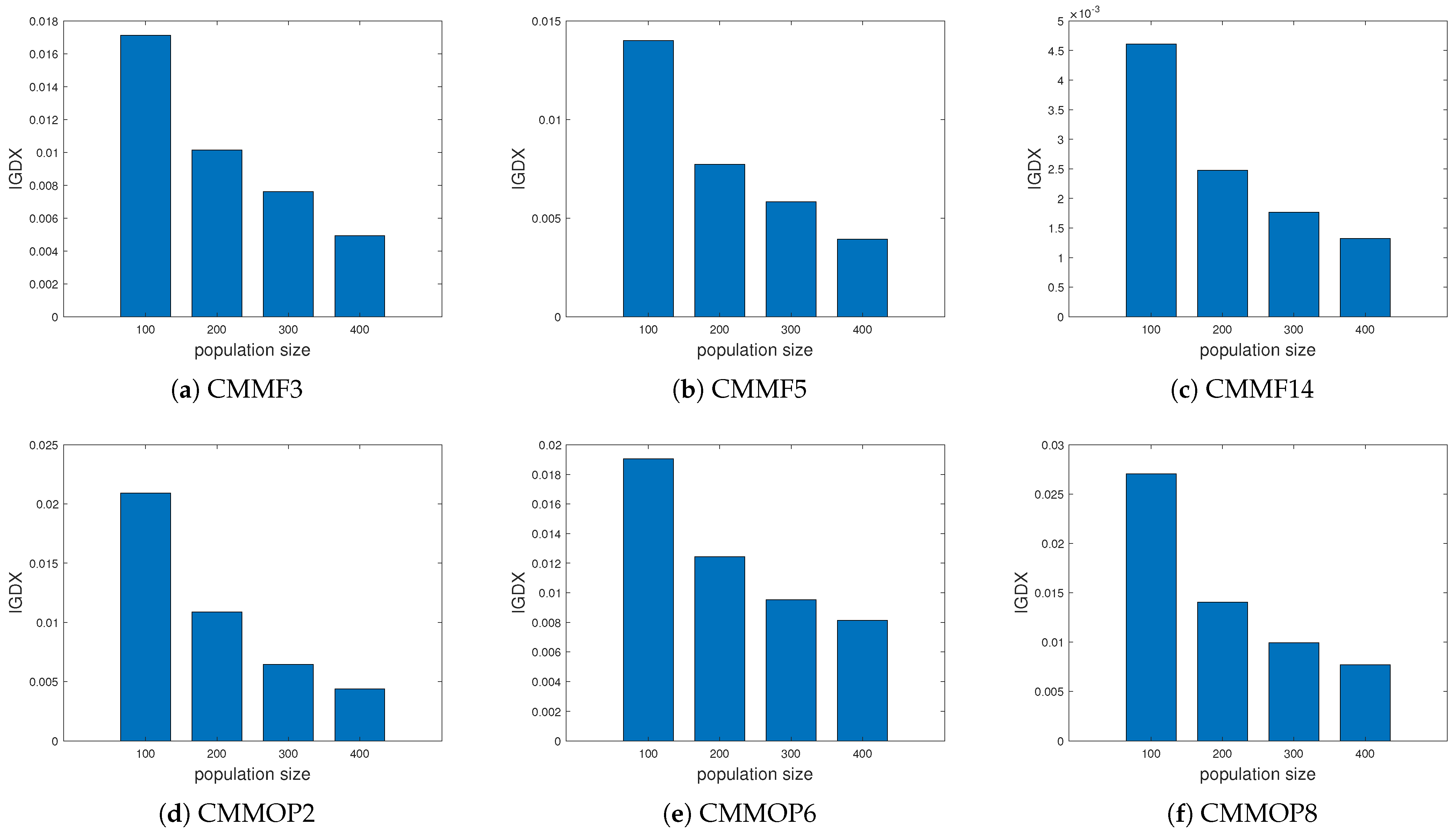
5.3. Parameter Analysis
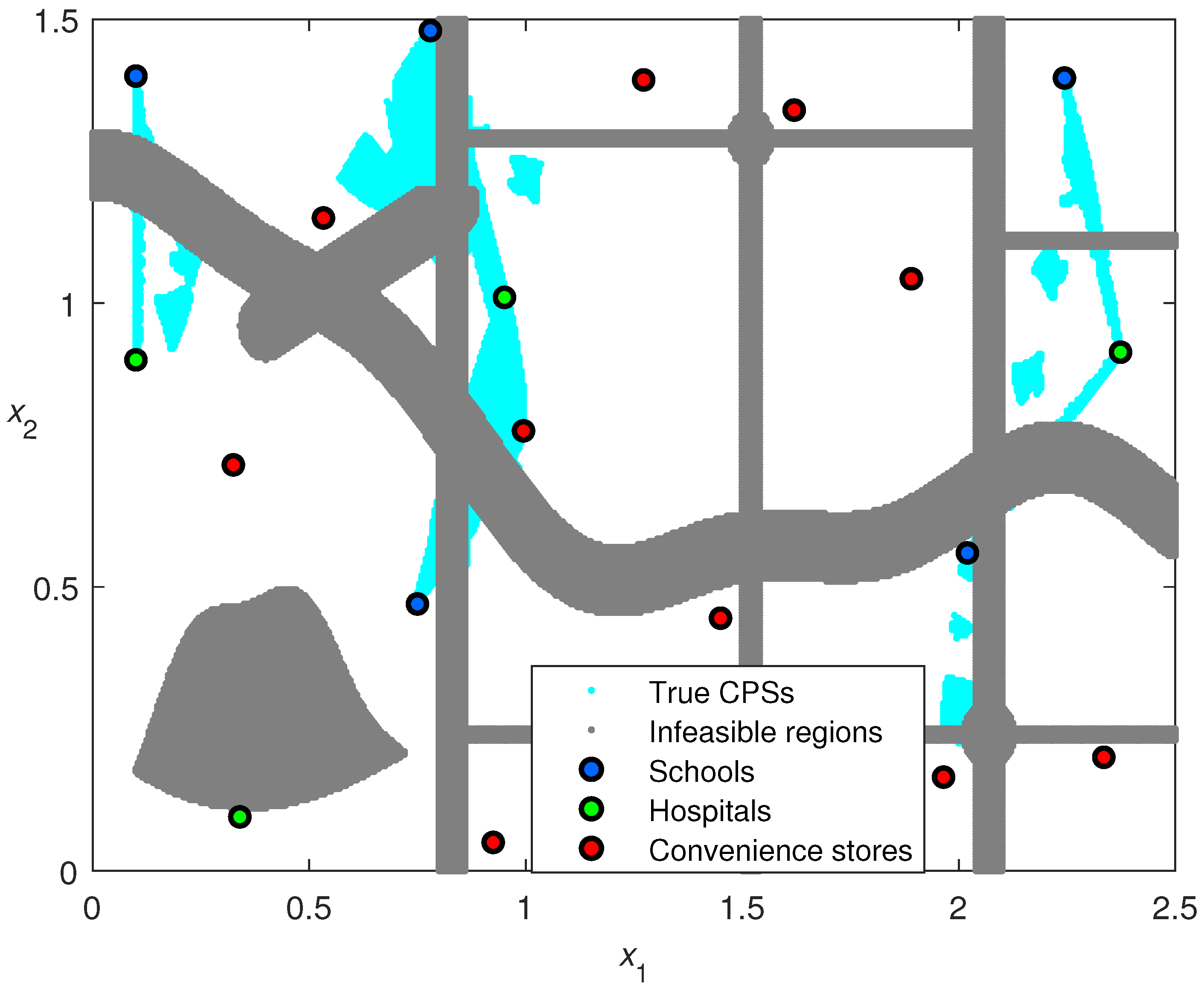
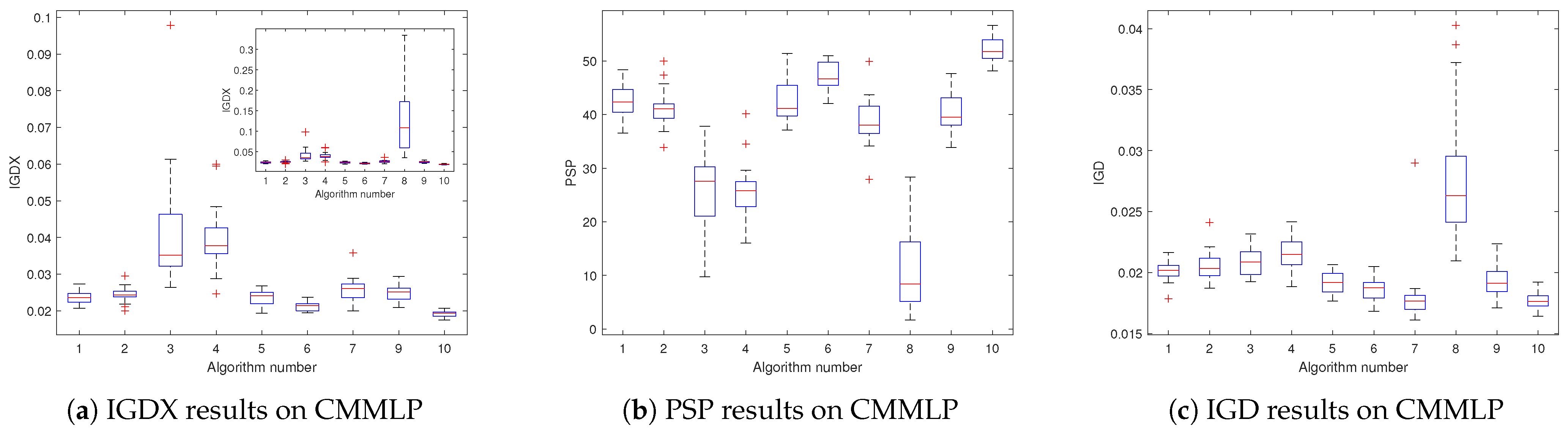
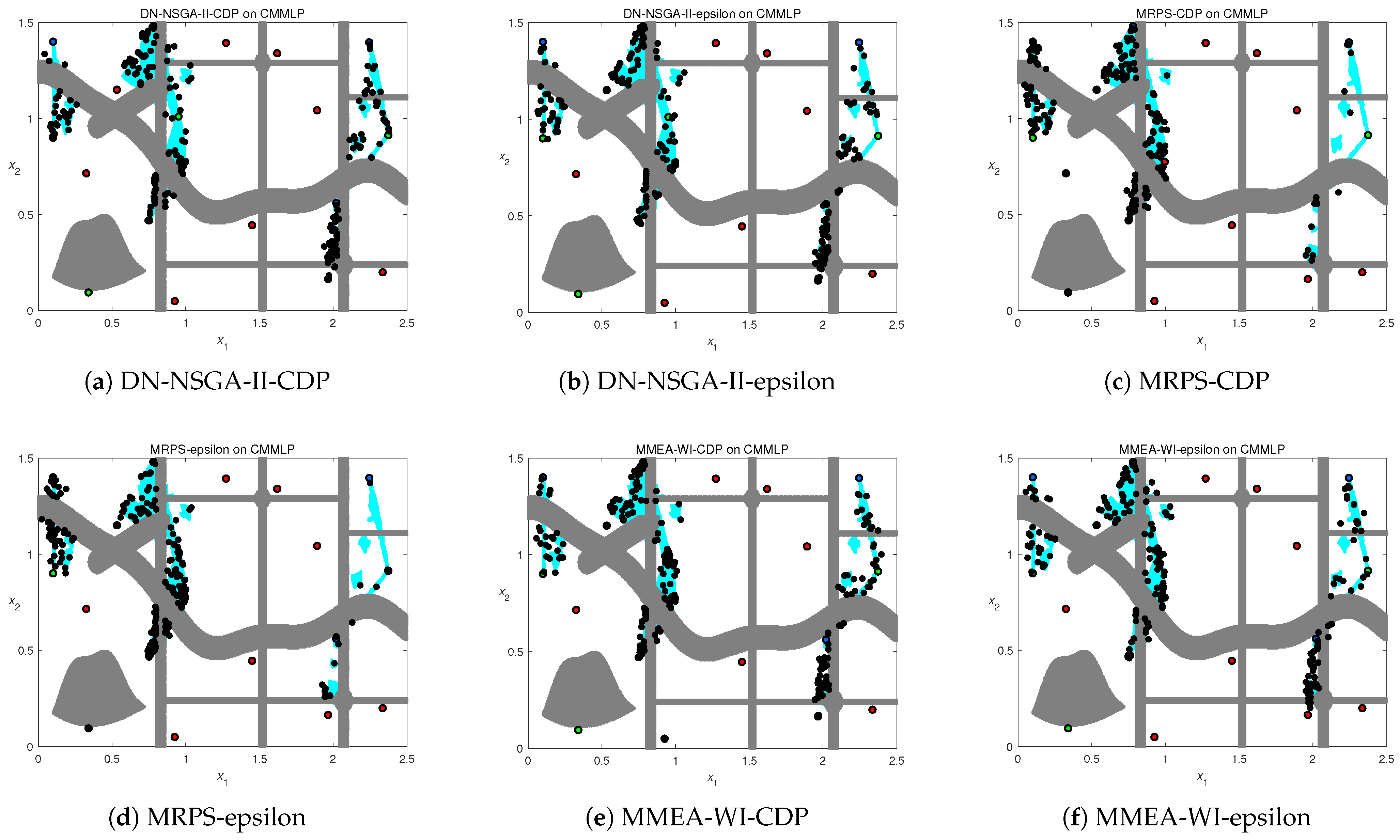
5.4. Application
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zou, D.; Gong, D.; Ouyang, H. The dynamic economic emission dispatch of the combined heat and power system integrated with a wind farm and a photovoltaic plant. Appl. Energy 2023, 351, 121890. [Google Scholar] [CrossRef]
- Zou, D.; Li, M.; Ouyang, H. A MOEA/D approach using two crossover strategies for the optimal dispatches of the combined cooling, heating, and power systems. Appl. Energy 2023, 347, 121498. [Google Scholar] [CrossRef]
- Li, G.; Zhang, W.; Yue, C.; Yen, G. Clustering-based evolutionary algorithm for constrained multimodal multi-objective optimization. Swarm Evol. Comput. 2024, 91, 101714. [Google Scholar] [CrossRef]
- Li, Y.; Guo, S.; Liang, J.; Qu, B.; Li, C.; Yu, K. A subspace strategy based coevolutionary framework for constrained multimodal multiobjective optimization problems. Swarm Evol. Comput. 2025, 95, 101941. [Google Scholar]
- Wu, F.; Sun, Y. A dual-population co-evolution algorithm with balanced environmental selection for constrained multimodal multiobjective optimization problems. Swarm Evol. Comput. 2025, 94, 101862. [Google Scholar] [CrossRef]
- Li, G.; Zhang, W.; Yue, C.; Wang, Y.; Tang, J. A dynamic-speciation-based differential evolution with ring topology for constrained multimodal multi-objective optimization. Inf. Sci. 2024, 677, 120879. [Google Scholar] [CrossRef]
- Li, G.; Zhang, W.; Yue, C.; Wang, Y.; Xin, Y.; Gao, K. A dynamic-ranking-assisted co-evolutionary algorithm for constrained multimodal multi-objective optimization. Swarm Evol. Comput. 2024, 91, 101744. [Google Scholar] [CrossRef]
- Liang, J.; Lin, H.; Yue, C.; Yu, K.; Guo, Y.; Qiao, K. Multiobjective differential evolution with speciation for constrained multimodal multiobjective optimization. IEEE Trans. Evol. Comput. 2022, 27, 1115–1129. [Google Scholar] [CrossRef]
- Ming, F.; Gong, W.; Yang, Y.; Liao, Z. Constrained multimodal multi-objective optimization: Test problem construction and algorithm design. Swarm Evol. Comput. 2023, 76, 101209. [Google Scholar] [CrossRef]
- Gupta, A.; Ong, Y.-S.; Feng, L. Multifactorial evolution: Toward evolutionary multitasking. IEEE Trans. Evol. Comput. 2015, 20, 343–357. [Google Scholar] [CrossRef]
- Qiao, K.; Yu, K.; Qu, B.; Liang, J.; Song, H.; Yue, C. An evolutionary multitasking optimization framework for constrained multiobjective optimization problems. IEEE Trans. Evol. Comput. 2022, 26, 263–277. [Google Scholar] [CrossRef]
- Qiao, K.; Yu, K.; Qu, B.; Liang, J.; Song, H.; Yue, C. Dynamic auxiliary task-based evolutionary multitasking for constrained multi-objective optimization. IEEE Trans. Evol. Comput. 2022, 27, 642–656. [Google Scholar] [CrossRef]
- Qiao, K.; Liang, J.; Liu, Z.; Yu, K.; Yue, C.; Qu, B. Evolutionary multitasking with global and local auxiliary tasks for constrained multi-objective optimization. IEEE/CAA J. Autom. Sin. 2023, 10, 1951–1964. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Takahama, T.; Sakai, S. Constrained optimization by the constrained differential evolution with gradient-based mutation and feasible elites. In Proceedings of the 2006 IEEE Congress on Evolutionary Computation, Vancouver, BC, Canada, 16–21 July 2006; IEEE: New York, NY, USA, 2006; pp. 1–8. [Google Scholar]
- Fan, Z.; Li, W.; Cai, X.; Li, H.; Wei, C.; Zhang, Q.; Deb, K. Push and pull search for solving constrained multi-objective optimization problems. Swarm Evol. Comput. 2019, 44, 665–679. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, T.; Xiao, J.; Zhang, X.; Jin, Y. A coevolutionary framework for constrained multiobjective optimization problems. IEEE Trans. Evol. Comput. 2020, 25, 102–116. [Google Scholar] [CrossRef]
- Maldonado, H.M.; Zapotecas-Martínez, S. A dynamic penalty function within MOEA/D for constrained multi-objective optimization problems. In Proceedings of the 2021 IEEE Congress on Evolutionary Computation, Kraków, Poland, 28 June–1 July 2021; IEEE: New York, NY, USA, 2021; pp. 1470–1477. [Google Scholar]
- Vaz, F.; Lavinas, Y.; Aranha, C.; Ladeira, M. Exploring constraint handling techniques in real-world problems on MOEA/D with limited budget of evaluations. In Proceedings of the 11th International Conference Evolutionary Multi-Criterion Optimization, Shenzhen, China, 28–31 March 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 555–566. [Google Scholar]
- Runarsson, T.P.; Yao, X. Stochastic ranking for constrained evolutionary optimization. IEEE Trans. Evol. Comput. 2000, 4, 284–294. [Google Scholar] [CrossRef]
- Saha, A.; Ray, T. Equality constrained multi-objective optimization. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation, Brisbane, QLD, Australia, 10–15 June 2012; IEEE: New York, NY, USA, 2012; pp. 1–7. [Google Scholar]
- Fan, Z.; Fang, Y.; Li, W.; Cai, X.; Wei, C.; Goodman, E. MOEA/D with angle-based constrained dominance principle for constrained multi-objective optimization problems. Appl. Soft Comput. 2019, 74, 621–633. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, J.; Tan, S.; Wang, H. A multi-objective differential evolutionary algorithm for constrained multi-objective optimization problems with low feasible ratio. Appl. Soft Comput. 2019, 80, 42–56. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, J.; Tan, S. A constrained multi-objective evolutionary algorithm based on decomposition and dynamic constraint-handling mechanism. Appl. Soft Comput. 2020, 89, 106104. [Google Scholar] [CrossRef]
- Gu, Q.; Wang, Q.; Xiong, N.; Jiang, S.; Chen, L. Surrogate-assisted evolutionary algorithm for expensive constrained multi-objective discrete optimization problems. Complex Intell. Syst. 2021, 8, 2699–2718. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhu, M.; Wang, J.; Zhang, Z.; Xiang, Y.; Zhang, J. Tri-goal evolution framework for constrained many-objective optimization. IEEE Trans. Syst. Man, Cybern. Syst. 2018, 50, 3086–3099. [Google Scholar] [CrossRef]
- Ma, H.; Wei, H.; Tian, Y.; Cheng, R.; Zhang, X. A multi-stage evolutionary algorithm for multi-objective optimization with complex constraints. Inf. Sci. 2021, 560, 68–91. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, Y.; Su, Y.; Zhang, X.; Tan, K.; Jin, Y. Balancing objective optimization and constraint satisfaction in constrained evolutionary multiobjective optimization. IEEE Trans. Cybern. 2021, 52, 9559–9572. [Google Scholar] [CrossRef]
- Wang, J.; Li, Y.; Zhang, Q.; Zhang, Z.; Gao, S. Cooperative multiobjective evolutionary algorithm with propulsive population for constrained multiobjective optimization. IEEE Trans. Syst. Man, Cybern. Syst. 2021, 52, 3476–3491. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, B.; Tang, K. Handling constrained multiobjective optimization problems via bidirectional coevolution. IEEE Trans. Cybern. 2021, 52, 10163–10176. [Google Scholar] [CrossRef]
- Deb, K.; Tiwari, S. Omni-optimizer: A generic evolutionary algorithm for single and multi-objective optimization. Eur. J. Oper. Res. 2008, 185, 1062–1087. [Google Scholar] [CrossRef]
- Yue, C.; Qu, B.; Liang, J. A multiobjective particle swarm optimizer using ring topology for solving multimodal multiobjective problems. IEEE Trans. Evol. Comput. 2017, 22, 805–817. [Google Scholar] [CrossRef]
- Yue, C.; Suganthan, P.; Liang, J.; Qu, B.; Yu, K.; Zhu, Y.; Yan, L. Differential evolution using improved crowding distance for multimodal multiobjective optimization. Swarm Evol. Comput. 2021, 62, 100849. [Google Scholar] [CrossRef]
- Liang, J.; Yue, C.; Qu, B. Multimodal multi-objective optimization: A preliminary study. In Proceedings of the 2016 IEEE Congress on Evolutionary Computation, Vancouver, BC, Canada, 24–29 July 2016; IEEE: New York, NY, USA, 2016; pp. 2454–2461. [Google Scholar]
- Li, W.; Zhang, T.; Wang, R.; Ishibuchi, H. Weighted indicator-based evolutionary algorithm for multimodal multiobjective optimization. IEEE Trans. Evol. Comput. 2021, 25, 1064–1078. [Google Scholar] [CrossRef]
- Li, W.; Yao, X.; Li, K.; Wang, R.; Zhang, T.; Wang, L. Coevolutionary Framework for Generalized Multimodal Multi-Objective Optimization. IEEE/CAA J. Autom. Sin. 2023, 10, 1544–1556. [Google Scholar] [CrossRef]
- Liu, Y.; Yen, G.; Gong, D. A multimodal multiobjective evolutionary algorithm using two-archive and recombination strategies. IEEE Trans. Evol. Comput. 2018, 23, 660–674. [Google Scholar] [CrossRef]
- Liu, Y.; Ishibuchi, H.; Yen, G.; Nojima, Y.; Masuyama, N. Handling imbalance between convergence and diversity in the decision space in evolutionary multimodal multiobjective optimization. IEEE Trans. Evol. Comput. 2019, 24, 551–565. [Google Scholar]
- Zhang, K.; Shen, C.; Yen, G.; Xu, Z.; He, J. Two-stage double niched evolution strategy for multimodal multiobjective optimization. IEEE Trans. Evol. Comput. 2021, 25, 754–768. [Google Scholar] [CrossRef]
- Li, G.; Sun, M.; Wang, Y.; Wang, W.; Zhang, W.; Yue, C.; Zhang, G. A ring-hierarchy-based evolutionary algorithm for multimodal multi-objective optimization. Swarm Evol. Comput. 2023, 81, 101352. [Google Scholar] [CrossRef]
- Tanabe, R.; Ishibuchi, H. A review of evolutionary multimodal multiobjective optimization. IEEE Trans. Evol. Comput. 2019, 24, 193–200. [Google Scholar] [CrossRef]
- Li, G.; Lin, Q.; Gao, W. Multifactorial optimization via explicit multipopulation evolutionary framework. Inf. Sci. 2020, 512, 1555–1570. [Google Scholar] [CrossRef]
- Zhang, F.; Mei, Y.; Nguyen, S.; Zhang, M.; Tan, K. Surrogate-assisted evolutionary multitask genetic programming for dynamic flexible job shop scheduling. IEEE Trans. Evol. Comput. 2021, 25, 651–665. [Google Scholar] [CrossRef]
- Sagarna, R.; Ong, Y.-S. Concurrently searching branches in software tests generation through multitask evolution. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence, Athens, Greece, 6–9 December 2016; IEEE: New York, NY, USA, 2016; pp. 1–8. [Google Scholar]
- Liang, J.; Qiao, K.; Yuan, M.; Yu, K.; Qu, B.; Ge, S.; Li, Y. Evolutionary multi-task optimization for parameters extraction of photovoltaic models. Energy Convers. Manag. 2020, 207, 112509. [Google Scholar] [CrossRef]
- Chen, K.; Xue, B.; Zhang, M.; Zhou, F. An evolutionary multitasking-based feature selection method for high-dimensional classification. IEEE Trans. Cybern. 2020, 52, 7172–7186. [Google Scholar] [CrossRef]
- Gupta, A.; Mańdziuk, J.; Ong, Y.-S. Evolutionary multitasking in bi-level optimization. Complex Intell. Syst. 2015, 1, 83–95. [Google Scholar] [CrossRef]
- Gupta, A.; Zhou, L.; Ong, Y.-S.; Chen, Z.; Hou, Y. Half a dozen real-world applications of evolutionary multitasking, and more. IEEE Comput. Intell. Mag. 2022, 17, 49–66. [Google Scholar] [CrossRef]
- Wahyuni, I.; Mahmudy, W.; Iriany, A. Rainfall prediction using hybrid adaptive neuro fuzzy inference system (ANFIS) and genetic algorithm. J. Telecommun. Electron. Comput. Eng. 2017, 9, 51–56. [Google Scholar]
- Mattioli, F.; Caetano, D.; Cardoso, A.; Naves, E.; Lamounier, E. An experiment on the use of genetic algorithms for topology selection in deep learning. J. Electr. Comput. Eng. 2019, 1, 1–12. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Wang, B. Indicator-based constrained multiobjective evolutionary algorithms. IEEE Trans. Syst. Man, Cybern. Syst. 2019, 51, 5414–5426. [Google Scholar] [CrossRef]
- Zitzler, E.; Laumanns, M.; Thiele, L. SPEA2: Improving the strength Pareto evolutionary algorithm. In TIK Repor 103, Proceedings of the Evolutionary Methods for Design, Optimization and Control with Applications to Industrial Problems, Athens, Greece, 19–21 September 2001; ETH Zurich, Computer Engineering and Networks Laboratory: Zurich, Switzerland, 2001; pp. 1–21. [Google Scholar]
- Feng, D.; Li, Y.; Liu, J.; Liu, Y. A particle swarm optimization algorithm based on modified crowding distance for multimodal multi-objective problems. Appl. Soft Comput. 2024, 152, 111280. [Google Scholar] [CrossRef]
- Cao, J.; Qi, Z.; Chen, Z.; Zhang, J. A multi-modal multi-objective evolutionary algorithm based on scaled niche distance. Appl. Soft Comput. 2024, 152, 111226. [Google Scholar] [CrossRef]
- Li, K.; Chen, R.; Fu, G.; Yao, X. Two-archive evolutionary algorithm for constrained multiobjective optimization. IEEE Trans. Evol. Comput. 2018, 23, 303–315. [Google Scholar] [CrossRef]
- Deng, S.; Li, Y.; Wang, J.; Cao, R.; Li, M. A feature-thresholds guided genetic algorithm based on a multi-objective feature scoring method for high-dimensional feature selection. Appl. Soft Comput. 2023, 148, 110765. [Google Scholar] [CrossRef]
- Yang, Y.; Huang, P.-Q.; Kong, X.; Zhao, J. A constrained multi-objective evolutionary algorithm assisted by an additional objective function. Appl. Soft Comput. 2023, 132, 109904. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, J.; Tan, S. A partition-based constrained multi-objective evolutionary algorithm. Swarm Evol. Comput. 2021, 66, 100940. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Parameters Setting |
|---|---|
| C-TAEA [55] | |
| PPS [16] | |
| DN-NSGA-II [34] | |
| MRPS [32] | |
| MMEA-WI [35] | |
| MTGA-CMMO |
| Problem | DN-NSGA-II-CDP | DN-NSGA-II-Epsilon | MRPS-CDP | MRPS-Epsilon | MMEA-WI-CDP | MMEA-WI-Epsilon | C-TAEA | PPS | CMMODE | MTGA-CMMO |
|---|---|---|---|---|---|---|---|---|---|---|
| CMMF1 | 9.2967 (7.96 ) − | 1.2214 (7.76 ) − | 1.1876 (4.59 ) − | 1.6004 (5.92 ) − | 6.2626 (4.77 ) − | 1.1279 (5.26 ) − | 3.6883 (1.40 ) + | 9.1591 (1.01 ) − | 5.2961 (3.52 ) − | 4.8796 (2.14 ) |
| CMMF2 | 7.2629 (4.53 ) − | 1.0367 (7.66 ) − | 8.7403 (1.52 ) − | 1.1392 (2.35 ) − | 6.8357 (4.78 ) − | 1.0345 (9.07 ) − | 4.4557 (1.48 ) + | 6.5334 (5.40 ) − | 5.6377 (4.38 ) = | 5.4308 (2.88 ) |
| CMMF3 | 1.0416 (5.84 ) − | 1.9681 (2.87 ) − | 7.7246 (9.96 ) − | 9.1336 (1.93 ) − | 8.0003 (9.30 ) − | 2.4947 (3.64 ) − | 1.1201 (1.04 ) − | 9.6998 (8.51 ) − | 5.5099 (3.14 ) − | 5.3280 (3.15 ) |
| CMMF4 | 6.3859 (3.73 ) − | 1.5535 (1.97 ) − | 7.4818 (1.07 ) − | 8.4758 (1.34 ) − | 6.8058 (3.89 ) − | 1.6097 (3.72 ) − | 7.0008 (1.07 ) − | 6.4582 (7.23 ) − | 5.6825 (3.05 ) − | 5.3478 (3.29 ) |
| CMMF5 | 3.7001 (3.26 ) − | 8.5807 (1.81 ) − | 3.6760 (2.38 ) − | 3.3264 (2.54 ) − | 3.5987 (2.36 ) − | 9.2461 (1.58 ) − | 3.0067 (2.60 ) = | 2.5482 (1.38 ) + | 3.0361 (2.17 ) = | 2.9636 (1.80 ) |
| CMMF6 | 2.9787 (2.77 ) − | 4.0393 (5.19 ) − | 2.4320 (2.11 ) − | 2.3970 (1.38 ) − | 2.5962 (2.25 ) − | 2.9791 (2.26 ) − | 1.3649 (6.07 ) + | 1.7318 (5.14 ) + | 1.9025 (8.79 ) − | 1.8069 (5.82 ) |
| CMMF7 | 1.0447 (1.13 ) − | 1.3203 (2.94 ) − | 9.9226 (1.49 ) − | 1.0035 (1.99 ) − | 9.4371 (1.58 ) − | 1.4170 (2.62 ) − | 6.8650 (6.49 ) − | 9.4925 (1.60 ) = | 6.0534 (3.83 ) = | 5.9114 (2.43 ) |
| CMMF8 | 2.3141 (1.19 ) − | 4.5898 (1.64 ) − | 2.3051 (1.33 ) − | 2.3409 (1.51 ) − | 2.5518 (1.24 ) − | 3.1866 (7.48 ) − | 1.3657 (1.34 ) + | 1.9479 (6.54 ) − | 1.9578 (9.20 ) = | 1.9039 (6.57 ) |
| CMMF9 | 2.1666 (1.11 ) − | 2.3600 (1.18 ) − | 2.5008 (2.21 ) − | 2.6113 (1.67 ) − | 2.6185 (2.11 ) − | 2.8657 (2.48 ) − | 1.3882 (3.58 ) + | 1.7154 (3.92 ) + | 1.9555 (6.70 ) = | 1.8717 (7.91 ) |
| CMMF10 | 2.4182 (9.61 ) − | 6.4483 (8.36 ) − | 3.5893 (4.34 ) − | 3.7705 (4.34 ) − | 3.4170 (2.20 ) − | 7.5719 (9.40 ) − | 4.5388 (1.33 ) − | 2.8676 (1.60 ) − | 2.9398 (1.50 ) − | 2.7995 (1.75 ) |
| CMMF11 | 4.9391 (6.97 ) − | 1.0081 (1.85 ) − | 5.6235 (8.11 ) − | 7.8024 (4.42 ) − | 4.6781 (2.54 ) − | 1.0138 (1.91 ) − | 7.7085 (4.94 ) − | 3.4431 (1.03 ) + | 4.4078 (7.03 ) − | 3.9739 (3.77 ) |
| CMMF12 | 5.1439 (1.13 ) − | 3.5236 (1.15 ) − | 2.2837 (1.92 ) − | 2.5174 (2.15 ) − | 2.4797 (1.31 ) − | 2.8224 (7.74 ) − | 1.3566 (1.21 ) + | 1.9099 (6.20 ) = | 2.0130 (7.73 ) − | 1.9440 (6.51 ) |
| CMMF13 | 4.1862 (4.40 ) − | 3.8572 (4.00 ) − | 7.2704 (1.35 ) − | 8.8674 (2.46 ) − | 4.6420 (4.52 ) − | 5.4349 (4.97 ) − | 3.3323 (3.95 ) + | 3.0362 (1.05 ) + | 3.5518 (1.96 ) = | 3.5724 (1.87 ) |
| CMMF14 | 3.8776 (1.08 ) − | 4.3509 (1.06 ) − | 3.6620 (4.98 ) − | 4.6795 (7.89 ) − | 5.1048 (4.50 ) − | 4.1870 (7.88 ) − | 2.5320 (2.44 ) + | 2.4994 (6.54 ) + | 3.9718 (1.11 ) − | 3.2643 (2.94 ) |
| CMMF15 | 5.0715 (3.54 ) − | 1.4685 (1.36 ) − | 4.8295 (5.27 ) − | 5.0213 (5.30 ) − | 6.2789 (5.04 ) − | 1.3756 (1.66 ) − | 5.4931 (1.29 ) − | 4.0184 (2.58 ) = | 4.0782 (1.95 ) = | 3.9931 (3.20 ) |
| CMMF16 | 2.3521 (2.94 ) − | 4.3821 (5.98 ) − | 2.6262 (3.11 ) − | 3.1470 (6.98 ) − | 2.2696 (1.82 ) − | 4.3804 (8.29 ) − | 1.8265 (2.65 ) = | 3.7091 (4.16 ) − | 1.8890 (1.379 ) − | 1.7651 (7.32 ) |
| CMMF17 | 1.4709 (8.75 ) − | 2.7018 (1.26 ) − | 1.5562 (1.65 ) − | 2.0102 (2.67 ) − | 1.7915 (1.30 ) − | 3.4565 (7.64 ) − | 1.0852 (1.41 ) + | 1.4598 (1.34 ) − | 1.3465 (6.23 ) − | 1.1690 (3.88 ) |
| CMMOP1 | 7.4703 (4.38 ) − | 1.0488 (7.72 ) − | 8.4974 (6.20 ) − | 8.9947 (7.00 ) − | 6.9937 (4.93 ) − | 1.7400 (8.21 ) − | 6.4392 (5.82 ) − | 6.1653 (3.10 ) − | 6.7131 (2.76 ) − | 5.3383 (2.51 ) |
| CMMOP2 | 1.1097 (7.65 ) − | 1.1439 (8.42 ) = | 1.1003 (1.91 ) − | 3.2174 (2.09 ) − | 1.0038 (1.16 ) − | 1.3780 (1.06 ) − | 1.2007 (5.54 ) − | 6.1830 (5.10 ) + | 6.7670 (3.93 ) − | 6.7338 (1.14 ) |
| CMMOP3 | 7.1893 (2.98 ) − | 1.5754 (7.89 ) − | 8.0897 (4.59 ) − | 8.4557 (5.21 ) − | 7.1815 (6.29 ) − | 1.1116 (7.62 ) − | 5.7780 (4.35 ) − | 6.8275 (6.74 ) − | 1.2604 (8.36 ) − | 5.3735 (1.68 ) |
| CMMOP4 | 1.0291 (4.55 ) + | 9.0852 (7.58 ) + | 1.0351 (2.03 ) = | 1.0357 (3.29 ) = | 1.0268 (3.96 ) + | 9.0817 (8.58 ) + | 1.0377 (8.87 ) = | 1.0374 (1.93 ) = | 1.0601 (3.59 ) = | 1.0531 (2.88 ) |
| CMMOP5 | 6.0286 (4.48 ) − | 2.0866 (8.49 ) − | 6.2854 (7.04 ) − | 6.3228 (9.48 ) − | 4.9302 (3.25 ) = | 4.4158 (3.79 ) − | 3.9023 (4.79 ) + | 6.5248 (9.76 ) − | 5.3330 (2.75 ) − | 4.8651 (3.45 ) |
| CMMOP6 | 1.0470 (1.43 ) + | 1.0309 (3.72 ) + | 1.0861 (5.34 ) = | 1.2400 (1.78 ) − | 1.0477 (3.40 ) + | 1.0390 (2.15 ) + | 1.0589 (1.72 ) = | 1.0503 (2.52 ) = | 1.0786 (3.73 ) = | 1.0777 (4.55 ) |
| CMMOP7 | 8.3220 (3.55 ) − | 1.4203 (8.52 ) = | 1.0021 (7.37 ) − | 1.0475 (8.44 ) − | 9.7509 (7.62 ) − | 1.4146 (7.36 ) = | 7.9168 (5.21 ) − | 8.1703 (5.39 ) − | 3.2404 (6.32 ) − | 6.9729 (2.19 ) |
| CMMOP8 | 6.3606 (4.32 ) − | 2.2700 (1.35 ) − | 6.0683 (6.17 ) − | 6.1497 (7.00 ) − | 6.4407 (9.27 ) − | 1.8586 (9.66 ) − | 4.0286 (1.73 ) + | 6.2601 (5.74 ) − | 5.3013 (3.69 ) − | 4.6826 (3.06 ) |
| CMMOP9 | 6.3587 (3.19 ) − | 9.8536 (6.61 ) − | 7.4770 (5.89 ) − | 7.2024 (6.37 ) − | 6.2420 (3.78 ) − | 8.1202 (4.98 ) − | 3.9268 (3.23 ) + | 5.7185 (5.19 ) − | 5.7122 (3.69 ) − | 4.9626 (1.76 ) |
| CMMOP10 | 5.3291 (6.27 ) − | 1.0233 (3.71 ) − | 7.7381 (1.15 ) − | 7.6587 (7.47 ) − | 5.9153 (5.54 ) − | 1.0428 (4.07 ) − | 3.5166 (1.29 ) + | 5.1528 (5.00 ) − | 5.2524 (3.31 ) − | 4.6691 (2.61 ) |
| CMMOP11 | 9.5011 (5.42 ) − | 3.7036 (3.48 ) − | 1.4897 (1.51 ) − | 2.1053 (3.04 ) − | 9.1192 (6.28 ) − | 3.3391 (1.20 ) − | 9.7707 (6.85 ) − | 6.8229 (2.68 ) − | 1.0273 (1.46 ) − | 6.2979 (2.89 ) |
| CMMOP12 | 8.3553 (4.34 ) − | 1.1834 (1.20 ) − | 1.3817 (1.30 ) − | 1.8620 (2.05 ) − | 1.0931 (1.05 ) − | 7.6453 (1.08 ) − | 7.2634 (3.35 ) − | 6.0760 (2.75 ) + | 1.0599 (1.21 ) − | 6.2736 (2.61 ) |
| CMMOP13 | 7.5756 (4.69 ) − | 1.2705 (8.39 ) − | 8.5514 (5.43 ) − | 8.8509 (6.34 ) − | 6.9558 (4.65 ) − | 1.4466 (7.66 ) − | 6.6750 (5.68 ) − | 6.2855 (2.76 ) − | 7.0711 (3.75 ) − | 5.3416 (2.10 ) |
| CMMOP14 | 8.2301 (3.43 ) − | 6.4814 (3.27 ) − | 8.7533 (4.50 ) − | 9.2627 (6.94 ) − | 7.3968 (5.39 ) − | 7.0643 (4.09 ) − | 7.7750 (4.71 ) − | 6.4324 (2.71 ) − | 7.6243 (4.37 ) − | 5.5061 (2.23 ) |
| +/−/= | 2/29/0 | 2/27/2 | 0/29/2 | 0/30/1 | 2/28/1 | 2/28/1 | 13/14/4 | 8/18/5 | 0/22/9 |
| Problem | DN-NSGA-II-CDP | DN-NSGA-II-Epsilon | MRPS-CDP | MRPS-Epsilon | MMEA-WI-CDP | MMEA-WI-Epsilon | C-TAEA | PPS | CMMODE | MTGA-CMMO |
|---|---|---|---|---|---|---|---|---|---|---|
| CMMF1 | 1.0830 (7.06 ) = | 8.6562 (4.17 ) = | 1.2771 (4.74 ) − | 1.8086 (5.56 ) − | 7.4451 (2.79 ) + | 6.9631 (3.02 ) = | 1.2623 (3.61 ) − | 3.4092 (8.60 ) − | 2.9499 (2.69 ) + | 7.8217 (3.18 ) |
| CMMF2 | 3.0064 (4.41 ) − | 3.9545 (5.33 ) − | 2.9634 (3.21 ) − | 3.6396 (8.56 ) − | 2.6475 (2.21 ) = | 4.0739 (4.06 ) − | 2.3177 (1.07 ) − | 6.6569 (6.24 ) − | 3.1184 (6.33 ) − | 2.5860 (2.53 ) |
| CMMF3 | 3.4633 (8.17 ) = | 3.4979 (4.87 ) − | 1.7194 (2.44 ) = | 4.0446 (1.45 ) − | 1.9190 (1.50 ) − | 4.2701 (5.96 ) − | 1.8438 (2.00 ) − | 6.3166 (1.73 ) − | 1.6698 (1.84 ) = | 1.7117 (1.79 ) |
| CMMF4 | 2.1777 (1.38 ) − | 4.4922 (1.21 ) − | 3.4416 (1.08 ) − | 7.4282 (5.28 ) − | 2.3807 (1.28 ) − | 4.6453 (4.98 ) − | 7.9266 (7.95 ) − | 1.0163 (6.53 ) − | 2.1897 (1.56 ) − | 2.0717 (1.44 ) |
| CMMF5 | 4.7442 (6.87 ) − | 3.5223 (6.09 ) − | 1.7808 (1.77 ) − | 5.2721 (1.75 ) − | 1.5938 (1.37 ) − | 3.4315 (3.75 ) − | 3.6940 (2.08 ) − | 3.1269 (2.14 ) − | 1.3738 (1.42 ) = | 1.4004 (1.17 ) |
| CMMF6 | 1.8493 (1.52 ) − | 2.3934 (2.51 ) − | 2.0669 (2.00 ) − | 2.0134 (3.68 ) − | 1.5077 (1.25 ) + | 1.8862 (1.41 ) − | 5.1165 (6.62 ) = | 2.8970 (2.74 ) − | 3.5158 (2.89 ) − | 1.6277 (1.70 ) |
| CMMF7 | 1.8236 (2.05 ) − | 3.1646 (4.68 ) − | 1.8447 (1.69 ) − | 1.7817 (1.74 ) = | 2.0451 (1.29 ) − | 3.1696 (9.13 ) − | 8.0975 (1.28 ) − | 2.8232 (3.61 ) − | 1.7862 (1.49 ) = | 1.7017 (1.52 ) |
| CMMF8 | 3.8639 (1.48 ) = | 6.4425 (1.19 ) − | 7.2328 (6.97 ) − | 7.1567 (4.54 ) − | 8.3809 (5.06 ) − | 5.3496 (8.70 ) − | 6.4995 (1.44 ) − | 5.3025 (2.80 ) − | 7.0849 (8.56 ) − | 6.3266 (2.63 ) |
| CMMF9 | 1.0216 (2.44 ) = | 5.2581 (2.34 ) = | 5.7614 (3.14 ) − | 6.3618 (6.00 ) − | 6.8937 (6.48 ) − | 7.4924 (1.26 ) − | 4.4183 (3.14 ) − | 4.6749 (3.06 ) − | 6.2928 (1.69 ) − | 5.2460 (3.44 ) |
| CMMF10 | 1.2660 (1.18 ) = | 2.4519 (3.90 ) − | 1.5188 (1.80 ) − | 3.4581 (5.14 ) − | 1.4441 (1.01 ) − | 2.7352 (5.11 ) − | 1.9690 (1.59 ) − | 3.2129 (1.61 ) − | 1.3011 (9.93 ) = | 1.2497 (8.43 ) |
| CMMF11 | 3.8356 (6.09 ) − | 1.9238 (3.77 ) − | 2.2802 (1.21 ) − | 1.6883 (1.30 ) − | 1.0877 (9.42 ) − | 2.0589 (2.06 ) − | 4.0135 (1.20 ) − | 1.4177 (2.11 ) − | 1.0919 (9.09 ) − | 9.5716 (7.87 ) |
| CMMF12 | 6.6881 (1.53 ) − | 3.5177 (8.18 ) − | 2.0743 (4.99 ) − | 8.9484 (1.32 ) − | 8.4790 (6.12 ) − | 2.7395 (3.62 ) − | 1.5972 (2.15 ) − | 2.7746 (1.35 ) − | 7.7346 (7.26 ) − | 6.9204 (5.04 ) |
| CMMF13 | 3.7735 (5.15 ) = | 1.3548 (8.15 ) − | 1.3416 (2.69 ) − | 1.4742 (4.38 ) − | 7.8750 (4.85 ) = | 5.1743 (6.00 ) − | 7.3996 (8.22 ) − | 3.0376 (1.62 ) − | 1.4385 (2.04 ) − | 7.4532 (7.47 ) |
| CMMF14 | 1.5146 (3.10 ) − | 5.2693 (1.59 ) − | 4.6779 (4.59 ) = | 5.8133 (6.98 ) − | 6.3431 (5.00 ) − | 1.5795 (3.62 ) − | 3.0043 (3.46 ) − | 6.3234 (2.62 ) − | 5.5312 (1.15 ) − | 4.6091 (3.93 ) |
| CMMF15 | 4.3896 (1.21 ) − | 3.0521 (1.12 ) − | 5.9979 (1.86 ) − | 2.8164 (1.86 ) − | 1.0513 (5.02 ) − | 2.2944 (1.43 ) − | 8.1945 (2.97 ) − | 9.0175 (4.47 ) − | 7.8701 (2.77 ) − | 4.7162 (5.73 ) |
| CMMF16 | 6.0094 (5.39 ) − | 1.8116 (8.28 ) − | 6.2757 (1.38 ) − | 1.0760 (3.71 ) − | 2.7310 (1.78 ) − | 1.8164 (3.37 ) − | 5.8692 (3.45 ) − | 9.1101 (3.43 ) − | 1.3505 (4.23 ) − | 2.4193 (2.31 ) |
| CMMF17 | 3.4862 (9.55 ) − | 3.3044 (9.25 ) − | 4.1291 (8.85 ) − | 1.5252 (5.51 ) − | 2.6121 (2.71 ) + | 3.2463 (9.88 ) − | 4.5470 (3.03 ) = | 3.8877 (8.58 ) − | 6.9368 (3.31 ) − | 3.0234 (5.78 ) |
| CMMOP1 | 7.2170 (2.87 ) − | 7.6454 (8.07 ) − | 8.9924 (7.51 ) − | 1.2490 (1.56 ) − | 6.9218 (2.16 ) = | 6.9859 (7.20 ) = | 1.2005 (3.13 ) − | 1.6188 (5.09 ) − | 8.1839 (3.16 ) − | 6.7959 (2.56 ) |
| CMMOP2 | 5.8105 (3.53 ) − | 5.0546 (4.27 ) − | 2.0085 (4.72 ) = | 8.9831 (4.26 ) − | 2.2155 (8.91 ) = | 1.7498 (5.80 ) + | 8.1982 (4.20 ) − | 1.5910 (6.96 ) − | 1.7277 (2.51 ) = | 2.0920 (8.15 ) |
| CMMOP3 | 1.3053 (6.22 ) − | 1.3454 (1.24 ) − | 1.6324 (2.10 ) − | 2.2802 (3.74 ) − | 1.0789 (4.72 ) + | 1.1249 (8.17 ) + | 2.0636 (4.35 ) − | 2.7491 (4.32 ) − | 6.0561 (1.27 ) − | 1.2052 (5.69 ) |
| CMMOP4 | 4.3800 (5.85 ) − | 7.5722 (1.45 ) − | 9.4876 (2.25 ) − | 2.0662 (6.25 ) − | 3.6649 (2.01 ) = | 7.0901 (1.38 ) − | 1.3421 (4.80 ) − | 2.0092 (7.60 ) − | 1.5635 (3.91 ) − | 3.8025 (3.01 ) |
| CMMOP5 | 1.0606 (1.77 ) − | 1.6664 (5.74 ) − | 3.1553 (1.02 ) − | 5.8575 (1.84 ) − | 8.3948 (7.19 ) + | 2.5759 (1.38 ) − | 9.9951 (3.68 ) − | 1.1020 (4.41 ) − | 5.8120 (2.83 ) − | 9.0748 (1.12 ) |
| CMMOP6 | 5.4838 (5.09 ) − | 4.2890 (4.74 ) − | 1.4571 (2.86 ) + | 4.2791 (3.70 ) − | 1.5835 (3.71 ) = | 1.9733 (1.47 ) − | 7.8047 (3.44 ) − | 1.4674 (3.72 ) − | 3.0621 (1.94 ) − | 1.9053 (6.28 ) |
| CMMOP7 | 1.1924 (6.47 ) − | 1.1803 (7.98 ) − | 1.4295 (1.76 ) − | 1.9317 (2.73 ) − | 9.5075 (3.87 ) + | 9.8018 (6.31 ) + | 2.0965 (3.43 ) − | 2.1759 (2.34 ) − | 7.0134 (4.46 ) − | 1.0783 (5.54 ) |
| CMMOP8 | 2.7548 (1.69 ) = | 7.8138 (3.44 ) − | 6.4008 (2.52 ) − | 6.9071 (1.86 ) − | 3.0718 (1.69 ) − | 7.1433 (2.72 ) − | 6.6548 (1.84 ) − | 9.7853 (5.05 ) − | 3.1092 (2.28 ) − | 2.7043 (1.53 ) |
| CMMOP9 | 6.9497 (2.20 ) − | 7.1125 (3.78 ) − | 9.4871 (1.37 ) − | 1.1485 (1.99 ) − | 6.6395 (3.06 ) − | 6.8850 (6.34 ) − | 1.0116 (1.76 ) − | 1.5413 (5.47 ) − | 7.6829 (3.99 ) − | 6.4313 (2.14 ) |
| CMMOP10 | 5.3780 (5.48 ) = | 6.4282 (8.57 ) − | 8.2822 (2.30 ) − | 1.3834 (4.11 ) − | 5.4036 (2.89 ) − | 6.3319 (6.14 ) − | 9.4199 (4.99 ) − | 1.6430 (7.41 ) − | 6.2487 (3.17 ) − | 5.1718 (2.43 ) |
| CMMOP11 | 1.1005 (5.93 ) − | 1.8644 (2.29 ) − | 1.7456 (1.82 ) − | 2.7020 (4.94 ) − | 1.0138 (5.93 ) − | 1.8037 (3.02 ) − | 1.9046 (5.52 ) − | 2.1467 (6.94 ) − | 1.2420 (9.34 ) − | 9.4769 (3.40 ) |
| CMMOP12 | 1.5576 (4.62 ) − | 1.4389 (2.38 ) − | 1.9414 (2.59 ) − | 3.9282 (8.64 ) − | 1.1186 (1.02 ) = | 1.1545 (1.86 ) = | 3.6138 (8.92 ) − | 5.2785 (1.10 ) − | 1.4344 (2.09 ) − | 1.1658 (1.70 ) |
| CMMOP13 | 7.4174 (3.06 ) − | 7.9406 (7.47 ) − | 9.2540 (1.35 ) − | 1.2291 (1.64 ) − | 6.9285 (2.01 ) − | 7.0371 (7.00 ) = | 1.2231 (3.20 ) − | 1.7390 (3.91 ) − | 8.4145 (5.49 ) − | 6.6456 (2.64 ) |
| CMMOP14 | 7.6405 (3.05 ) − | 6.9473 (2.31 ) − | 9.1532 (9.80 ) − | 1.2137 (1.45 ) − | 7.0439 (1.96 ) − | 6.5676 (3.59 ) + | 1.3596 (3.96 ) − | 1.7637 (4.86 ) − | 8.6605 (3.84 ) − | 6.7299 (2.81 ) |
| +/−/= | 0/23/8 | 0/29/2 | 1/27/3 | 0/30/1 | 6/18/7 | 4/23/4 | 0/29/2 | 0/31/0 | 1/25/5 |
| Problem | DN-NSGA-II-CDP | DN-NSGA-II-Epsilon | MRPS-CDP | MRPS-Epsilon | MMEA-WI-CDP | MMEA-WI-Epsilon | C-TAEA | PPS | CMMODE | MTGA-CMMO |
|---|---|---|---|---|---|---|---|---|---|---|
| CMMF1 | 1.1281 (4.01 ) = | 1.5385 (9.14 ) = | 8.3981 (2.36 ) − | 5.8580 (1.85 ) − | 1.3193 (4.95 ) + | 1.7883 (8.94 ) = | 8.3315 (2.19 ) − | 3.0695 (8.55 ) − | 5.4483 (2.48 ) + | 1.2452 (5.14 ) |
| CMMF2 | 3.3827 (4.19 ) − | 2.5761 (3.78 ) − | 3.3952 (3.57 ) − | 2.8304 (6.60 ) − | 3.7895 (3.29 ) = | 2.4500 (2.47 ) − | 5.1732 (6.56 ) − | 1.9777 (7.97 ) − | 3.2529 (5.44 ) − | 3.8560 (4.29 ) |
| CMMF3 | 5.7129 (1.37 ) = | 2.9091 (3.82 ) − | 5.8932 (7.99 ) = | 2.6628 (8.50 ) − | 5.2369 (3.91 ) − | 2.3778 (3.33 ) − | 1.6036 (1.69 ) − | 4.3239 (2.08 ) − | 6.0107 (7.09 ) = | 5.8784 (5.69 ) |
| CMMF4 | 4.6093 (2.88 ) − | 2.4446 (8.83 ) − | 3.0996 (7.51 ) − | 1.7475 (7.83 ) − | 4.1946 (2.14 ) − | 2.1696 (2.38 ) − | 2.1412 (1.28 ) − | 1.2887 (5.91 ) − | 4.5123 (3.19 ) − | 4.8006 (3.27 ) |
| CMMF5 | 5.5468 (2.58 ) − | 2.9455 (6.71 ) − | 5.6653 (5.41 ) − | 1.9032 (3.32 ) − | 6.3170 (5.24 ) − | 2.9475 (3.22 ) − | 5.3289 (1.06 ) − | 9.9218 (1.64 ) − | 7.3582 (8.13 ) = | 7.1876 (6.01 ) |
| CMMF6 | 5.4433 (4.57 ) − | 4.2229 (4.50 ) − | 4.8774 (4.68 ) − | 5.0609 (6.18 ) − | 6.6748 (5.36 ) + | 5.3306 (4.07 ) − | 6.4774 (4.79 ) = | 4.6628 (1.61 ) − | 3.9489 (1.58 ) − | 6.2104 (6.79 ) |
| CMMF7 | 5.5474 (6.25 ) = | 3.2266 (4.84 ) − | 5.4622 (5.00 ) − | 5.6597 (5.33 ) = | 4.8894 (3.01 ) − | 3.3143 (7.21 ) − | 4.9086 (4.72 ) − | 2.0342 (2.40 ) − | 5.5789 (4.79 ) = | 5.8894 (5.21 ) |
| CMMF8 | 1.4885 (3.56 ) = | 1.6021 (2.87 ) − | 1.3887 (1.28 ) − | 1.3932 (9.09 ) − | 1.1912 (6.75 ) − | 1.9239 (3.58 ) − | 4.1201 (3.02 ) − | 6.2805 (1.19 ) − | 1.3971 (1.66 ) − | 1.5651 (6.77 ) |
| CMMF9 | 1.7022 (7.16 ) = | 1.9054 (8.60 ) = | 1.7366 (9.63 ) − | 1.5700 (1.49 ) − | 1.4511 (1.24 ) − | 1.3528 (1.83 ) − | 8.7429 (1.37 ) − | 1.4956 (3.03 ) − | 1.6267 (3.28 ) − | 1.8830 (1.19 ) |
| CMMF10 | 7.9581 (6.78 ) = | 4.2150 (9.31 ) − | 6.6689 (7.68 ) − | 4.3907 (1.52 ) − | 6.9572 (5.00 ) − | 3.7612 (6.03 ) − | 2.4398 (3.15 ) − | 1.0089 (2.16 ) − | 7.7043 (5.80 ) = | 8.0104 (5.53 ) |
| CMMF11 | 7.8285 (4.32 ) − | 8.3876 (1.06 ) − | 5.0220 (1.79 ) − | 9.4640 (9.39 ) − | 9.1864 (7.25 ) − | 4.8767 (4.80 ) − | 1.0865 (5.40 ) − | 2.9803 (2.62 ) − | 8.8801 (8.06 ) − | 1.0359 (9.34 ) |
| CMMF12 | 1.0747 (5.31 ) − | 9.9805 (6.34 ) − | 1.0005 (2.87 ) − | 1.1380 (1.53 ) − | 1.1849 (8.53 ) − | 9.7183 (5.55 ) − | 6.7052 (7.74 ) − | 9.8200 (2.09 ) − | 1.3013 (1.19 ) − | 1.4509 (9.85 ) |
| CMMF13 | 1.0245 (6.16 ) = | 2.0001 (3.04 ) − | 7.6809 (1.57 ) − | 7.2227 (1.83 ) − | 1.2721 (7.76 ) = | 6.3219 (4.08 ) − | 2.8395 (2.48 ) − | 7.4493 (1.21 ) − | 9.9572 (2.96 ) − | 1.3484 (1.36 ) |
| CMMF14 | 1.7128 (8.61 ) − | 1.5076 (1.12 ) − | 2.1480 (2.15 ) = | 1.7320 (1.93 ) − | 1.5754 (1.30 ) − | 9.9397 (1.80 ) − | 1.3826 (1.41 ) − | 1.4226 (3.85 ) − | 1.8449 (3.53 ) − | 2.1607 (1.70 ) |
| CMMF15 | 1.6434 (5.76 ) − | 1.3059 (3.46 ) − | 1.7634 (4.34 ) − | 4.6535 (2.43 ) − | 1.0754 (3.49 ) − | 3.3304 (4.93 ) − | 1.3231 (3.86 ) − | 1.2973 (4.63 ) − | 1.3678 (4.06 ) − | 2.1077 (2.65 ) |
| CMMF16 | 5.4190 (6.73 ) − | 5.3866 (2.98 ) − | 1.6393 (3.92 ) − | 9.5751 (3.60 ) − | 3.6509 (2.47 ) − | 5.5066 (1.01 ) − | 1.4419 (7.11 ) − | 7.8463 (5.51 ) − | 7.5289 (2.48 ) − | 4.1348 (4.03 ) |
| CMMF17 | 3.0191 (6.06 ) = | 4.3921 (6.69 ) − | 2.4568 (4.90 ) − | 6.8391 (3.40 ) − | 3.8602 (3.61 ) + | 5.8945 (9.80 ) − | 2.6904 (1.09 ) − | 2.4522 (1.13 ) − | 1.65414 (6.53 ) − | 3.3852 (6.19 ) |
| CMMOP1 | 1.3874 (5.51 ) − | 1.3214 (1.35 ) − | 1.1070 (8.50 ) − | 7.8770 (1.08 ) − | 1.4437 (4.59 ) = | 1.4427 (1.39 ) = | 8.5536 (1.92 ) − | 6.3517 (1.69 ) − | 1.2137 (4.59 ) − | 1.4634 (5.40 ) |
| CMMOP2 | 2.1102 (1.17 ) − | 3.5669 (2.25 ) − | 4.9379 (8.92 ) = | 1.2829 (7.33 ) − | 4.9387 (1.35 ) = | 6.1929 (1.60 ) + | 1.4545 (7.75 ) − | 7.9150 (4.38 ) − | 5.8662 (7.69 ) = | 5.2218 (1.53 ) |
| CMMOP3 | 7.6719 (3.60 ) − | 7.4863 (6.78 ) − | 6.0420 (7.76 ) − | 4.1956 (8.60 ) − | 9.2675 (3.97 ) + | 8.9249 (6.46 ) + | 4.7809 (9.73 ) − | 3.6121 (6.51 ) − | 1.15991 (2.99 ) − | 8.2449 (3.72 ) |
| CMMOP4 | 2.3192 (2.87 ) − | 1.3852 (3.60 ) − | 1.0723 (2.34 ) − | 4.9611 (2.15 ) − | 2.7302 (1.42 ) + | 1.4859 (4.42 ) − | 7.9857 (2.46 ) − | 5.2429 (1.42 ) − | 6.7603 (1.84 ) − | 2.6214 (2.06 ) |
| CMMOP5 | 9.6176 (1.45 ) − | 6.8357 (2.62 ) − | 3.1639 (1.11 ) − | 1.6646 (6.63 ) − | 1.1920 (9.95 ) + | 6.0505 (4.30 ) − | 8.9117 (3.06 ) − | 8.7083 (4.42 ) − | 2.0983 (1.03 ) − | 1.0987 (1.38 ) |
| CMMOP6 | 2.6362 (1.61 ) − | 3.6082 (1.70 ) − | 6.9578 (9.65 ) + | 2.9358 (1.09 ) − | 6.5341 (1.06 ) = | 6.9879 (2.82 ) + | 1.3120 (6.12 ) − | 7.1864 (2.87 ) − | 4.0449 (1.65 ) − | 5.5005 (1.75 ) |
| CMMOP7 | 8.3995 (4.73 ) − | 8.5059 (5.54 ) − | 6.9413 (7.67 ) − | 5.0039 (7.95 ) − | 1.0507 (4.16 ) + | 1.0219 (6.57 ) + | 4.5239 (9.63 ) − | 4.4835 (6.73 ) − | 8.1939 (7.65 ) − | 9.1943 (4.55 ) |
| CMMOP8 | 3.6424 (2.14 ) = | 1.7183 (1.07 ) − | 1.6429 (6.25 ) − | 1.4478 (3.97 ) − | 3.2560 (1.75 ) − | 1.6842 (8.05 ) − | 1.5468 (5.18 ) − | 1.1769 (4.73 ) − | 3.2175 (2.28 ) − | 3.7025 (2.09 ) |
| CMMOP9 | 1.4398 (4.61 ) − | 1.4090 (7.01 ) − | 1.0457 (1.49 ) − | 8.6446 (1.60 ) − | 1.5071 (6.49 ) − | 1.4592 (1.19 ) − | 9.8716 (1.74 ) − | 6.5821 (2.01 ) − | 1.2888 (6.35 ) − | 1.5449 (4.87 ) |
| CMMOP10 | 1.8763 (1.81 ) = | 1.5813 (2.11 ) − | 1.2516 (2.71 ) − | 7.3361 (2.15 ) − | 1.8512 (9.80 ) − | 1.5875 (1.46 ) − | 1.2147 (3.92 ) − | 6.7149 (2.53 ) − | 1.5867 (8.27 ) − | 1.9232 (9.15 ) |
| CMMOP11 | 9.0907 (4.79 ) − | 5.4663 (9.04 ) − | 5.6851 (5.86 ) − | 3.5535 (7.59 ) − | 9.8805 (5.58 ) − | 5.7618 (1.53 ) − | 5.3411 (1.35 ) − | 4.7655 (1.57 ) − | 8.0768 (7.22 ) − | 1.0523 (3.78 ) |
| CMMOP12 | 6.7522 (1.66 ) − | 7.1289 (1.17 ) − | 5.0606 (7.50 ) − | 2.4436 (5.98 ) − | 8.9942 (7.88 ) = | 8.8270 (1.22 ) = | 2.7194 (7.33 ) − | 1.7815 (4.54 ) − | 7.1164 (1.10 ) − | 8.6462 (1.19 ) |
| CMMOP13 | 1.3502 (5.55 ) − | 1.2706 (1.27 ) − | 1.0783 (1.46 ) − | 7.9266 (1.12 ) − | 1.4421 (4.08 ) − | 1.4315 (1.35 ) = | 8.3687 (1.74 ) − | 5.6008 (1.70 ) − | 1.1835 (7.88 ) − | 1.4976 (6.16 ) |
| CMMOP14 | 1.3092 (4.98 ) − | 1.4401 (4.82 ) − | 1.0907 (1.06 ) − | 8.1026 (1.00 ) − | 1.4194 (3.88 ) − | 1.5239 (7.57 ) + | 7.5031 (1.81 ) − | 5.8310 (1.73 ) − | 1.1459 (5.25 ) − | 1.4803 (6.21 ) |
| +/−/= | 0/21/10 | 0/29/2 | 1/27/3 | 0/30/1 | 7/18/6 | 5/22/4 | 0/30/1 | 0/31/0 | 1/25/5 |
| Problem | MTGA-CMMO-V1 | MTGA-CMMO-V2 | MTGA-CMMO-V3 | MTGA-CMMO-V4 | MTGA-CMMO-V5 | MTGA-CMMO |
|---|---|---|---|---|---|---|
| CMMF1 | 7.4737 (2.26 ) − | 7.0340 (2.51 ) = | 7.0478 (2.10 ) = | 7.3367 (1.90 ) − | 7.5422 (1.99 ) − | 7.0460 (1.78 ) |
| CMMF2 | 1.6349 (1.69 ) = | 1.5434 (1.65 ) = | 1.6278 (1.46 ) = | 1.5318 (1.44 ) = | 1.5688 (1.49 ) = | 1.5533 (1.06 ) |
| CMMF3 | 1.0467 (7.88 ) = | 1.0310 (8.70 ) = | 1.0448 (7.94 ) = | 1.0247 (7.94 ) = | 1.0582 (9.35 ) = | 1.0136 (7.48 ) |
| CMMF4 | 1.2469 (5.93 ) = | 1.2557 (6.80 ) = | 1.2427 (5.43 ) = | 1.2299 (4.60 ) = | 1.2236 (4.74 ) = | 1.2177 (4.72 ) |
| CMMF5 | 8.1636 (5.48 ) − | 7.9052 (5.45 ) = | 8.2119 (5.19 ) − | 8.1911 (5.44 ) − | 7.9942 (4.79 ) = | 7.7269 (5.84 ) |
| CMMF6 | 1.0769 (8.90 ) − | 1.0331 (8.44 ) = | 1.0326 (7.23 ) − | 1.0637 (1.02 ) − | 1.0111 (9.77 ) = | 9.8954 (6.13 ) |
| CMMF7 | 1.1031 (8.57 ) = | 1.0354 (7.83 ) = | 1.0476 (7.98 ) = | 1.0539 (4.74 ) = | 1.0142 (7.27 ) + | 1.0600 (7.86 ) |
| CMMF8 | 3.6832 (1.44 ) = | 3.6402 (9.96 ) = | 3.6383 (1.58 ) = | 3.6189 (1.19 ) = | 3.4708 (1.10 ) + | 3.6121 (1.52 ) |
| CMMF9 | 3.2177 (1.46 ) − | 2.9785 (1.35 ) = | 2.9851 (1.21 ) = | 2.9980 (1.56 ) = | 3.0448 (1.42 ) = | 3.0276 (1.78 ) |
| CMMF10 | 7.9716 (5.20 ) = | 7.6641 (4.50 ) = | 7.8615 (6.00 ) = | 7.6732 (5.91 ) = | 7.5794 (5.53 ) = | 7.8563 (6.23 ) |
| CMMF11 | 6.3617 (3.28 ) = | 6.4003 (5.27 ) = | 6.3819 (4.11 ) = | 6.1927 (5.38 ) = | 6.2740 (4.64 ) = | 6.3504 (4.10 ) |
| CMMF12 | 4.2619 (2.04 ) = | 4.1286 (2.26 ) + | 4.1526 (1.96 ) = | 4.2009 (1.99 ) = | 4.1451 (2.10 ) = | 4.2626 (2.43 ) |
| CMMF13 | 4.6510 (5.34 ) = | 4.4461 (4.86 ) = | 4.3816 (5.58 ) = | 4.4353 (3.94 ) = | 4.6890 (5.76 ) = | 4.5413 (5.11 ) |
| CMMF14 | 2.9241 (2.51 ) − | 2.4730 (2.16 ) = | 2.5879 (1.97 ) − | 2.5218 (1.86 ) = | 2.7017 (2.13 ) − | 2.4726 (1.50 ) |
| CMMF15 | 3.6034 (4.07 ) − | 3.5779 (5.04 ) − | 3.3340 (4.20 ) = | 3.8691 (4.86 ) - | 3.3916 (3.68 ) = | 3.2063 (4.78 ) |
| CMMF16 | 1.4674 (1.48 ) − | 1.3370 (1.18 ) − | 1.3143 (6.30 ) − | 1.3173 (7.41 ) − | 1.5530 (1.67 ) − | 1.2512 (7.21 ) |
| CMMF17 | 2.1326 (3.85 ) − | 1.8632 (2.98 ) = | 1.9846 (2.97 ) − | 2.2464 (3.07 ) − | 2.1607 (5.42 ) − | 1.8100 (3.90 ) |
| CMMOP1 | 4.2209 (8.16 ) − | 4.3156 (1.10 ) − | 4.3708 (9.56 ) − | 4.1852 (7.84 ) − | 4.4888 (1.60 ) − | 4.1093 (9.83 ) |
| CMMOP2 | 1.2929 (9.76 ) − | 1.5051 (4.88 ) − | 1.5351 (6.03 ) − | 1.3547 (1.54 ) − | 1.4194 (5.17 ) − | 1.0865 (6.50 ) |
| CMMOP3 | 7.5887 (2.33 ) = | 7.6169 (3.71 ) = | 7.6195 (3.42 ) = | 7.5367 (3.41 ) = | 8.3770 (4.82 ) − | 7.4812 (3.48 ) |
| CMMOP4 | 1.9531 (1.43 ) − | 1.9294 (1.05 ) − | 1.9195 (1.63 ) = | 1.8545 (1.49 ) = | 2.1985 (2.16 ) − | 1.8358 (1.41 ) |
| CMMOP5 | 4.4711 (4.76 ) = | 4.9070 (8.37 ) − | 4.5038 (6.67 ) = | 4.4512 (5.34 ) = | 6.9768 (1.89 ) − | 4.3344 (5.92 ) |
| CMMOP6 | 1.3091 (5.72 ) = | 1.6635 (5.29 ) − | 2.2968 (9.26 ) − | 1.2814 (5.12 ) = | 1.3629 (5.52 ) = | 1.2437 (4.35 ) |
| CMMOP7 | 7.1475 (2.82 ) − | 7.1602 (2.60 ) − | 7.1252 (2.23 ) − | 7.1135 (2.69 ) − | 7.5489 (3.86 ) − | 6.9087 (2.97 ) |
| CMMOP8 | 1.4449 (5.24 ) − | 1.4498 (5.50 ) − | 1.4393 (5.55 ) − | 1.4259 (6.37 ) = | 1.4082 (5.59 ) = | 1.4035 (5.61 ) |
| CMMOP9 | 3.8051 (1.06 ) − | 3.8519 (1.08 ) − | 3.7925 (8.61 ) − | 3.8177 (1.09 ) − | 3.9216 (1.00 ) − | 3.6851 (8.59 ) |
| CMMOP10 | 3.0856 (1.91 ) = | 3.0901 (1.17 ) = | 2.9747 (1.06 ) = | 2.9752 (1.24 ) = | 3.2940 (1.75 ) − | 3.0142 (1.50 ) |
| CMMOP11 | 6.1527 (1.70 ) = | 6.3946 (1.71 ) − | 6.8483 (1.97 ) − | 6.1282 (1.72 ) = | 6.9445 (2.11 ) − | 6.1192 (1.62 ) |
| CMMOP12 | 6.7884 (6.79 ) − | 6.5079 (7.65 ) − | 6.8100 (9.25 ) − | 6.6301 (9.84 ) = | 9.0540 (1.73 ) − | 6.0199 (5.72 ) |
| CMMOP13 | 4.2168 (8.31 ) = | 4.3815 (1.17 ) − | 4.4049 (6.82 ) − | 4.1934 (1.06 ) = | 4.5647 (1.58 ) − | 4.1632 (1.06 ) |
| CMMOP14 | 4.3114 (9.26 ) − | 4.4529 (8.15 ) − | 4.5706 (1.25 ) − | 4.6162 (8.68 ) − | 4.6794 (1.37 ) − | 4.1993 (8.78 ) |
| +/−/= | 0/16/15 | 1/14/16 | 0/15/16 | 0/11/20 | 2/16/13 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, D.; Liu, J. A Novel Genetic Algorithm for Constrained Multimodal Multi-Objective Optimization Problems. Mathematics 2025, 13, 1851. https://doi.org/10.3390/math13111851
Feng D, Liu J. A Novel Genetic Algorithm for Constrained Multimodal Multi-Objective Optimization Problems. Mathematics. 2025; 13(11):1851. https://doi.org/10.3390/math13111851
Chicago/Turabian StyleFeng, Da, and Jianchang Liu. 2025. "A Novel Genetic Algorithm for Constrained Multimodal Multi-Objective Optimization Problems" Mathematics 13, no. 11: 1851. https://doi.org/10.3390/math13111851
APA StyleFeng, D., & Liu, J. (2025). A Novel Genetic Algorithm for Constrained Multimodal Multi-Objective Optimization Problems. Mathematics, 13(11), 1851. https://doi.org/10.3390/math13111851