
Convex Formulations for Antenna Array Pattern Optimization Through Linear, Quadratic, and Second-Order Cone Programming


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
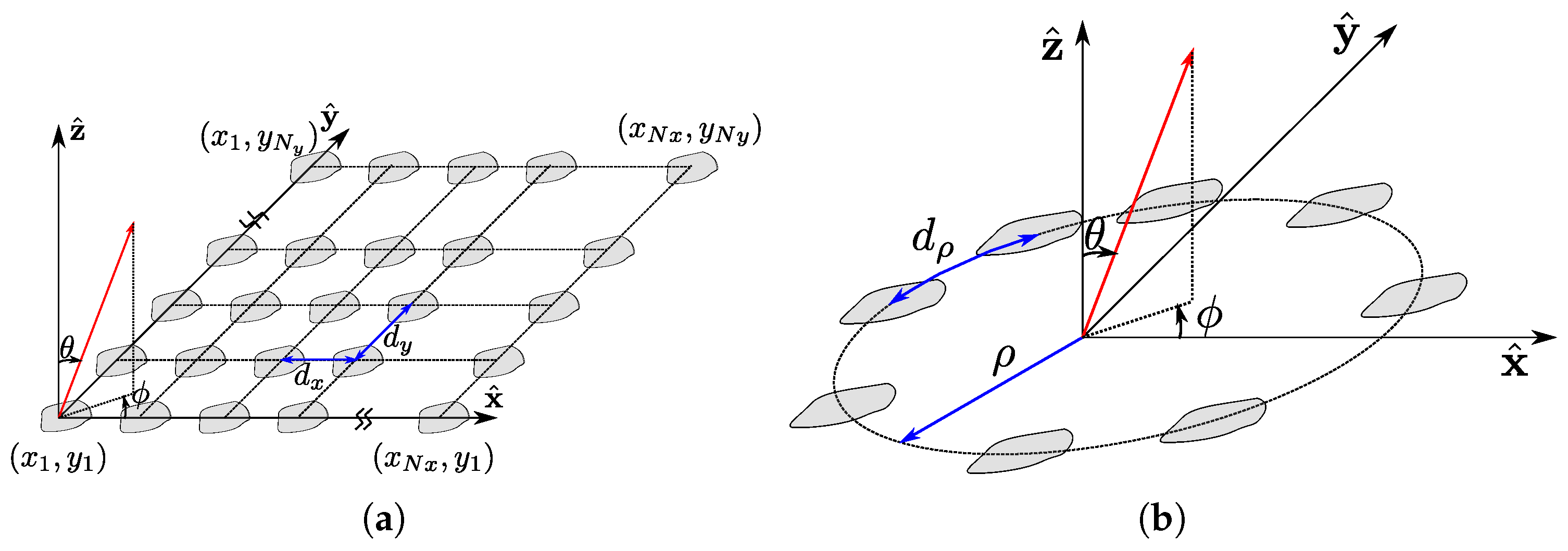
2. Formulation of an Array Pattern Through Hermitian Matrices
2.1. Directivity of an Array Antenna
2.2. Radiation Performance Using Hermitian Forms
2.3. Additional Constraints: Null and Sidelobe Level Control
3. Quadratic Programming
3.1. QP Formulation for Antenna Array Convex Optimization
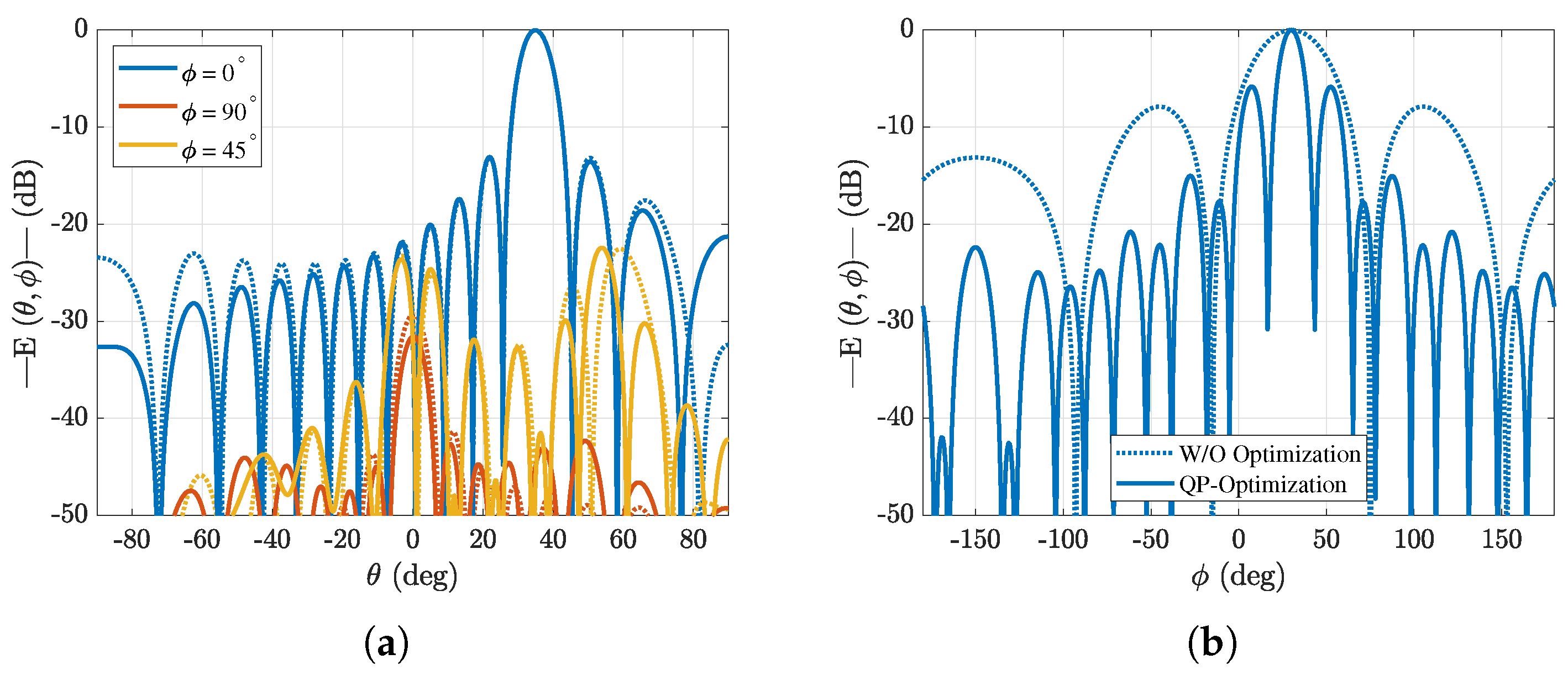
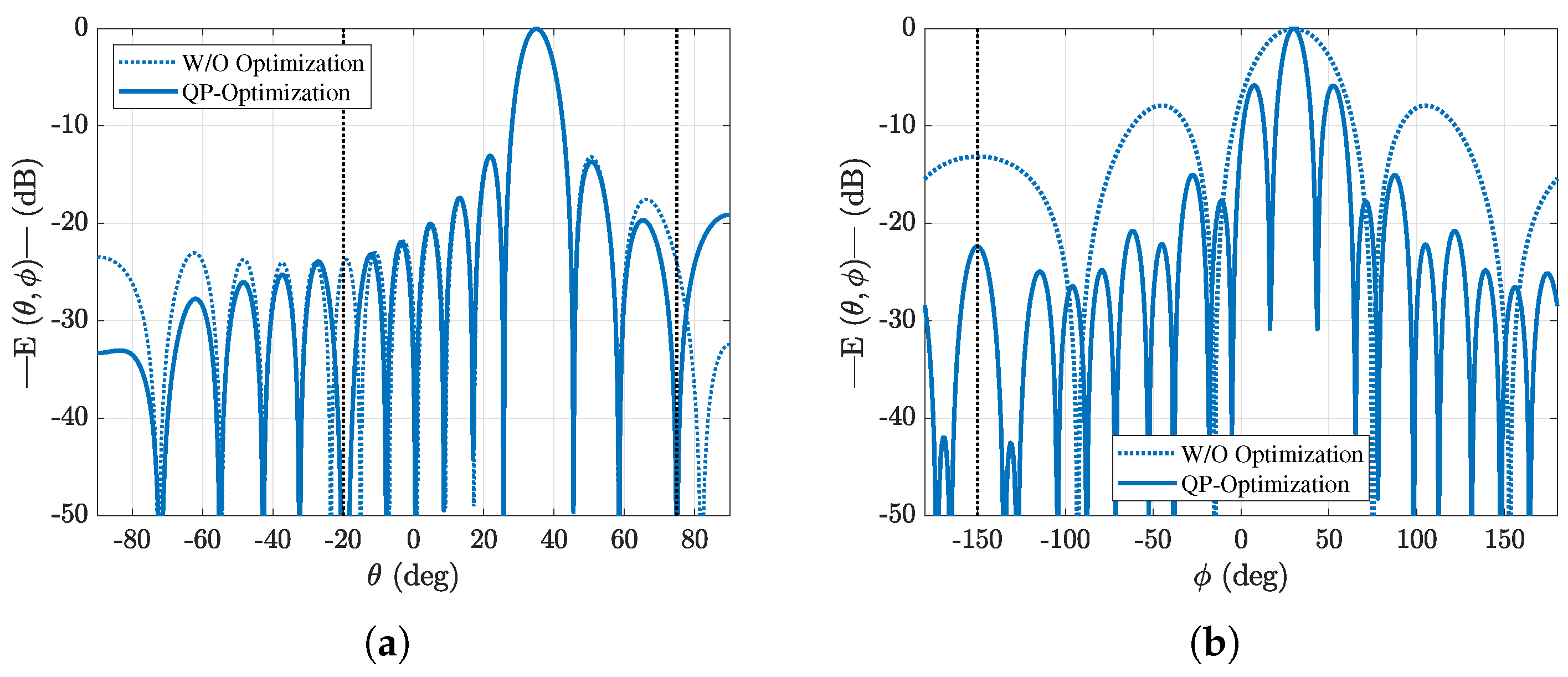
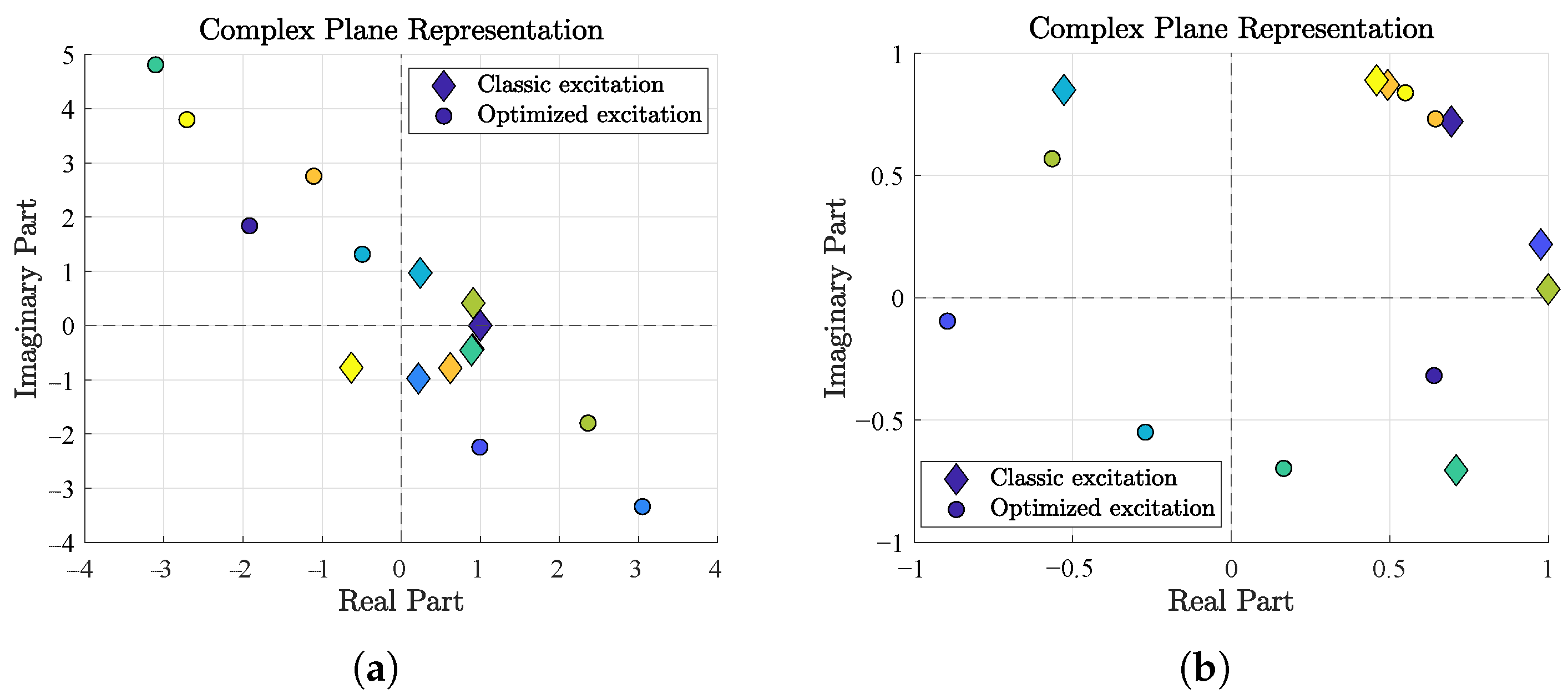
3.2. Results for Optimal Directivity with Null Requirements
4. Second-Order Cone Programming
4.1. SOCP Formulation for Antenna Array Optimization
4.2. Results for Optimal Directivity with Different Degrees of Constraints
5. LP Formulation for SLL Minimization
Results for Reducing SLLs Through LP
6. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| GA | Genetic algorithm |
| LP | Linear programming |
| PSO | Particle swarm optimization |
| QP | Quadratic programming |
| SLL | Sidelobe levels |
| SOCP | Second-order cone programming |
Appendix A
Appendix B
References
- Larsson, E.G.; Edfors, O.; Tufvesson, F.; Marzetta, T.L. Massive MIMO for next generation wireless systems. IEEE Commun. Mag. 2014, 52, 186–195. [Google Scholar] [CrossRef]
- Liu, F.; Cui, Y.; Masouros, C.; Xu, J.; Han, T.X.; Eldar, Y.C.; Buzzi, S. Integrated sensing and communications: Toward dual-functional wireless networks for 6G and beyond. IEEE J. Sel. Areas Commun. 2022, 40, 1728–1767. [Google Scholar] [CrossRef]
- Hasch, J.; Topak, E.; Schnabel, R.; Zwick, T.; Weigel, R.; Waldschmidt, C. Millimeter-wave technology for automotive radar sensors in the 77 GHz frequency band. IEEE Trans. Microw. Theory Techn. 2012, 60, 845–860. [Google Scholar] [CrossRef]
- Uzkov, A.I. An approach to the problem of optimum directive antenna design. C.R. Acad. Sci. USSR 1946, 53, 35–38. [Google Scholar]
- Bloch, R.G.M.A.; Pool, S.D. A new approach to the design of superdirective aerial arrays. Proc. Inst. Electr. Eng. 1953, 100, 303–314. [Google Scholar]
- Uzsoky, M.; Solymar, L. Theory of superdirective linear arrays. Acta Phys. 1956, 6, 185–204. [Google Scholar] [CrossRef]
- Lo, S.W.L.Y.T.; Lee, Q.H. Optimization of directivity and signal-to-noise ratio of an arbitrary antenna array. Proc. IEEE 1966, 54, 1033–1045. [Google Scholar] [CrossRef]
- Krupitskii, E.I. On the maximum directivity of antennas consisting of discrete radiators. Sov. Phys. Dokl. 1962, 7, 257–259. [Google Scholar]
- Tai, C.T. The optimum directivity of uniformly spaced broadside arrays of dipoles. IEEE Trans. Antennas Propag. 1964, 12, 447–454. [Google Scholar] [CrossRef]
- Cheng, D.K.; Tseng, F.I. Maximisation of directive gain for circular and elliptical arrays. Proc. IEEE 1967, 114, 589–594. [Google Scholar] [CrossRef]
- Cheng, D.K.; Tseng, F.I. Gain optimization for arbitrary antenna arrays. IEEE Trans. Antennas Propag. 1967, 13, 973–974. [Google Scholar] [CrossRef]
- Bhattacharyya, A.K. Phased Array Antennas: Floquet Analysis, Synthesis, BFNs, and Active Array Systems; Wiley-Interscience: Hoboken, NJ, USA, 2006. [Google Scholar]
- Cheng, D.K. Optimization techniques for antenna arrays. Proc. IEEE 1971, 59, 1664–1674. [Google Scholar] [CrossRef]
- Einarsson, O. Optimization of planar arrays. IEEE Trans. Antennas Propag. 1979, 27, 86–92. [Google Scholar] [CrossRef]
- Tseng, F.I.; Cheng, D.K. Optimum scannable planar arrays with an invariant sidelobe level. Proc. IEEE 1968, 56, 1771–1778. [Google Scholar] [CrossRef]
- Ares-Pena, F.J.; Rodriguez-Gonzalez, J.A.; Villanueva-Lopez, E.; Rengarajan, S.R. Genetic algorithms in the design and optimization of antenna array patterns. IEEE Trans. Antennas Propag. 1999, 47, 506–510. [Google Scholar] [CrossRef]
- Donelli, M.; Martini, A.; Massa, A. A hybrid approach based on PSO and Hadamard difference sets for the synthesis of square thinned arrays. IEEE Trans. Antennas Propag. 2009, 57, 2491–2495. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Zhao, W.; Zhu, T. Application of Dandelion Optimization Algorithm in Pattern Synthesis of Linear Antenna Arrays. Mathematics 2024, 12, 1111. [Google Scholar] [CrossRef]
- Bulatsyk, O.; Katsenelenbaum, B.; Topolyuk, Y.; Voitovich, N. Phase Optimization Problems: Applications in Wave Field Theory; Wiley-VCH: Weinheim, Germany, 2010. [Google Scholar]
- Andriychuk, M. Antenna Synthesis Through the Characteristics of Desired Amplitude; Cambridge Scholars Publishing: Newcastle upon Tyne, UK, 2019. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Ng, B.P.; Er, M.H.; Kot, C. A flexible array synthesis method using quadratic programming. IEEE Trans. Antennas Propag. 1993, 41, 1541–1550. [Google Scholar] [CrossRef]
- Lebret, H.; Boyd, S. Antenna array pattern synthesis via convex optimization. IEEE Trans. Signal Process. 1997, 45, 526–532. [Google Scholar] [CrossRef]
- Corcoles, J.; Gonzalez, M.A.; Rubio, J. Multiobjective optimization of real and coupled antenna array excitations via primal-dual, interior point filter method from spherical mode expansions. IEEE Trans. Antennas Propag. 2009, 57, 110–121. [Google Scholar] [CrossRef]
- Holm, S.; Elgetun, B. Properties of the beampattern of weight- and layout-optimized sparse arrays. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1997, 44, 983–991. [Google Scholar] [CrossRef]
- Corcoles, J.; Gonzalez, M.A.; Zapata, J. Linear programming from generalised scattering matrix analysis of array for minimum sidelobe level and prescribed nulls. Electron. Lett. 2009, 45, 9–10. [Google Scholar] [CrossRef]
- Kurth, R.R. Optimization of array performance subject to multiple power constraints. IEEE Trans. Antennas Propag. 1974, 22, 103–105. [Google Scholar] [CrossRef]
- Hirasawa, K. The application of a biquadratic programming method to phase-only optimization of antenna arrays. IEEE Trans. Antennas Propag. 1988, 36, 1545–1550. [Google Scholar] [CrossRef]
- Lobo, M.S.; Vandenberghe, L.; Boyd, S.; Lebret, H. Applications of second-order cone programming. Linear Algebra Appl. 1998, 284, 193–228. [Google Scholar] [CrossRef]
- Corcoles, J.; Gonzalez, M.A.; Rubio, J. Mutual coupling compensation in arrays using a spherical wave expansion of the radiated field. IEEE Antennas Wirel. Propag. Lett. 2009, 8, 108–111. [Google Scholar] [CrossRef]
- Corcoles, J.; Zastrow, E.; Kuster, N. Convex optimization of MRI exposure for mitigation of RF-heating from active medical implants. Phys. Med. Biol. 2015, 60, 7293–7308. [Google Scholar] [CrossRef]
- Gantmacher, F.R. The Theory of Matrices, Volume One; Chelsea Publishing Company: New York, NY, USA, 1959. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vaquero, Á.F.; Córcoles, J. Convex Formulations for Antenna Array Pattern Optimization Through Linear, Quadratic, and Second-Order Cone Programming. Mathematics 2025, 13, 1796. https://doi.org/10.3390/math13111796
Vaquero ÁF, Córcoles J. Convex Formulations for Antenna Array Pattern Optimization Through Linear, Quadratic, and Second-Order Cone Programming. Mathematics. 2025; 13(11):1796. https://doi.org/10.3390/math13111796
Chicago/Turabian StyleVaquero, Álvaro F., and Juan Córcoles. 2025. "Convex Formulations for Antenna Array Pattern Optimization Through Linear, Quadratic, and Second-Order Cone Programming" Mathematics 13, no. 11: 1796. https://doi.org/10.3390/math13111796
APA StyleVaquero, Á. F., & Córcoles, J. (2025). Convex Formulations for Antenna Array Pattern Optimization Through Linear, Quadratic, and Second-Order Cone Programming. Mathematics, 13(11), 1796. https://doi.org/10.3390/math13111796