1. Introduction
State estimation plays a fundamental role in the control and monitoring of dynamic systems, with specific reference to nonlinear behaviors and disturbances. Classical linear models are not always able to properly describe the complexity of actual systems, and for this reason, more sophisticated approaches, e.g., Takagi–Sugeno (T-S) fuzzy models, have been exploited. They are able to model nonlinear systems through interpolating a set of linear sub-models via fuzzy membership functions, thus making it possible to apply linear system analysis techniques to nonlinear cases [
1]. Owing to their versatility and effectiveness, the models have found extensive applications in many fields, including control system design, fault diagnosis, and intelligent systems [
2].
In spite of their benefits, state estimation in such models is still a daunting task, particularly in the presence of unmeasured disturbances and unobservable premise variables (UPVs). This is especially true in fields of application such as robotics, power systems, and biomedical engineering, where system uncertainties and measurement imprecisions can greatly affect performance [
3]. One of the primary approaches to tackle this difficulty is the development of robust observers specifically for fuzzy systems. Chadli and Karimi [
4] proposed a robust unknown input observer for Takagi–Sugeno models, providing LMI-based conditions to ensure stable estimation despite unknown disturbances affecting states and outputs.
In a related work, ref. [
5] investigated the design of finite-time bounded tracking controllers designed for fractional-order systems subject to state delays using output feedback for reducing the effects of temporal delays and the dynamics of the systems. However, their method revolves more around control design rather than our proposed algorithm, the FO-PIUIO, where the estimation of both the state and unmeasured inputs is given the first priority. As opposed to the method that Wu et al. utilized where the problem of UPVs was not directly addressed, the FO-PIUIO is specifically designed to handle this problem in the context of fractional-order dynamics as well as UPVs. Combining fractional-order dynamics and robust estimation methods gives the FO-PIUIO a more integrated solution for state estimation and disturbance elimination.
The FO-PIUIO introduced here successfully addresses a key theoretical gap by extending the application of integer-order UIOs and fuzzy observers to fractional-order dynamic systems. In comparison with integer-order approaches that routinely struggle with the treatment of memory effects and long-term dependences of dynamic systems, our proposed fractional-order method incorporates such intricacies for a higher level of accuracy and robustness of state and unknown input estimations.
Existing literature, such as the nonlinear unknown input observer (NUIO) cited by [
6], has provided effective fault-tolerant methods for integer-order electro-hydraulic systems. However, this method assumes fully measurable nonlinearities and does not account for fractional-order dynamics as well as hidden state-dependent interactions. Such limitations make it less applicable to those systems that display memory effects and hereditary traits or unobservable premise variables—phenomena common in modern industrial and biological applications.
The unknown input observer (UIO) design principles were established by using system redundancy along with filtering concepts, enhancing state estimation in nonlinear control systems [
7]. These observers have found extensive application in fields such as industrial automation, safety-critical systems, and fault-tolerant control, where robustness to model uncertainty is of the utmost importance.
One of the most significant features of the Takagi–Sugeno fuzzy modeling framework is that it is based on premise variables that dictate the firing of fuzzy rules. Two types of premise variables exist: measurable premise variables (MPVs) and unmeasurable premise variables (UPVs). MPVs are premise variables that are directly measurable or calculable from the outputs of the system. MPV-based FO-TS systems have observers that are able to utilize the data available to enhance the precision of state estimation. UPVs, however, utilize internal system states, which are not readily measurable, and observer design becomes challenging with the need for further estimation methods to reconstruct both the system state and premise variables.
The MPV-UPV distinction is critical in observer design for state estimation. MPV systems allow for the systematic design of observers with the benefit of known premise dynamics. In UPV systems, however, state estimation entails the necessity for additional augmentation strategies to treat uncertainties. The state augmentation approach formulated in this paper presents a unified framework to treat MPV and UPV cases with unknown inputs and disturbances robustness.
One of the noteworthy advancements in the field of T-S modeling is the application of fractional-order dynamics, which enable the inclusion of memory and hereditary influences by using fractional derivatives [
8]. It has enhanced the modeling precision of dynamic systems in various fields, such as electromechanical systems, bioengineering, and industrial processes [
9]. Fractional-order fuzzy models are more capable of describing real-world behaviors than integer-order models, especially for systems with long-range dependencies [
10]. But state estimation in these models is more complex, especially in the case of unmeasurable premise variables, where it is required to design sophisticated observers that are able to reconstruct system states and unknown inputs.
Unlike traditional integer-order UIO designs, the FO-PIUIO benefits from the utilization of fractional-order dynamics within the system to enable improved modelling of long-range-dependent systems. In addition, as opposed to fuzzy observer methods that traditionally assume the availability of measurable premise variables (MPVs), our method can perform under the conditions of unmeasurable premise variables (UPVs). With this ability comes the capacity for precise state and unknown input estimations under more complex and uncertain conditions. Therefore, the FO-PIUIO becomes particularly beneficial under conditions involving uncertainties and disturbances.
A significant advancement in this area has been the establishment of fractional-order unknown input observers for application in nonlinear systems based on fractional-order fuzzy models that are subject to unmeasurable premise variables (UPVs) [
11]. These observers allow for robust state estimation and fault detection without the need to alter the original model of the system, thereby rendering them extremely desirable for practical implementation. Stability and convergence analyses of these observers are generally carried out by Lyapunov-based approaches, in which the conditions are expressed in terms of linear matrix inequalities to facilitate easy implementation of robust observer and controller designs [
12]. The use of optimization methods based on linear matrix inequalities is common in control theory due to their ability to guarantee reliable performance under system uncertainties and external disturbances [
13]. The performance of fractional-order unknown input observers has been validated in a wide range of applications, ranging from robotics to power electronics, and fault detection systems [
14].
Recent advances have also explored further the application of machine learning-based approaches in state estimation accuracy improvement. The construction of a hybrid observer through the combination of data-driven approaches and classical observer designs has been reported to improve adaptive estimation in varying conditions and improve real-time performance [
15]. In parallel, advances in observer-based fault diagnosis have also been prominent, particularly in sensor fault detection and isolation. Observer-based fault detection methods using structured residuals have been designed with the aim of sensor fault detection and isolation with enhanced robustness compared to the standard fault detection methods, rendering them apt for application in real-time industrial environments [
16].
Other developments in fault diagnosis include the development of sensor fault detection techniques based on multiple observer schemes, which are designed with a view to nullify unknown inputs while maintaining the integrity of fault isolation [
17]. Such multiple observer systems have been widely used in safety-critical applications like aerospace systems and industrial process control, where accurate fault isolation is crucial in maintaining operational integrity. Model-based fault diagnosis methods have been emphasized as the most important strategy for enhancing the reliability of systems operating under stochastic environments [
18]. The application of fractional-order dynamics in observers for fault diagnosis has achieved an immense advancement and thus reemphasized the relevance of high-order observer technologies in contemporary control systems [
19].
A recent paper has illustrated a fractional-order fuzzy observer designed for a fuzzy model with immeasurable premise variables, enhancing the accuracy of estimation in systems subject to severe uncertainty. The paper presents a novel observer structure, proving its efficiency in fault detection scenarios and enhancing the robustness of fractional-order observer methods [
20]. Beyond these advances, ongoing work on the unspecified input observers of nonlinear systems has investigated their capability to achieve more precise state estimation and unknown inputs. Such questions continue to introduce resilience and enhance the usefulness of observer design in sophisticated control systems [
21].
While existing methods of unknown input observers (UIOs) and fuzzy observer designs for fractional-order systems primarily deal with measurable premise variables (MPVs), the field of research on observers of fractional-order Takagi–Sugeno (FO-TS) systems with respect to unmeasurable premise variables (UPVs) is less explored. Further, existing methods do not provide a complete coverage of state augmentation for better state and unknown input estimation in these systems. This paper attempts to fill this gap by designing a new fractional-order proportional-integral unknown input observer (FO-PIUIO) for FO-TS systems with UPVs via partial state augmentation for improved estimation quality and robustness against unmeasurable premise variables and unknown inputs.
This paper proposes a novel fractional-order proportional-integral unknown input observer (FO-PIUIO) design for fractional-order Takagi–Sugeno systems with MPVs and UPVs to enhance the estimation accuracy and robustness of the state and to address the problems raised by unmeasurable premise variables and unknown inputs. Among the contributions of this paper is the importance of state augmentation, which is an inherent component of improved estimation quality. By adding the unknown inputs to the system model, state augmentation allows for a closer approximation of the system dynamics free from estimation bias and, therefore, ensures consistent observer behavior.
The approach to be suggested employs linear matrix inequalities (LMIs) in the design of stability conditions and the optimization of observer gains to ensure the asymptotic convergence of state estimation errors. The main contributions of this paper include the development of a novel fractional-order unknown input observer through state augmentation for more precise estimation; stability condition derivation through Lyapunov-based analysis and LMI optimization for the asymptotic convergence of the estimation errors; the generalization of this method to MPV-based and UPV-based FO-TS models, which solves an open problem in observer-based control; and comprehensive numerical verification, which demonstrates the potential of the proposed observer in handling unknown inputs, removing estimation bias, and improving robustness in dynamic systems.
The organization of the rest of this paper is as follows. First, the problem statement and system model are presented, followed by the suggested observer design and stability condition derivation. Numerical simulations are provided to validate the effectiveness of the suggested method. The conclusion and potential future research directions are presented in the last section.
4. Results and Discussion
4.1. Example: Design of a Fractional-Order PI Observer with Unknown Inputs
To demonstrate the capability of the fractional-order PI observer with unknown inputs in state estimation for a system represented by a FO-TS model, we considered the following example:
The activation functions are as follows:
Figure 1 shows a close overlap between the actual system states and their estimates obtained using the FO-PIUIO observer, indicating high estimation accuracy. This consistency confirms the effectiveness of the observer in reconstructing the system states, even in the presence of unknown inputs and disturbances. These results validate the stability conditions established through the Lyapunov method, as well as the formulation based on linear matrix inequalities (LMI), ensuring the asymptotic convergence of the estimation errors.
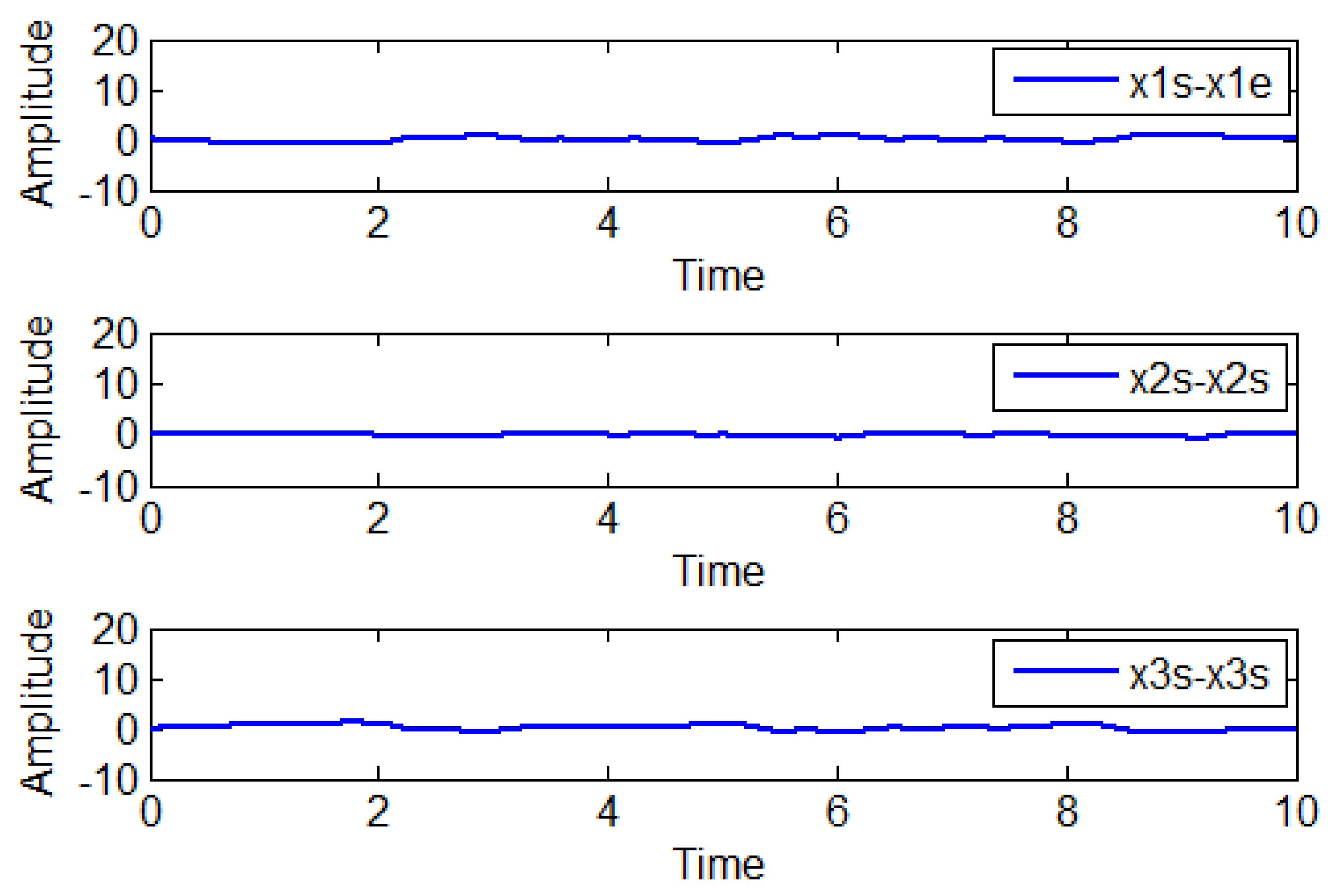
Figure 2 illustrates the estimation error dynamics of the observer designed in the paper, specifically the Fractional-Order Proportional-Integral Unknown Input Observer (FO-PIUIO). These error signals measure the difference between the estimated states and the actual system states over time.
Figure 3 shows the precision of the FO-PIUIO in the estimation of unknown inputs because real inputs (solid blue lines) and their estimates (red dashed lines) are seen to stay very close to each other along the time horizon. The resemblance shows the capability of the observer for the proper reconstruction of unknown disturbances in the system.
The benefit of the FO-PIUIO in estimating unknown inputs is its minimum deviation from actual values even in the presence of model uncertainty. The fact that the estimated unknown inputs rapidly converge to their actual values also indicates that the state augmentation method is effective in incorporating unknown inputs into the estimation. As an additional check, another subplot of error in unknown input estimation versus time can complement the visualization of observer performance.
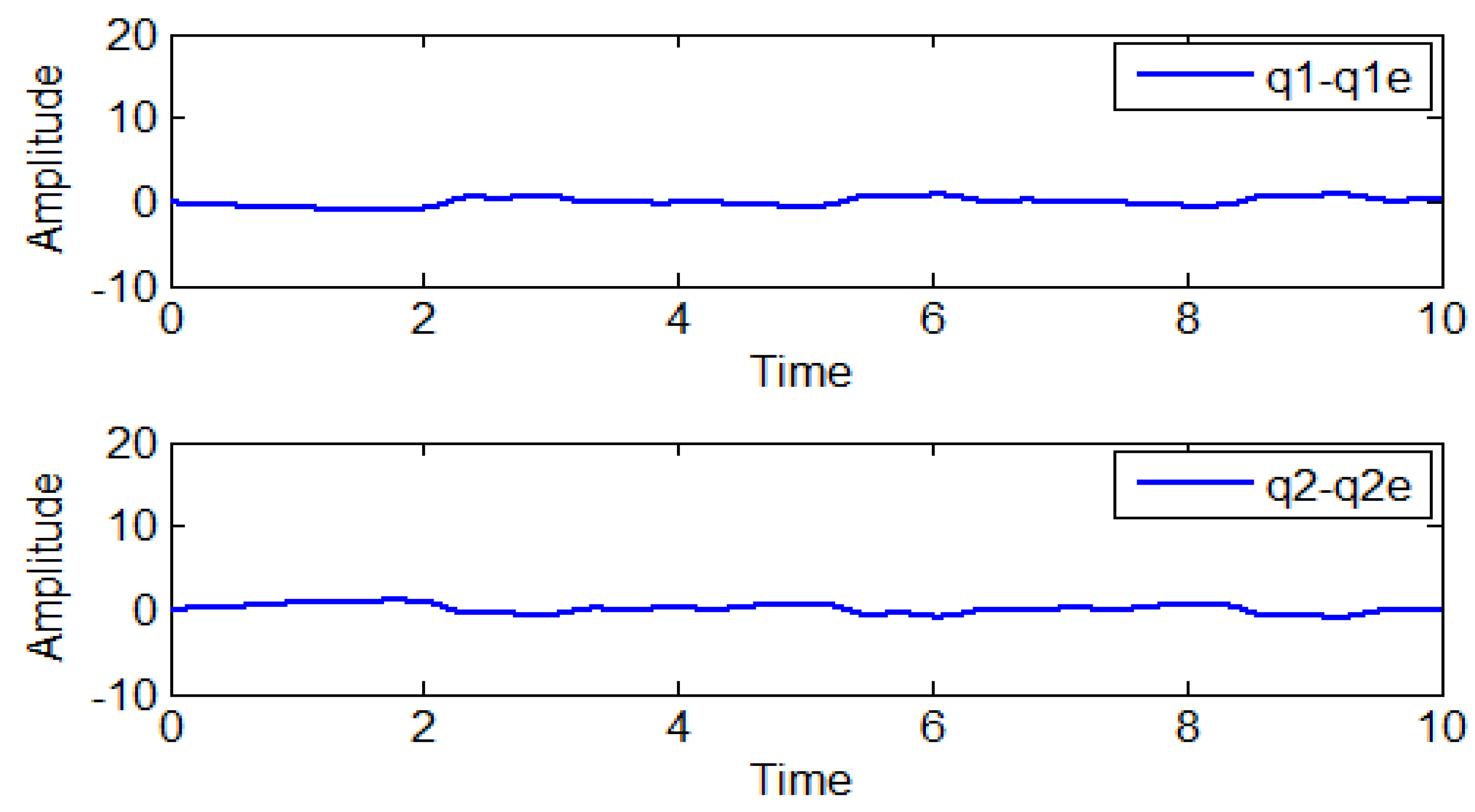
Figure 4 shows error dynamics for estimating unknown input. Plots demonstrate that unknown input estimation errors have transient behavior initially before converging to close to zero values, confirming the stability and accuracy of the observer. The fast-decreasing nature of the errors demonstrates the strong capability of the observer in rejecting disturbances and being robust to system uncertainties.
Further, the smooth and closed form of the error trajectories shows that the observer exhibits good performance with fewer oscillations, which is necessary for real-time fault detection and control issues. These findings validate the LMI-based optimization used for the synthesis of observer gains so that the estimation process is well-conditioned. The inclusion of other statistical metrics such as the variance of estimation errors may further validate the effectiveness of the suggested approach.
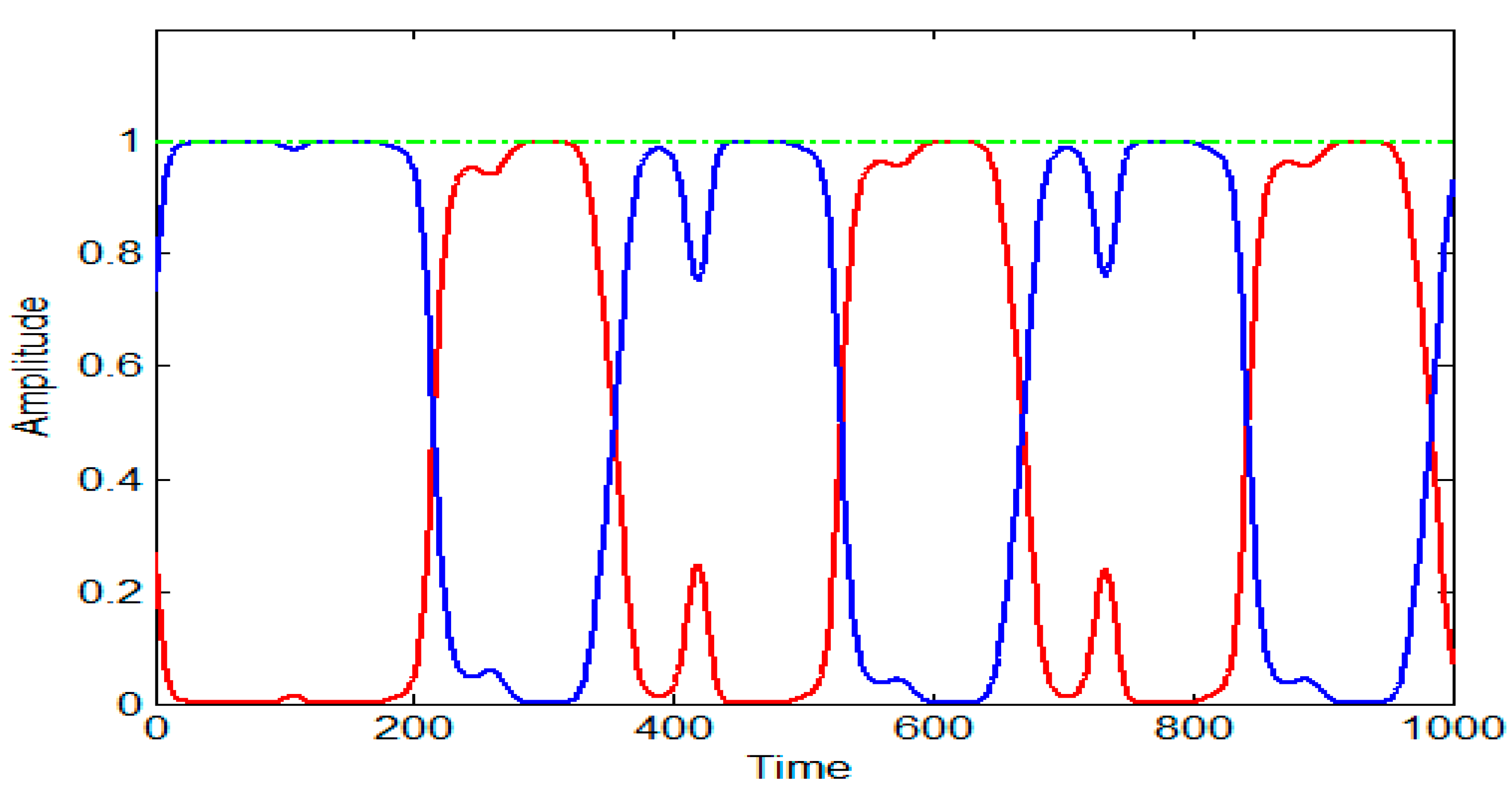
Figure 5 illustrates the evolution of the activation functions governing the switching mechanism among the fuzzy rules in the fractional-order Takagi–Sugeno (FO-TS) system. The activation functions—represented by the red, blue, and green lines—correspond respectively to the degrees of activation for fuzzy rules 1, 2, and 3. These functions determine the relative contribution of each local model in the global system behavior based on the current system state.
The observed oscillations between 0 and 1 for each activation function confirm adherence to the convexity property of fuzzy systems, ensuring that the sum of the membership values at any instant equals one. The alternating dominance of these activation levels indicates the system’s dynamic transition between operational modes in response to varying state conditions.
The simulation results clearly illustrate the better accuracy, stability, and robustness of the developed fractional-order proportional-integral unknown input observer (FO-PIUIO) in state estimation and unknown input estimation. The good agreement between the actual and estimated values, and the fast convergence of the estimation errors to near zero levels affirms the effectiveness of the state augmentation technique and LMI-based observer design. In addition, the bounded and smooth convergence of the estimation errors confirms the observer’s robustness against system uncertainties and unknown inputs. The results demonstrate the FO-PIUIO’s readiness for practical implementation in fault detection, resilient control, and dynamic system monitoring, as well as a supporting tool for safety-critical and adaptive control systems.
4.2. Discussion
The LMI conditions found in Theorems 1-2 were solved numerically using MATLAB R2014a in combination with the YALMIP interface and the SeDuMi_1_3 solvers. These tools were selected for their robustness and suitability for handling both standard and advanced linear matrix inequality (LMI) formulations. In particular, MATLAB was used for model implementation and data handling, while YALMIP and SeDuMi were employed to solve the LMI problems derived from Lyapunov-based stability analysis, including those involving Schur complement transformations and convexity-based constraints. This combination is well-suited for systems of small to moderate size (n ≤ 50 states). For larger-scale problems, further optimization strategies such as sparse matrix handling or decomposition methods may be required to ensure computational efficiency. These tools were sufficient to generate all simulations and results presented in this study.
Notwithstanding the fact that the numerical example considered in this paper predominantly deals with constant unknown inputs, the FO-PIUIO technique in principle might be adapted to accommodate time-varying unknown inputs. This becomes increasingly difficult, particularly in the field of the stability of the observer, since the error dynamics would have to be reassessed in real-time to accommodate variations of the unknown inputs. In the work that follows, we will introduce a variation of the observer to account for the nonlinear unknown inputs, especially if the higher-order derivatives of unknown inputs are not zero. This will ensure the observer remains stable and robust when the unknown inputs exhibit distinct nonlinear features. We will derive new conditions for stability to ensure the performance of the observer in such complicated scenarios.
While the method is now designed for handling relatively constant unknown inputs, the generalization to more involved and nonlinear ones remains a very significant area for future research. We are currently adapting the observer to be capable of handling these more complex scenarios with the view of handling nonlinear dynamics and ensuring stability and convergence under such scenarios.
In the example given numerically, constant unknown inputs were used for the simplification of analysis and presentation of the results. Yet this was done purely for didactic reasons, and our approach is not restricted to constant unknown inputs. It can be generalized to handle time-varying unknown inputs, although this raises further challenges, especially in proving the stability and convergence of the observer in situations of uncertainty.
We have generalized the analysis to cope with the observer’s robustness in situations where unknown inputs are time-varying and model parameters are uncertain. While the numerical example has been reduced using constant unknown inputs, we show that the FO-PIUIO method is not limited to this situation. Extensions to the method are feasible and can be generalized to more complex situations, including the handling of time-varying unknown inputs and parameter uncertainties within the model. These would involve additional stability and error dynamic considerations, so the observer remains effective across various situations.
Although the numerical example depicts the phenomenon of the FO-PIUIO method for a low-order system (order 3), it should be pointed out that it is possible to extend the method to higher-order systems, typical for real-world scenarios. However, as the dimension of the system increases, so does the computational complexity when solving the LMIs. The main challenge here is handling more complex error dynamics and solving bigger optimization systems. But the method remains viable for systems of greater dimensions, provided LMI optimization is well managed.
LMI-based synthesis provides a strong analysis for the stability and convergence of the observer. With increased system dimensions, however, the cost of LMI optimization may grow rapidly. This results in computational overhead, slowing down the process. Efficient solvers may be employed to minimize the overhead, such as SDP-based or rank-reduction-based solvers. Such an approach minimizes resource utilization without compromising the observer’s performance.
Although the numerical simulations presented in this work validate the theoretical performance of the designed observers, we know that experimental examples are essential to demonstrate the superiority of the controller when implemented in real-world scenarios. The experimental validation of the designed observer for real-world nonlinear systems, including the difficulties brought about by system noise, sensor noise, and real-time implantation constraints, will be the focus of our future work.
Future work will involve applying the proposed observer to various types of systems, such as power electronics, mechanical actuators, biomedical devices, and cyber-physical platforms. Each system imposes its own limitations, such as noise, sensor precision, actuator limitations, and real-time operation demands. For example, in power electronics, the observer will be tested under conditions of electrical noise, varying load conditions, and non-idealities in switching devices. Mechanical actuators, actuator delays, sensor drift, and friction losses will be considered. Similarly, in biomedical devices, noisy sensor measurements, limited processing, and real-time requirements will be addressed.
The implementation of the proposed observer in these systems will also entail the consideration of several practical constraints, such as sensor noise, processing limitations, and actuator delays. For instance, in cyber-physical systems, real-time communication and processing are critical, and the observer will be optimized for low-latency processing. Additionally, the observer will be formulated to cater to the specific precision requirements of each system while maintaining fault detection accuracy and state estimation reliability.
In these real applications, each system’s specificity, precision demands, and physical constraints will be taken into account responsibly. This will ensure that the proposed observer does well under various environments, managing such factors as measurement noise, sensor constraints, and processing resources. By specializing the observer in these conditions, we aspire to demonstrate its real-world superiority and robustness in real applications.
5. Conclusions
This work introduces a novel fractional-order proportional-integral unknown input observer (FO-PIUIO) design based on state augmentation for fractional-order Takagi–Sugeno (FO-TS) systems. The developed strategy offers a high accuracy of state estimation and successfully addresses the challenge posed by unknown inputs and unmeasurable premise variables (UPVs). By adopting state augmentation, the proposed method embeds the unknown inputs in an augmented system model that allows for the unbiased estimation of states and adds robustness to the observer performance. Theoretical guarantees on stability were established through Lyapunov-based conditions and linear matrix inequality (LMI) optimization, proving the asymptotic convergence of the estimation errors.
By means of numerical simulations, the observer proposed in this research exhibited improved performance in coping with unknown inputs, reducing estimation bias, and improving robustness compared to conventional observers.
The results of this work validate the effectiveness of the FO-PIUIO framework in both measurable premise variable (MPV) and unmeasurable premise variable (UPV) cases, thus highlighting its potential use in applications like fault diagnosis, control systems, and safety-critical systems.
Despite the favorable outcomes with the proposed methodology, experiments would have to be conducted to determine how effective it would be in real systems. Future experiments should aim at performing experiments on applications in robot systems, power electronics, and bio-engineering. Secondly, the use of machine learning methods like neural networks or adaptive filters would also be able to make the observer even more dynamically condition-adaptive. The creation of the FO-PIUIO framework for real-time fault detection and isolation would greatly increase its applications in safety-related applications. Also, research on the FO-PIUIO framework coupled with distributed estimation would improve its performance in large-scale networked control systems. Lastly, the reduction of the computational complexity of the LMI formulation would make this method feasible for use in real-time in complicated systems.
The suggested guidelines aim at extending the applicability, improving the stability, and optimizing the computational efficiency of the proposed observer, thus making it a more powerful tool for advanced state estimation and control of nonlinear dynamic systems.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}