
Advanced Vehicle Routing for Electric Fleets Using DPCGA: Addressing Charging and Traffic Constraints


Abstract
1. Introduction
1.1. Literature Review
1.2. Research Innovations
- Based on the existing VRPTW mathematical model in the literature, a VRP-TWTVS-CS planning model is established.
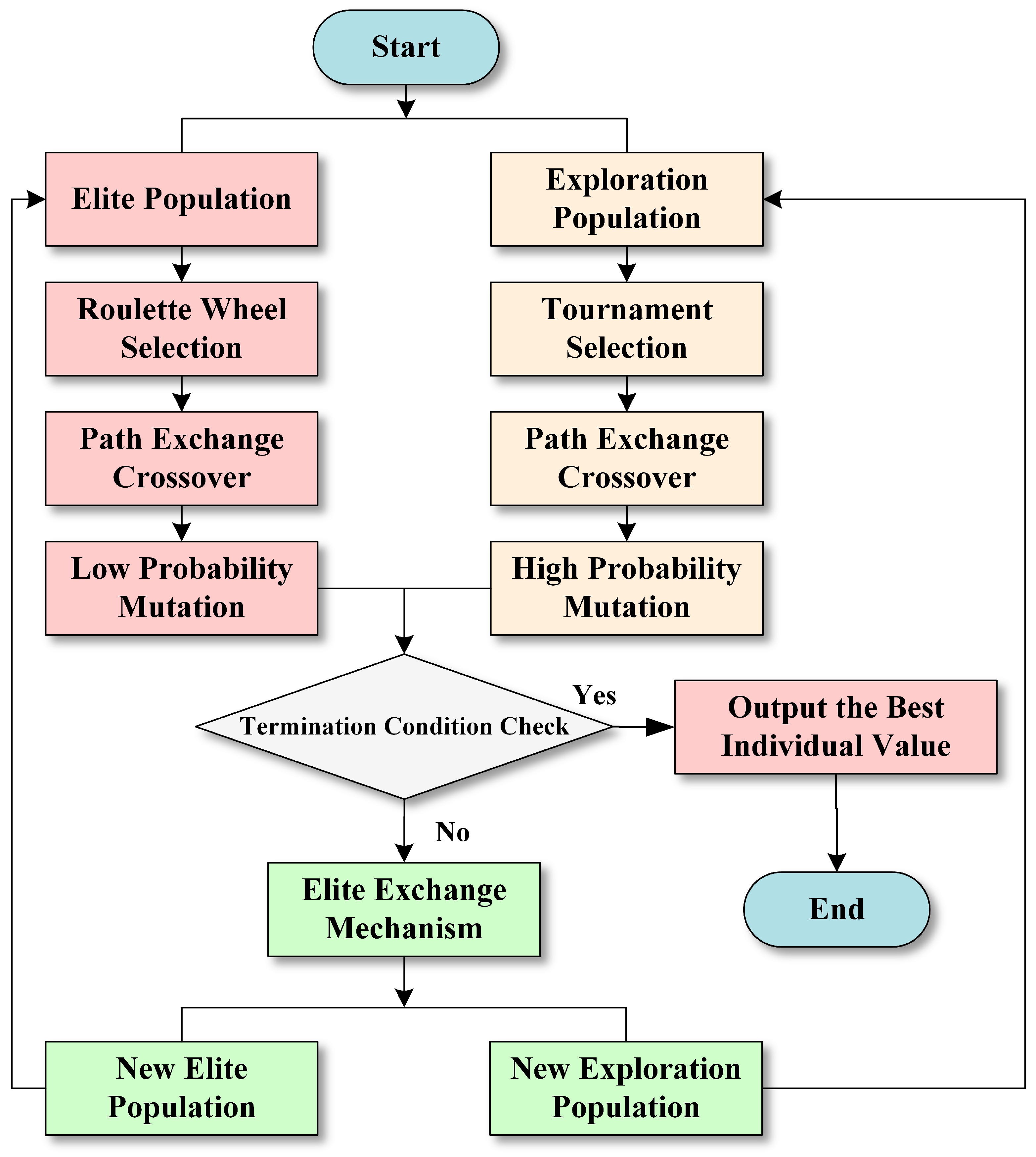
- An improved dual-population genetic algorithm is used, setting elite populations and exploratory populations, introducing a dual-population collaborative development mechanism, and using a roulette wheel selection population to assist the development of the tournament selection population, thereby improving the algorithm and optimizing the solution speed and strengthening the algorithm’s solving ability.
- The VRP-TWTVS-CS model used in this paper and the DPCGA algorithm ultimately improved customer satisfaction by 3% on average compared to the ESA-VRPO and AVNS algorithms in customer satisfaction evaluation, reduced convergence time by 15%, and found better solutions in complex scenarios. This indicates that in real-world environments, service quality and customer satisfaction can be effectively improved.
- The effectiveness of the proposed algorithm was validated through two experiments, one of which used a dataset from the existing literature, and the other was adapted from the Solomon dataset, covering three different scale scenarios with a total of 15 instances.
1.3. Article Composition
2. Model Formulation
2.1. VRP-TWTVS-CS Model
2.2. Model Assumptions
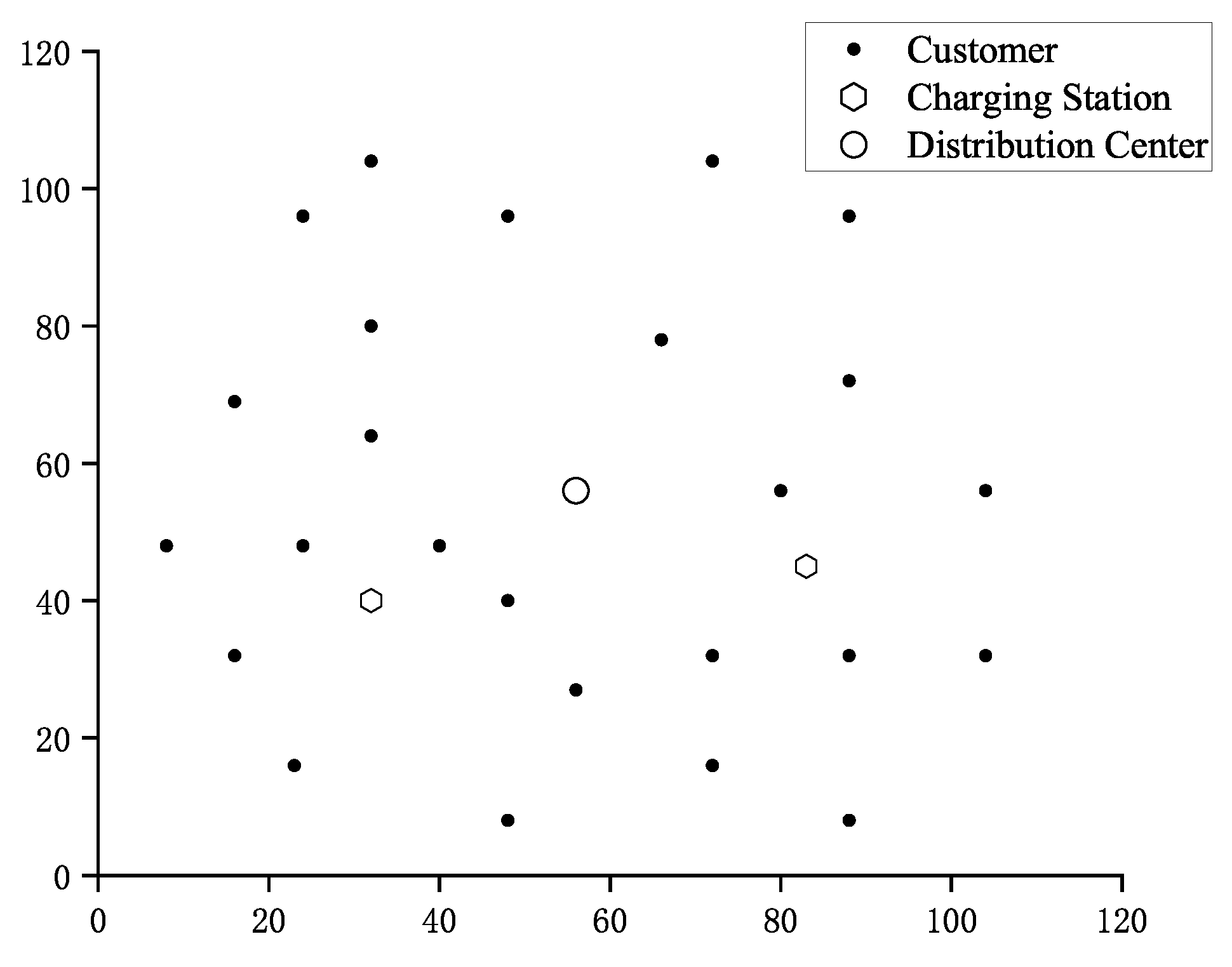
- There is only one distribution center, from which the vehicles depart and return after completing their distribution tasks.
- The distribution of goods is one-way, with no backhauling involved.
- Each distribution vehicle serves only one route.
- The demand and time window for each customer remain constant over time and are known.
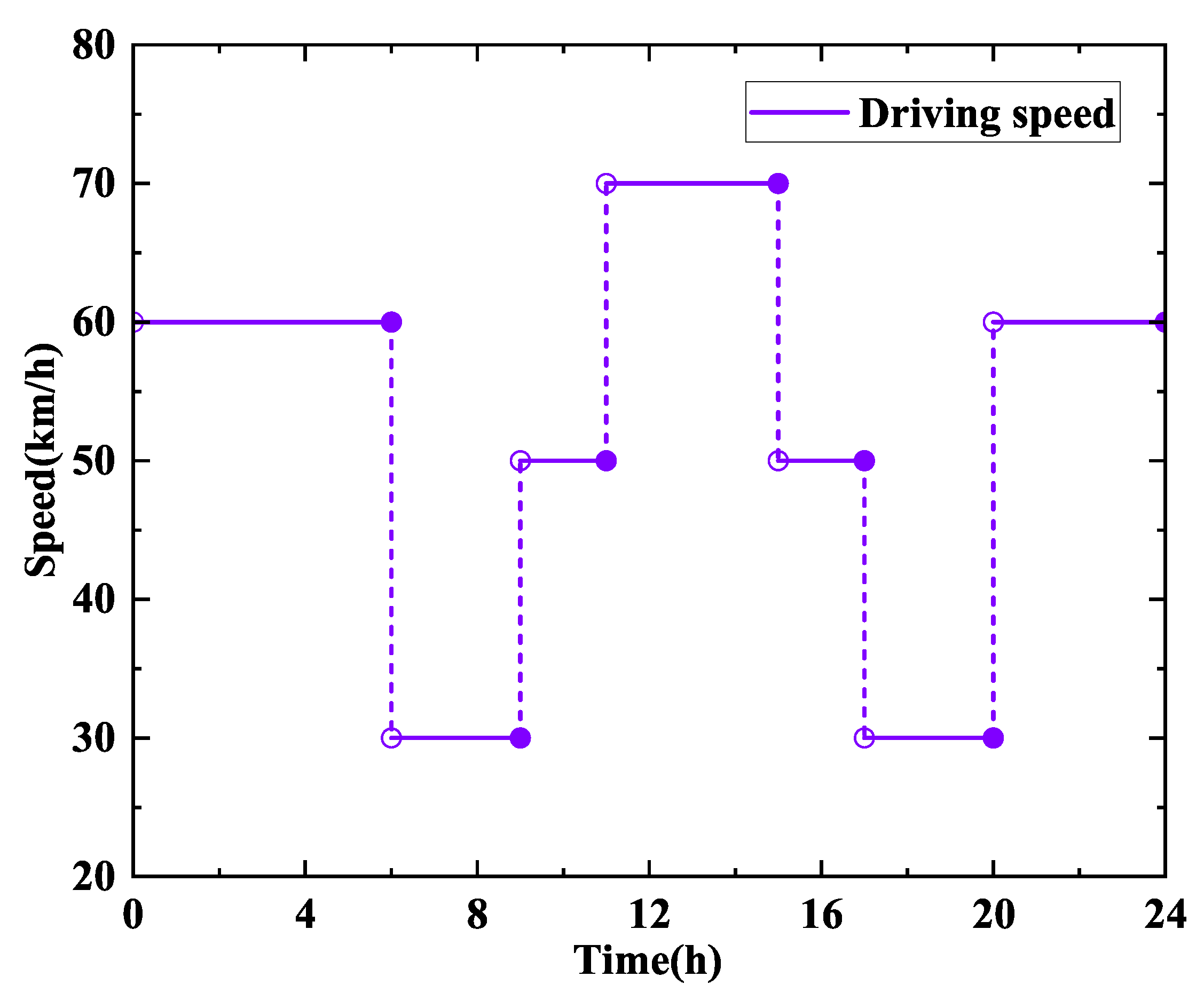
2.3. Time-Varying Speed Function
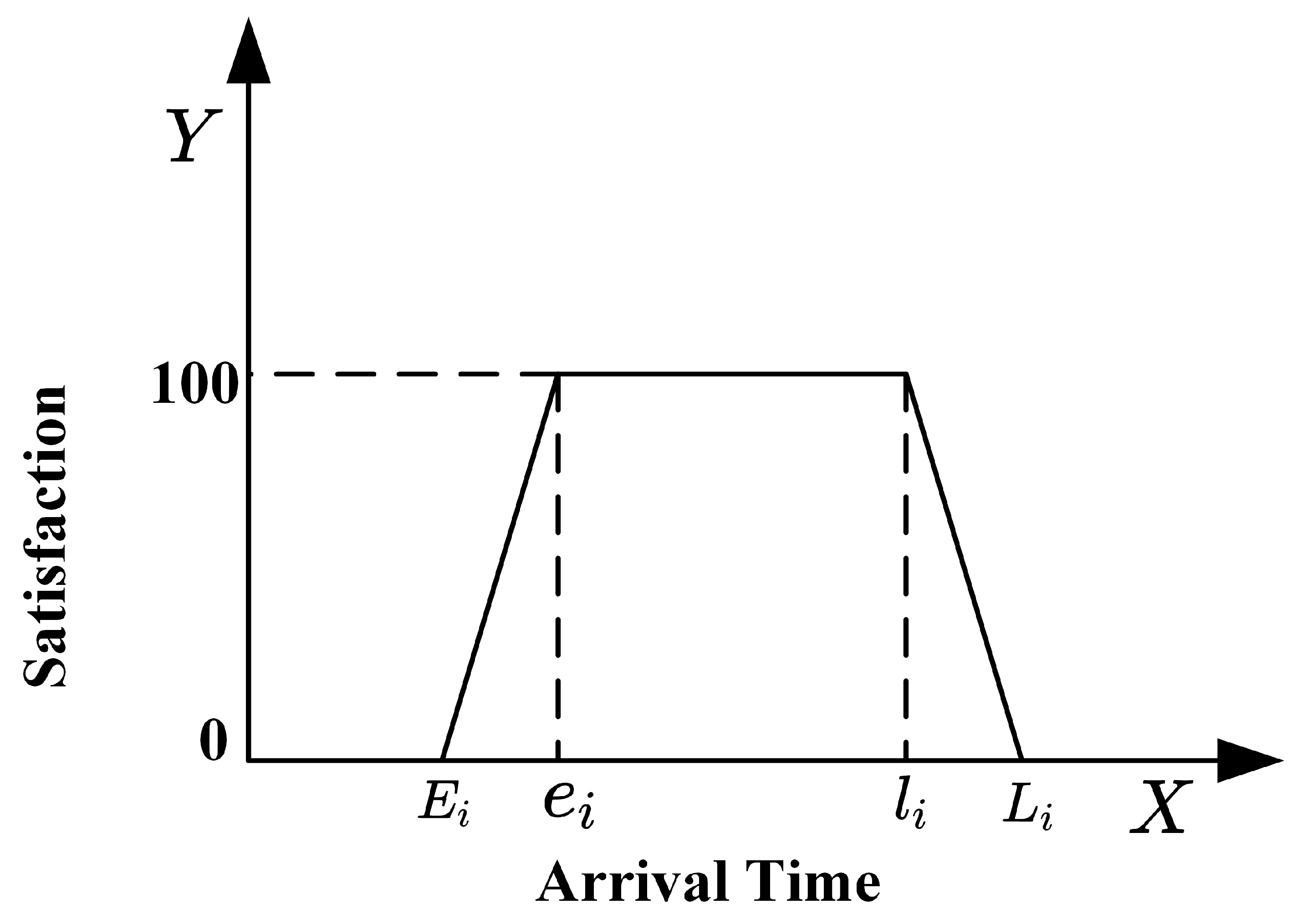
2.4. Customer Satisfaction Trapezoidal Fuzzy Function
2.5. Time Penalty Cost Function
2.6. Parameter Definition
2.7. Proposed Optimization Formulation
3. Solution Approach
3.1. Algorithm Overview
3.1.1. Basic Concepts of Genetic Algorithm
3.1.2. The Characteristics of Genetic Algorithms
- GAs deal with strings encoding a set of parameters rather than the parameters of a problem, which allows them to be widely used in a variety of fields, including optimization, machine learning, image processing, etc.
- In solving the problem, once the genetic strategy is determined, the GA will use the information in the evolutionary process to organize its own search, and can automatically adapt to the complexity of the problem and optimize the search process.
- GA has the advantage of parallel search, can explore the space of multiple solutions at the same time, so as to effectively deal with the huge amount of data, and adapt to the needs of complex computing.
- GA has strong scalability, can be mixed with other optimization algorithms to expand the scope of application, and make it adaptable in more fields.
- GA does not easily fall into the local optimal solution in the search process, especially in the case of irregular or discontinuous fitness function; it still has a greater possibility to find the global optimal solution.
- GA simulates the evolution mechanism of nature, and can efficiently solve some complex optimization problems, especially multi-peak optimization problems and complex problems with multiple constraints.
- As a kind of heuristic algorithm, GA utilizes probability rules to guide the search direction, does not have special requirements on the search space, and is able to carry out effective search in the discrete complex space, which is especially suitable for large-scale or even super-large-scale complex problems.
3.2. Algorithm Design
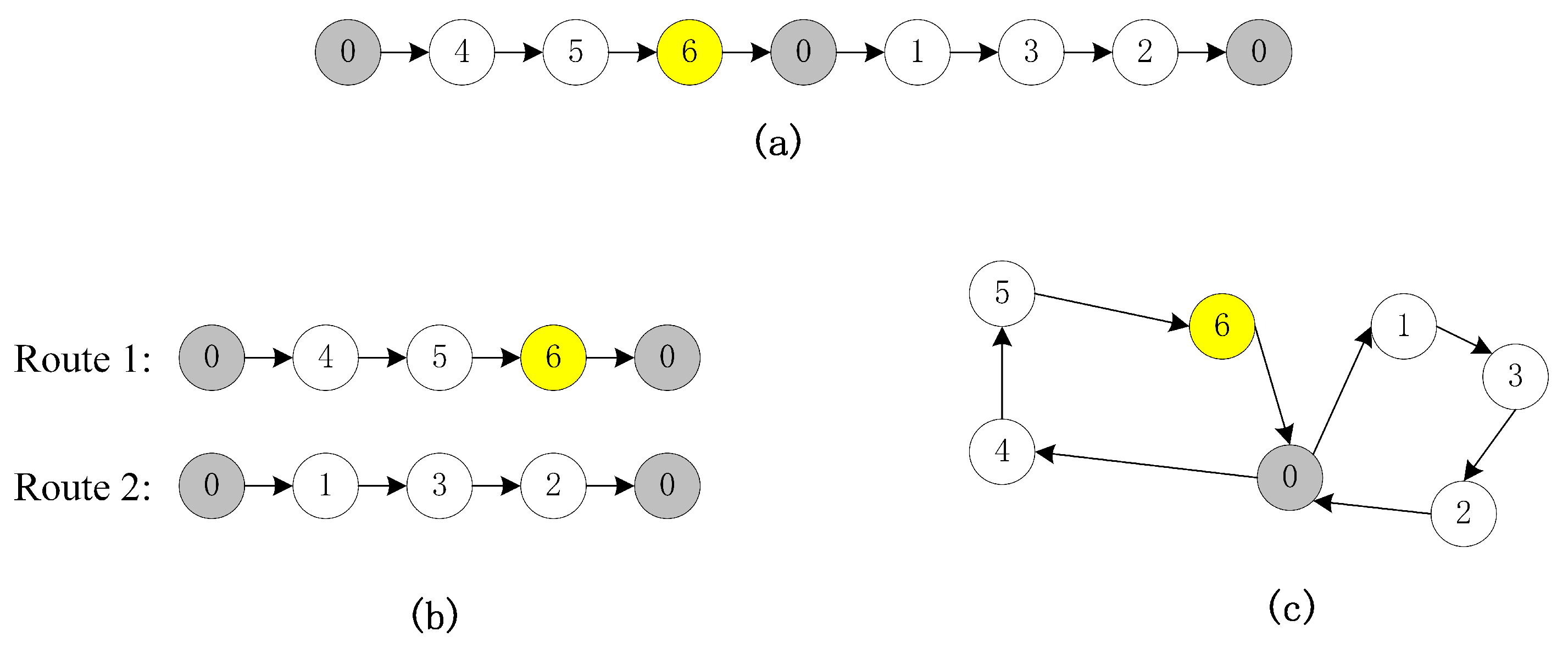
3.2.1. Encoding Scheme Design
3.2.2. Population Initialization
3.2.3. Constraint Handling and Fitness Function
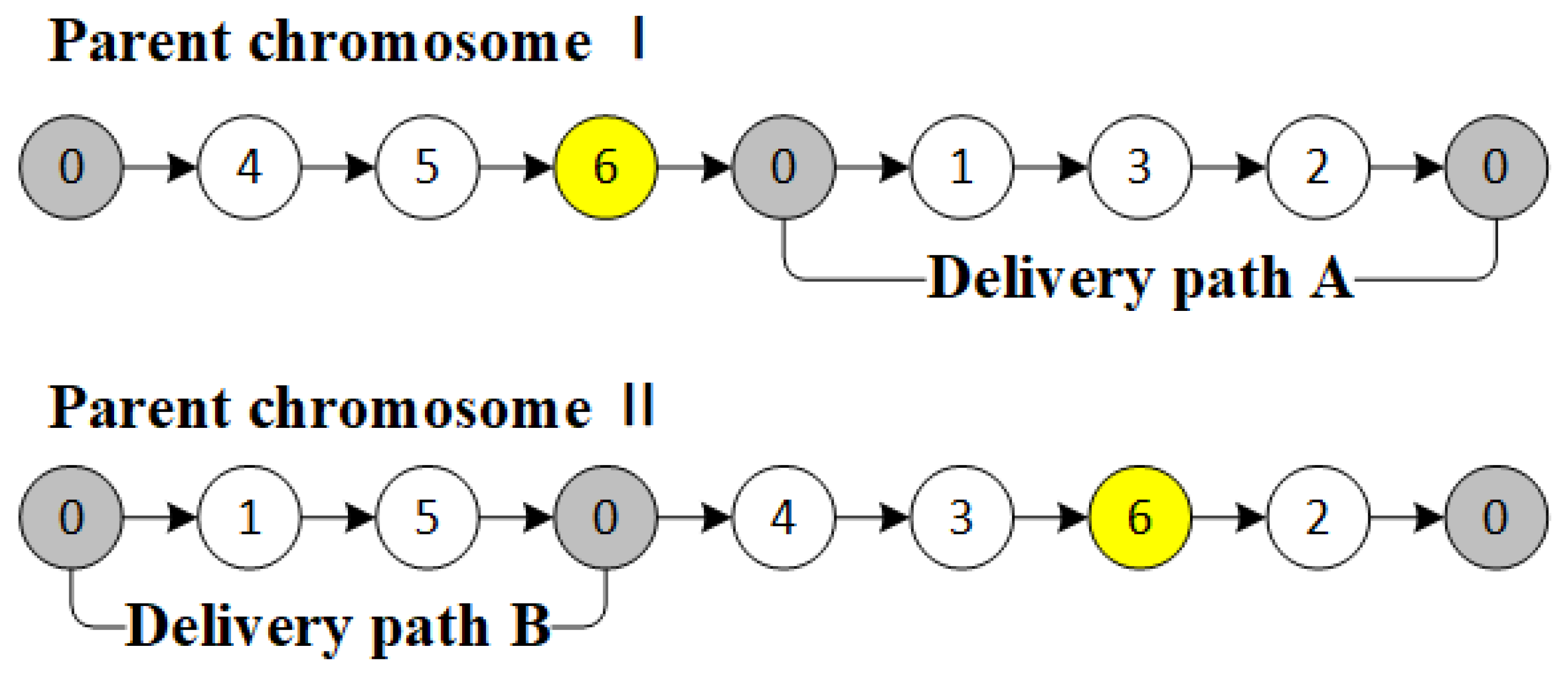
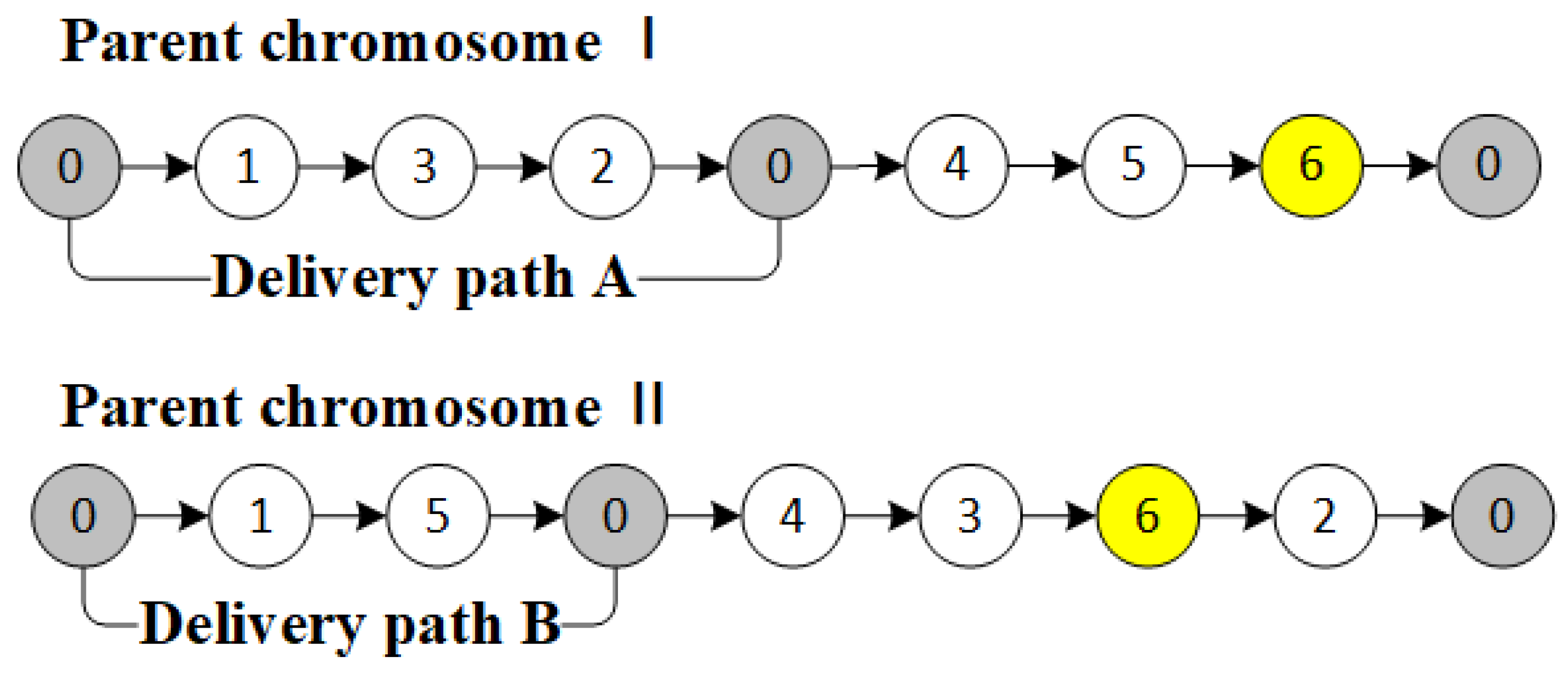
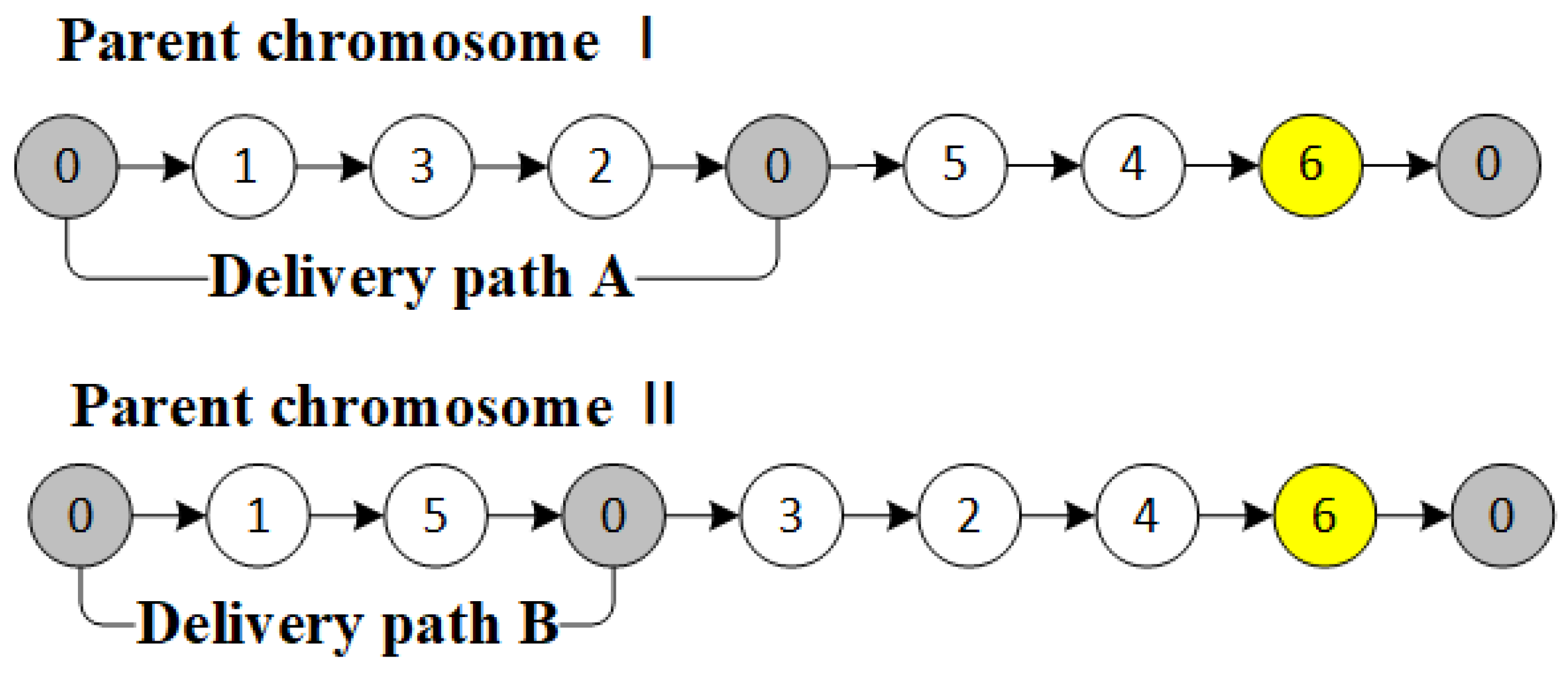
3.2.4. Genetic Operators
| Algorithm 1: Roulette and Tournament |
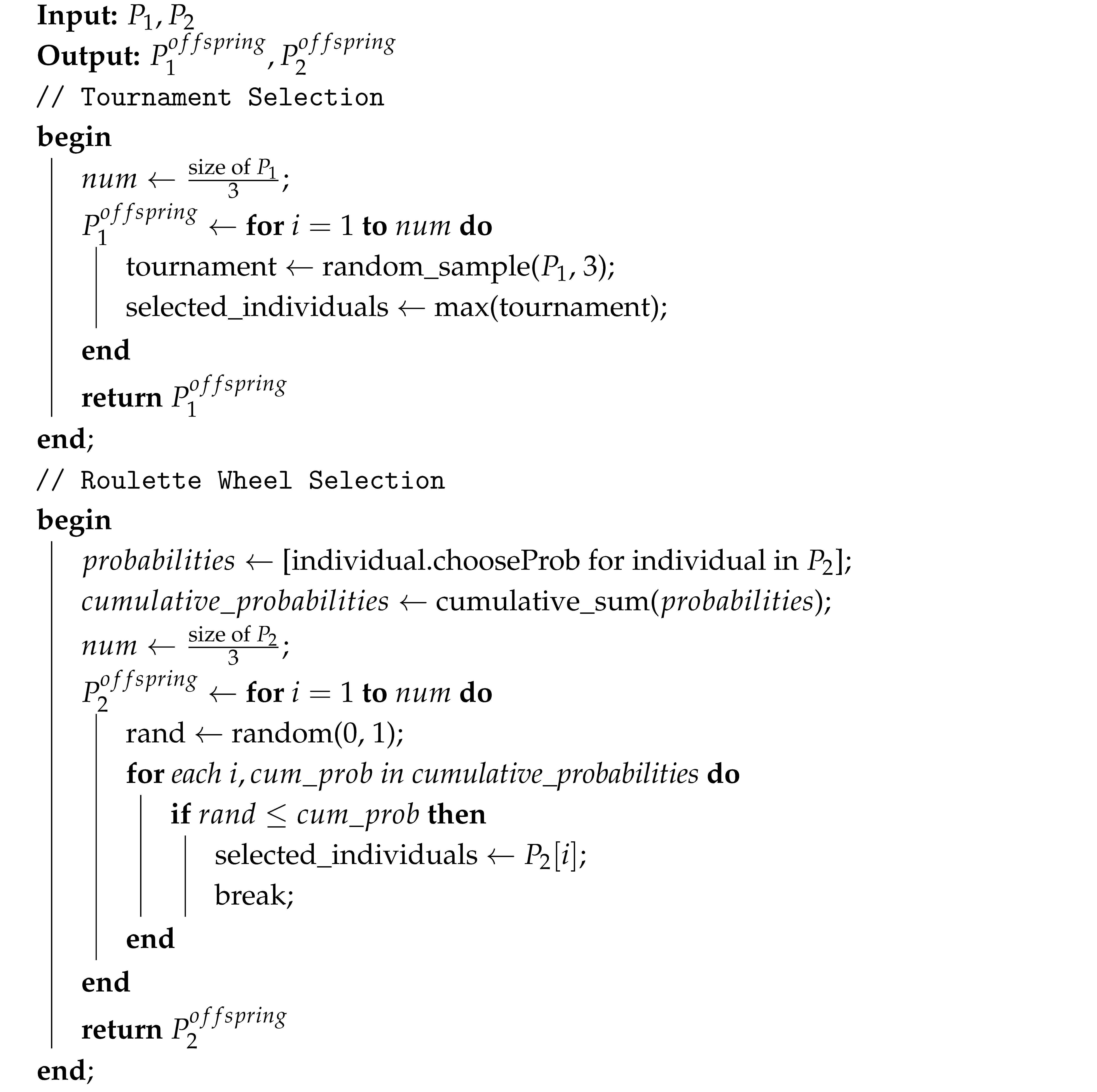 |
3.2.5. Termination Condition
3.2.6. Dual-Population Collaborative Mechanism
3.3. Dual-Population Collaborative Genetic Algorithm (DPCGA)
| Algorithm 2: DPCGA |
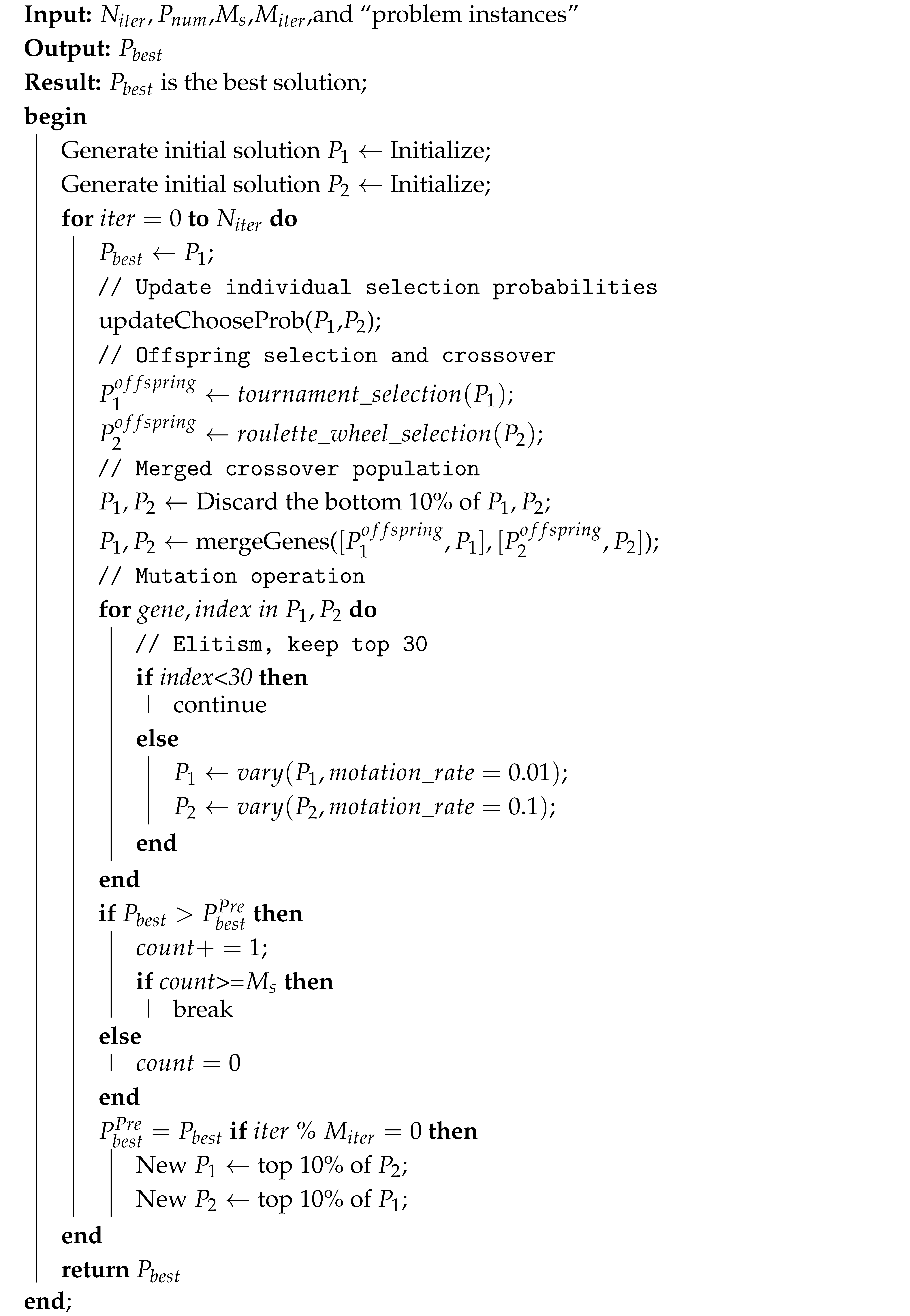 |
4. Experiment
4.1. Test Instances-1
4.1.1. Environment and Parameter Settings
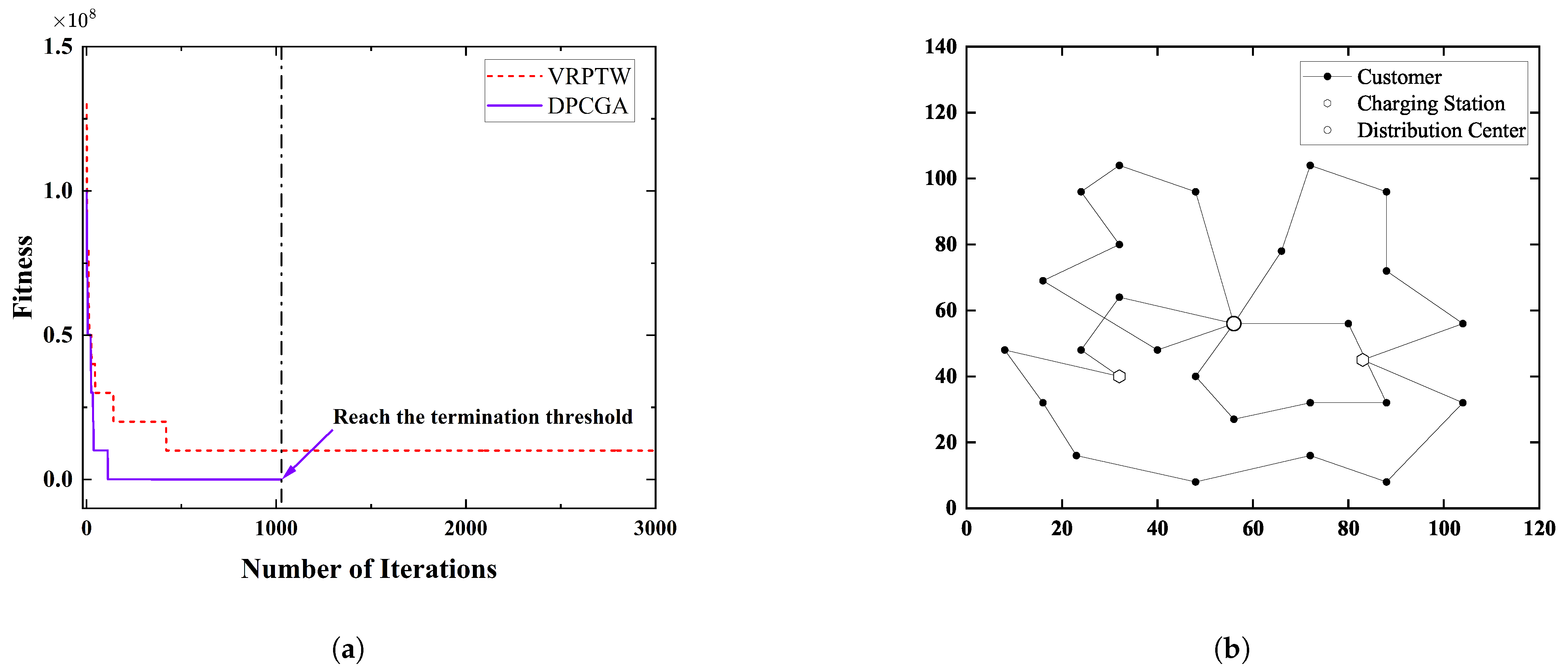
4.1.2. Experimental Results
4.2. Test Instances-2
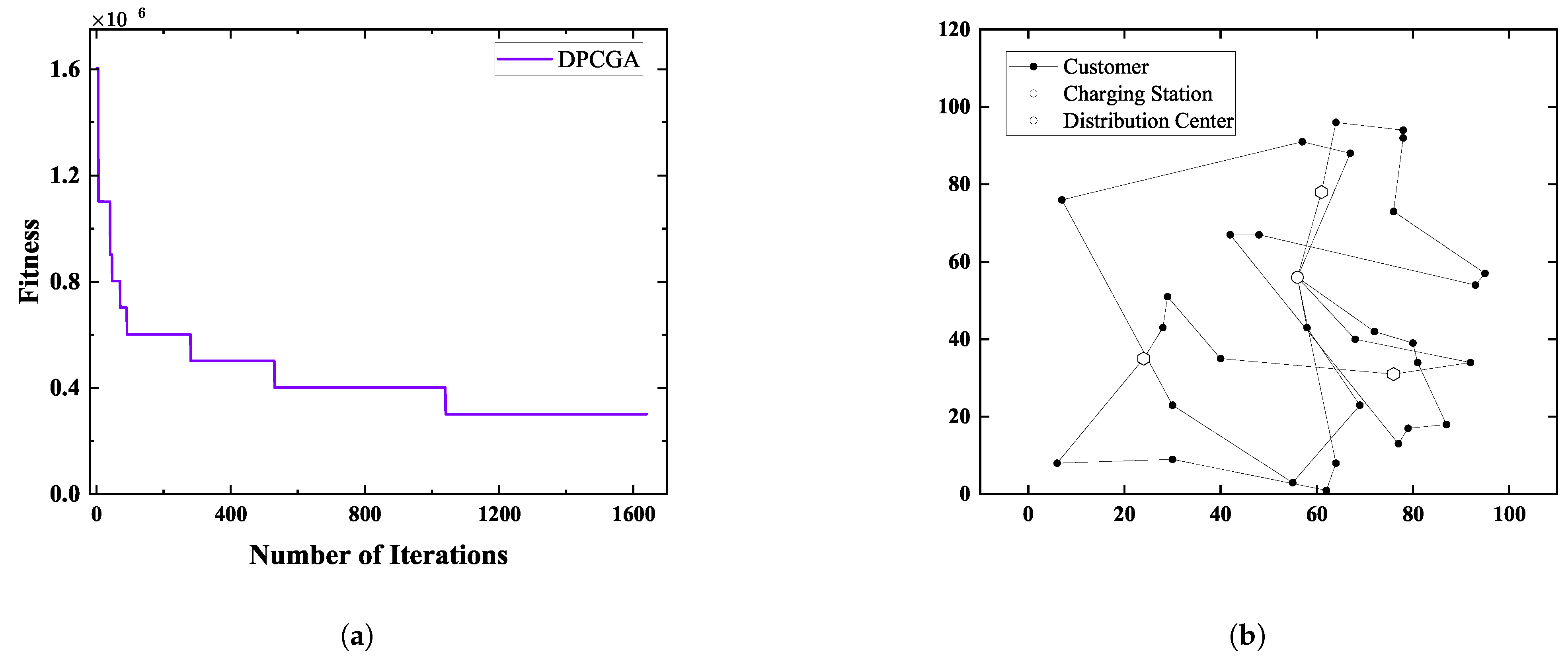
4.2.1. Experimental Results
4.2.2. Algorithm Comparison
5. Sensitivity Analysis
5.1. Impact of the Number of Charging Stations on Path Planning Results
5.2. Impact of Vehicle Range on Path Planning Results
6. Summary and Conclusions
- When using the same dataset as the VRPTW algorithm, the proposed DPCGA algorithm demonstrates excellent performance, finding better solutions with faster convergence times under the same conditions.
- By adopting an evaluation method based on customer satisfaction, the customer satisfaction in VRP-TWTVS-CS improved by an average of 3%, with a 15% reduction in convergence time, and better solutions were found in more complex scenarios. This indicates that in real-world environments, service quality and customer satisfaction can be effectively improved.
- The introduction of the charging station feature further enhances customer satisfaction and alleviates the time waste caused by charging for electric vehicles.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | X | Y | T | en | lh | Server |
|---|---|---|---|---|---|---|
| 0 | 56 | 56 | 0 | 0 | 100 | 0 |
| 1 | 64 | 96 | 0.28 | 7 | 21 | 0.3 |
| 2 | 80 | 39 | 0.12 | 12 | 16 | 0.4 |
| 3 | 69 | 23 | 0.47 | 6 | 11 | 0.1 |
| 4 | 72 | 42 | 0.16 | 5 | 11 | 0.1 |
| 5 | 48 | 67 | 0.06 | 6 | 14 | 0.3 |
| 6 | 58 | 43 | 0.12 | 10 | 20 | 0.4 |
| 7 | 81 | 34 | 0.36 | 5 | 11 | 0.4 |
| 8 | 79 | 17 | 0.45 | 9 | 17 | 0.2 |
| 9 | 30 | 23 | 0.34 | 7 | 13 | 0.4 |
| 10 | 42 | 67 | 0.03 | 11 | 19 | 0.4 |
| 11 | 7 | 76 | 0.22 | 5 | 20 | 0.3 |
| 12 | 29 | 51 | 0.47 | 4 | 19 | 0.3 |
| 13 | 78 | 92 | 0.08 | 10 | 22 | 0.1 |
| 14 | 64 | 8 | 0.36 | 11 | 20 | 0.4 |
| 15 | 95 | 57 | 0.31 | 4 | 16 | 0.2 |
| 16 | 57 | 91 | 0.29 | 6 | 6 | 0.4 |
| 17 | 40 | 35 | 0.05 | 12 | 20 | 0.2 |
| 18 | 68 | 40 | 0.35 | 5 | 12 | 0.1 |
| 19 | 92 | 34 | 0.42 | 3 | 7 | 0.1 |
| 20 | 62 | 1 | 0.24 | 2 | 9 | 0.2 |
| 21 | 28 | 43 | 0.13 | 9 | 14 | 0.2 |
| 22 | 76 | 73 | 0.07 | 2 | 12 | 0.1 |
| 23 | 67 | 88 | 0.24 | 12 | 17 | 0.1 |
| 24 | 93 | 54 | 0.12 | 4 | 13 | 0.2 |
| 25 | 6 | 8 | 0.39 | 10 | 13 | 0.4 |
| 26 | 87 | 18 | 0.05 | 7 | 16 | 0.3 |
| 27 | 30 | 9 | 0.08 | 7 | 14 | 0.2 |
| 28 | 24 | 35 | 0 | 0 | 100 | 0.4 |
| 29 | 61 | 78 | 0 | 0 | 100 | 0.4 |
| 30 | 76 | 31 | 0 | 0 | 100 | 0.4 |
References
- Rupnik, B.; Wang, Y.; Kramberger, T. Hybrid Model for Motorway EV Fast-Charging Demand Analysis Based on Traffic Volume. Systems 2025, 13, 272. [Google Scholar] [CrossRef]
- El Wafi, M.; Youssefi, M.A.; Dakir, R.; Bakir, M. Intelligent Robot in Unknown Environments: Walk Path Using Q-Learning and Deep Q-Learning. Automation 2025, 6, 12. [Google Scholar] [CrossRef]
- Han, Z.; Guo, W. Dynamic UAV Task Allocation and Path Planning with Energy Management Using Adaptive PSO in Rolling Horizon Framework. Appl. Sci. 2025, 15, 4220. [Google Scholar] [CrossRef]
- Sarhan, S.; Rinaldi, M.; Primatesta, S.; Guglieri, G. Noise-Aware UAV Path Planning in Urban Environment with Reinforcement Learning. Eng. Proc. 2025, 90, 3. [Google Scholar] [CrossRef]
- Sun, G.; Zhang, Y.; Liao, D.; Yu, H.; Du, X.; Guizani, M. Bus-Trajectory-Based Street-Centric Routing for Message Delivery in Urban Vehicular Ad Hoc Networks. IEEE Trans. Veh. Technol. 2018, 67, 7550–7563. [Google Scholar] [CrossRef]
- Sun, G.; Zhang, Y.; Yu, H.; Du, X.; Guizani, M. Intersection Fog-Based Distributed Routing for V2V Communication in Urban Vehicular Ad Hoc Networks. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2409–2426. [Google Scholar] [CrossRef]
- Sun, G.; Song, L.; Yu, H.; Chang, V.; Du, X.; Guizani, M. V2V Routing in a VANET Based on the Autoregressive Integrated Moving Average Model. IEEE Trans. Veh. Technol. 2019, 68, 908–922. [Google Scholar] [CrossRef]
- Xiao, J.; Ren, Y.; Du, J.; Zhao, Y.; Kumari, S.; Alenazi, M.J.; Yu, H. CALRA: Practical Conditional Anonymous and Leakage-Resilient Authentication Scheme for Vehicular Crowdsensing Communication. IEEE Trans. Intell. Transp. Syst. 2025, 26, 1273–1285. [Google Scholar] [CrossRef]
- Gaon, T.; Gabay, Y.; Weiss Cohen, M. Optimizing Electric Vehicle Routing Efficiency Using K-Means Clustering and Genetic Algorithms. Future Internet 2025, 17, 97. [Google Scholar] [CrossRef]
- Gan, H.; Ruan, W.; Wang, M.; Pan, Y.; Miu, H.; Yuan, X. Bi-Level Planning of Electric Vehicle Charging Stations Considering Spatial–Temporal Distribution Characteristics of Charging Loads in Uncertain Environments. Energies 2024, 17, 3004. [Google Scholar] [CrossRef]
- Liu, S.; Zhou, W.; Qin, M.; Peng, X. Tent–PSO-Based Unmanned Aerial Vehicle Path Planning for Cooperative Relay Networks in Dynamic User Environments. Sensors 2025, 25, 2005. [Google Scholar] [CrossRef]
- Xiao, S.; Tan, X.; Wang, J. A Simulated Annealing Algorithm and Grid Map-Based UAV Coverage Path Planning Method for 3D Reconstruction. Electronics 2021, 10, 853. [Google Scholar] [CrossRef]
- Chen, Q.; Yao, G.; Yang, L.; Liu, T.; Sun, J.; Cai, S. Research on Ship Replenishment Path Planning Based on the Modified Whale Optimization Algorithm. Biomimetics 2025, 10, 179. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Qin, F.; Xiang, X.; Jiang, H.; Zhang, X. A Dual-Population-Based Co-Evolutionary Algorithm for Capacitated Electric Vehicle Routing Problems. IEEE Trans. Transp. Electrif. 2024, 10, 2663–2676. [Google Scholar] [CrossRef]
- Zhang, S.; Du, H.; Borucki, S.; Jin, S.; Hou, T.; Li, Z. Dual Resource Constrained Flexible Job Shop Scheduling Based on Improved Quantum Genetic Algorithm. Machines 2021, 9, 108. [Google Scholar] [CrossRef]
- Wang, J. Research on AUV Path Planning Method Based on Improved Dual-Population Genetic Algorithm. Autom. Technol. Appl. 2010, 29, 13–16. [Google Scholar]
- Tan, Y.; Tan, G.-Z.; Ye, Y.; Wu, X.-D. Dual Population Genetic Algorithm with Chaotic Local Search Strategy. Appl. Res. Comput. 2011, 28, 469–471. Available online: https://api.semanticscholar.org/CorpusID:63737957 (accessed on 10 April 2025).
- Nie, J.; Wu, J.; Wu, L.; Ren, L.; Yang, J. Study on Urban Road Speed Limits Based on Pedestrian and Bicycle Traffic Safety. China J. Highw. Transp. 2014, 27, 91–97. [Google Scholar]
- Yang, F.; Tao, F. A Bi-Objective Optimization VRP Model for Cold Chain Logistics: Enhancing Cost Efficiency and Customer Satisfaction. IEEE Access 2023, 11, 127043–127056. [Google Scholar] [CrossRef]
- Alhijawi, B.; Awajan, A. Genetic Algorithms: Theory, Genetic Operators, Solutions, and Applications. Evol. Intel. 2024, 17, 1245–1256. [Google Scholar] [CrossRef]
- Naaman, D.; Ahmed, B.; Ibrahim, I. Optimization by Nature: A Review of Genetic Algorithm Techniques. Indones. J. Comput. Sci. 2025, 14. [Google Scholar] [CrossRef]
- Zhou, K.; Oh, S.K.; Pedrycz, W.; Qiu, J.; Seo, K. A Self-Organizing Deep Network Architecture Designed Based on LSTM Network via Elitism-Driven Roulette-Wheel Selection for Time-Series Forecasting. Knowl. Based Syst. 2024, 289, 111481. [Google Scholar] [CrossRef]
- Wang, X.; Yu, X. Differential Evolution Algorithm with Three Mutation Operators for Global Optimization. Mathematics 2024, 12, 2311. [Google Scholar] [CrossRef]
- Karaköse, E. A new last mile delivery approach for the hybrid truck multi-drone problem using a genetic algorithm. Appl. Sci. 2024, 14, 616. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, H.; Bai, X.; Zhang, S.; Xu, C. The path planning of mobile robots based on an improved genetic algorithm. Appl. Sci. 2025, 15, 3700. [Google Scholar] [CrossRef]
- Lu, M.; Wang, S. An improved spider wasp optimizer for green vehicle route planning in flower collection. Appl. Sci. 2025, 15, 4992. [Google Scholar] [CrossRef]
- Liu, Z.; Li, X. Optimization Model of Cold Chain Logistics Delivery Path Based on Genetic Algorithm. Int. J. Ind. Eng. Theory Appl. Pract. 2024, 31, 152. [Google Scholar] [CrossRef]
- Gao, S. Research on Path Optimization Problem with Time Windows Based on Electric Vehicles. Master’s Thesis, Dalian Maritime University, Dalian, China, 2015. [Google Scholar]

| Symbol | Symbol Description | Unit |
|---|---|---|
| N | Customer Point Assembly | \ |
| K | Distribution Vehicle Collection, denoted by subscript k | \ |
| O | Distribution Center, denoted by subscript o | \ |
| H | Charging Station Collection | \ |
| Z | Collection of distribution centers, customer points, and charging stations, subscripted as z, | \ |
| C | Transportation cost per unit placement distance of the distribution vehicle | \ |
| Distance from point i to point j, | m | |
| Demand quantity of the customer at point i, | t | |
| Q | Rated load capacity of the delivery vehicle | t |
| Arrival time of the delivery vehicle at point i | \ | |
| Time for the delivery vehicle to leave point i | \ | |
| Time for the delivery vehicle to wait at point i, | min | |
| Earliest service time requested by the customer at point i, | \ | |
| Late service time requested by the customer at point i, | \ | |
| Time interval in which the customer can accept the shipment Time interval | \ | |
| The time required for the delivery vehicle to travel from point i to point j, | min | |
| The time taken by the delivery vehicle k to get to point i, | \ | |
| The remaining charge of the delivery vehicle k when it is at point i, | \ | |
| P | The battery capacity of the delivery vehicle | \ |
| Speed at which the delivery vehicle is traveling at different times, | m/s | |
| Delivery vehicle k from point i to point j, | \ | |
| Customer i delivery done by vehicle k, | \ |
| Algorithm | NoV | RT (s) | DC |
|---|---|---|---|
| DPCGA | 3 | 11 | 6494.9 |
| VRPTW | 3 | 24 | 6542.7 |
| Scale | |||
|---|---|---|---|
| Small | 30 | 3 | 4 |
| Medium | 50 | 5 | 5 |
| Large | 100 | 8 | 7 |
| Scale | Name | DPCGA | ESA-VRPO | AVNS | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Avg.DC | NoV | RT | Avg.DC | NoV | RT | Avg.DC | NoV | RT | ||
| Small | S1 | 93.21 | 3 | 34 | 92.98 | 3 | 42 | 92.19 | 3 | 45 |
| S2 | 91.21 | 3 | 33 | 91.09 | 3 | 41 | 92.01 | 3 | 46 | |
| S3 | 92.23 | 3 | 33 | 91.44 | 3 | 46 | 90.21 | 3 | 45 | |
| S4 | 95.94 | 3 | 35 | 93.22 | 3 | 44 | 94.24 | 3 | 46 | |
| S5 | 94.23 | 3 | 31 | 94.11 | 3 | 43 | 93.13 | 3 | 46 | |
| Medium | M1 | 90.25 | 4 | 89 | 89.25 | 4 | 94 | 90.22 | 4 | 87 |
| M2 | 91.65 | 4 | 79 | 92.15 | 4 | 91 | 91.65 | 4 | 91 | |
| M3 | 94.12 | 4 | 80 | 90.24 | 4 | 93 | 91.02 | 4 | 81 | |
| M4 | 91.28 | 4 | 86 | 90.18 | 4 | 100 | 89.21 | 4 | 80 | |
| M5 | 93.23 | 4 | 84 | 93.03 | 4 | 96 | 91.23 | 4 | 91 | |
| Large | L1 | 92.33 | 6 | 203 | 91.23 | 7 | 252 | 89.11 | 6 | 289 |
| L2 | 91.23 | 6 | 254 | 89.56 | 6 | 280 | 88.98 | 6 | 264 | |
| L3 | 93.45 | 6 | 198 | 90.22 | 6 | 232 | 90.92 | 7 | 231 | |
| L4 | 96.21 | 7 | 234 | 92.32 | 7 | 250 | 90.11 | 7 | 255 | |
| L5 | 92.92 | 6 | 267 | 90.01 | 6 | 279 | 88.21 | 7 | 295 | |
| Scale | Algorithm | C | Mean RT | Std Dev RT | 95% CI Lower | 95% CI Upper |
|---|---|---|---|---|---|---|
| Small | DPCGA | 6492.1 | 33.2 | 1.48324 | 31.35831 | 35.04169 |
| ESA-VRPO | 6572.3 | 43.2 | 1.923538 | 40.81161 | 45.58839 | |
| AVNS | 6511.4 | 45.6 | 4.037326 | 40.587 | 50.613 | |
| Medium | DPCGA | 9021.4 | 83.6 | 4.159327 | 78.43551 | 88.76449 |
| ESA-VRPO | 9194.9 | 94.8 | 4.91935 | 88.69182 | 100.9082 | |
| AVNS | 9188.6 | 86 | 5.291503 | 79.42973 | 92.57027 | |
| Large | DPCGA | 13,213.4 | 231.2 | 18.8865 | 207.7493 | 254.6507 |
| ESA-VRPO | 13,910.8 | 258.6 | 20.61068 | 233.0085 | 284.1915 | |
| AVNS | 14,001.2 | 266.8 | 26.06147 | 234.4404 | 299.1596 |
| SC-1 | SC-2 | SC-3 | SC-4 | SC-5 | Average | |
|---|---|---|---|---|---|---|
| 5 | 2118.791 | 2048.583 | 1840.131 | 2074.797 | 1838.124 | 1984.085 |
| 89.69232 | 91.144 | 88.43677 | 91.38577 | 91.80182 | 90.49213 | |
| 7 | 2010.093 | 1767.228 | 2014.394 | 1998.466 | 1926.308 | 1943.297 |
| 91.67233 | 89.9857 | 91.70737 | 90.36707 | 90.18211 | 90.78292 | |
| 10 | 2069.498 | 2019.218 | 1940.303 | 1921.587 | 1843.94 | 1958.909 |
| 89.37592 | 88.36692 | 90.50012 | 91.97084 | 92.33602 | 90.50996 |
| SC-1 | SC-2 | SC-3 | SC-4 | SC-5 | Average | |
|---|---|---|---|---|---|---|
| 400 KM | 2052.811 | 2057.504 | 1967.373 | 1936.823 | 2023.002 | 2007.503 |
| 93.18418 | 91.08811 | 91.40597 | 89.80545 | 90.03924 | 91.10459 | |
| 300 KM | 1929.917 | 1828.329 | 2366.078 | 1805.997 | 2003.629 | 1986.79 |
| 88.3889 | 91.63132 | 92.63935 | 87.74532 | 91.67916 | 90.41681 | |
| 200 KM | 2004.126 | 2030.209 | 1996.23 | 2062.861 | 2259.379 | 2070.561 |
| 89.61487 | 91.58579 | 88.37952 | 88.45071 | 91.35766 | 89.87771 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, Y.; Chang, H.; Yu, P.; Ye, T.; Wang, Y. Advanced Vehicle Routing for Electric Fleets Using DPCGA: Addressing Charging and Traffic Constraints. Mathematics 2025, 13, 1698. https://doi.org/10.3390/math13111698
Zheng Y, Chang H, Yu P, Ye T, Wang Y. Advanced Vehicle Routing for Electric Fleets Using DPCGA: Addressing Charging and Traffic Constraints. Mathematics. 2025; 13(11):1698. https://doi.org/10.3390/math13111698
Chicago/Turabian StyleZheng, Yuehan, Hao Chang, Peng Yu, Taofeng Ye, and Ying Wang. 2025. "Advanced Vehicle Routing for Electric Fleets Using DPCGA: Addressing Charging and Traffic Constraints" Mathematics 13, no. 11: 1698. https://doi.org/10.3390/math13111698
APA StyleZheng, Y., Chang, H., Yu, P., Ye, T., & Wang, Y. (2025). Advanced Vehicle Routing for Electric Fleets Using DPCGA: Addressing Charging and Traffic Constraints. Mathematics, 13(11), 1698. https://doi.org/10.3390/math13111698