

A Surrogate Model for the Rapid Prediction of Factor of Safety in Slopes with Spatial Variability



Abstract
1. Introduction
2. Characterization of Spatial Variability in Geomaterials
2.1. Spatial Variability of Geotechnical Parameters
2.2. Simulation of Spatially Variable Geotechnical Parameters Based on Cholesky Decomposition
3. A Surrogate Model for the Rapid Prediction of Factor of Safety in Slopes with Spatial Variability
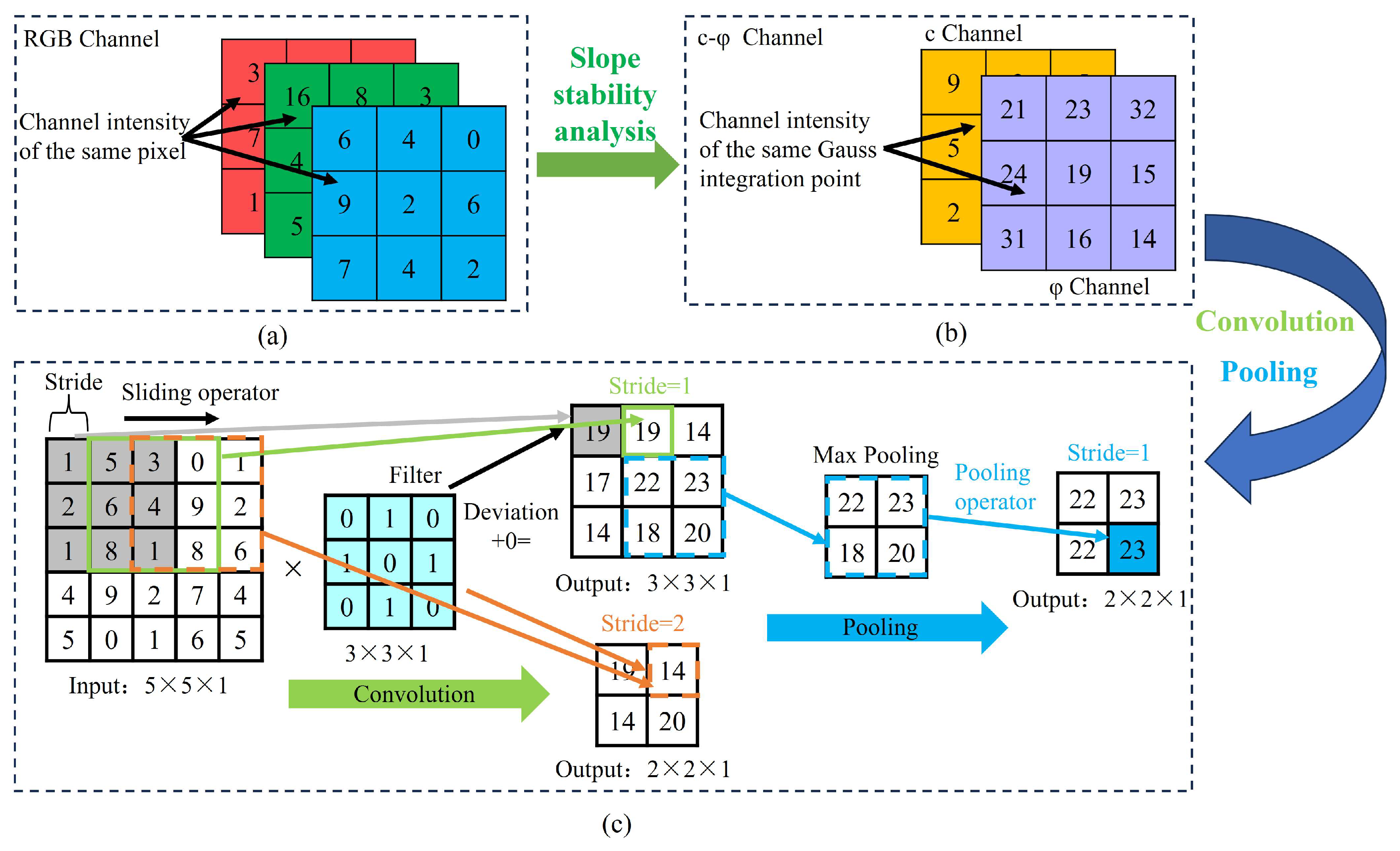
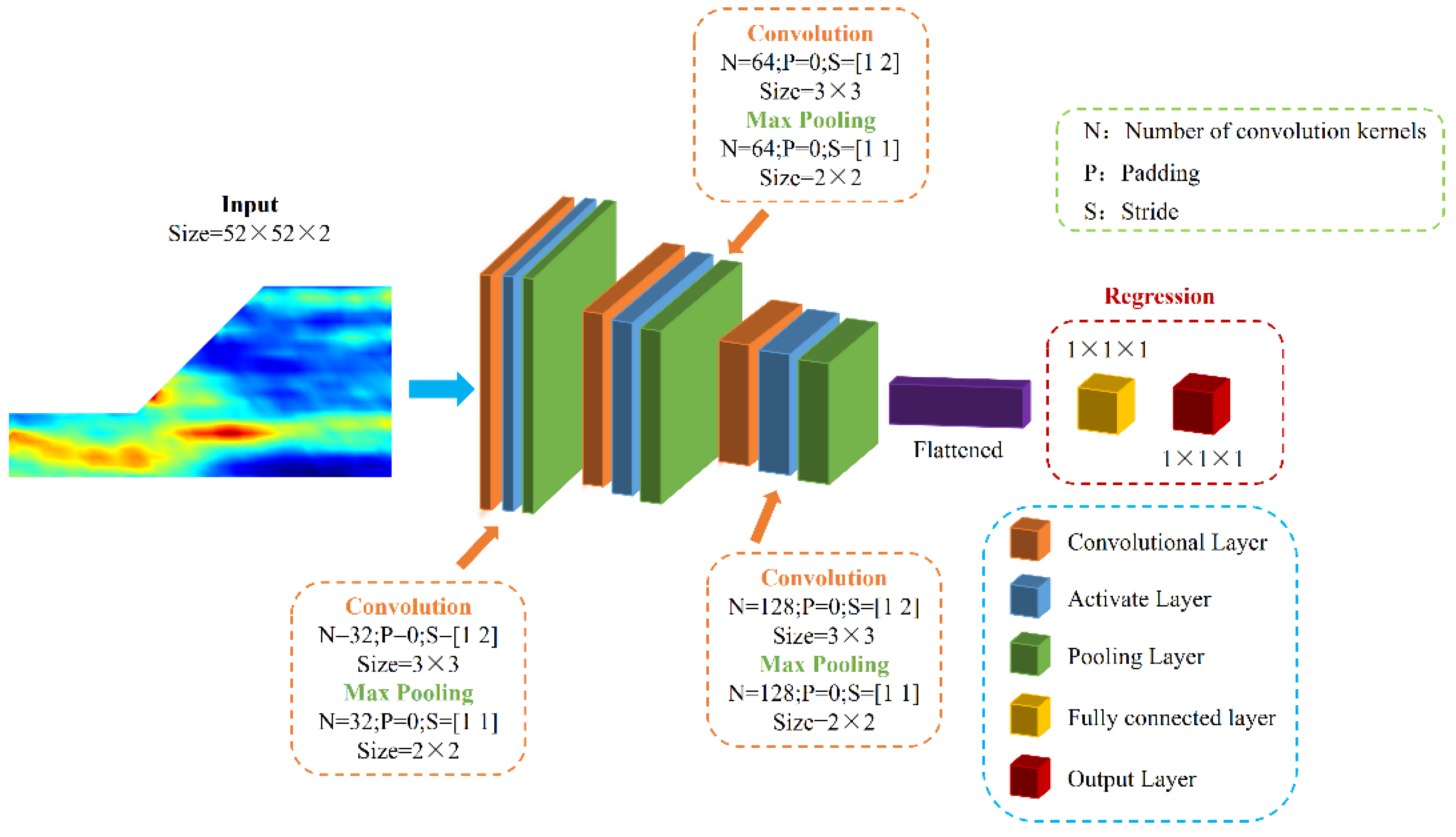
3.1. CNN-Based Surrogate Model
3.2. Workflow for Rapid Prediction of Factor of Safety in Slopes with Spatial Variability
- (1)
- Define Slope Geometry and Soil Statistical Properties
- (2)
- Generate Random Field Distributions of Soil Parameters
- (3)
- Compute the Fs for a Single Spatially Variable Slope
- (4)
- Perform Monte Carlo Simulations
- (5)
- Construct the Training Dataset for the Surrogate Model
- (6)
- Split the Dataset and Evaluate Model Performance
4. Analysis of Prediction Results
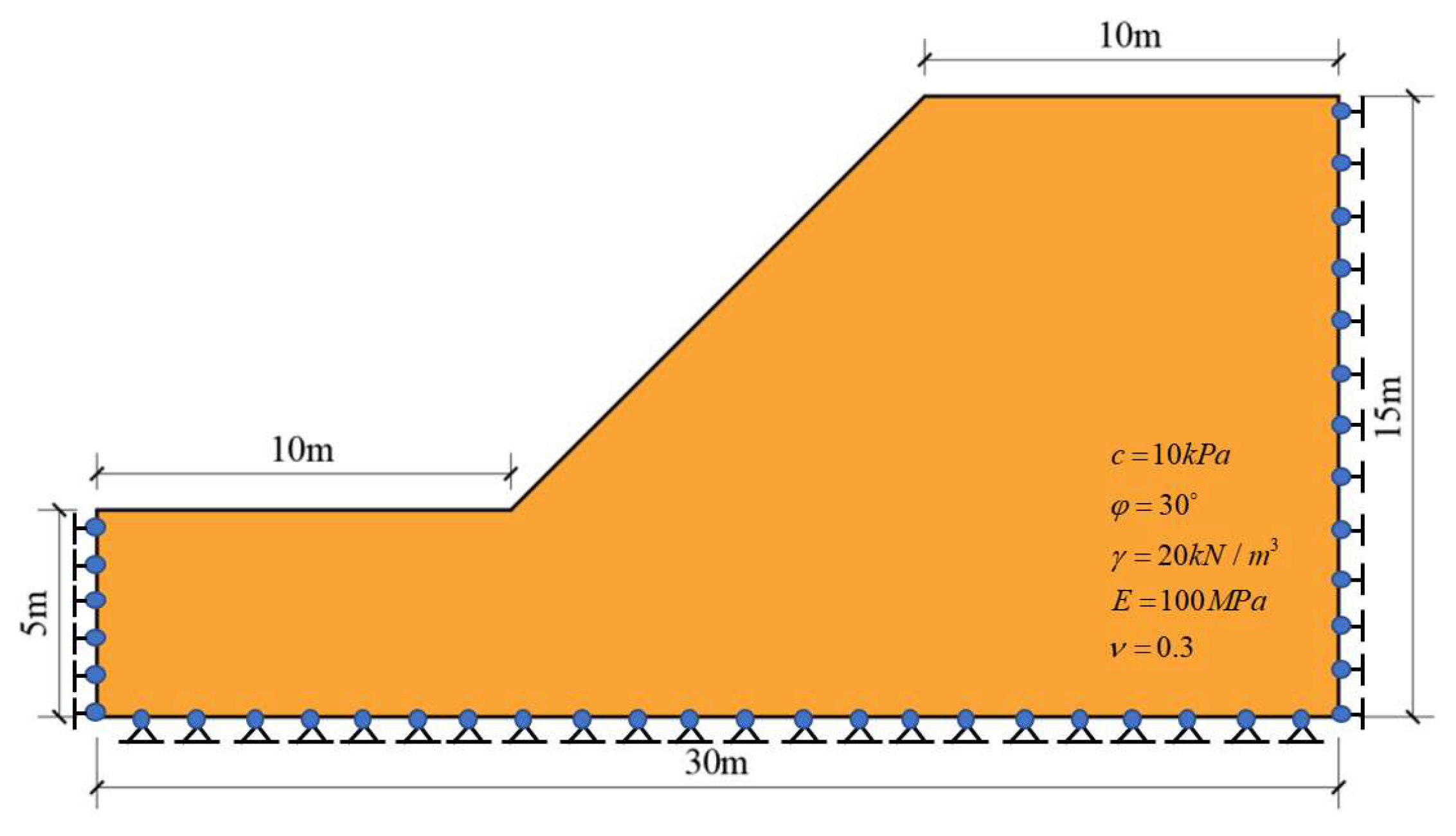
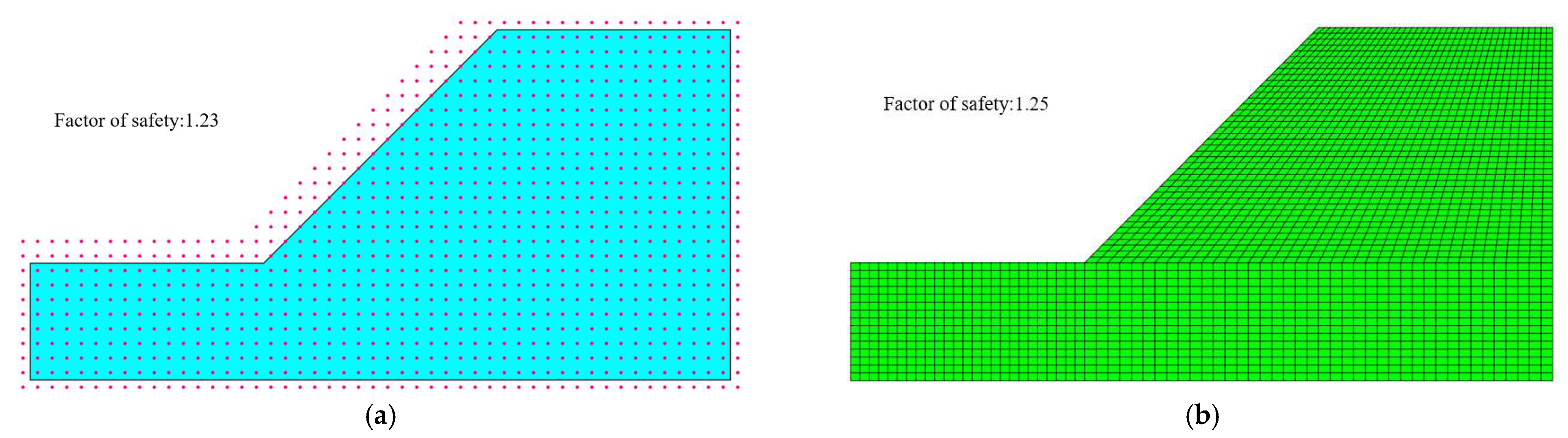
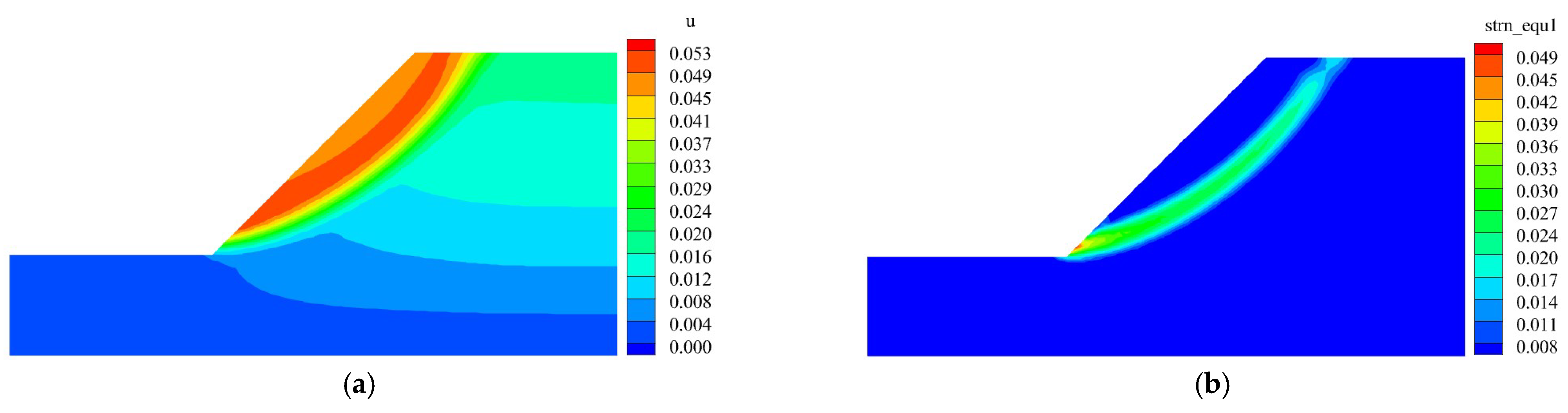
4.1. Slope Description and Deterministic Analysis
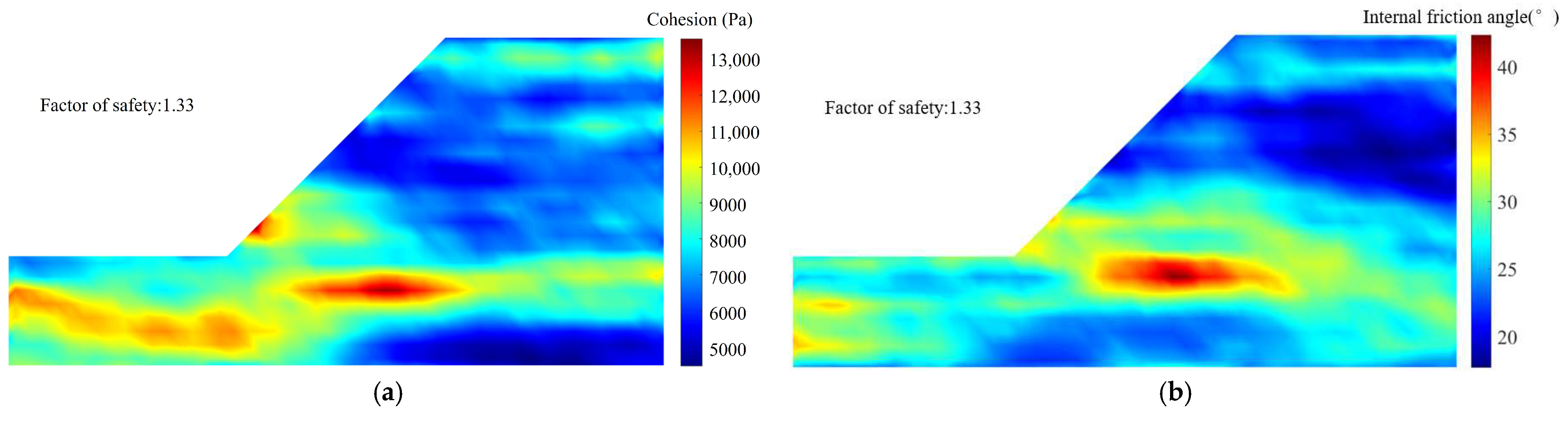
4.2. Random Field Distribution of Spatially Variable Slopes
4.3. Surrogate Model-Based Factor of Safety Prediction Analysis
5. Conclusions
- (1)
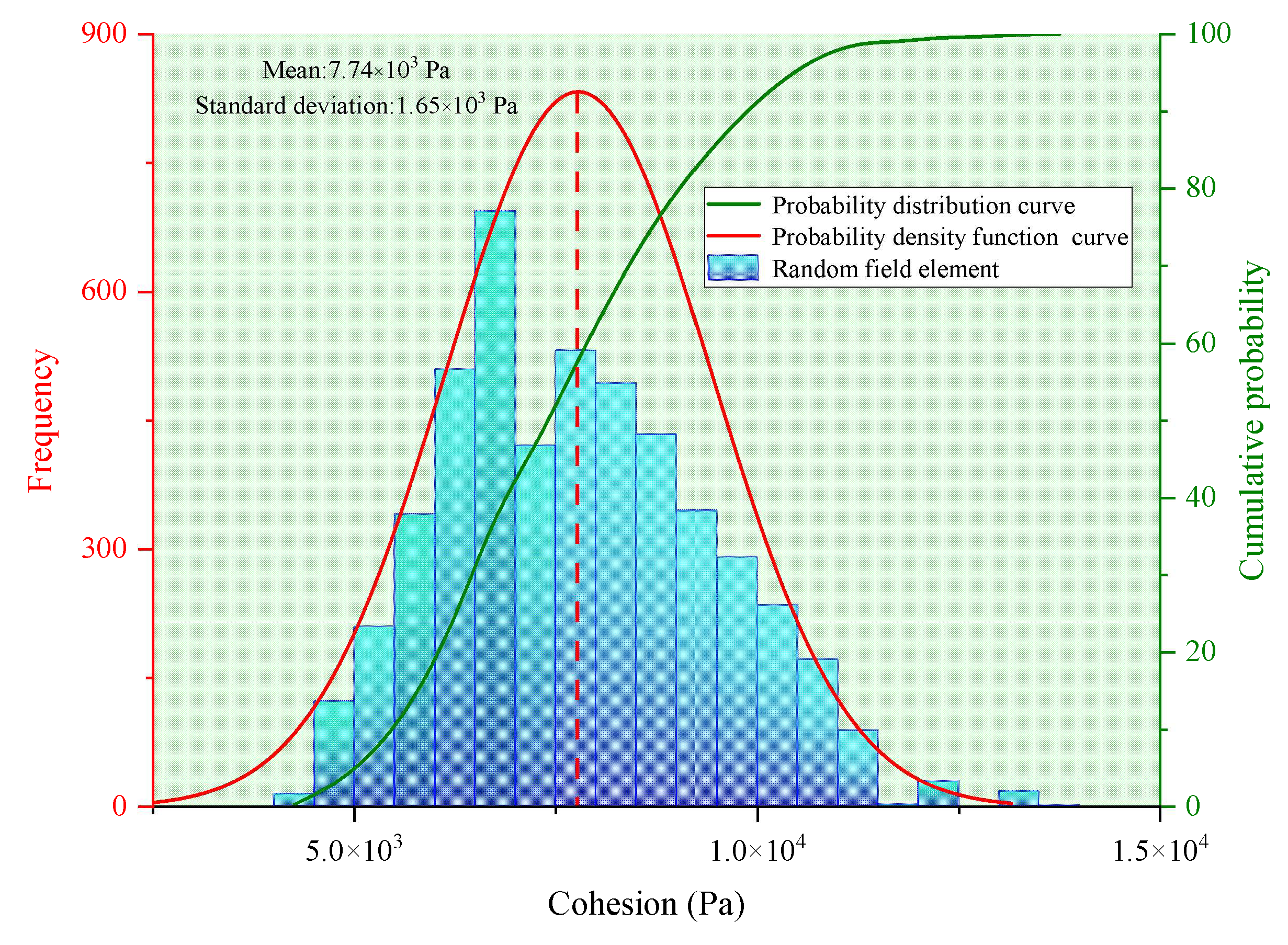
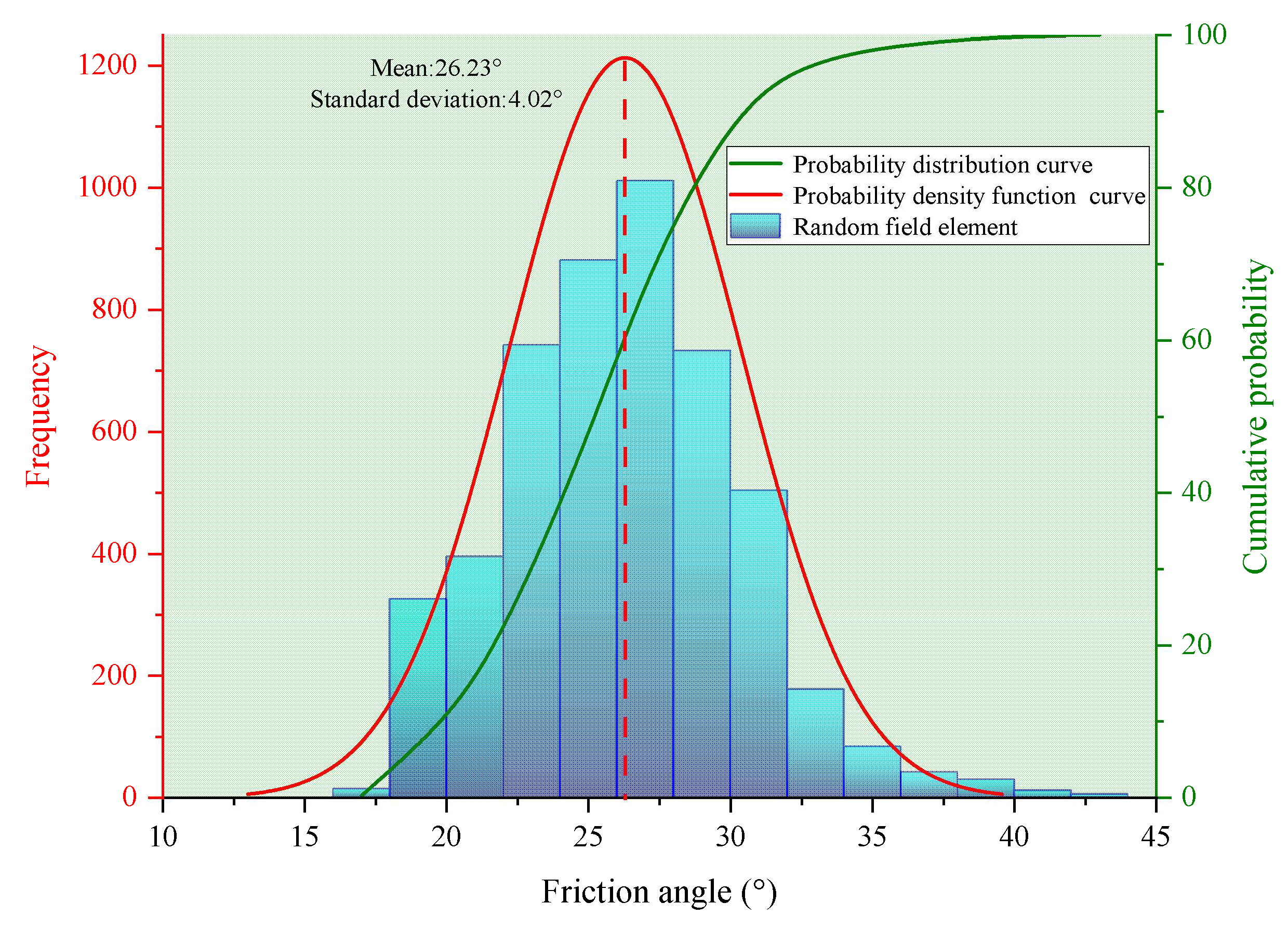
- A Gaussian random field model was established for c and φ, and the results confirm that their distributions align well with statistical assumptions. This model effectively captures the spatial uncertainty and correlation of geotechnical parameters, providing a theoretical basis for slope stability analysis.
- (2)
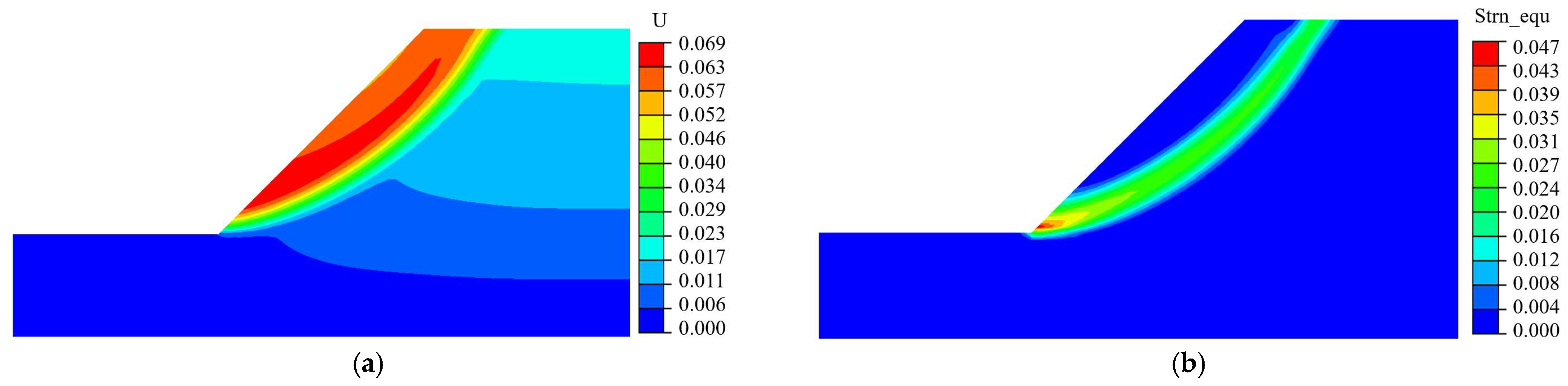
- Compared with deterministic analysis, the random field approach yields Fs values that better reflect the uncertainty in geotechnical parameters. Spatial variability can induce localized strength reductions, potentially affecting overall stability, highlighting the necessity of incorporating random field modeling in slope stability assessment.
- (3)
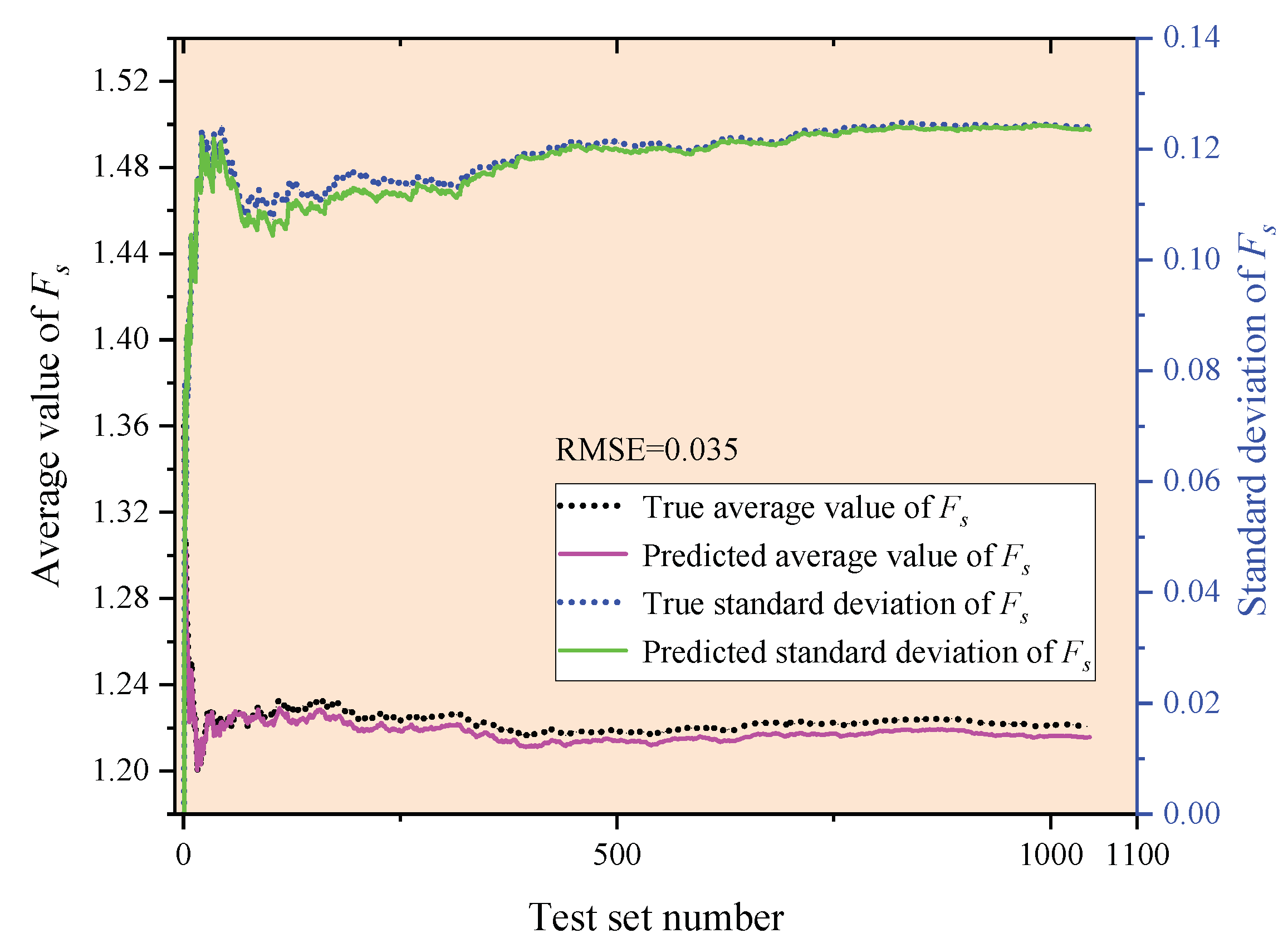
- The proposed surrogate model demonstrates excellent performance in predicting Fs, with predicted values closely matching the ground truth. The model achieves an RMSE of just 0.035, indicating its capability to reliably replace complex numerical simulations for efficient evaluation of slope stability under spatial variability.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| MNMM | Meshfree numerical manifold method |
| Probability density function | |
| COV | Coefficients of variation |
| FEM | Finite element method |
| RMSE | Root mean square error |
| GRF | Gaussian random field |
| SRM | Strength reduction method |
| MCS | Monte Carlo simulations |
| CNN | Convolutional neural network |
| Fs | Factor of safety |
| ReLU | Rectified linear unit |
References
- Jiang, S.; Huang, J.; Griffiths, D.V.; Deng, Z. Advances in reliability and risk analyses of slopes in spatially variable soils: A state-of-the-art review. Comput. Geotech. 2022, 141, 104498. [Google Scholar] [CrossRef]
- El-Ramly, H.; Morgenstern, N.R.; Cruden, D.M. Probabilistic slope stability analysis for practice. Can. Geotech. J. 2002, 39, 665–683. [Google Scholar] [CrossRef]
- Phoon, K.K.; Kulhawy, F.H. Characterization of geotechnical variability. Can. Geotech. J. 1999, 36, 612–624. [Google Scholar] [CrossRef]
- Baecher, G.B.; Christian, J.T. Reliability and Statistics in Geotechnical Engineering; John Wiley and Sons: New York, NY, USA, 2003. [Google Scholar]
- Bourne-Webb, P.J. Book review: Risk assessment in geotechnical engineering. Geotechnique 2011, 61, 186. [Google Scholar] [CrossRef]
- Cho, S.E. Effects of spatial variability of soil properties on slope stability. Eng. Geol. 2007, 92, 97–109. [Google Scholar] [CrossRef]
- Cho, S.E. Probabilistic stability analysis of rainfall-induced landslides considering spatial variability of permeability. Eng. Geol. 2014, 171, 11–20. [Google Scholar] [CrossRef]
- Wang, L.; Wu, C.Z.; Li, Y.Q.; Liu, H.L.; Zhang, W.G.; Chen, X. Probabilistic Risk Assessment of unsaturated Slope Failure Considering Spatial Variability of Hydraulic Parameters. KSCE J. Civ. Eng. 2019, 23, 5032–5040. [Google Scholar] [CrossRef]
- Zienkiewicz, O.C.; Humpheson, C.; Lewis, R.W. Associated and non-associated visco-plasticity and plasticity in soil mechanics. Geotechnique 1975, 25, 671–689. [Google Scholar] [CrossRef]
- Zheng, H.; Liu, D.F.; Li, C.G. Slope stability analysis based on elasto-plastic finite element method. Int. J. Numer. Methods Eng. 2005, 64, 1871–1888. [Google Scholar] [CrossRef]
- Ugai, K. A Method of Calculation of Total Safety Factor of Slope by Elasto-Plastic FEM. Soils Found. 1989, 29, 190–195. [Google Scholar] [CrossRef]
- Matsui, T.; San, K. Finite Element Slope Stability Analysis by Shear Strength Reduction Technique. Soils Found. 1992, 32, 59–70. [Google Scholar] [CrossRef]
- Griffiths, D.V.; Lane, P.A. Slope stability analysis by finite elements. Geotechnique 1999, 49, 387–403. [Google Scholar] [CrossRef]
- Stead, D.; Eberhardt, E.; Coggan, J.S. Developments in the characterization of complex rock slope deformation and failure using numerical modelling techniques. Eng. Geol. 2006, 83, 217–235. [Google Scholar] [CrossRef]
- Gravanis, E.; Pantelidis, L.; Griffiths, D.V. An analytical solution in probabilistic rock slope stability assessment based on random fields. Int. J. Rock Mech. Min. Sci. 2014, 71, 19–24. [Google Scholar] [CrossRef]
- Schweiger, H.F.; Peschl, G.M. Reliability analysis in geotechnics with the random set finite element method. Comput. Geotech. 2005, 32, 422–435. [Google Scholar] [CrossRef]
- Wu, C.; Wang, Z.Z.; Goh, S.H.; Zhang, W. Comparing 2D and 3D slope stability in spatially variable soils using random finite-element method. Comput. Geotech. 2024, 170, 106324. [Google Scholar] [CrossRef]
- Su, Y.; Luo, Z.; Zhang, P. Active searching algorithm for slope stability reliability based on Kriging model. Chin. J. Geotech. Eng. 2013, 35, 1863–1869. [Google Scholar]
- Zhang, T.; Zeng, P.; Li, T. System reliability analyses of slopes based on active-learning radial basis function. Rock Soil Mech. 2020, 41, 3098–3108. [Google Scholar]
- Karniadakis, G.E.; Kevrekidis, I.G.; Lu, L.; Perdikaris, P.; Wang, S.; Yang, L. Physics-informed machine learning. Nat. Rev. Phys. 2021, 3, 422–440. [Google Scholar] [CrossRef]
- Hu, H.; Qi, L.; Chao, X. Physics-informed neural networks (pinn) for computational solid mechanics: Numerical frameworks and applications. Thin-Walled Struct. 2024, 205, 112495. [Google Scholar] [CrossRef]
- Griffiths, D.V.; Fenton, G.A. Probabilistic slope stability analysis by finite elements. J. Geotech. Geoenvironmental Eng. 2004, 130, 507–518. [Google Scholar] [CrossRef]
- Huang, J.S.; Griffiths, D.V.; Fenton, G.A. System Reliability of Slopes by RFEM. Soils Found. 2010, 50, 343–353. [Google Scholar] [CrossRef]
- Li, D.Q.; Jiang, S.H.; Cao, Z.J.; Zhou, W.; Zhou, C.B.; Zhang, L.M. A multiple response-surface method for slope reliability analysis considering spatial variability of soil properties. Eng. Geol. 2015, 187, 60–72. [Google Scholar] [CrossRef]
- Phoon, K. Role of reliability calculations in geotechnical design. Georisk Assess. Manag. Risk Eng. Syst. Geohazards 2017, 11, 4–21. [Google Scholar] [CrossRef]
- Wang, Z.Z.; Goh, S.H. Novel approach to efficient slope reliability analysis in spatially variable soils. Eng. Geol. 2021, 281, 105989. [Google Scholar] [CrossRef]
- Griffiths, D.V.; Huang, J.S.; Fenton, G.A. Influence of Spatial Variability on Slope Reliability Using 2-D Random Fields. J. Geotech. Geoenvironmental Eng. 2009, 135, 1367–1378. [Google Scholar] [CrossRef]
- Ditlevsen, O.; Madsen, H.O. Structural Reliability Methods; Technical University of Denmark: Lyngby, Denmark, 1996. [Google Scholar]
- Lyu, H.; Yin, Z.; Hicher, P.; Laouafa, F. Incorporating mitigation strategies in machine learning for landslide susceptibility prediction. Geosci. Front. 2024, 15, 101869. [Google Scholar] [CrossRef]
- Lyu, S.; Wang, L.; Zhou, Z. Improving generalization of deep neural networks by leveraging margin distribution. Neural Netw. 2022, 151, 48–60. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, F. An implicit thermo-mechanical coupling model for heat conduction and thermal cracking in brittle materials. Comput. Geotech. 2024, 166, 106033. [Google Scholar] [CrossRef]
- Guo, H.; Yin, Z.Y. A novel physics-informed deep learning strategy with local time-updating discrete scheme for multi-dimensional forward and inverse consolidation problems. Comput. Methods Appl. Mech. Eng. 2024, 421, 116819. [Google Scholar] [CrossRef]
- Li, K.; Yin, Z.; Zhang, N.; Li, J. A PINN-based modelling approach for hydromechanical behaviour of unsaturated expansive soils. Comput. Geotech. 2024, 169, 106174. [Google Scholar] [CrossRef]
- Cheng, Y.M.; Lansivaara, T.; Wei, W.B. Two-dimensional slope stability analysis by limit equilibrium and strength reduction methods. Comput. Geotech. 2007, 34, 137–150. [Google Scholar] [CrossRef]
- Chen, F.Y.; Wang, L.; Zhang, W.G. Reliability assessment on stability of tunnelling perpendicularly beneath an existing tunnel considering spatial variabilities of rock mass properties. Tunn. Undergr. Space Technol. 2019, 88, 276–289. [Google Scholar] [CrossRef]
- Zheng, Y.; Chen, C.; Liu, T.; Xia, K.; Sun, C.; Chen, L. Analysis of a retrogressive landslide with double sliding surfaces: A case study. Environ. Earth Sci. 2020, 79, 21. [Google Scholar] [CrossRef]
- Zheng, H.; Liu, F.; Li, C. The MLS-based numerical manifold method with applications to crack analysis. Int. J. Fract. 2014, 190, 147–166. [Google Scholar] [CrossRef]
- Cao, X.; Lin, S.; Liang, Z.; Guo, H.; Zheng, H. Meshless numerical manifold method with novel subspace tracking and CSS locating techniques for slope stability analysis. Comput. Geotech. 2024, 166, 106025. [Google Scholar] [CrossRef]
- Cherubini, C. Data and Consideration on the Variability of Geotechnical Properties of Soils. In Proceedings of the International Conference on Safety and Reliability, ESREL 1997, Lisbon, Portugal, 17–20 June 1997; pp. 1583–1591. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Parameters | Mean | Coefficient of Variation | Distribution | Cross-Correlation Coefficient |
|---|---|---|---|---|
| c | 10 kPa | 0.3 | Logarithmic | −0.5 |
| φ | 30° | 0.2 | Logarithmic |
| Hyperparameters | Optimization Interval | Default Value | Optimal Hyperparameters |
|---|---|---|---|
| Initialize learning rate | [0.0001, 0.01] | 0.001 | 4.15 × 10−4 |
| Regularization coefficient | [1 × 10−8, 1 × 10−2] | 0.0001 | 6.73 × 10−6 |
| Dropout rate | [0.2, 0.6] | 0.5 | 0.315 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, X.; Lin, S.; Dong, M.; Hu, Q.; Zheng, H. A Surrogate Model for the Rapid Prediction of Factor of Safety in Slopes with Spatial Variability. Mathematics 2025, 13, 1604. https://doi.org/10.3390/math13101604
Cao X, Lin S, Dong M, Hu Q, Zheng H. A Surrogate Model for the Rapid Prediction of Factor of Safety in Slopes with Spatial Variability. Mathematics. 2025; 13(10):1604. https://doi.org/10.3390/math13101604
Chicago/Turabian StyleCao, Xitailang, Shan Lin, Miao Dong, Quanke Hu, and Hong Zheng. 2025. "A Surrogate Model for the Rapid Prediction of Factor of Safety in Slopes with Spatial Variability" Mathematics 13, no. 10: 1604. https://doi.org/10.3390/math13101604
APA StyleCao, X., Lin, S., Dong, M., Hu, Q., & Zheng, H. (2025). A Surrogate Model for the Rapid Prediction of Factor of Safety in Slopes with Spatial Variability. Mathematics, 13(10), 1604. https://doi.org/10.3390/math13101604