3.1. Problem Description
The transportation of liquid cargo via inland waterways represents a critical component of many countries’ freight systems, offering cost-effective and environmentally friendly alternatives to road and rail transport. However, this mode of transportation faces unique operational challenges, particularly when ships must transport different types of liquid cargo consecutively. One of the most significant challenges is the need for thorough tank cleaning between shipments to prevent cross-contamination, especially when transitioning from lower-quality to higher-quality products. Specifically, if a ship transports regular kerosene and then needs to transport premium kerosene, tank cleaning is required to prevent contamination of the higher-quality cargo. However, if a ship transports premium kerosene first and then regular kerosene afterward, cleaning may not be necessary since the lower-quality cargo won’t be affected by residue from the premium cargo. These cleaning requirements create the need for appropriately located tank cleaning stations throughout the inland waterway network.
The strategic placement of tank cleaning stations presents a significant optimization challenge due to several competing factors. Constructing these stations requires substantial investment and incurs ongoing operational costs for maintenance, staffing, and utilities. Meanwhile, ships requiring cleaning services often need to deviate from their optimal routes to reach these tank cleaning stations, resulting in additional fuel consumption. This detour problem becomes particularly critical in extensive waterway networks where poorly positioned cleaning stations can lead to considerable inefficiencies. For this study, we assume that tank cleaning is required after each transportation task, with consecutive shipments that do not require cleaning between them being modeled as a single transportation task. This approach allows us to focus on the critical cleaning operations while maintaining model tractability. In light of these considerations, it is crucial to precisely determine the optimal timing, location, and quantity of tank cleaning station constructions to minimize total system costs while guaranteeing sufficient cleaning capacity is available at the necessary times and locations across the network.
Consider the tank cleaning station location problem within an inland waterway transportation network during a multi-year planning horizon. The set of years in the planning horizon is denoted by (indexed by ). The river network consists of various ports where ships load and unload liquid cargoes. The set of ports is denoted by (indexed by ). The shipping distance between two ports and is represented by . Tank cleaning stations can be constructed at the locations of these ports in to service ships between transportation tasks. Without ambiguity, we use “port” and “location” interchangeably in the sequel.
A set (indexed by ) of ships transporting liquid cargoes require tank cleaning services at ports along the river. We denote the set of ships by (indexed by ). Each ship undertakes transportation tasks in the -th year, where (indexed by ) represents the set of tasks after which tank cleaning is required, and task is the last task after which tank cleaning is not needed in the plan. For each ship , the last task in each year does not require tank cleaning, as there is no subsequent task. At the end of each year or the beginning of the next, vessels typically undergo scheduled maintenance and inspection, which includes necessary tank cleaning. Since this maintenance is not related to the inter-task detour optimization addressed in this study, it is beyond the scope of our study. For each transportation task of ship in the -th year, there is an origin port and a destination port . After a ship completes a transportation task, it needs to visit a tank cleaning station if it needs to carry more expensive liquid cargoes at the next port. If a detour is required, we define the detour distance as , which is calculated as the sum of the distance from the current task’s destination to the cleaning station at location , plus the distance from the cleaning station to the next task’s origin port , minus the direct distance from to , i.e., . The detour cost when ship visits the tank cleaning station at location after the -th transportation task in the -th year is represented by .
Constructing tank cleaning stations requires substantial investment, represented by the construction cost for building a tank cleaning station at location in the -th year. Additionally, once constructed, each station incurs annual cost , which denotes the operational cost of a tank cleaning station at location in the -th year, including labor expenses, utilities (such as electricity and water), waste disposal for hazardous residues, and routine maintenance of mechanical and environmental systems. Each candidate tank cleaning station at location has a cleaning capacity parameter , which represents the maximum number of ships that the station can serve annually. Each location is assigned a maximum number of tank cleaning stations that can be constructed due to resource and space limitations. All tank cleaning stations at the same location are considered homogeneous, meaning they have the same construction cost, operational cost, and cleaning capacity in the same year. This assumption simplifies the modeling process by reducing dimensional complexity. However, the model still captures inter-location heterogeneity by allowing these parameters to vary across different ports and years. Moreover, the framework can be extended to accommodate intra-location heterogeneity by introducing type-specific indices for construction and capacity variables, enabling the differentiation of stations with distinct technologies, service levels, or environmental compliance standards within the same location. Under this extension, the integer variable is no longer sufficient. Instead, a set of binary variables is introduced to indicate whether the k-th tank cleaning station at location is constructed in the -th year, allowing the model to explicitly represent intra-location heterogeneity.
The construction of tank cleaning stations is subject to an annual budget constraint , which limits the total construction expenditure each year. Any unused budget from the previous year is carried forward to the next year. This allows for strategic planning of construction timing to optimize resource utilization while ensuring adequate cleaning capacity is available when needed.
The objective function of this study is to minimize the total cost in the planning horizon, including the construction cost of tank cleaning stations, the operating cost of tank cleaning stations, and the detour cost for ships to visit cleaning stations. To this end, we need to decide how many tank cleaning stations to construct at each candidate location each year. The primary decision variable is denoted as , which represents the number of tank cleaning stations constructed at location in the -th year. The assignment of ships to tank cleaning stations is represented by the binary decision variable , which equals 1 if ship goes to the tank cleaning station at location after the -th transportation task in the -th year, and 0 otherwise. The remaining budget at the end of the -th year is represented by the continuous decision variable .
While the current model assumes deterministic parameters and uninterrupted facility operations, it can be extended to account for real-world uncertainties such as port closures or equipment failure. In particular, the assignment variables can be adapted in future extensions to account for the dynamic availability of facilities under uncertain conditions. In such cases, can be set to 0 to represent that ship cannot visit the tank cleaning station at location after the -th transportation task in the -th year.
3.2. Model Formulation
In this subsection, we develop an MIP model according to the problem setting. The model effectively captures the multi-period planning decisions required for the construction of tank cleaning stations across a network of ports. It focuses on strategic decisions for constructing tank cleaning stations and operational decisions on which stations ships should visit for cleaning during cargo transitions. This comprehensive framework aims to minimize the total system costs while adhering to practical constraints such as budget limitations, capacity requirements, and location-specific restrictions.
Table 2 summarizes the notations used in the model.
The MIP model is developed to optimize the construction of tank cleaning stations and the assignment of ships to these stations, which can be written as follows:
The objective function (1) minimizes the total cost, which consists of three components: the construction cost of tank cleaning stations, the operating cost of tank cleaning stations, and the detour cost for ships to visit cleaning stations. Constraints (2) mean that for each transportation task requiring cleaning, a ship must select exactly one location for tank cleaning. Constraints (3) denote that the total cleaning capacity of all constructed stations at a location must be sufficient to handle the cleaning demand assigned to that location. Constraints (4) require that the total number of tank cleaning stations constructed at each location cannot exceed the maximum allowed number. Constraints (5) and (6) represent the budget requirements, where the remaining budget in each year equals the new budget allocation plus any remaining budget from the previous year minus the construction costs in the current year, and the remaining budget must be non-negative. Constraints (7)–(9) are the decision variable constraints. Constraints (7) ensure that the variable takes an integer value representing the number of stations built at location in the -th year. This value is bounded between 0 and the location-specific maximum , reflecting the practical requirement that stations must be constructed in whole, indivisible units and respecting site limitations.
Figure 1 illustrates the annual decision-making flow of our MIP model.
3.3. Model Analysis
In this section, we introduce some critical properties regarding the MIP model presented in
Section 3.2.
3.3.1. Integrality Necessity of Integer Variables
To ensure that the model solutions can be meaningfully implemented in real-world planning, it is essential to verify whether the variables denoting the number of tank cleaning stations constructed at each port in each year must be restricted to integer values. Relaxing these variables could potentially improve computational efficiency but may result in solutions that are infeasible in practice. Therefore, to improve the solving efficiency of the MIP model, we first investigate whether the integer variables can be relaxed. However, through meticulous analysis, we establish Theorem 1.
Theorem 1. The integer variables cannot be relaxed to continuous ones, as non-integer solutions will emerge and violate practical feasibility.
Proof. We demonstrate this via a synthetic counterexample. Assume there are two ports, i.e., . The maximum number of tank cleaning stations that can be constructed at each port is set as , and the cleaning capacity of each candidate tank cleaning station is . We consider a scenario with one ship () and a one-year planning horizon (), where the construction and operation costs are identical for both ports: , . The budget is set as . There is only one transportation task from to which needs tank cleaning after this task. The origin port of the last task after which tank cleaning is not needed in the plan is . Then, for the original model, there will be three possible tank station construction strategies: (1) Constructing no stations. This solution is infeasible, as the ship’s cleaning demand remains unmet. (2) Constructing a tank cleaning station at port , i.e., . Since the ship finishes its task at , visiting a tank cleaning station there avoids detours, which have no detour costs. And the objective value in this case is . (3) Constructing a tank cleaning station at port . In this case, the ship will conduct cleaning task at , which induces a detour calculated as , resulting in additional detour costs and thus increasing the objective function value to . We can conclude that the station construction decision (2) is optimal. However, if we relax the integer variables to continuous ones, will also be feasible as also satisfies the cleaning demand. The objective function value then can be calculated as . This relaxed LP solution yields a smaller objective value compared to that with the integer solution within the relaxation framework. Critically, is practically invalid as we cannot build a station by half. Hence, LP relaxation of inherently produces non-integer solutions conflicting with the real-world integer construction requirement, proving cannot be freely relaxed. □
3.3.2. Totally Unimodular Property of the Coefficient Matrix of Variables
Efficiently solving large-scale optimization models often depends on the ability to relax binary or integer variables without sacrificing solution accuracy. In the context of our model, understanding the structure of the constraints related to the assignment of ships to cleaning stations is crucial. By analyzing the underlying mathematical properties of the corresponding coefficient matrix, we can identify conditions under which certain variables may be relaxed, thereby improving computational tractability while preserving solution validity.
In this section, we explore the properties of variables
. The TU property [
15] of a matrix is an essential concept in the field of optimization, particularly within the realms of linear programming (LP) and combinatorial optimization. A matrix is said to be totally unimodular if every square submatrix of it has a determinant of 0, 1, or
. This attribute ensures that if the right-hand side of a linear system composed of such a matrix are integers, then every basic feasible solution of the problem will also be integers.
The TU property is crucial when dealing with integer linear programming (ILP) problems, as it allows for the relaxation of integer constraints without the loss of optimality in the solutions, significantly simplifying computational efforts. In practical terms, this means that the ILP that would typically require complex and computationally expensive techniques can instead be solved more efficiently using simpler LP methods. This relaxation is particularly useful because solving an LP is polynomially bounded in time complexity, whereas solving an ILP is NP-hard in general. This advantage makes the TU property highly desirable in various applications, such as network flow problems, scheduling, and resource allocation, where the matrices involved (like incidence matrices of bipartite graphs) often exhibit this property.
We give the following theorem regarding the coefficient matrix of variables
Theorem 2. The coefficient matrix of the variables
is TU.
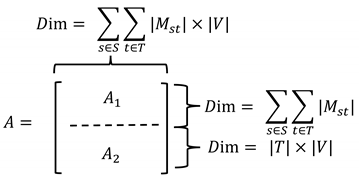
Proof. For ease of explanation, we denote
as the coefficient matrix of variables
, which includes
associating with constraints (2) and
associating with constraints (3). The structure of
can be presented as follows:
![Mathematics 13 01598 i001]()
Firstly, according to [
15], a sufficient condition for a matrix
to be TU is: row indices of matrix
can be partitioned into two sets such that the following four conditions are all satisfied: (i) each entry
of
satisfies
; (ii) each column of
contains at most two non-zero entries; (iii) if a column has two entries of the same sign, their row indices are in different sets; and (iv) if a column has two entries of different signs, their row indices are in the same set.
For our matrix , we consider dividing it naturally into two sets and . For and , each column contains only one 1, respectively. This implies that there are no more than two nonzero entries per column in the matrix . Therefore, conditions (i)–(ii) are satisfied immediately. Then, we can partition all rows of into a set and that of into another, meeting the criteria (iii) and (iv). Thus, we conclude that matrix is TU. □
The primary benefit of this TU property lies in its ability to relax integer variables to continuous ones without changing the integer nature of the optimal solutions, thus reducing the computational time of the MIP model. Specifically, given any fixed integer variables and integer parameters the right-hand side of the constraints (3) are always integers. Considering that the coefficient matrix of is TU and the right-hand side of constraints (2) and (3) are integers, the binary variables can be relaxed to continuous variables.
3.3.3. Submodular Property of the Objective Function
For effective and cost-efficient decision-making in infrastructure planning, it is important to understand how the objective function behaves as more tank cleaning stations are built. Specifically, uncovering whether the model exhibits diminishing returns with additional facilities provides valuable guidance for resource allocation and investment decisions. To this end, we investigate the mathematical structure of the objective function to reveal any inherent properties that could impact strategic planning.
A set function
defined on the subsets of a finite set
is called submodular if it satisfies the diminishing returns property: for every
and every
, it holds that
[
41]. In simple terms, a submodular function is a set function that describes the relationship between a set of inputs and an output, where adding more of one input has a decreasing additional benefit (diminishing returns). This property essentially means that the marginal gain from adding an element to a smaller set is at least as great as the gain from adding the same element to a larger set. Submodular functions are particularly interesting because they help model a variety of naturally occurring phenomena, such as economies of scale, network effects, or the spread of information in social networks.
For notation convenience, we denote and , which are restricted in the feasible region . Then, the objective function can be presented by a function of and , denoted by . We then give the following theorem about .
Theorem 3. The objective function is submodular regarding variables .
Proof. Assuming that the annual budgets
and the construction capacity
at each location
are large enough, we can model our problem as a variant of the multi-dimensional set covering problem. Here, the objective is to minimize the cost of selecting a subset of locations
to cover all required service elements
. The set covering function is known to be submodular [
41], which suggests that our objective function
is also submodular with respect to the variables
.
In the subsequent contents, we prove this submodularity by a more rigorous step-by-step analysis.
Step 1: The integer variables that indicates the number of tank cleaning stations constructed at location in the -th year can be equivalently transformed intro binary variables that indicate whether the k-th tank cleaning station is constructed at location in the -th year. Define and as two subsets of constructed tank cleaning stations and let , where each is 1. Then, for any , the marginal gain by adding another tank cleaning station to can be defined as . We note that the marginal gain is represented by since the objective function is the cost. Similarly, is the marginal gain by adding the same tank cleaning station.
Step 2: Since , any potential cost reduction in service coverage by adding to is also possible when added to , but may remain unchanged due to already covered demands with the same cost. Therefore, the marginal gain is by adding another tank cleaning station to the existing subsets of stations is greater than or equal to adding it to .
Step 3: If the annual budgets or construction capacities are not sufficient, the possibility of exceeding these constraints when adding to is higher than adding it to , potentially yielding zero additional gain.
Conclusively, we always have , which completes the proof. □









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}