1. Introduction
A boundary value problem (BVP) in ordinary differential equations (ODEs) consists of an ODE and a set of boundary conditions. BVPs are essential in mathematical modeling and analysis because they describe physical, biological, and engineering processes. These processes are characterized by specific conditions at the boundaries of the domain, which restrict the solution to a differential equation.
Boundary value problems for third-order differential equations find practical applications in numerous physical and engineering problems. For instance, they have been used to model the deflection of a curved beam [
1], fluid flow in draining or coating processes [
2,
3,
4], the behavior of a three-layer beam [
1], and free convection boundary layer flow near a vertical flat plate embedded in porous media [
5,
6].
While some BVPs can be solved to obtain exact solutions, complex problems often make it challenging or impossible to find them analytically. In such cases, numerical methods are employed to obtain approximate solutions. Various numerical methods have been applied to find the numerical solutions of third-order BVPs, including the shooting method [
7,
8], spline method [
9,
10], Adomian decomposition method [
11,
12], variational iteration method [
13,
14], and fixed-point iteration method [
15,
16,
17,
18]. However, it is the fixed-point iteration method based on Green’s functions that has been shown in several studies to provide highly accurate approximations of the solutions [
15,
16,
17,
18]. In addition, these studies established the existence and uniqueness of the theorems for the solutions.
Consider two non-empty subsets,
A and
B, within a metric space
. Let
T be a mapping from
A to
It is clear that the fixed-point equation
might not always have a solution. Actually, when
A and
B are disjoint, there is no solution. While exact solutions are desirable, the complexity of the problem necessitates the exploration of approximate solutions. Specifically, we aim to find points
x in
A that minimize the distance between
x and its image
. These points of minimal distance are known as the best proximity points of
T. A point
x in
A that satisfies the formula
, where
is the distance between
A and
B, is formally a best proximity point of
T. Note that when
T is a self-mapping, the best proximity point coincides with a fixed point of
T. Initially introduced by Fan [
19], best proximity point theory has been extensively developed and generalized (see, e.g., [
20,
21,
22]).
The advent of metric spaces equipped with directed graphs, a potent instrument in fixed-point theory developed by Jachymski [
23], was a major breakthrough in this area. Subsequent research (see, e.g., [
24,
25,
26,
27]) has explored various graph-based conditions for fixed-point existence. In 2017, Klanarong and Suantai [
28] defined the concept of a
G-proximal generalized contraction in such spaces, significantly impacting best proximity point theory and inspiring further research (e.g., [
29,
30,
31]). More recently, Suebcharoen et al. [
32] successfully used auxiliary functions to establish fixed-point theorems within the framework of metric spaces with directed graphs, building on the use of these functions for fixed-point theorems in fractional differential equations (as shown by Karapınar et al. [
33]). Building upon recent developments in proximity and fixed-point theory, the present work seeks to contribute to the establishment of a more inclusive and flexible framework that relaxes traditional assumptions while maintaining the existence and uniqueness of best proximity points and fixed points. Motivated by the ongoing need for broader applicability and more accessible verification conditions, we introduce the notion of G-proximally connected contractions, a new class of graph-based contractions defined within metric spaces. This concept is intended to generalize several well-known contraction types, including p-proximal contractions [
34], G-proximal generalized contractions [
28], and Geraghty proximal contractions [
30], thereby providing a more unified perspective under significantly weaker assumptions. It is hoped that the proposed framework may simplify certain proof structures and offer a broader and more efficient approach to proximity and fixed-point results. Furthermore, the use of graph-theoretic techniques appears to offer a natural pathway for extending classical contraction principles, potentially suggesting new directions for further research. To demonstrate the potential applicability of the developed concepts, we consider BVPs associated with differential equations, where the combination of Green’s functions and iterative schemes is employed to approximate solutions. It is anticipated that the results obtained herein may offer both theoretical insights and practical tools for addressing complex BVPs, contributing modestly to the ongoing advancement of proximity theory, fixed-point theory, and numerical analysis for differential equations.
The paper is arranged as follows.
Section 2 introduces the notion and recalls the definition of
G-continuous and
G-proximal mappings.
Section 3 explores the new
G-proximally connected contraction and investigates the existence of best proximity points for this mapping. The fixed-point approach via
G-connected contraction is shown in
Section 4.
Section 5 is related to the application of the presented contraction to ordinary differential equations. The iterative method utilization based on the Green–Picard fixed-point method that satisfies the
G-connected contraction is derived. The validity of theoretical results is illustrated by some numerical tests in
Section 6. Appropriate third-order boundary value problems are assigned to study the influence of the iterative scheme. Finally, concluding remarks are reported in
Section 7.
2. Preliminaries
In graph theory, a directed graph G is defined as a pair where is a non-empty set of vertices (or nodes) and is a set of ordered pairs of vertices. Now, let X be a non-empty set. It is known that X is said to be endowed with a directed graph if
- (i)
;
- (ii)
For every vertex there exists a directed edge in ;
- (iii)
All elements in are distinct (i.e., there are no two identical edges in the graph).
Throughout this article, unless otherwise specified, we assume that
- (a)
is a metric space endowed with a directed graph ;
- (b)
X contains two non-empty closed subsets A and B.
Also, let denote the set of all points a in A such that for some b in B. Similarly, define as the set of all points b in B such that for some a in A. Here, denotes the usual infimum distance between the sets A and B, defined as
We now collect some definitions regarding self-mappings on
X that will be used and mentioned later. The concept of
G-continuity was introduced by [
23]. In the next section, we will introduce another version of this kind of continuity, which will be referred to as
-continuity.
Definition 1 ([
23])
. A mapping is said to be -continuous if for any , there exists a sequence with for each such that whenever The following definition forms the basis for our concept of G-proximal connectedness.
Definition 2 ([
28])
. A mapping is said to be -proximal iffor all As we will see, this lemma is useful for proving our main theorem when dealing with Cauchy sequences.
Lemma 1 ([
35])
. Let be a sequence in X with its subsequences and . Suppose there exists such that, for every , there exist integers and satisfying , where is the least integer for whichIf , then the sequences and converge to ε. 3. Main Results
In this section, we introduce the notion of G-proximally connected contractions and investigate the existence of best proximity points for these functions. We begin by introducing the necessary notations and definitions for our main theorem. For clarity, recall that denotes a metric space equipped with a directed graph , and that A and B are two non-empty closed subsets of X.
Definition 3. Let and defineA subset of X is said to be image-connected if whenever . Definition 4. A mapping is said to be -continuous if, for any , there exists a sequence with for each such that whenever
Definition 5. A mapping is said to be G-proximally connected if and imply that for all
In the case that , it is clear that each G-proximal mapping is a G-proximally connected mapping. We still do not know if G-proximality is always G-proximal connectedness. However, the converse is not true, as shown by an example below.
Example 1. The following setting is considered.
- (i)
Let be the Euclidean metric space equipped with the directed graph G where - (ii)
Set and .
- (iii)
Let be a mapping defined by and
Now, it is easy to see that Choose and , Suppose thatThen,It follows that and but Thus, T is not G-proximal. Observe that Furthermore, the following equalities hold:Consequently, and . Since we can conclude that . Therefore, T is G-proximally connected. We next introduce two useful notations that will be essential for the proof of the main theorem.
- (i)
Let
be the class of all auxiliary functions
satisfying
for all sequences
,
,
, and
in
X such that
and
are decreasing.
- (ii)
Let
, for all
, and define
Example 2. The following are examples of functions
- (1)
- (2)
for
- (3)
For a mapping
, define
We proceed to derive some properties of
that are straightforward to verify.
Remark 1.
- (1)
if and only if .
- (2)
For any sequences and in A such that and , if T is -continuous on A and , then .
The following key lemma will be used in the proof of our main result.
Lemma 2. Let be a G-proximally connected mapping. If is nonempty and , then there exists a sequence such that for all Moreover, if T is -continuous and in A, then
Proof. By assumption, there exists
. Since
, there exists
such that
. The
G-proximal connectedness of
T implies that
belongs to
. Since
, there exists
such that
. Likewise, by the
G-proximal connectedness of
T,
. Consequently, we have
By iterating this process, we can construct a sequence
such that
As a consequence,
Now, let
T be
-continuous and
in
A; from the property (
3), we have
. Take
in Equation (
2); thus,
. □
Before proceeding to our main result, we define a new class of contractions.
Definition 6. A mapping is called a -proximally connected contraction if the following conditions hold:
- (1)
T is G-proximally connected;
- (2)
For all , if , then there exists such that when .
With the necessary background established, we now present our main theorem.
Theorem 1. Let be a mapping satisfying the following conditions:
- (i)
T is a G-proximally connected contraction;
- (ii)
and ;
- (iii)
T is -continuous.
Then, . Moreover, the condition that for all implies the uniqueness of the best proximity point for T.
Proof. From the assumption
and Lemma 2, we can construct a sequence
such that
In other words,
Next, we want to show that
is a Cauchy sequence. However, we will first show that
If there exists
such that
, then from the property (
6), we have
It follows from Remark 1 that
, and this completes the proof.
Now, suppose that for all .
From the property (
6) and
T being a
G-proximally connected contraction,
where
Suppose for a contradiction that the sequence
is not decreasing. Then, there exists
such that
Therefore,
From the inequality (
7) and the above equation,
Since
Thus,
or
by the property of
This contradicts the fact that
for all
Consequently, the sequence
must be decreasing. Then,
Since
is decreasing,
It follows from Equation (
8) yields
Assume that
Taking
in the inequality (
7) and using Equation (
8), we obtain
By the definition of function
h,
It follows that
r must necessarily be equal to
Now, we are ready to show that
is a Cauchy sequence. Suppose for a contradiction that it is not. Then, there exists
, and subsequences
and
of
such that for all
with
By Lemma 1, we have
Then, from the property (
6),
It follows from
T being a
G-proximally connected contraction that
where
From Equations (
9) and (
11),
Taking
in the inequality (
13), we have that
Then,
, which is a contradiction. Therefore,
is a Cauchy sequence as claimed.
Since A is closed, converges to some in A. It follows from and the -continuity of T that By Lemma 2, we finally obtain that is the best proximity point of
Let
. Suppose that
From Definition 6 (ii), there exists a function
such that
Then, by the property of
h, we have
This implies that
, which is impossible because
This confirms the uniqueness of the best proximity point of
T. □
Example 3. The following setting is considered.
- (i)
Let be the Euclidean metric space equipped with the directed graph G where - (ii)
Set and .
- (iii)
Let be a mapping defined by
Clearly,
T is
-continuous and
. We begin by showing that T satisfies the condition of the
G-proximal connectedness. Let
and
Then,
and so
Now, let
It follows that
. Since
and
,
Then,
and thus
Thus,
, which implies that
. This confirms the
G-proximal connectedness of
T.
Next, we choose a function
defined by
Let
, where
satisfying
, that is,
It follows that
and
. Since
and
,
and
. To obtain the inequality (
15), the result is trivial if
or
. We assume that
and
. This implies that
, and
are all distinct. Consequently, we have the following calculation:
Therefore, T is a G-proximally connected contraction. By Theorem 1, , and is the best proximity point of
4. Fixed-Point Approach
In this section, we consider a special case of the main theorem by assuming that . In this particular case, we can derive the corresponding fixed-point result. Subsequently, in the following section, we shall demonstrate the applicability of this derived result within the contexts of integral equations and ordinary differential equations. Note that here, we have the following.
- (i)
The G-proximality is equivalent to the condition that T is edge-preserving, where a mapping T is said to be edge-preserving if, for all , we have .
- (ii)
The set is image-connected.
Observe that if T is edge-preserving, then is image-connected, but the converse implication does not hold.
Example 4. Let and be a mapping defined by Consider the edge set . It follows that and is image-connected. However, but This means that T is not edge-preserving.
The previous setting in
Section 2 can be reduced as follows:
Definition 7. A mapping T is said to be a -connected contraction if the following hold;
- (1)
is image-connected;
- (2)
For all , if there exists such that when
For a mapping , let be the set of all fixed points of As can be seen, in this particular case, . We now obtain the fixed-point result.
Corollary 1. Let T be a contraction G-connected with the -continuous. Then, 5. Differential Equation and Iterative Method Utilization
We now show an example of applying Corollary 1 to differential equations by converting the original BVP into an integral form with the aid of Green’s function, which provides the goal of the result to the differential equation. Examine the nonhomogeneous third-order differential problem
using
as a continuous function based on the boundary conditions
Take a look at the setup below to demonstrate how to apply our fixed-point discovery to differential equations.
- (i)
Let be a mapping such that there exists a function that is satisfied; if , then for all . Let be the family of functions satisfying this condition.
- (ii)
For
, define the graph
, where
is specified as
Lemma 3. For , the set is image-connected.
For a function
to be a solution to the problem (
17) with the conditions (
18), the following integral problem needs to be met:
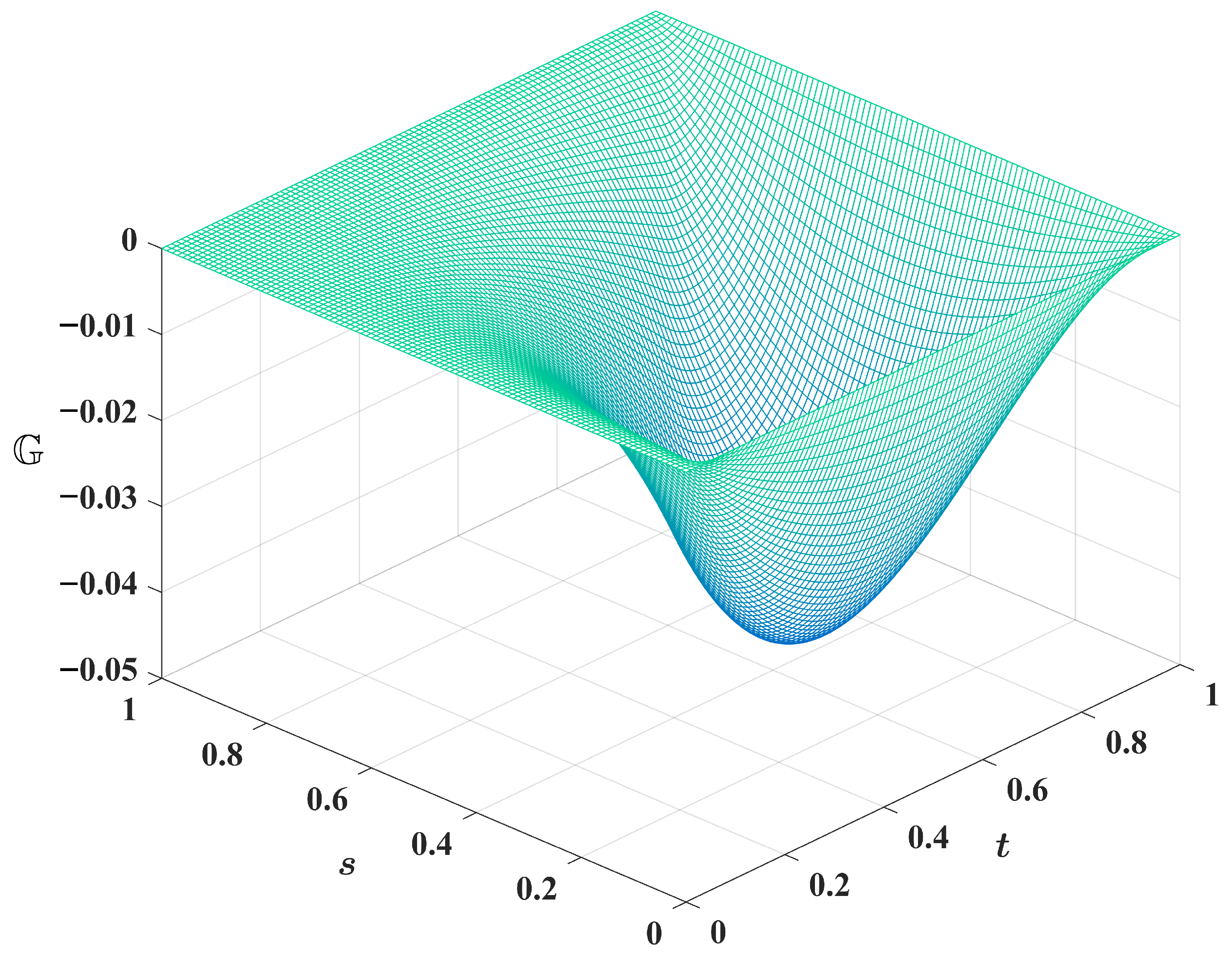
where Green’s function, denoted by
, is described as
Figure 1 shows the plot of the function (
20) that is involved in the integral issue (
19) where
and
. The operator
is now introduced and defined by the statement
Determining the fixed points of the operator
is therefore the same as resolving the differential equation’s boundary value issue. Stated differently, the process of solving the BVP can be reformulated as locating a fixed point of an operator that is appropriately described.
Lemma 4. Equation (20) states that the Green function meets the following inequalities:andfor . Proof. The integral of
should first be expressed as
Similarly, we obtain
Finally, the integral of
yields
This completes the proof. □
Theorem 2. Let and suppose there exists a function such that . The derivatives of the continuous function q with respect to u, , and are assumed to have boundaries of , , and , respectively. Letandwhere . According to these assumptions, has a fixed point in that a solution to the integral problem (21). Proof. Under these presumptions,
and the
-continuity, we have left to show that
is a
G-connected contraction. Suppose that
is
’s norm. The definition of
can be found in Equation (
21). First, observe that since
’s differentiability permits differentiation under the integral sign,
does, in fact, map into
. Therefore,
and
The calculation in Lemma 4 yields
Given that
,
, and
are constrained by
,
, and
, respectively, and the mean value theorem is used, we derive
Furthermore,
and
are provided by the results in Lemma 4. Likewise, by employing inequalities (
23) and (
24) and the examination of the quantity (
22), we arrive at
and
When the hypothesis of the theorem is combined with the left-hand side of inequalities that came before it, (
22), (
25) and (
26), we obtain
where
Therefore, is a G-connected contraction from the complete space, , to . As a result, the desired solution, u, is its fixed point. □
The problem (
17) with the conditions (
18), which are meant to be solved numerically, is now approached iteratively. The fundamental concept of the suggested plan is to use the well-known Picard fixed-point iterative technique. For this, an integral operator that is stated in terms of the Green’s function corresponding to the linear portion of the problem (
17) is meticulously defined. Start by defining the integral operator
When
is added and subtracted from within the integrand using the relation (
19), the outcome is
The operator
yields
when Green–Picard’s fixed-point iteration approximation is applied. Take into consideration the following unique situation:
in accordance with the circumstances
Subject to the Green’s function, the iterative scheme is expressed as
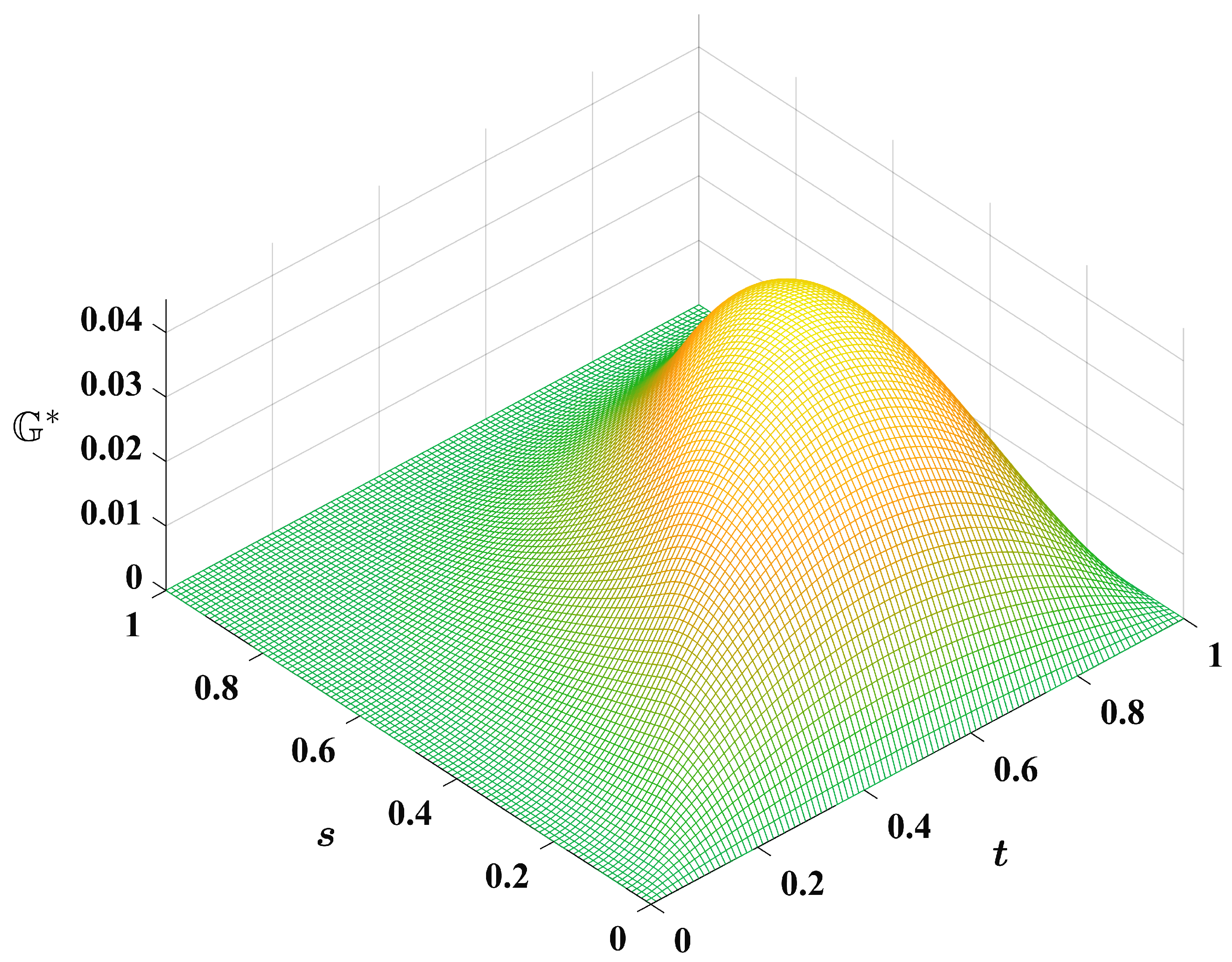
where
The plot of the function (
33) involved in the iterative scheme (
32) is given in
Figure 2.
To demonstrate the theorem, we will work within the function space
, which allows us to handle the second-order derivatives that appear in the differential equation. To measure the magnitude of functions within this space, we establish the norm
Theorem 3. Let and suppose there exists a function such that
. The derivatives of the continuous function q with respect to u, , and are assumed to have boundaries of , , and , respectively. LetandAccording to these assumptions, has a fixed point in that is a solution to the iterative (32). Proof.
is obtained by simplifying the iterative process (
32) and carrying out three integrations by parts on the integrand’s initial term, where
is the function provided in Equation (
33). The equivalent homogeneous requirements,
, are easily shown to be satisfied by
. The scheme (
35) reduces to
since
satisfies the boundaries
and
. The value of the function
presented in Equation (
33) indicates that
, which is evident from the previous computations. Given that
,
, and
are bounded by
,
, and
, respectively, and the mean value theorem is applied, we come to
Additionally, the assessments that follow are simple to complete:
and
Similarly, by employing inequalities (
36) and (
37) and the analysis, the quantity (
35) yields
and
After arranging, we obtain
by adding the hypothesis of the theorem to the left-hand side of the preceding inequalities that came before it, (
35), (
38) and (
39), where
Therefore,
is a
G-connected contraction from
to
. Therefore, it has the desired outcome. □
6. Numerical Examples
Two numerical examples of boundary value issues involving third-order nonlinear differential equations are given in this section. Example 5 considers equations of the form given in Equation (
30) with homogeneous boundary conditions specified in Equation (
31), while Example 6 examines equations of the form presented in Equation (
30) with non-homogeneous boundary conditions. These examples show the efficacy of the suggested iterative strategy and validate the theoretical findings produced. Both instances have known exact solutions. The following metrics are used to assess the accuracy of the present iterative approach:
- (1)
Absolute Error (AE):
The definition of the absolute error at any given point
t is
where the exact solution is
and the approximate solution
is derived using the suggested approach. This measure expresses how much the approximate and exact answers differ from one another.
- (2)
Mean Absolute Error (MAE):
The mean absolute error over
N evaluation points is given by
Numerical simulations are conducted in this study using MATLAB software (Version 2018a).
Example 5. Consider the third-order nonlinear differential equationwith the conditions of the boundaries The precise answer to this problem is
The following is the definition of the function
q:
From Equations (
32) and (
33), the iterative scheme for solving this example is formulated as
The initial approximation
, which satisfies the homogeneous problem
and the boundary requirements given in Equation (
44), is where we begin implementing the presented iterative technique.
Table 1 presents the maximum and mean absolute errors obtained using the iterative scheme described in Equation (
46) for iterations 1 through 5 of this BVP. The results demonstrate that both error measures converge to zero as the number of iterations increases. Additionally,
Table 2 compares the exact and approximate solutions obtained at iterations 1 through 5 for any point
x in the interval
, with a step size of 0.1.
Figure 3 shows the comparison of absolute errors at iterations 1 through 5. Additionally,
Figure 4 provides a graphical representation of both the exact and approximate solutions at iteration 5. It indicates that approximate solutions are closer to the exact solutions for every point as the number of iterations increases.
Example 6. Consider the third-order nonlinear differential equationwith the non-homogeneous boundary conditions The precise answer to this problem is
The definition of the function
q is as follows:
The following is the expression for the fixed-point iterative strategy used to estimate the solution of this example:
where the initial iterate
fulfilled the corresponding homogeneous problem
and the non-homogeneous boundary requirements (
48). Next, we apply the initial approximation, denoted as
; it is simple to observe that the specified initial function
satisfies the criteria of the homogeneous equation.
Table 3 summarizes the maximum and mean absolute errors computed using the proposed iterative scheme over three iterations for this BVP. The results indicate a consistent decrease in error measures as the number of iterations increases. The exact and approximate answers from iterations 1 through 3 are compared in detail in
Table 4. With a 0.1 step size, it concentrates on locations inside the range [0, 1].
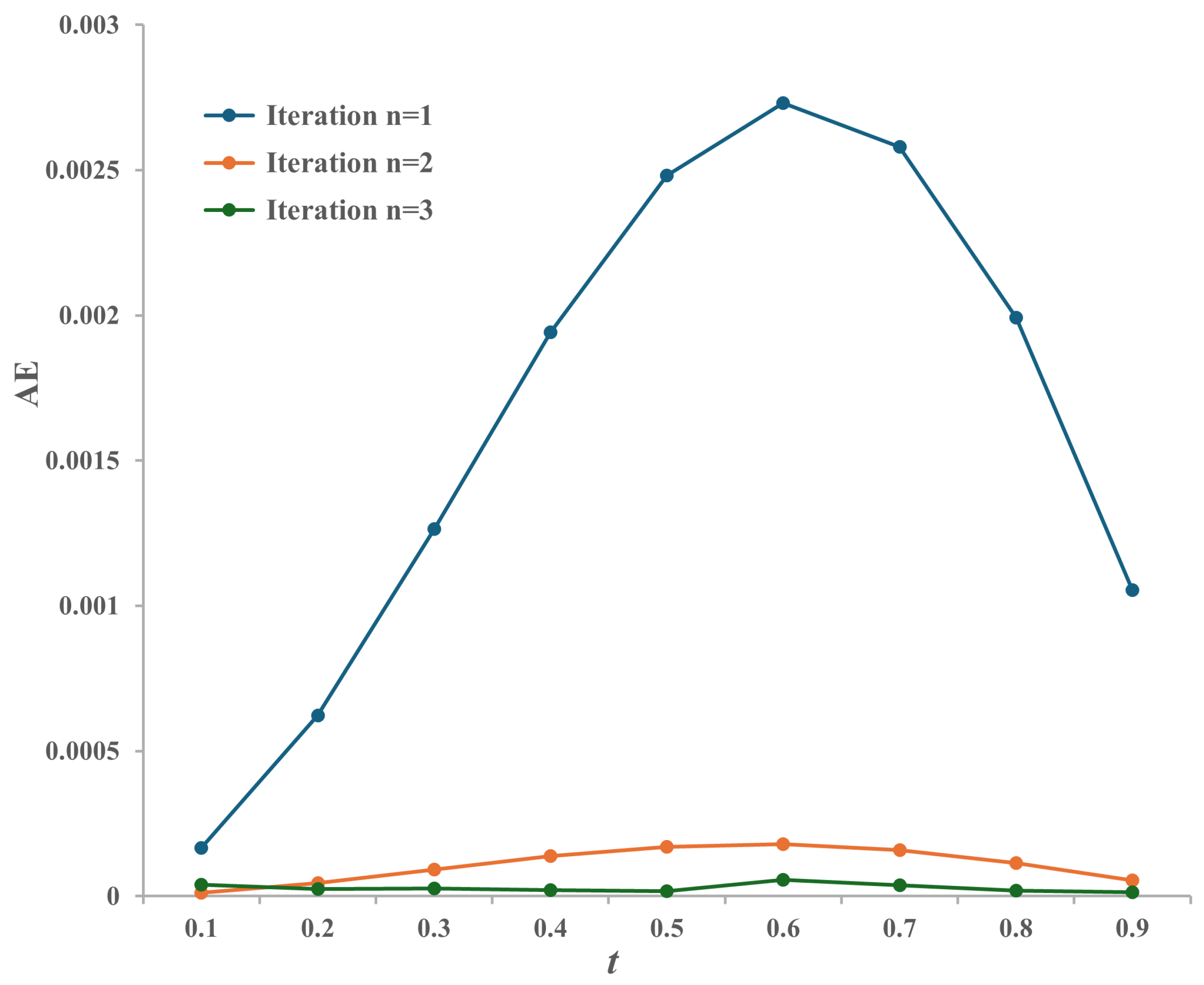
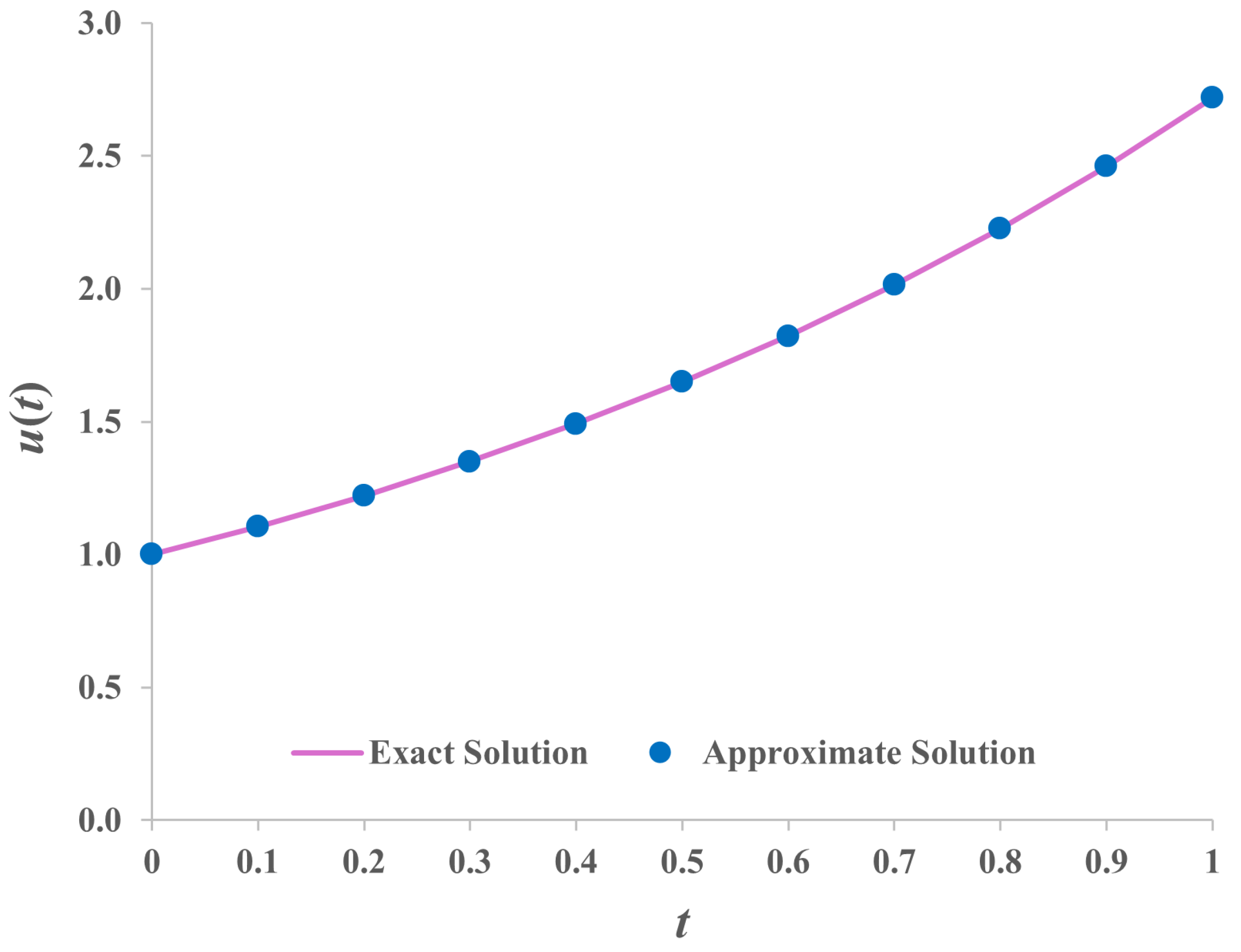
Figure 5 illustrates the absolute errors from iterations 1 to 3. Furthermore,
Figure 6 presents the comparison of the exact solution alongside the approximate solution at the iteration 3. The results show that as the iterations progress, the approximate solutions increasingly align with the exact solutions at each point.
The numerical results presented in
Table 1,
Table 2,
Table 3 and
Table 4 and illustrated in
Figure 3,
Figure 4,
Figure 5 and
Figure 6 provide strong support for the accuracy and convergence of the proposed method. Notably, both the maximum and mean absolute errors consistently decreased with each iteration, demonstrating the method’s reliable convergence behavior. A detailed comparison between the exact and approximate solutions across different iteration levels further confirms the method’s precision. This is particularly clear in
Figure 4 and
Figure 6, where the approximate solutions closely align with the exact ones by the third and fifth iterations, respectively. These findings suggest that the proposed approach offers a reliable and efficient tool for analyzing and computing solutions to third-order nonlinear differential equations, under both homogeneous and nonhomogeneous boundary conditions. Its strong convergence properties and ability to handle complex, real-world problems underscore its potential for broader application and further development.
7. Conclusions
In this paper, we presented a novel graph-based contraction in a metric space and explored its properties, including results on best proximity points and fixed points, which were indicated with examples. The theoretical framework and its practical applications were explained through a variety of illustrative cases that were presented alongside these results. The practical applicability of these results was displayed through concrete examples in the context of integral and ordinary differential problems. Moreover, we presented the use of an iterative technique, based on the Green–Picard fixed-point method, to solve a class of homogeneous boundary value problems that satisfy the purposed contractions. Finally, the iterative technique was applied to approximate the solution of a nonlinear third-order differential equation. In order to validate our findings, we carried out a series of numerical tests using various nonlinear third-order boundary value problems. The iterative method was demonstrated to be effective, producing accurate approximations of the solution. Given that G-proximally connected contractions extend many contractions in the literature, our results broaden these existing findings and the graph-based approach, which itself provides a generalization of other related results. Future research should investigate more expansive contexts, such as alternative spaces X and diverse classes of mappings.
Author Contributions
Conceptualization, K.P., S.M., T.C. and P.C.; Methodology, K.P., S.M., T.C. and P.C.; Writing—original draft, K.P., S.M., T.C. and P.C.; Writing—review & editing, K.P., S.M., T.C. and P.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Fundamental Fund 2025, Chiang Mai University.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding authors.
Acknowledgments
This research was supported by the following: (1) Fundamental Fund 2025 Chiang Mai University and (2) Chiang Mai University, Chiang Mai, Thailand.
Conflicts of Interest
The authors declare that they have no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| BVP | Boundary Value Problem |
| ODE | Ordinary Differential Equation |
| AE | Absolute Error |
| MAE | Mean Absolute Error |
References
- Greguš, M. Third Order Linear Differential Equations; Mathematics and Its Applications (East European Series); Reidel Publishing: Dordrecht, The Netherlands, 1987; Volume 22. [Google Scholar] [CrossRef]
- Troy, W.C. Solutions of third-order differential equations relevant to draining and coating flows. SIAM J. Math. Anal. 1993, 24, 155–171. [Google Scholar] [CrossRef]
- Bernis, F.; Peletier, L.A. Two problems from draining flows involving third-order right focal boundary value problems. SIAM J. Math. Anal. 1996, 27, 515–527. [Google Scholar] [CrossRef]
- Agarwal, R.P.; O’Regan, D. Singular problems on the infinite intervals modeling phenomena in draining flows. IMA J. Appl. Math. 2001, 66, 621–635. [Google Scholar] [CrossRef]
- Guo, J.S.; Tsai, J.C. The structure of solutions for a third order differential equation in boundary layer theory. Jpn. J. Ind. Appl. Math. 2005, 22, 311–351. [Google Scholar] [CrossRef]
- Tsai, J.C.; Wang, C.A. A note on similarity solutions for boundary layer flows with prescribed heat flux. Math. Methods Appl. Sci. 2007, 30, 1453–1466. [Google Scholar] [CrossRef]
- Oderinu, R.A.; Aregbesola, Y.A.S. Shooting method via Taylor series for solving two point boundary value problem on an infinite interval. Gen. Math. Notes 2014, 24, 74–83. [Google Scholar]
- Alzahrani, K.A.; Alzaid, N.A.; Bakodah, H.O.; Almazmumy, M.H. Computational Approach to Third-Order Nonlinear Boundary Value Problems via Efficient Decomposition Shooting Method. Axioms 2024, 13, 248. [Google Scholar] [CrossRef]
- Caglar, H.N.; Caglar, S.H.; Twizell, E.H. The numerical solution of third-order boundary-value problems with fourth-degree & B-spline functions. Int. J. Comput. Math. 1999, 71, 373–381. [Google Scholar]
- Pandey, P.K. Solving Third-Order Boundary Value Problems with Quartic Splines; SpringerPlus: Berlin/Heidelberg, Germany, 2016; Volume 5, pp. 1–10. [Google Scholar]
- Hasan, Y.Q. The numerical solution of third-order boundary value problems by the modified decomposition method. Adv. Intell. Transp. Syst. 2012, 1, 71–74. [Google Scholar]
- Ejaz, S.T.; Mustafa, G. A subdivision based iterative collocation algorithm for nonlinear third-order boundary value problems. Adv. Math. Phys. 2016, 2016, 5026504. [Google Scholar] [CrossRef]
- He, J.H. Variational iteration method for autonomous ordinary differential systems. Appl. Math. Comput. 2000, 114, 115–123. [Google Scholar] [CrossRef]
- Ahmed, J. Numerical solutions of third-order boundary value problems associated with draining and coating flows. Kyungpook Math. J. 2017, 57, 651–665. [Google Scholar]
- Abushammala, M.; Khuri, S.A.; Sayfy, A. A novel fixed point iteration method for the solution of third order boundary value problems. Appl. Math. Comput. 2015, 271, 131–141. [Google Scholar] [CrossRef]
- Smirnov, S. Green’s function and existence of solutions for a third-order three-point boundary value problem. Math. Model. Anal. 2019, 24, 171–178. [Google Scholar] [CrossRef]
- Akgun, F.A.; Rasulov, Z. A new iteration method for the solution of third-order BVP via Green’s function. Demonstr. Math. 2021, 54, 425–435. [Google Scholar] [CrossRef]
- Okeke, G.A.; Udo, A.V.; Rasulov, Z. A Novel Picard–Ishikawa–Green’s Iterative Scheme for Solving Third-Order Boundary Value Problems. Math. Methods Appl. Sci. 2024, 47, 7255–7269. [Google Scholar] [CrossRef]
- Fan, K. Extensions of Two Fixed Point Theorems of F.E. Browder. Math. Z. 1969, 122, 234–240. [Google Scholar] [CrossRef]
- Reich, S. Approximate Selections, Best Approximations, Fixed Points, and Invariant Sets. J. Math. Anal. Appl. 1978, 62, 104–113. [Google Scholar] [CrossRef]
- Basha, S.S.; Veeramani, P. Best Proximity Pair Theorems for Multifunctions with Open Fibres. J. Approx. Theory 2000, 103, 119–129. [Google Scholar] [CrossRef]
- Basha, S.S. Extensions of Banach’s Contraction Principle. Numer. Funct. Anal. Optim. 2010, 31, 569–576. [Google Scholar] [CrossRef]
- Jachymski, J. The Contraction Principle for Mappings on a Metric Space with a Graph. Proc. Am. Math. Soc. 2008, 136, 1359–1373. [Google Scholar] [CrossRef]
- Wongsaijai, B.; Charoensawan, P.; Suebcharoen, T.; Atiponrat, W. Common Fixed Point Theorems for Auxiliary Functions with Applications in Fractional Differential Equations. Adv. Differ. Equ. 2021, 2021, 503. [Google Scholar] [CrossRef]
- Reich, S.; Zaslavski, A.J. Contractive Mappings on Metric Spaces with Graphs. Mathematics 2021, 9, 2774. [Google Scholar] [CrossRef]
- Jiddah, J.A.; Alansari, M.; Mohammed, O.K.S.; Shagari, M.S.; Bakery, A.A. Fixed Point Results of a New Family of Contractions in Metric Space Endowed with a Graph. J. Math. 2023, 2023, 2534432. [Google Scholar] [CrossRef]
- Chaichana, K.; Poochinapan, K.; Suebcharoen, T.; Charoensawan, P. Applying Theorems on b-Metric Spaces to Differential and Integral Equations Through Connected-Image Contractions. Mathematics 2024, 12, 3955. [Google Scholar] [CrossRef]
- Klanarong, C.; Suantai, S. Best Proximity Point Theorems for G-Proximal Generalized Contractions in Complete Metric Spaces Endowed with Graphs. Thai J. Math. 2017, 15, 261–276. [Google Scholar]
- Chaobankoh, T.; Dangskula, S. Common Best Proximity Points of Some Graph-Theoretical Notions of Dominating Pairs. Results Nonlinear Anal. 2023, 6, 24–33. [Google Scholar]
- Sinsongkham, K.; Atiponrat, W. Best Proximity Coincidence Point Theorem for G-Proximal Generalized Geraghty Auxiliary Function in a Metric Space with Graph G. Thai J. Math. 2022, 20, 993–1002. [Google Scholar]
- Thangthong, C.; Charoensawan, P.; Dangskul, S.; Phudolsitthiphat, N. Common Best Proximity Point Theorems in JS-Metric Spaces Endowed with Graphs. J. Funct. Spaces 2021, 2021, 5524494. [Google Scholar] [CrossRef]
- Teeranush, S.; Watchareepan, A.; Khuanchanok, C. Fixed Point Theorems via Auxiliary Functions with Applications to Two-Term Fractional Differential Equations with Nonlocal Boundary Conditions. AIMS Math. 2023, 8, 7394–7418. [Google Scholar]
- Karapınar, E.; Abdeljawad, T.; Jarad, F. Applying New Fixed Point Theorems on Fractional and Ordinary Differential Equations. Adv. Differ. Equ. 2019, 2019, 421. [Google Scholar] [CrossRef]
- Altun, I.; Aslantas, M.; Sahin, H. Best Proximity Point Results for P-Proximal Contractions. Acta Math. Hung. 2020, 162, 393–402. [Google Scholar] [CrossRef]
- Atiponrat, W.; Khemphet, A.; Chaiwino, W.; Suebcharoen, T.; Charoensawan, P. Common Best Proximity Point Theorems for Generalized Dominating with Graphs and Applications in Differential Equations. Mathematics 2024, 12, 306. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}