
An Inertial Subgradient Extragradient Method for Efficiently Solving Fixed-Point and Equilibrium Problems in Infinite Families of Demimetric Mappings




Abstract
1. Introduction
- 1.
- Initialization: Start from any in the feasible set .
- 2.
- Iterative steps: Compute and usingwhere is a positive parameter, and is the norm in .
- 3.
- Stopping criterion: The process stops when , with as the solution to (1).
- (a)
- The proposed algorithm enhances the iterative process by incorporating inertial terms, which introduce momentum-like effects. The inclusion of these inertial components significantly accelerates the convergence rate of the iterative sequence.
- (b)
- The method employs a monotonic stepsize scheme, enabling dynamic adjustment of the stepsize throughout the iterative process. This adaptive stepsize strategy eliminates the need for prior knowledge of the Lipschitz constants of the bifunction, which are often difficult to determine in practical applications.
- (c)
- Our study demonstrates that the sequence generated by the method we propose exhibits strong convergence to the unified fixed points within the framework of demimetric mappings. These fixed points correspond to solutions of equilibrium problems associated with pseudomonotone operators, which play a crucial role in various mathematical models. The observed convergence to these common fixed points highlights the versatility and effectiveness of the algorithm in solving a broad class of equilibrium problems.
- (d)
- To evaluate the effectiveness of the proposed approach, we conduct a series of extensive numerical experiments. These experiments involve solving several instances of equilibrium and fixed-point problems using our algorithm and comparing its performance with other methods available in the literature. Through detailed numerical examples and a comparative analysis, we illustrate the superior performance and efficiency of our method in terms of convergence speed, accuracy, and robustness.
2. Preliminaries
- (i)
- (ii)
- (iii)
- (i)
- The normal cone at is
- (ii)
- The subdifferential of ϰ at is
- (i)
- Strongly monotone if
- (ii)
- Monotone if
- (iii)
- Strongly pseudomonotone if
- (iv)
- Pseudomonotone if
- (v)
- Lipschitz-type continuous if there exist constants such that
- (i)
- Nonexpansive if
- (ii)
- Quasi-nonexpansive if
- (iii)
- -Demicontractive if for ,
- (iv)
- -Demimetric if and for
- (i)
- ;
- (ii)
- is closed and convex;
- (iii)
- is quasi-nonexpansive from to .
3. Main Results
- (c1)
- The bifunction is pseudomonotone and Lipschitz continuous on .
- (c2)
- is an infinite family of -demimetric mappings, each demiclosed at zero, with . Let . Define , where , and conclude from Lemma 3 that Ψ is a σ-demimetric mapping. Define with .
- (c3)
- The sequence is positive and satisfies , with . Additionally, there exists such that , where , , and .
- (c4)
- The set is non-empty, i.e., .
| Algorithm 1 Inertial Hybrid Algorithm for Fixed-Point and Equilibrium Problems |
|
Application to Solve Variational Inequalities
4. Numerical Experiments
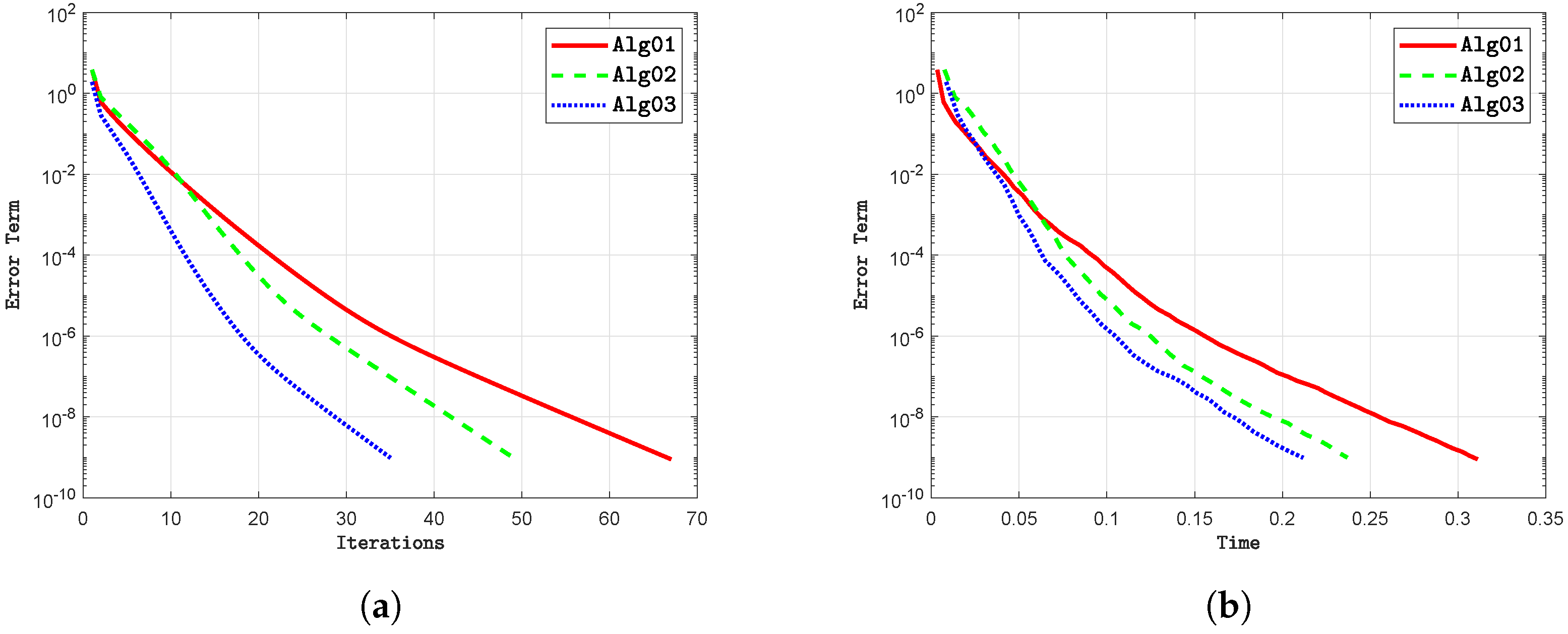
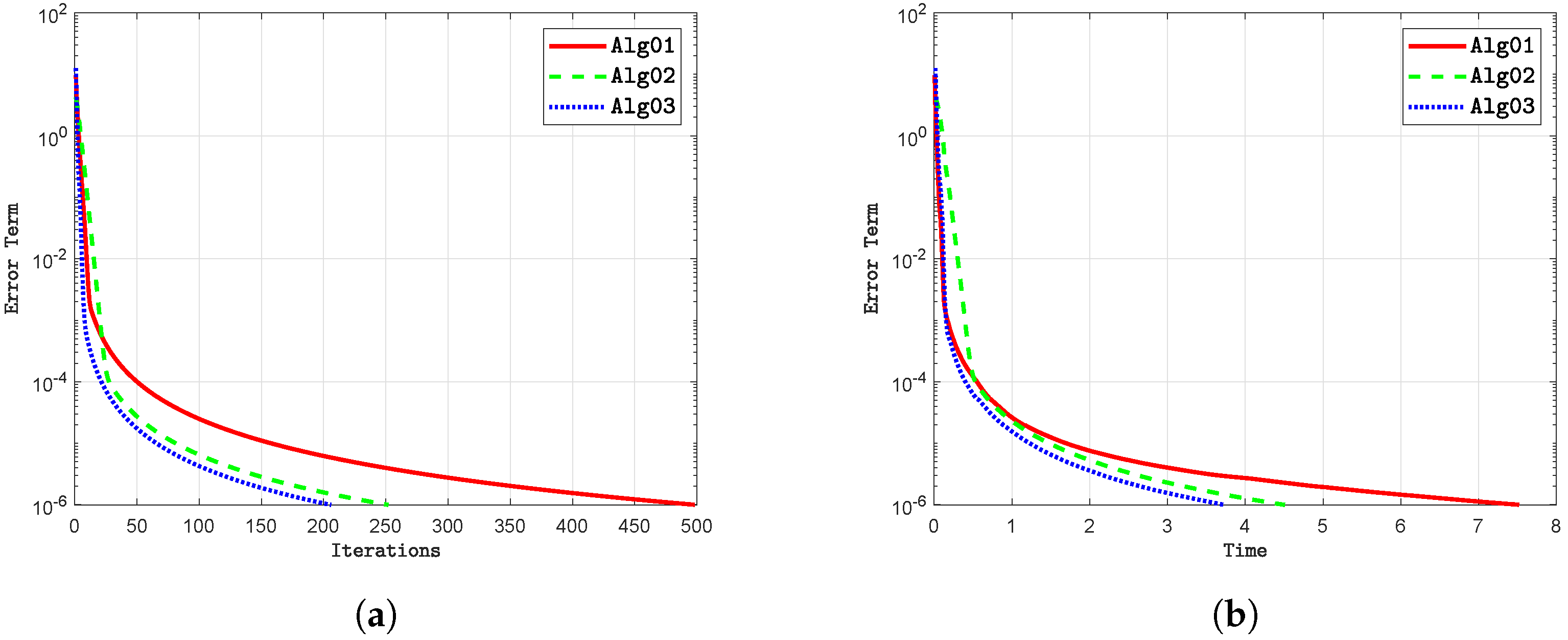
- i
- The variation in dimensions within a real Hilbert space has minimal impact on the iteration count across all algorithms. Our proposed algorithm consistently demonstrates a lower iteration count compared to alternative methods in all scenarios. Thus, the dimensionality of the Hilbert space appears to have a negligible influence on the iteration count, regardless of the algorithm employed.
- ii
- The execution time may vary slightly depending on the dimensions of the Hilbert space , even when the number of iterations remains constant. Generally, our proposed algorithm tends to complete tasks more quickly, typically measured in seconds, compared to other methods. However, it is challenging to identify a clear trend from these results. Consequently, the choice of dimensions in the Hilbert space seems to have little effect on execution time across all algorithms.
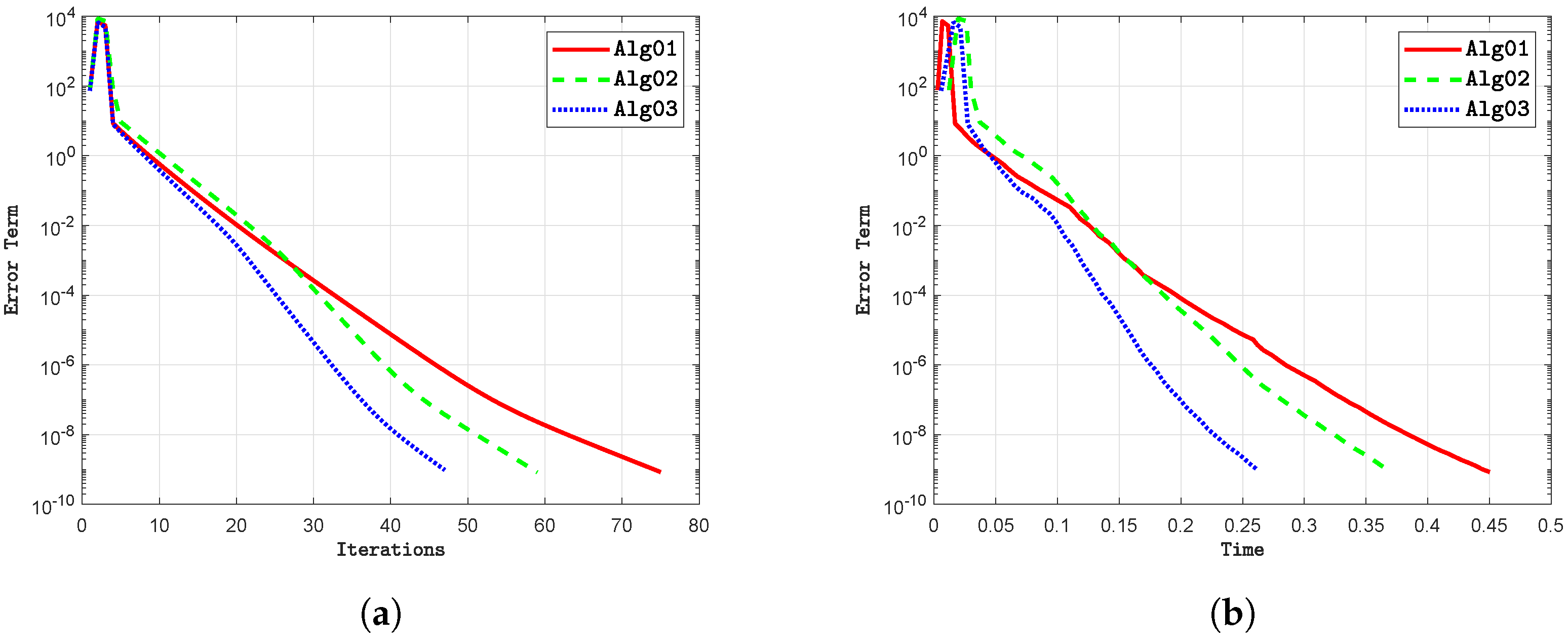
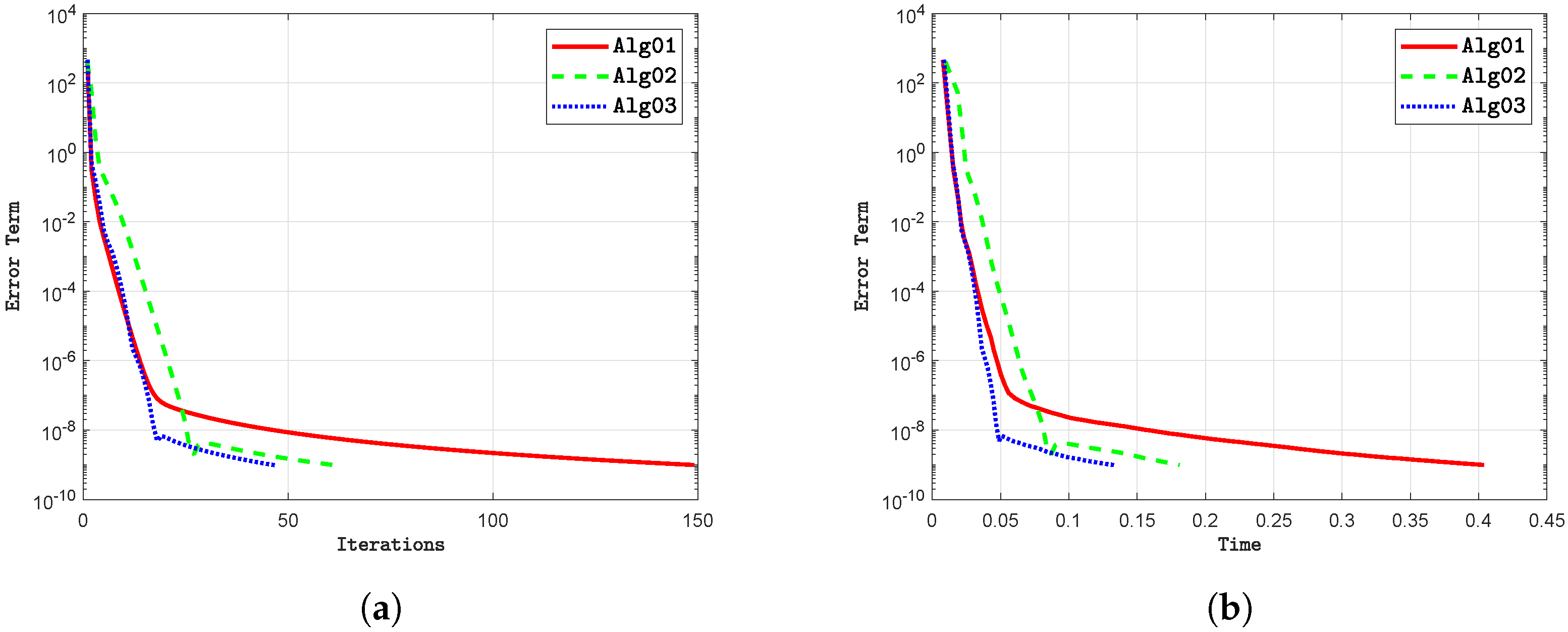
- (i)
- The proposed algorithm consistently demonstrates a lower number of iterations compared to alternative methods across different scenarios. It is evident that, regardless of the algorithm employed, the dimensionality of the Hilbert space significantly influences the iteration count. Notably, as the dimensionality increases, the iteration count also increases for all algorithms.
- (ii)
- The proposed algorithm consistently exhibits shorter execution times, measured in seconds, compared to alternative methods across various scenarios. It is apparent that, irrespective of the algorithm utilized, the dimensionality of the Hilbert space has a significant impact on execution time. Importantly, as the dimensionality increases, execution time also tends to increase for all algorithms.
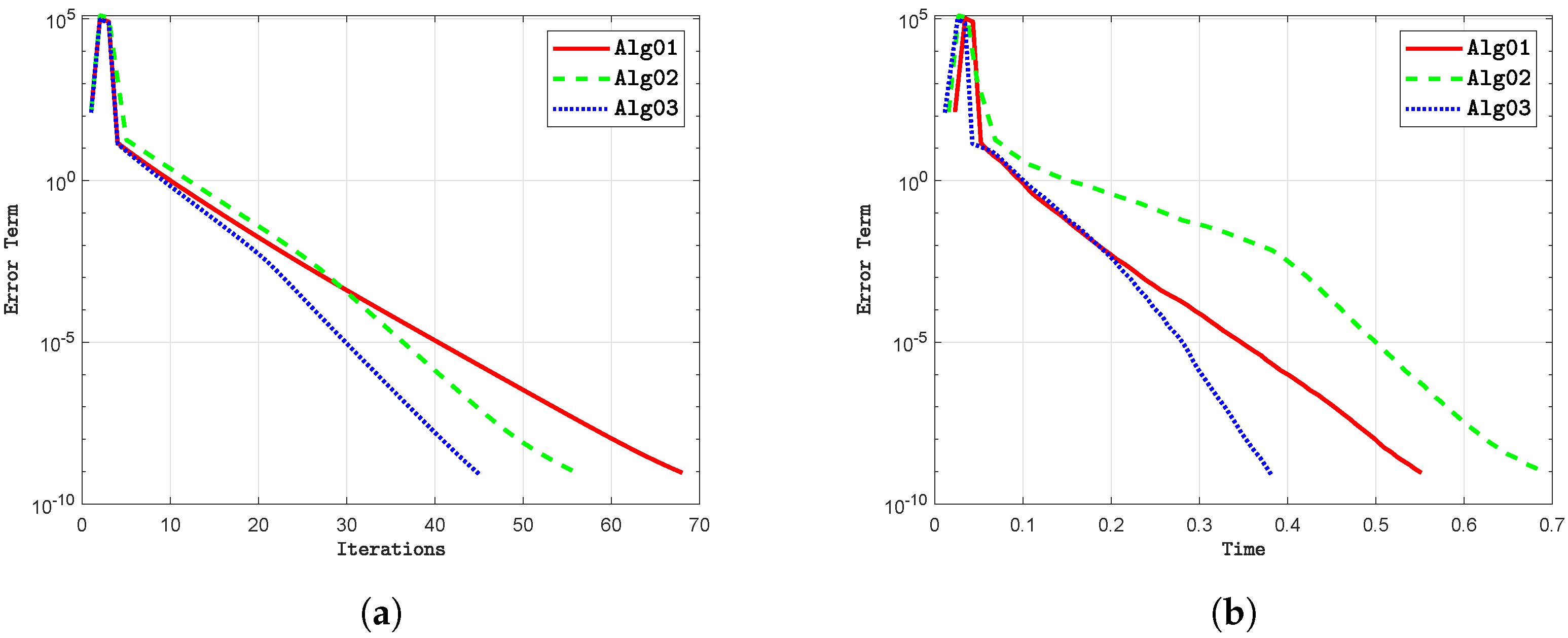
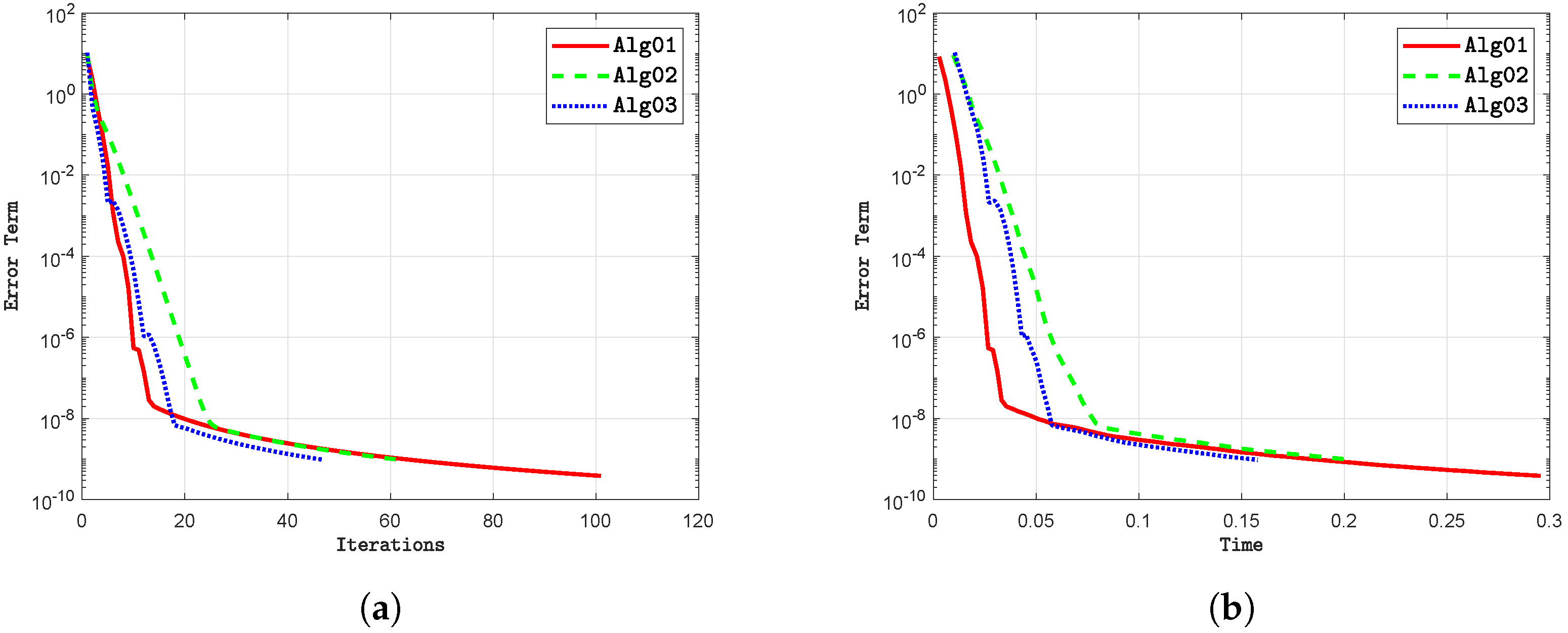
- i
- Modifying the initial points and influences the number of iterations required by the algorithms. Our proposed method generally requires fewer iterations compared to existing approaches.
- ii
- The execution time for each algorithm varies based on the selected initial points; however, our method typically completes in less time than the alternatives.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qin, X.; An, N.T. Smoothing algorithms for computing the projection onto a Minkowski sum of convex sets. Comput. Optim. Appl. 2019, 74, 821–850. [Google Scholar] [CrossRef]
- An, N.T.; Nam, N.M.; Qin, X. Solving k-center problems involving sets based on optimization techniques. J. Glob. Optim. 2019, 76, 189–209. [Google Scholar] [CrossRef]
- Hussien, A.G.; Hassanien, A.E.; Houssein, E.H.; Amin, M.; Azar, A.T. New binary whale optimization algorithm for discrete optimization problems. Eng. Optim. 2019, 52, 945–959. [Google Scholar] [CrossRef]
- Elmorshedy, M.F.; Almakhles, D.; Allam, S.M. Improved performance of linear induction motors based on optimal duty cycle finite-set model predictive thrust control. Heliyon 2024, 10, e34169. [Google Scholar] [CrossRef] [PubMed]
- Banerjee, P.; Roy, S.; Sinha, A.; Hassan, M.M.; Burje, S.; Agrawal, A.; Bairagi, A.K.; Alshathri, S.; El-Shafai, W. MTD-DHJS: Makespan-Optimized Task Scheduling Algorithm for Cloud Computing with Dynamic Computational Time Prediction. IEEE Access 2023, 11, 105578–105618. [Google Scholar] [CrossRef]
- Debnath, P.; Torres, D.F.M.; Cho, Y.J. Advanced Mathematical Analysis and Its Applications; Chapman and Hall/CRC: Boca Raton, FL, USA, 2023. [Google Scholar] [CrossRef]
- Nash, J.F. Equilibrium points in n-person games. Proc. Natl. Acad. Sci. USA 1950, 36, 48–49. [Google Scholar] [CrossRef]
- Long, G.; Liu, S.; Xu, G.; Wong, S.W.; Chen, H.; Xiao, B. A Perforation-Erosion Model for Hydraulic-Fracturing Applications. SPE Prod. Oper. 2018, 33, 770–783. [Google Scholar] [CrossRef]
- Arrow, K.J.; Debreu, G. Existence of an Equilibrium for a Competitive Economy. Econometrica 1954, 22, 265–290. [Google Scholar] [CrossRef]
- Kundur, D.; Hatzinakos, D. Blind image deconvolution. IEEE Signal Process. Mag. 1996, 13, 4–64. [Google Scholar] [CrossRef]
- Patriksson, M. The Traffic Assignment Problem: Models and Methods; Courier Dover Publications: Chicago, IL, USA, 2015. [Google Scholar]
- Nash, J. Non-Cooperative Games. Ann. Math. 1951, 54, 286. [Google Scholar] [CrossRef]
- Fan, K. A Minimax Inequality and Applications. In Inequalities III; Shisha, O., Ed.; Academic Press: New York, NY, USA, 1972. [Google Scholar]
- Nikaidô, H.; Isoda, K. Note on non-cooperative convex game. Pac. J. Math. 1955, 5, 807–815. [Google Scholar] [CrossRef]
- Gwinner, J. On the penalty method for constrained variational inequalities. Optim. Theory Algorithms 1981, 86, 197–211. [Google Scholar]
- Flåm, S.D.; Antipin, A.S. Equilibrium programming using proximal-like algorithms. Math. Program. 1996, 78, 29–41. [Google Scholar] [CrossRef]
- Tran, D.Q.; Dung, M.L.; Nguyen, V.H. Extragradient algorithms extended to equilibrium problems. Optimization 2008, 57, 749–776. [Google Scholar] [CrossRef]
- Korpelevich, G. The extragradient method for finding saddle points and other problems. Matecon 1976, 12, 747–756. [Google Scholar]
- Rehman, H.U.; Kumam, W.; Sombut, K. Inertial modification using self-adaptive subgradient extragradient techniques for equilibrium programming applied to variational inequalities and fixed-point problems. Mathematics 2022, 10, 1751. [Google Scholar] [CrossRef]
- Ceng, L.C.; Yao, J.C. A hybrid iterative scheme for mixed equilibrium problems and fixed point problems. J. Comput. Appl. Math. 2008, 214, 186–201. [Google Scholar] [CrossRef]
- Zeng, L.C.; Yao, J.C. Strong convergence theorem by an extragradient method for fixed point problems and variational inequality problems. Taiwan. J. Math. 2006, 10, 1293–1303. [Google Scholar] [CrossRef]
- Peng, J.W.; Yao, J.C. A new hybrid-extragradient method for generalized mixed equilibrium problems, fixed point problems and variational inequality problems. Taiwan. J. Math. 2008, 12, 1401–1432. [Google Scholar] [CrossRef]
- Kumam, W.; Rehman, H.U.; Kumam, P. A new class of computationally efficient algorithms for solving fixed-point problems and variational inequalities in real Hilbert spaces. J. Inequalities Appl. 2023, 2023, 48. [Google Scholar] [CrossRef]
- Rehman, H.; Kumam, P.; Suleiman, Y.I.; Kumam, W. An adaptive block iterative process for a class of multiple sets split variational inequality problems and common fixed point problems in hilbert spaces. Numer. Algebr. Control Optim. 2023, 13, 273–298. [Google Scholar] [CrossRef]
- Khunpanuk, C.; Panyanak, B.; Pakkaranang, N. A New Construction and Convergence Analysis of Non-Monotonic Iterative Methods for Solving ρ-Demicontractive Fixed Point Problems and Variational Inequalities Involving Pseudomonotone Mapping. Mathematics 2022, 10, 623. [Google Scholar] [CrossRef]
- Anh, P.N. A hybrid extragradient method extended to fixed point problems and equilibrium problems. Optimization 2013, 62, 271–283. [Google Scholar] [CrossRef]
- Vuong, P.T.; Strodiot, J.J.; Nguyen, V.H. Extragradient methods and linesearch algorithms for solving Ky Fan inequalities and fixed point problems. J. Optim. Theory Appl. 2012, 155, 605–627. [Google Scholar] [CrossRef]
- Vuong, P.T.; Strodiot, J.J.; Nguyen, V.H. On extragradient-viscosity methods for solving equilibrium and fixed point problems in a Hilbert space. Optimization 2015, 64, 429–451. [Google Scholar] [CrossRef]
- Takahashi, W.; Wen, C.; Yao, J. The shrinking projection method for a finite family of demimetric mapping with variational inequality problems in a Hilbert space. Fixed Point Theor. 2018, 19, 407–420. [Google Scholar] [CrossRef]
- Dadashi, V.; Iyiola, O.S.; Shehu, Y. The subgradient extragradient method for pseudomonotone equilibrium problems. Optimization 2020, 69, 901–923. [Google Scholar] [CrossRef]
- Hieu, D.V.; Gibali, A. Strong convergence of inertial algorithms for solving equilibrium problems. Optim. Lett. 2020, 14, 1817–1843. [Google Scholar] [CrossRef]
- Hieu, D.V.; Quy, P.K.; Vy, L.V. Explicit iterative algorithms for solving equilibrium problems. Calcolo 2019, 56, 11. [Google Scholar] [CrossRef]
- Shehu, Y.; Iyiola, O.S.; Thong, D.V.; Van, N.T.C. An inertial subgradient extragradient algorithm extended to pseudomonotone equilibrium problems. Math. Meth. Oper. Res. 2021, 93, 213–242. [Google Scholar] [CrossRef]
- Censor, Y.; Gibali, A.; Reich, S. The subgradient extragradient method for solving variational inequalities in Hilbert space. J. Optim. Theory Appl. 2011, 148, 318–335. [Google Scholar] [CrossRef] [PubMed]
- Censor, Y.; Gibali, A.; Reich, S. Strong convergence of subgradient extragradient methods for the variational inequality problem in Hilbert space. Optim. Methods Softw. 2011, 26, 827–845. [Google Scholar] [CrossRef]
- Thong, D.V.; Cholamjiak, P.; Rassias, M.T.; Cho, Y.J. Strong convergence of inertial subgradient extragradient algorithm for solving pseudomonotone equilibrium problems. Optim. Lett. 2021, 73, 1329–1354. [Google Scholar] [CrossRef]
- Hieu, D.V. Strong convergence of a new hybrid algorithm for fixed point problems and equilibrium problems. Math. Model. Anal. 2018, 24, 1–19. [Google Scholar] [CrossRef]
- Tan, B.; Cho, S.Y.; Yao, J.C. Accelerated inertial subgradient extragradient algorithms with non-monotonic stepsizes for equilibrium problems and fixed point problems. J. Nonlinear Var. Anal. 2022, 6, 89–122. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces, 2nd ed.; CMS Books in Mathematics; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Bianchi, M.; Schaible, S. Generalized monotone bifunctions and equilibrium problems. J. Optim. Theory Appl. 1996, 90, 31–43. [Google Scholar] [CrossRef]
- Takahashi, W. A general iterative method for split common fixed point problems in Hilbert spaces and applications. Pure Appl. Funct. Anal. 2018, 3, 349–370. [Google Scholar]
- Song, Y. Iterative methods for fixed point problems and generalized split feasibility problems in Banach spaces. J. Nonlinear Sci. Appl. 2018, 11, 198–217. [Google Scholar] [CrossRef]
- Goebel, K.; Kirk, W. Topics in Metric Fixed Point Theory; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar] [CrossRef]
- Saejung, S.; Yotkaew, P. Approximation of zeros of inverse strongly monotone operators in Banach spaces. Nonlinear Anal. Theor. 2012, 75, 742–750. [Google Scholar] [CrossRef]
- Harker, P.T.; Pang, J.S. For the Linear Complementarity Problem; Lectures in Applied Mathematics; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1990; Volume 26. [Google Scholar]
- Hieu, D.V.; Anh, P.K.; Muu, L.D. Modified hybrid projection methods for finding common solutions to variational inequality problems. Comput. Optim. Appl. 2016, 66, 75–96. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m | Iterations/Time | ||
|---|---|---|---|
| Alg01 | Alg02 | Alg03 | |
| 5 | 67/0.3111841 | 49/0.2369935 | 35/0.2117653 |
| 10 | 77/0.6932886 | 59/0.4885111 | 48/0.3821908 |
| 50 | 75/0.4502335 | 59/0.3711017 | 47/0.2621170 |
| 100 | 68/0.5512957 | 56/0.6928128 | 45/0.3807845 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
ur Rehman, H.; Amir, F.; Alzabut, J.; Azim, M.A. An Inertial Subgradient Extragradient Method for Efficiently Solving Fixed-Point and Equilibrium Problems in Infinite Families of Demimetric Mappings. Mathematics 2025, 13, 20. https://doi.org/10.3390/math13010020
ur Rehman H, Amir F, Alzabut J, Azim MA. An Inertial Subgradient Extragradient Method for Efficiently Solving Fixed-Point and Equilibrium Problems in Infinite Families of Demimetric Mappings. Mathematics. 2025; 13(1):20. https://doi.org/10.3390/math13010020
Chicago/Turabian Styleur Rehman, Habib, Fouzia Amir, Jehad Alzabut, and Mohammad Athar Azim. 2025. "An Inertial Subgradient Extragradient Method for Efficiently Solving Fixed-Point and Equilibrium Problems in Infinite Families of Demimetric Mappings" Mathematics 13, no. 1: 20. https://doi.org/10.3390/math13010020
APA Styleur Rehman, H., Amir, F., Alzabut, J., & Azim, M. A. (2025). An Inertial Subgradient Extragradient Method for Efficiently Solving Fixed-Point and Equilibrium Problems in Infinite Families of Demimetric Mappings. Mathematics, 13(1), 20. https://doi.org/10.3390/math13010020