

Real-Time Motorbike Detection: AI on the Edge Perspective



Abstract
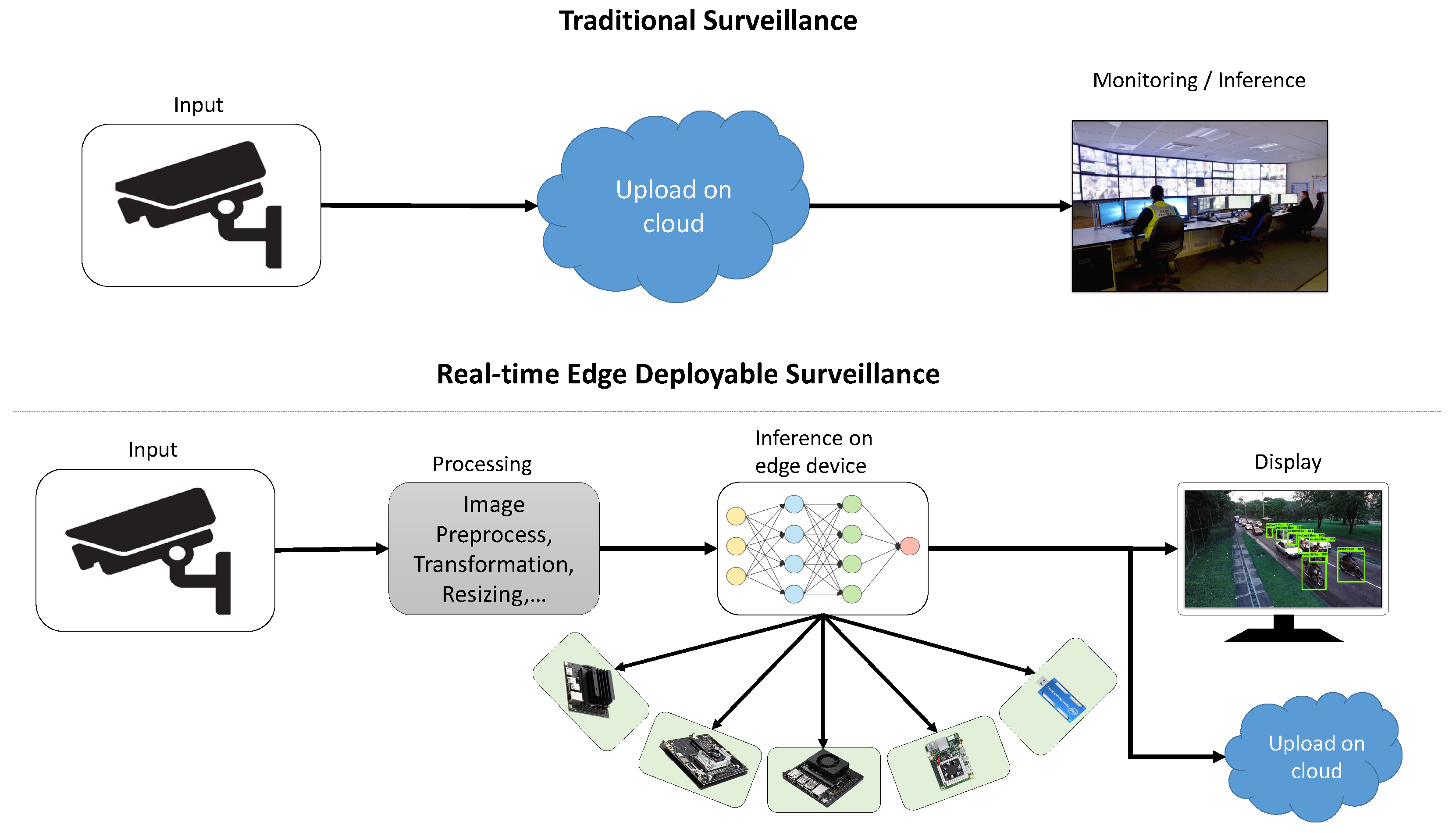
1. Introduction
2. Related Work
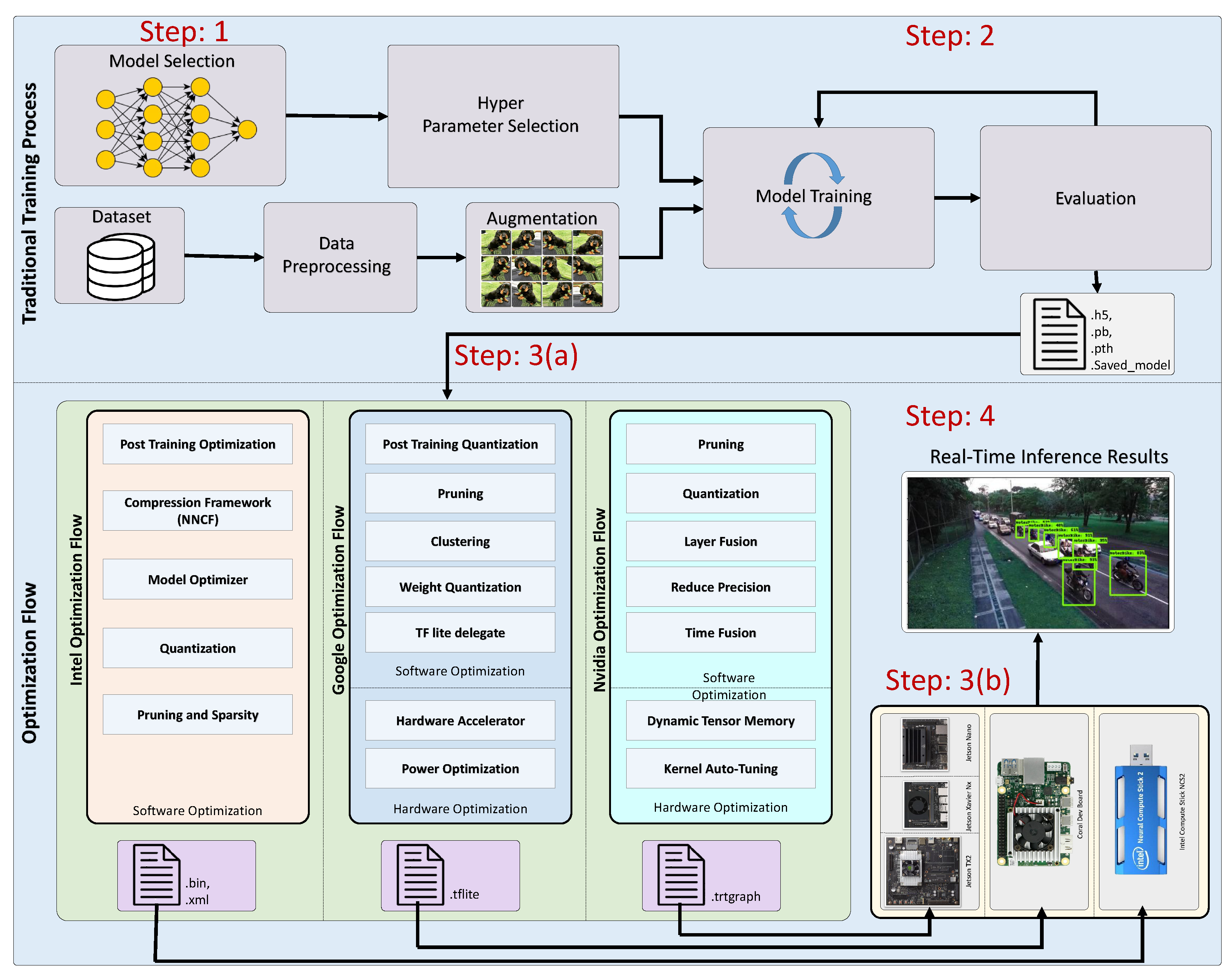
3. Methodology
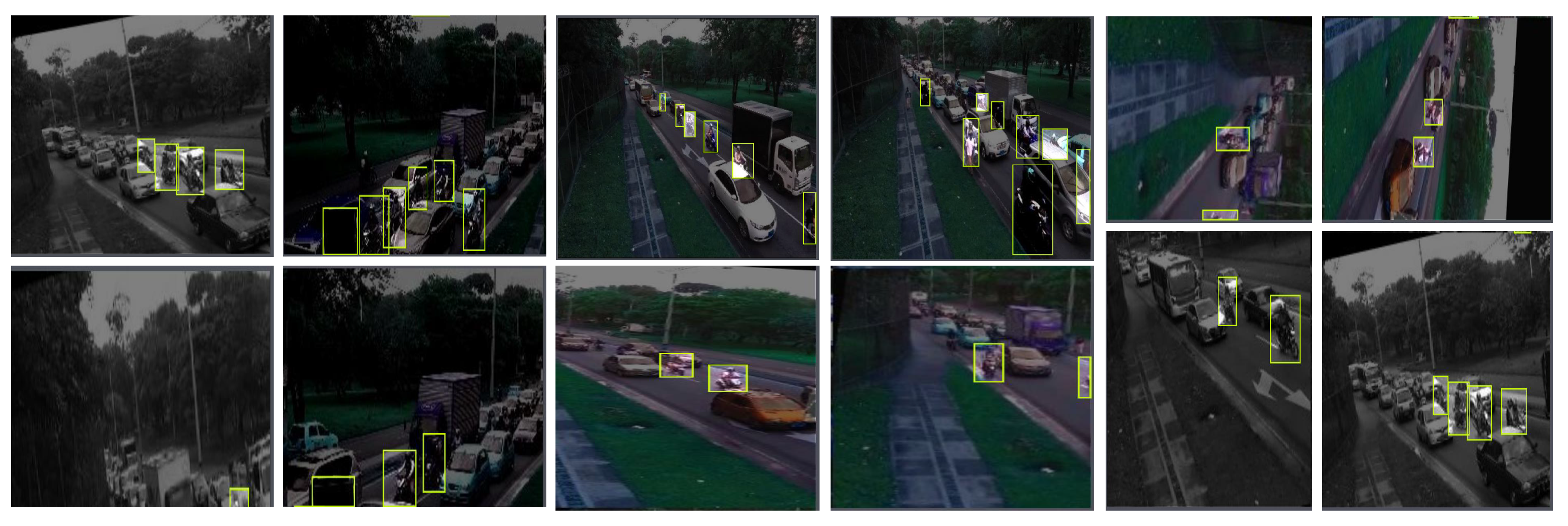
3.1. Dataset and Augmentation
3.2. Model Selection
3.2.1. Single Shot Detection (SSD)
3.2.2. Customized YoloV5
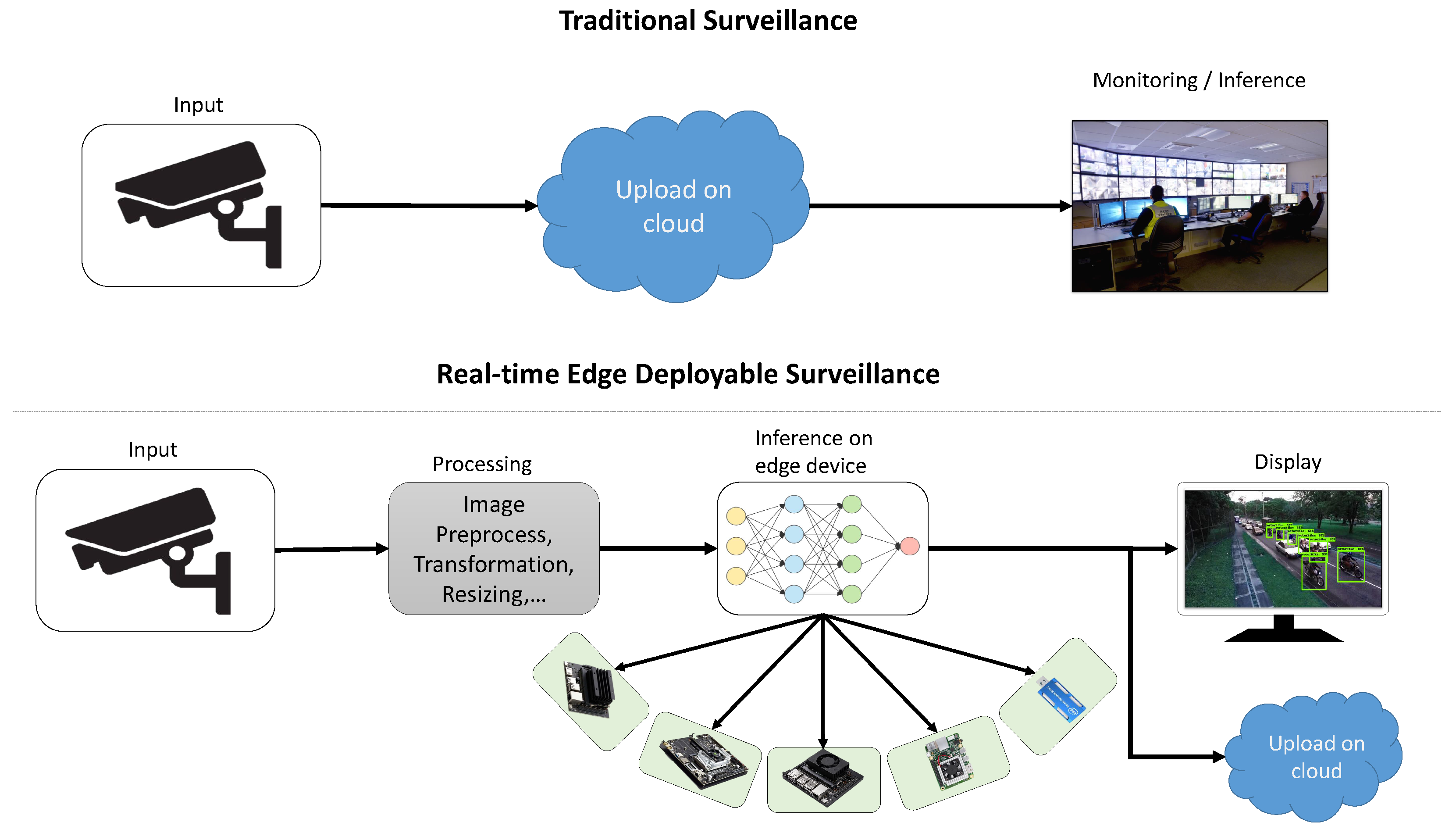
3.3. Edge Deployment
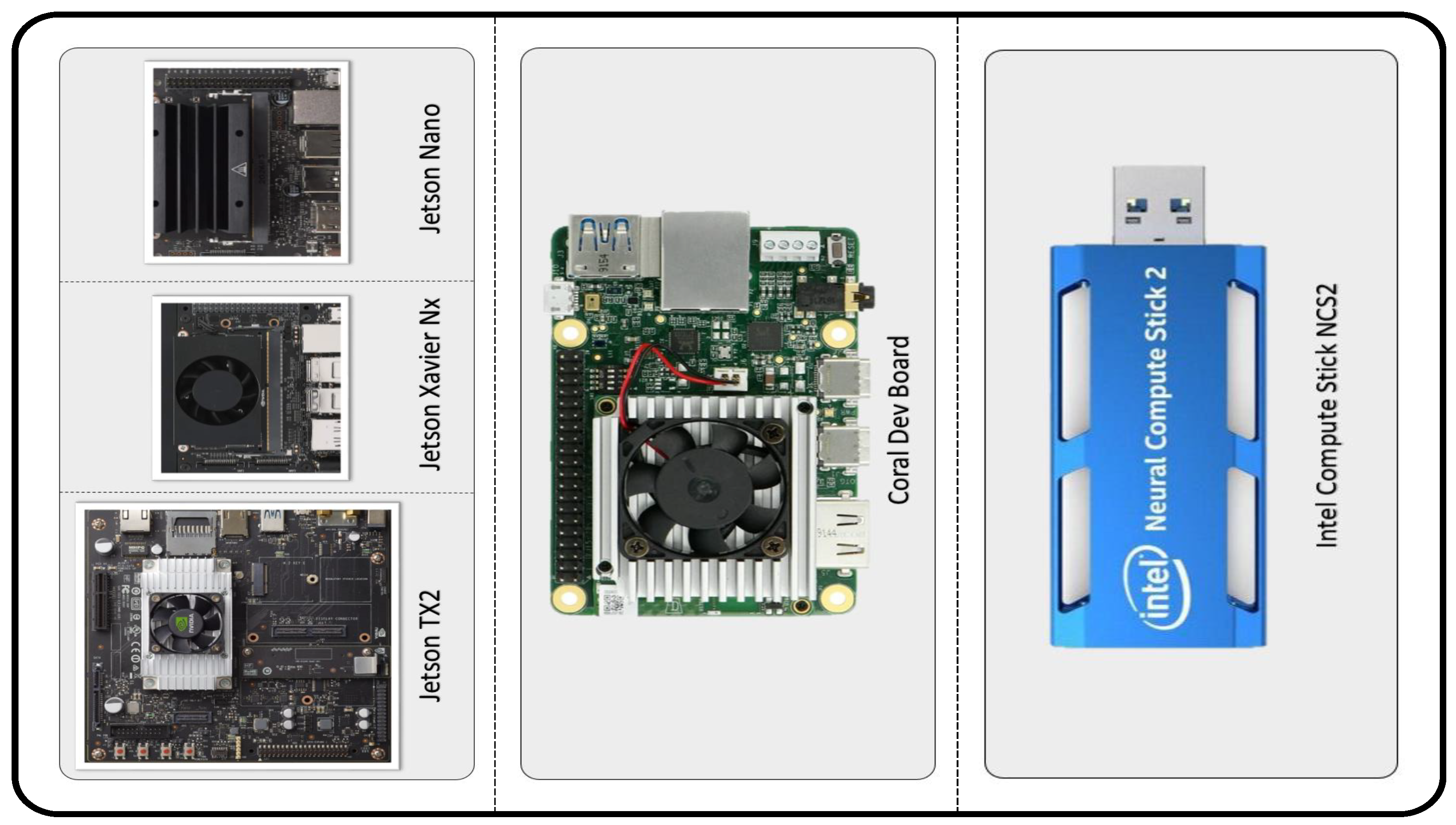
3.3.1. Edge Devices
- Google (USA, CA, Mountain View)
- Coral Dev Board.
- NVIDIA (USA, CA, Santa Clara)
- Jetson Nano;
- Jetson Tx2;
- Jetson Xavier Nx.
- INTEL (USA, CA, Santa Clara)
- Intel Neural Compute Stick 2 (NCS2).
3.3.2. Optimization
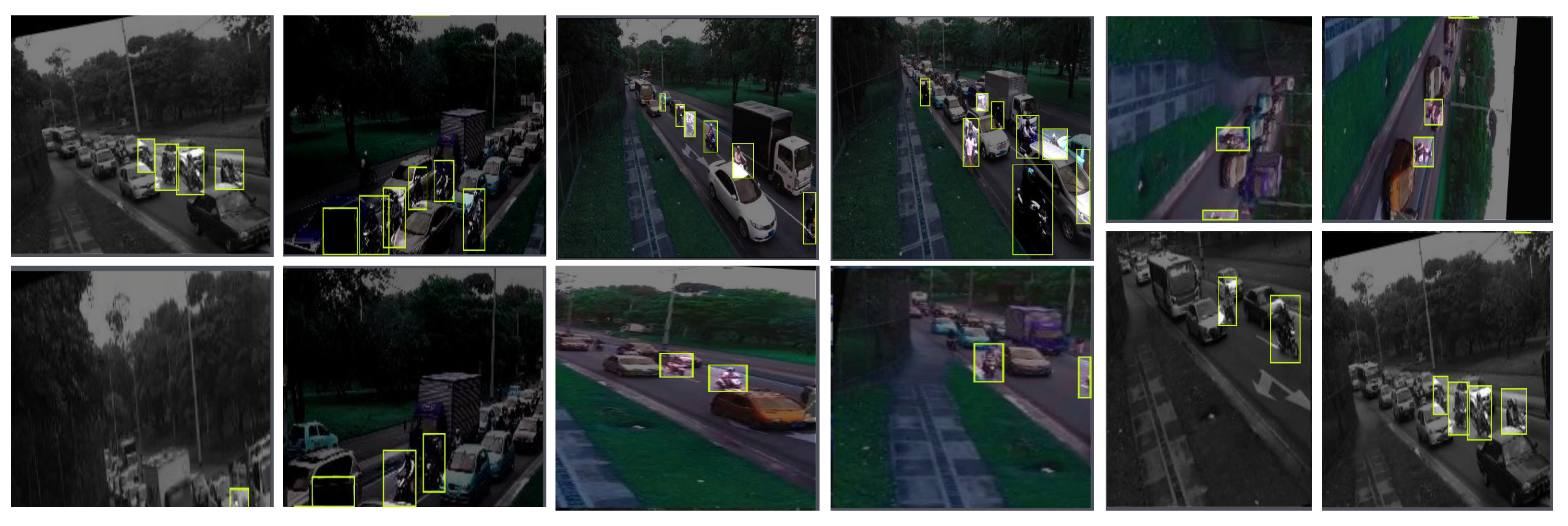
4. Results
4.1. Experimental Setup
4.1.1. Dataset
4.1.2. Evaluation Metrics
4.2. Result and Analysis
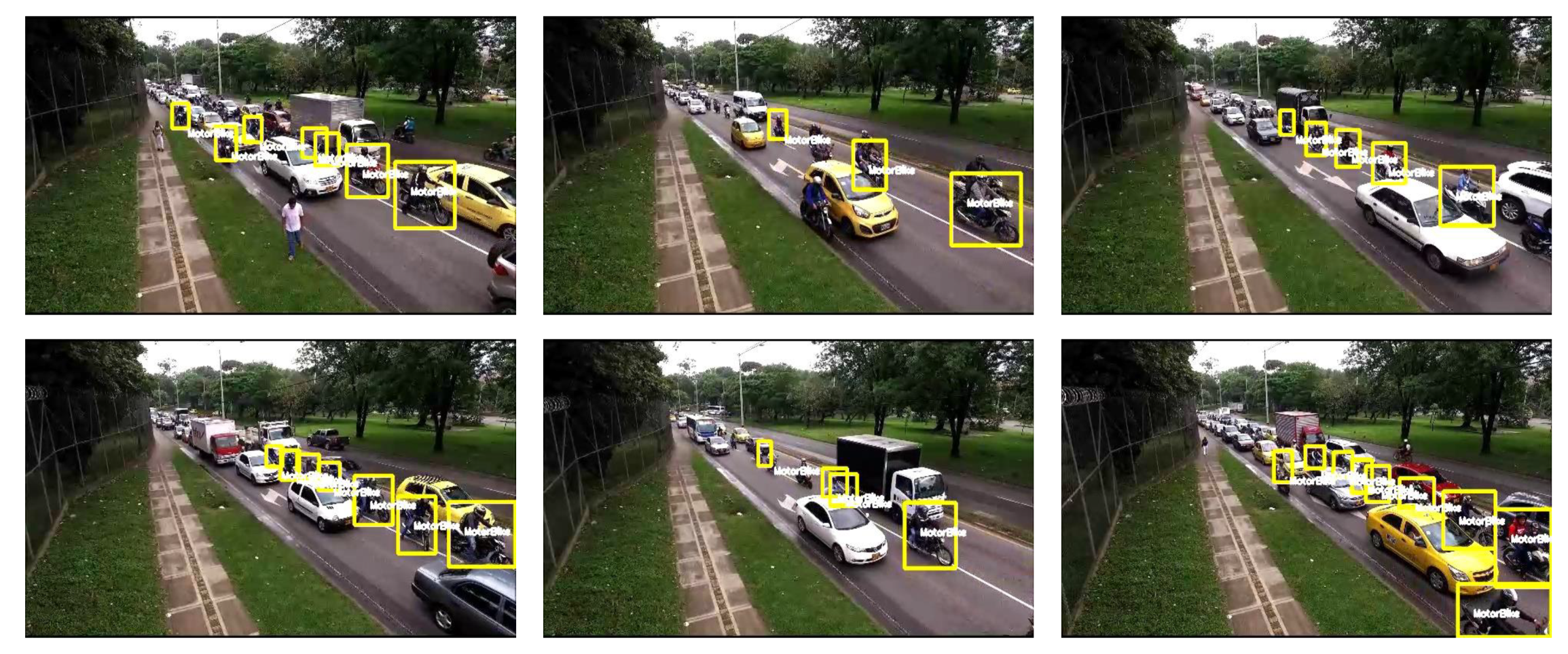
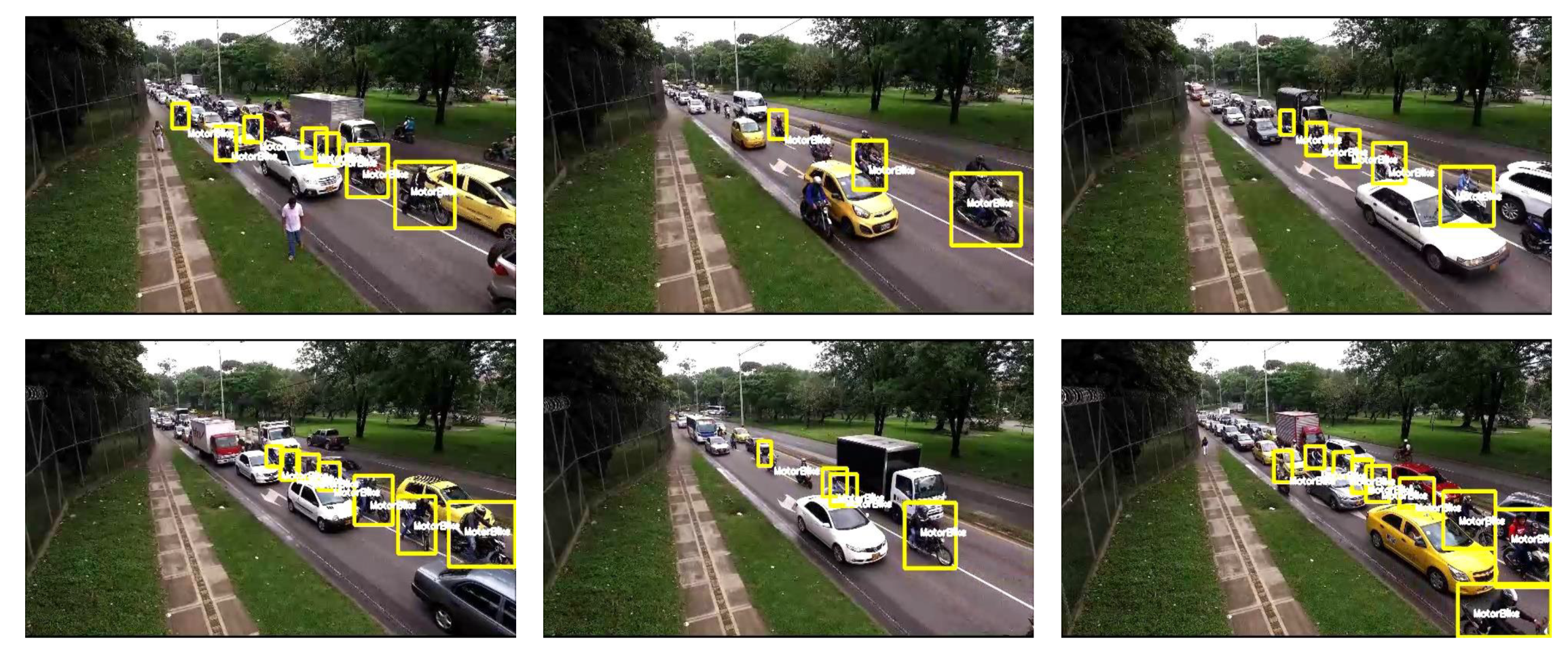
4.2.1. Results and Analysis Using SSD Mobilenet V2
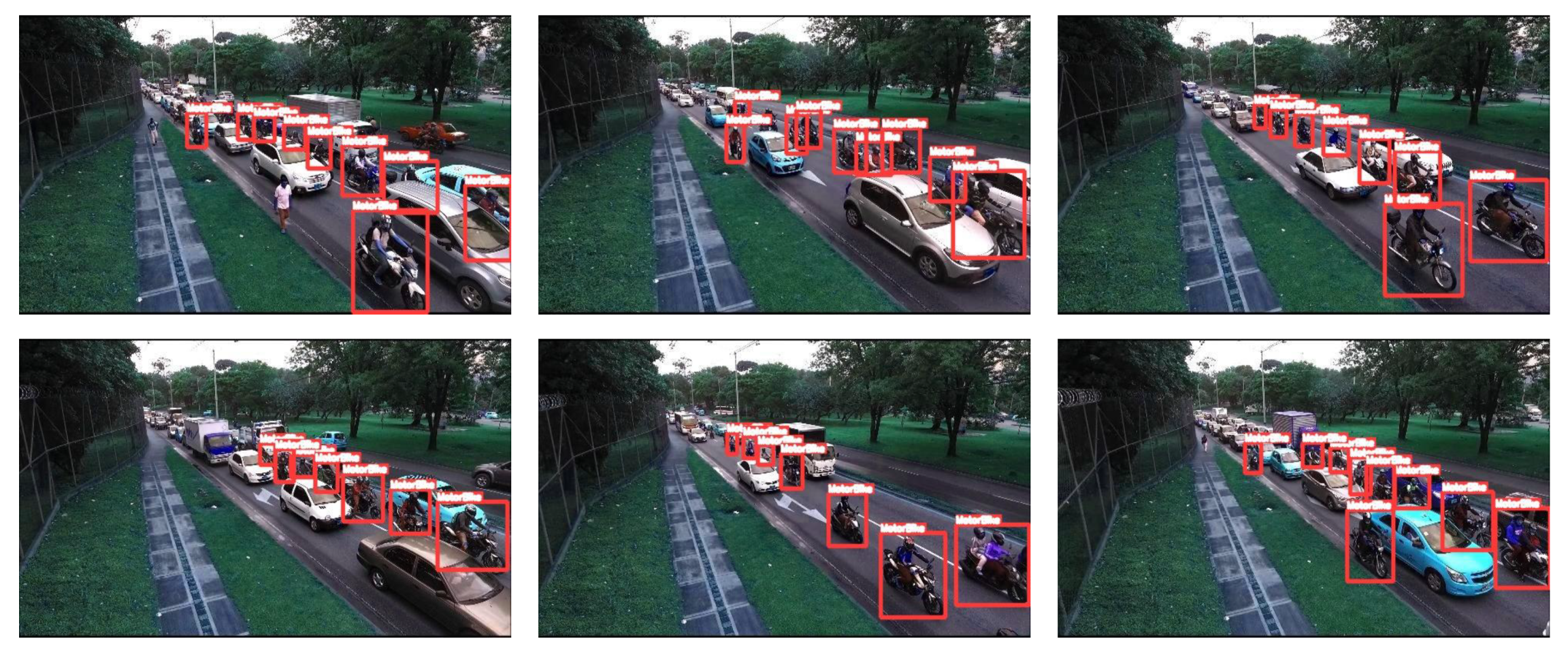
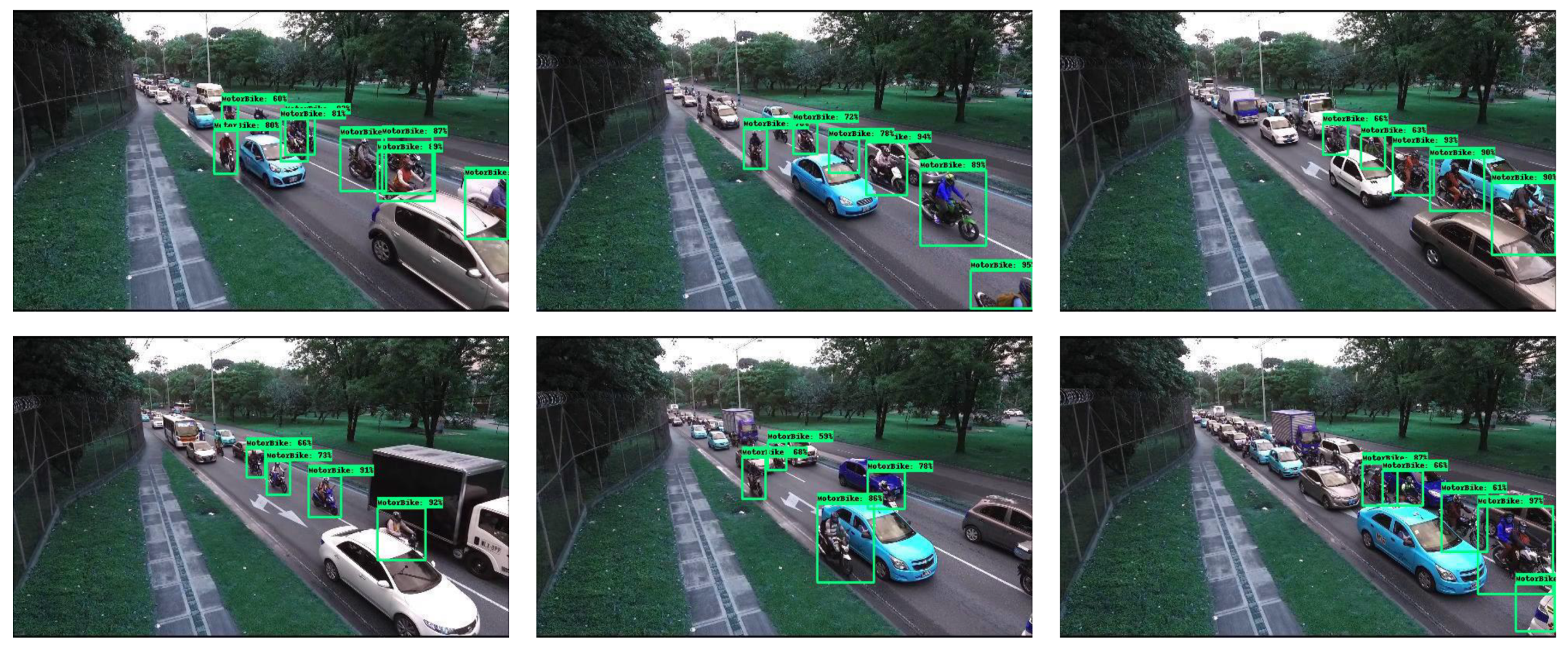
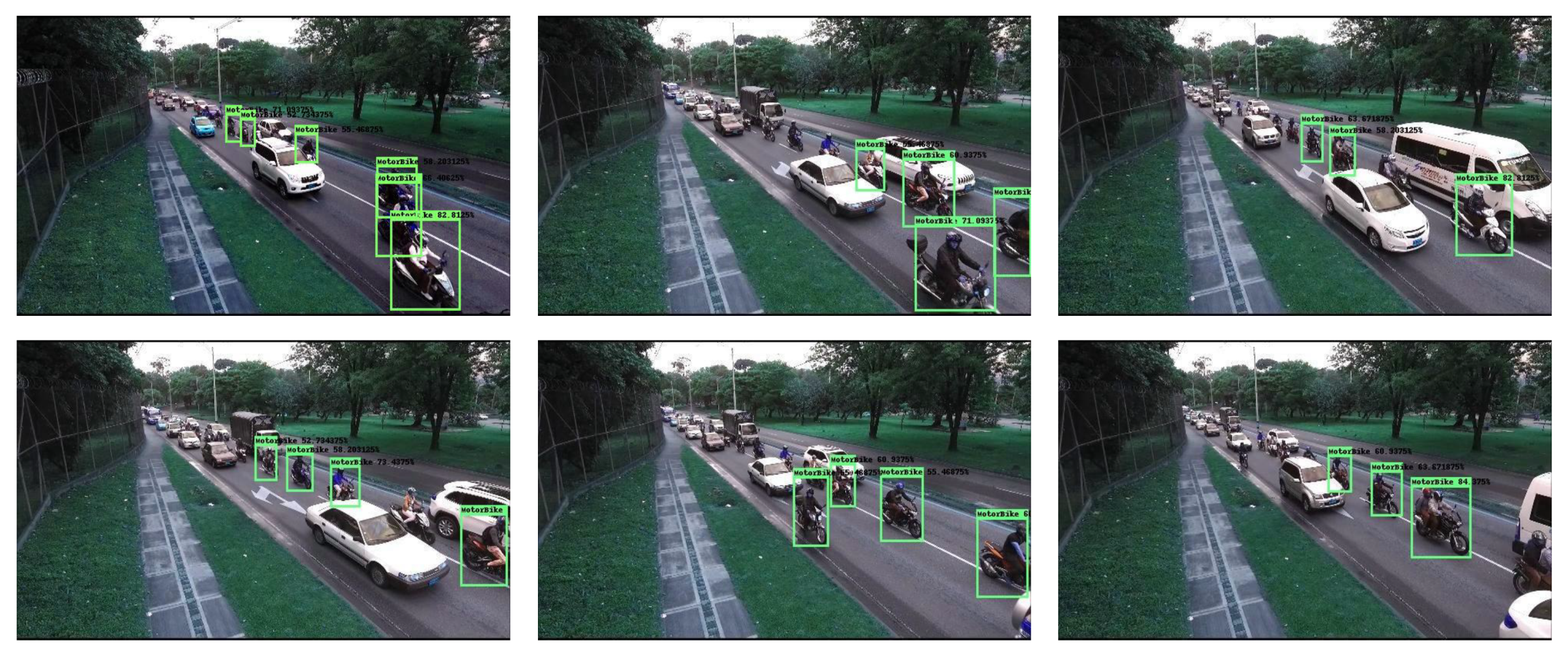
4.2.2. Results and Analysis of Customized YoloV5
- It gives consistently high mean average precision.
- It gives higher FPS on GPU.
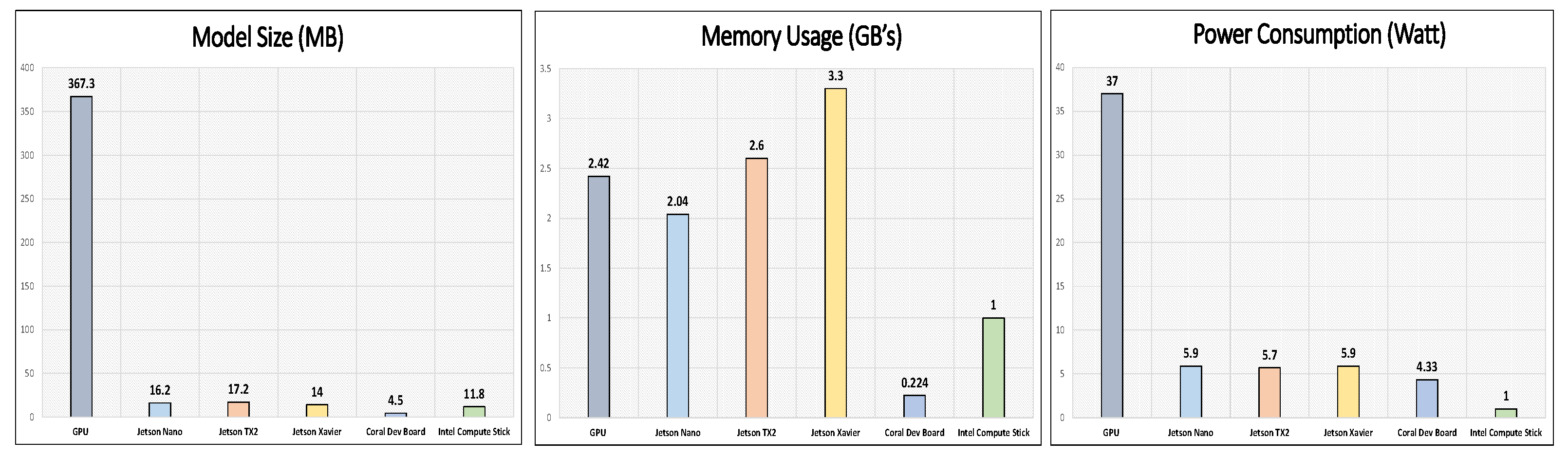
- Model size is very small.
- It uses less memory resources.
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Keerthi, K.V.L.; Krishna Teja, V.; Chandra Sekhar, P.N.R.L.; Shankar, T.N. Automatic Recognition of Helmetless Bike Rider License Plate Using Deep Learning. In Computational Vision and Bio-Inspired Computing; Advances in Intelligent Systems and Computing; Smys, S., Tavares, J.M.R.S., Bestak, R., Shi, F., Eds.; Springer: Singapore, 2021; pp. 457–467. [Google Scholar]
- Roy, R.; Kumar, S.; Dumbhare, P.; Barde, M. Helmet Detection and Number Plate Recognition using Machine Learning. In Proceedings of the 2022 IEEE Region 10 Symposium (TENSYMP), Mumbai, India, 1–3 July 2022. [Google Scholar]
- Premmaran, G.; Sathishkumar, P. Detection of Helmetless Riders and Automatic Number Plate Recognition Using Machine Learning. In Proceedings of the 2022 International Conference on Applied Artificial Intelligence and Computing (ICAAIC), Salem, India, 9–11 May 2022; pp. 339–345. [Google Scholar] [CrossRef]
- Silva, R.R.; Aires, K.R.; Veras, R.D. Detection of helmets on motorcyclists. Multimed. Tools Appl. 2018, 77, 5659–5683. [Google Scholar] [CrossRef]
- Mukhtar, A.; Tang, T.B. Vision based motorcycle detection using HOG features. In Proceedings of the 2015 IEEE International Conference on Signal and Image Processing Applications (ICSIPA), Kuala Lumpur, Malaysia, 19–21 October 2015; pp. 452–456. [Google Scholar]
- Wonghabut, P.; Kumphong, J.; Satiennam, T.; Ung-Arunyawee, R.; Leelapatra, W. Automatic helmet-wearing detection for law enforcement using CCTV cameras. In Proceedings of the IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018; Volume 143, p. 012063. [Google Scholar]
- Gavadi, R.J.; Patil, S.S. Automatic detection of motorcyclist without helmet using haar cascade classifier. J. Integr. Sci. Technol. 2018, 6, 33–36. [Google Scholar]
- Ghonge, S.A.; Sanghavi, J.B. Smart surveillance system for automatic detection of license plate number of motorcyclists without helmet. Int. J. Comput. Sci. Eng 2018, 2, 86–89. [Google Scholar] [CrossRef]
- Dahiya, K.; Singh, D.; Mohan, C.K. Automatic detection of bike-riders without helmet using surveillance videos in real-time. In Proceedings of the 2016 International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 3046–3051. [Google Scholar]
- Singh, D.; Vishnu, C.; Mohan, C.K. Visual Big Data Analytics for Traffic Monitoring in Smart City. In Proceedings of the IEEE International Conference on Machine Learning and Applications (ICMLA), Anaheim, CA, USA, 18–20 December 2016. [Google Scholar]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 2, pp. 1150–1157. [Google Scholar]
- Barış, İ.; Baştanlar, Y. Classification and tracking of traffic scene objects with hybrid camera systems. In Proceedings of the 20th IEEE International Conference on Intelligent Transportation Systems, ITSC 2017, Yokohama, Japan, 16–19 October 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018. [Google Scholar]
- Shuo, Y.; Choi, E.J. A driving support system base on traffic environment analysis. Indian J. Sci. Technol 2016, 9, 286–290. [Google Scholar] [CrossRef]
- Dupuis, Y.; Subirats, P.; Vasseur, P. Robust image segmentation for overhead real time motorbike counting. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 3070–3075. [Google Scholar]
- Le, T.S.; Huynh, C.K. An unified framework for motorbike counting and detecting in traffic videos. In Proceedings of the 2015 International Conference on Advanced Computing and Applications (ACOMP), Ho Chi Minh City, Vietnam, 23–25 November 2015; pp. 162–168. [Google Scholar]
- Waranusast, R.; Bundon, N.; Timtong, V.; Tangnoi, C.; Pattanathaburt, P. Machine vision techniques for motorcycle safety helmet detection. In Proceedings of the 2013 28th International Conference on Image and Vision Computing New Zealand (IVCNZ 2013), Wellington, New Zealand, 27–29 November 2013; pp. 35–40. [Google Scholar]
- Huynh, C.K.; Le, T.S.; Hamamoto, K. Convolutional neural network for motorbike detection in dense traffic. In Proceedings of the 2016 IEEE Sixth International Conference on Communications and Electronics (ICCE), Ha-Long, Vietnam, 27–29 July 2016; pp. 369–374. [Google Scholar]
- Espinosa, J.E.; Velastin, S.A.; Branch, J.W. Motorcycle detection and classification in urban Scenarios using a model based on Faster R-CNN. In Proceedings of the 9th International Conference on Pattern Recognition Systems (ICPRS 2018), Valparaíso, Chile, 22–24 May 2018. [Google Scholar]
- Espinosa, J.E.; Velastin, S.A.; Branch, J.W. Detection and tracking of motorcycles in congested urban environments using deep learning and Markov decision processes. In Proceedings of the Mexican Conference on Pattern Recognition, Querétaro, Mexico, 26–29 June 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 139–148. [Google Scholar]
- Wang, K.; Zhou, W. Pedestrian and cyclist detection based on deep neural network fast R-CNN. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419829651. [Google Scholar] [CrossRef]
- Kausar, A.; Jamil, A.; Nida, N.; Yousaf, M.H. Two-wheeled vehicle detection using two-step and single-step deep learning models. Arab. J. Sci. Eng. 2020, 45, 10755–10773. [Google Scholar] [CrossRef]
- Shubho, F.H.; Iftekhar, F.; Hossain, E.; Siddique, S. Real-time traffic monitoring and traffic offense detection using YOLOv4 and OpenCV DNN. In Proceedings of the TENCON 2021–2021 IEEE Region 10 Conference (TENCON), Auckland, New Zealand, 7–10 December 2021; pp. 46–51. [Google Scholar] [CrossRef]
- Miao, Y.; Zhang, S.; He, S. Real-Time Detection Network SI-SSD for Weak Targets in Complex Traffic Scenarios. Neural Process. Lett. 2022, 54, 3235–3247. [Google Scholar] [CrossRef]
- Khandelwal, Y.; Anwar, S.; Agarwal, S.; Tripathi, V.; Pandey, P. A Framework for Enhancing the Security of Motorbike Riders in Real Time. In Intelligent Computing in Engineering; Springer: Berlin/Heidelberg, Germany, 2020; pp. 275–281. [Google Scholar]
- Espinosa, J.E.; Velastín, S.A.; Branch, J.W. Detection of Motorcycles in Urban Traffic Using Video Analysis: A Review. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6115–6130. [Google Scholar] [CrossRef]
- Gepperth, A.; Dittes, B.; Garcia-Ortiz, M. The contribution of context information: A case study of object recognition in an intelligent car. Neurocomputing 2012, 94, 77–86. [Google Scholar] [CrossRef]
- Bileschi, S.M. StreetScenes: Towards Scene Understanding in Still Images. Ph.D. Thesis, Massachusetts Institute of Technology, Dept. of Electrical Engineering and Computer Science, Cambridge, MA, USA, 2006. Available online: https://dspace.mit.edu/handle/1721.1/37896 (accessed on 30 March 2024).
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets Robotics: The KITTI Dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The PASCAL Visual Object Classes Challenge 2007 (VOC2007) Results. Available online: http://host.robots.ox.ac.uk/pascal/VOC/voc2007/ (accessed on 30 March 2024).
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The PASCAL Visual Object Classes Challenge 2012 (VOC2012) Results. Available online: http://host.robots.ox.ac.uk/pascal/VOC/voc2012/ (accessed on 30 March 2024).
- Griffin, G.; Holub, A.; Perona, P. CaltechDATA: Caltech 256. Available online: https://data.caltech.edu/records/nyy15-4j048 (accessed on 30 March 2024).
- Thai, N.D.; Le, T.S.; Thoai, N.; Hamamoto, K. Learning bag of visual words for motorbike detection. In Proceedings of the 2014 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10–12 December 2014; pp. 1045–1050. [Google Scholar]
- Sutikno, S.; Waspada, I.; Bahtiar, N.; Sasongko, P.S. Classification of motorcyclists not wear helmet on digital image with backpropagation neural network. Telkomnika Telecommun. Comput. Electron. Control. 2016, 14, 1128–1133. [Google Scholar] [CrossRef]
- Messelodi, S.; Modena, C.M.; Cattoni, G. Vision-based bicycle/motorcycle classification. Pattern Recognit. Lett. 2007, 28, 1719–1726. [Google Scholar] [CrossRef]
- Duan, B.; Liu, W.; Fu, P.; Yang, C.; Wen, X.; Yuan, H. Real-time on-road vehicle and motorcycle detection using a single camera. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Churchill, VIC, Australia, 10–13 February 2009; pp. 1–6. [Google Scholar]
- Nong, M.A.M.; Osman, R.; Yusof, J.M.; Sidek, R.M. Motorcycle image tracking and edge detections based on Simulink software. In Proceedings of the 2016 6th International Conference on Intelligent and Advanced Systems (ICIAS), Kuala Lumpur, Malaysia, 15–17 August 2016; pp. 1–4. [Google Scholar]
- Rashidan, M.; Mustafah, Y.; Shafie, A.; Zainuddin, N.; Aziz, N.; Azman, A. Moving object detection and classification using Neuro-Fuzzy approach. Int. J. Multimed. Ubiquitous Eng. 2016, 11, 253–266. [Google Scholar] [CrossRef]
- Espinosa, J.E.; Velastin, S.A.; Branch, J.W. MB7500 Data Set. Available online: http://videodatasets.org/UrbanMotorbike (accessed on 30 March 2024).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network | Mean Average Precision (mAP) | Inference Time (ms) | Frames Per Second (FPS) |
|---|---|---|---|
| SSD Mobilenet V2 | 91.5% | 20.218 | 49.46 |
| YoloV5 | 99.0% | 10.526 | 94.0 |
| Specification | Jetson Nano | Jetson TX2 | Jetson Xavier Nx | Coral Dev Board | NCS2 |
|---|---|---|---|---|---|
| AI Performance | 472 GFLOPs | 1.26 TFLOPs | 21 TOPs | 4 TOPS | 1 TOPS |
| RAM | 4 GB DDR4 | 8 GB DDR4 | 16 GB DDR4 | 1 GB LPDDR4 | - |
| Flash Memory | 16 GB eMMC 5.1 | 32 GB eMMC 5.1 | 16 GB eMMC 5.1 | 8 GB eMMC | - |
| CPU | Quad-core ARM Cortex A57 | (1) Quad-core ARM Cortex A57 (2) Dual-core Nvidia Denver2 | Octa-core ARM V8.2 | Quad-core ARM Cortex-A53 | - |
| Clock Speed | 1.43 GHz | 2 GHz | 2.265 GHz | 1.5 GHz | 700 MHz (Processor Base Frequency) |
| Accelerator Hardware | 128 Nvidia Maxwell GPU | 256 Nvidia Pascal GPU | (1) 512-Nvidia Volta GPU with 64 Tensor Cores (2) 2 × NVDLA v1 | Google Edge TPU Accelerator | Intel Movidius Myriad × VPU 4 GB |
| Operating Systems | Linux4Tegra | Linux4Tegra | Linux4Tegra | Debian Linux | (1) OS Independent (2) OpenVINO toolkit |
| Power Required | 5–10 watt | 7.5–15 watt | 10–15 watt | 10–15 watt | - |
| Device | Augmentation | Input Size | mAP (%) | FPS | Memory (GB) | Power (W) |
|---|---|---|---|---|---|---|
| GPU | No | 640 × 364 × 3 | 97 | 65 | 1.4 | 45 |
| 300 × 300 × 3 | 94 | 103 | 1.2 | 45 | ||
| Yes | 640 × 364 × 3 | 99 | 65 | 1.4 | 45 | |
| 300 × 300 × 3 | 95 | 103 | 1.2 | 45 | ||
| Xavier | Yes | 640 × 364 × 3 | 90 | 27 | 3.3 | 5.8 |
| 300 × 300 × 3 | 86 | 51 | 2.7 | 5.1 |
| Model | Parameters | GFLOPS | mAP |
|---|---|---|---|
| YoloV5 Extra Large | 87.7 M | 218.8 | 99.458 |
| YoloV5 Large | 47.0 M | 115.4 | 99.447 |
| YoloV5 Medium | 21.4 M | 51.3 | 99.437 |
| YoloV5 Small | 7.3 M | 17.0 | 99.434 |
| YoloV5 Custom | 32 k | 1.0 | 98.975 |
| Model | Input Size | mAP | FPS |
|---|---|---|---|
| YoloV3 | 640 × 364 × 3 | 0.89 | 21 |
| SSDLite Mobilenet V2 | 300 × 300 × 3 | 0.96 | 60 |
| SSD InceptionV2 | 300 × 300 × 3 | 0.94 | 60 |
| SSD Mobilenet V2 | 640 × 364 × 3 | 0.97 | 60 |
| YoloV5 | 640 × 364 × 3 | H | H |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akhtar, A.; Ahmed, R.; Yousaf, M.H.; Velastin, S.A. Real-Time Motorbike Detection: AI on the Edge Perspective. Mathematics 2024, 12, 1103. https://doi.org/10.3390/math12071103
Akhtar A, Ahmed R, Yousaf MH, Velastin SA. Real-Time Motorbike Detection: AI on the Edge Perspective. Mathematics. 2024; 12(7):1103. https://doi.org/10.3390/math12071103
Chicago/Turabian StyleAkhtar, Awais, Rehan Ahmed, Muhammad Haroon Yousaf, and Sergio A. Velastin. 2024. "Real-Time Motorbike Detection: AI on the Edge Perspective" Mathematics 12, no. 7: 1103. https://doi.org/10.3390/math12071103
APA StyleAkhtar, A., Ahmed, R., Yousaf, M. H., & Velastin, S. A. (2024). Real-Time Motorbike Detection: AI on the Edge Perspective. Mathematics, 12(7), 1103. https://doi.org/10.3390/math12071103