1. Introduction
As the number of personal vehicles in use worldwide surges, this trend has not only intensified climate change but also led to increased congestion within major urban regions, making urban air mobility an emerging market for aerial transportation systems [
1,
2]. Flying cars, especially electric vertical takeoff and landing (eVTOL) vehicles, with their zero-emission advantage, are considered an innovative solution to address future urban traffic congestion and environmental issues [
3,
4]. However, the design and implementation of eVTOL vehicles face various challenges, one of which is their size limitation. Due to the complexity and spatial constraints of urban environments, the size of eVTOL vehicles needs to be meticulously designed to ensure they can fit into parking spaces [
5]. Therefore, developing compact flying car designs suitable for urban environments is a key task.
The coaxial contra-rotating propellers comprise two closely positioned propellers that rotate in opposite directions around the same axis. This configuration is designed to achieve higher propulsion speeds and superior thrust efficiency compared to using a single propeller [
6,
7]. Based on this advantage, coaxial counter rotating propellers have been widely used in the field of unmanned aerial vehicles (UAV) [
8,
9]. As the core component of the lift system for eVTOL vehicles, the aerodynamic performance of coaxial counter-rotating propellers plays a decisive role in the overall performance and safety of eVTOL vehicles [
10]. Therefore, a deep understanding and accurate simulation of the aerodynamic interactions between coaxial counter-rotating propellers and the precise evaluation of their aerodynamic performance are crucial factors that need to be considered in the design process of eVTOL vehicles.
eVTOL vehicles are an innovative mode of transportation. Although the design technology of eVTOL vehicles is rapidly advancing, conducting low-cost, efficient, and high-precision quantitative analysis of the aerodynamic performance of the coaxial contra-rotating propeller lift system remains a challenge in the design process of eVTOL vehicles. eVTOL vehicles often require a significant investment of time and money in the verification process before they can be officially put into operation. Previous development commonly adopted a method of repeated iterations of prototype design and testing, a practice that not only consumed a considerable amount of time but also incurred high costs [
11]. With the theoretical development of the propeller design field, analysis methods such as the blade element theory (BET), the blade element momentum theory (BEMT), or the free vortex method (FVM) have been considered as reliable methods for the design and performance testing of propellers due to their high speed [
12,
13,
14,
15,
16]. However, this method requires input parameters in the experiment to produce accurate results, making it difficult to use them to accurately evaluate new designs without additional experimental research. Given the complexity of aerodynamic interactions in coaxial counter-rotating propellers, traditional analysis methods often fall short in capturing the intricate flow dynamics and providing accurate performance predictions. This limitation underscores the need for more advanced and precise tools. Computational fluid dynamics (CFD) methods, due to their extensive modeling capabilities and accurate verification methods, are increasingly being explored by researchers for their application in propeller design and analysis. The CFD approach, through numerical simulation techniques, enables the precise prediction of the aerodynamic characteristics of propellers, avoiding repetitive experiments and modifications common in traditional prototype testing. Moreover, CFD methods also provide more in-depth flow field analysis, offering robust support for the optimization of the lift system in eVTOL vehicles. Mohamed [
17] conducted a study on the slotted propeller design for different airfoils using the MRF method in CFD to improve the aerodynamic performance of small propellers. Dubbioso [
18] assessed the performance of marine propellers under off-design conditions, focusing on hydrodynamic loads and pressure distribution on the blades. Liu [
19] systematically analyzed the aerodynamic performance of the APC1045 multi-rotor propeller through wind tunnel tests, blade element momentum theory, and CFD methods, exploring the limitations and advantages of these three methods. Oktay [
20] used the overlapping grid method in CFD to investigate the relationship between the airspeed and thrust coefficient of a quad-rotor UAV propeller, with the results indicating that the thrust coefficient decreases at higher airspeeds. Rajendran [
21] conducted a numerical simulation analysis to investigate the effects of blade angle on the torque generated by twin-blade propellers and developed a twin-blade propeller model with improved torque and performance coefficient. Trimulyono [
22] studied the effect of installing propeller boss cap fins on propeller performance using the CFD method. Additionally, Trimulyono [
23] also employed the model variation analysis method to study the optimum thrust value of the propeller, as well as the thrust values generated by variations in angle and number of blades. Fitriadhy [
24] studied the thrust, torque, and efficiency coefficients of propellers with different blade numbers in open-water conditions using the CFD method. Guo [
25] used CFD and system-based methods to study the turning maneuver behavior and hydrodynamic characteristics of twin-screw ships considering hull-engine-propeller interaction, but the research object was different from the aerodynamic characteristics of coaxial contra-rotating propellers discussed in this paper.
However, the CFD simulation in the above research is all for single propeller, and the aerodynamic interaction of coaxial counter-rotating propeller used in eVTOL vehicles is extremely complex [
26], especially the impact of the downwash generated by the upper propeller on the lower propeller, which makes the aerodynamic performance of this lift system exhibit complex and variable characteristics, which are difficult to predict directly [
27]. Sugawara [
28] studied a CFD numerical simulation method combined with balance analysis. Through the balance analysis loosely coupled with the CFD solver, the blade pitch angles of the upper and lower rotors were adjusted to meet the target balance conditions. Wang [
29] simulated the aerodynamic characteristics of coaxial propellers within a duct for eVTOL aircraft by establishing a sliding mesh model, analyzing the lift and torque of the ducted coaxial propellers at different speeds. However, the structure of the lift system differs from that presented in this paper. Lei [
30] and Park [
31], respectively, employed the sliding mesh and the overset mesh to analyze the impact of rotor spacing on the aerodynamic characteristics, thrust, and power consumption of coaxial propellers through numerical simulation. These results demonstrated the variations in rotor interference and thrust coefficient with increasing rotor spacing. However, the main focus of their research was not the analysis of lift losses and torque changes at different rotational speeds. Vijayanandh [
32] studied the cumulative thrust of the coaxial propeller in compact size, and the thrust and stability are optimized by modifying the distance between coaxial propellers. Cornelius [
33] developed a blade-resolved approach using mixing plane boundaries to analyze the aerodynamic performance of multi-rotor UAV systems, achieving a reduction in computational time and grid cell count by
and
, respectively.
Currently, the numerical simulation studies of coaxial propellers are mostly focused on spacing optimization, while the quantitative analysis of lift loss and torque variation at different rotational speeds, as well as coaxial interference analysis, are still insufficient. In the design optimization process of eVTOL vehicles, considering both the total lift loss and torque variation is essential to ensure high performance and safety. Insufficient consideration of lift loss could lead to the design of eVTOL vehicles that fail to meet expected performance standards, such as specific payload requirements or flight altitude limitations. Meanwhile, in the ideal case of coaxial counter-rotating propellers, the torque generated by the upper and lower propellers should be balanced to achieve mutual cancellation [
34,
35]. If the variation in torque is not adequately assessed, it may lead to undesirable rotations or oscillations of the aircraft, increasing uncertainty and risk during flight. Therefore, an efficient research method for studying the lift loss and torque variation of coaxial counter-rotating propellers at different rotational speeds is crucial for the design process of eVTOL vehicles.
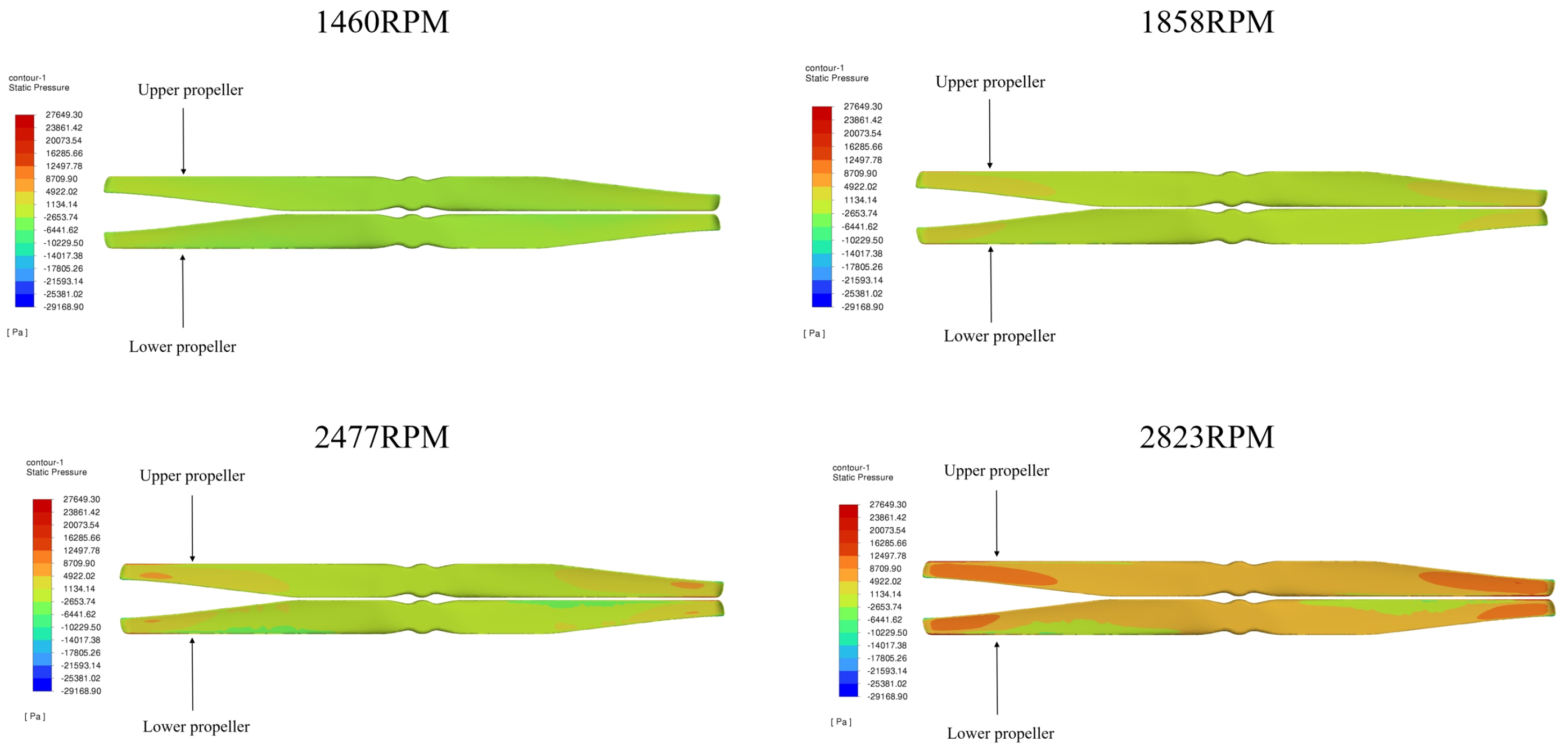
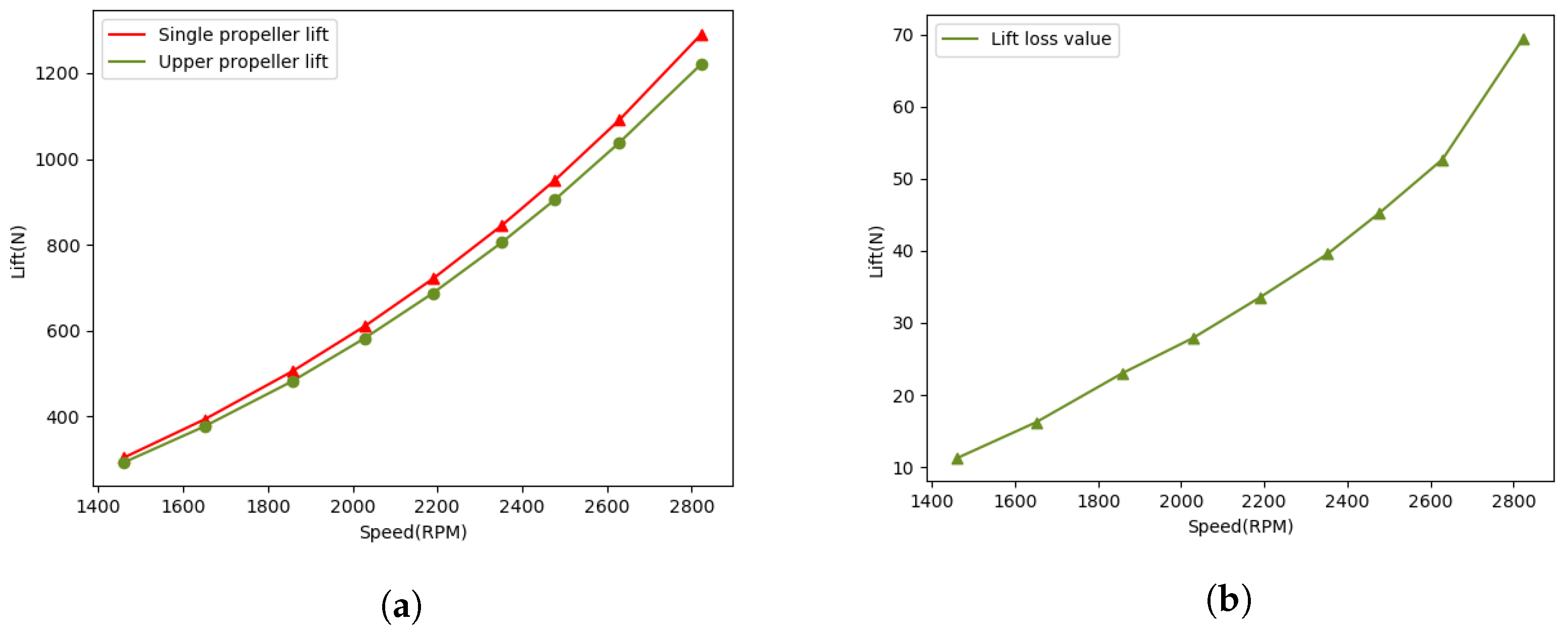
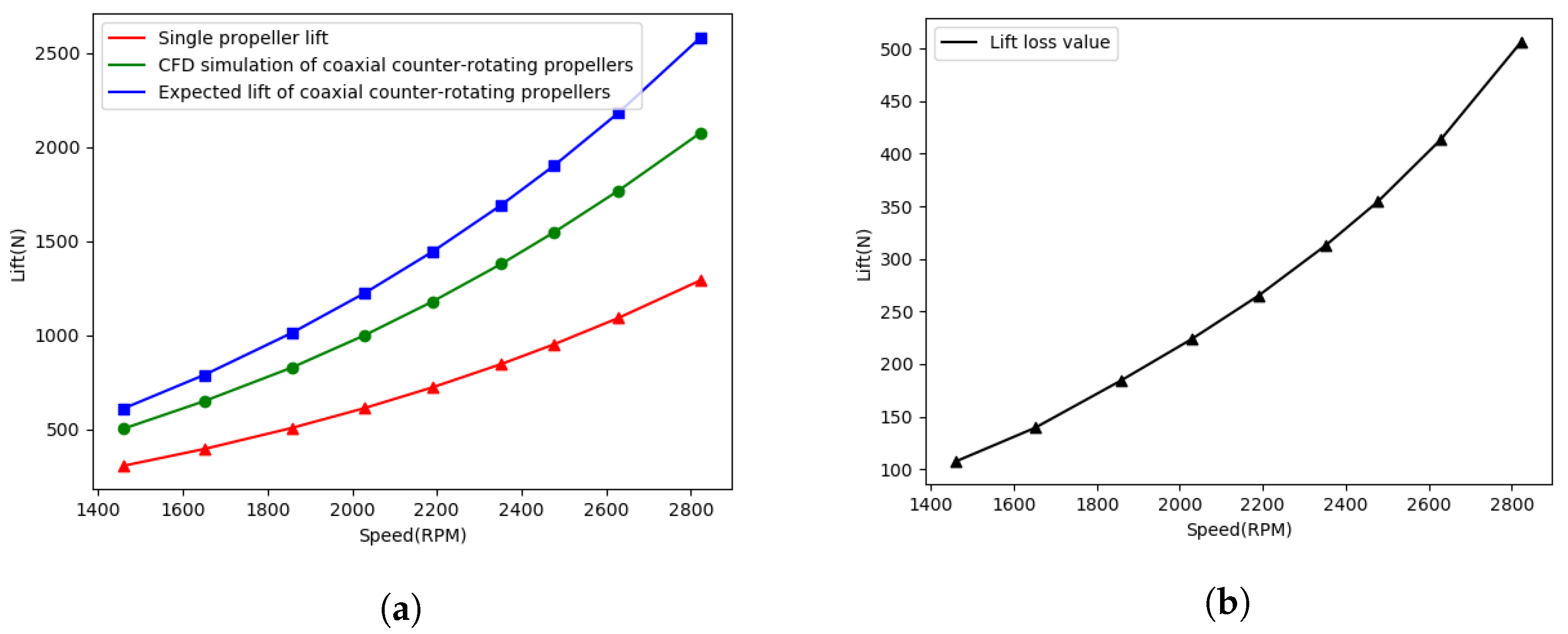
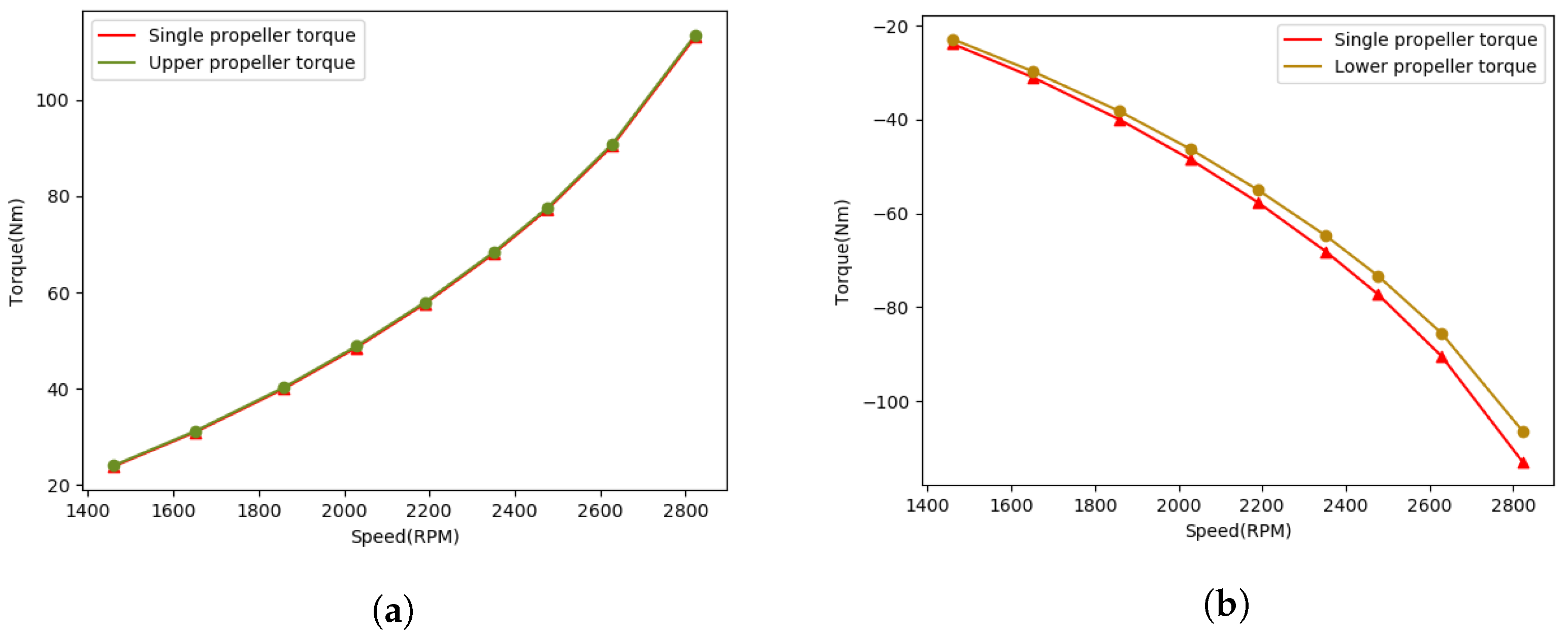
In response to the challenges identified in the design optimization of eVTOL vehicles, this article employs the MRF method in CFD technology to numerically simulate the lift system, providing a detailed analysis of the impact of the upper propeller’s wake flow field on the aerodynamic performance of the lower propeller. Additionally, it quantitatively analyzes the lift loss and torque variation of the coaxial counter-rotating propellers under different rotational speed conditions. This method does not require any hardware, making it a virtual test for the lift system of eVTOL vehicles, which can be used to estimate the dynamic loads on the lift system. This approach can serve as an important reference for performance optimization and safety during the design process of eVTOL vehicles.
2. Problem Statement
Figure 1 presents the quad-rotor, octa-propeller configuration of the flight system for the flying car discussed in this paper. This configuration not only provides ample power for the flight of the flying car but also meets the safety requirements of power redundancy. The flying car’s expanded dimensions are 2605 mm in length, 2047 mm in width, and 2012 mm in height. The power system of the aircraft consists of 24 distributed 12S44 Ah battery packs, arranged atop the vehicle’s body, which is advantageous for heat dissipation and enhancing the vehicle’s center of gravity, thereby reducing the moment of inertia and easing the operation difficulty. The fixed mass of the flying car is as shown in
Table 1, which includes specific hardware components and core mechanical parts. The total weight of this part remains essentially constant, whereas the quantity or materials of other components not listed in the table can be adjusted according to requirements.
Following the design criteria for the flying car outlined above, this study delves into the power system of the flying car. Considering the high payload requirements and the need for a compact airframe in practical applications, the traditional method of increasing propeller size to enhance lift is no longer viable. Therefore, this research employs a coaxial counter-rotating propeller system designed to provide greater lift without significantly increasing the dimensions of the flying car.
For a quadrotor unmanned aerial vehicle (UAV) with inter-axial angles set at
and propeller sizes of 67 inches, the body’s axis radius
R is related to the maximum rotor radius
as follows:
where
∼
,
is the propeller radius, and its value is 850.9 mm. This yields
values between 893.45 mm and 1021.08 mm. Consequently, the range of
R extends from 1263.4 mm to 1443.81 mm.
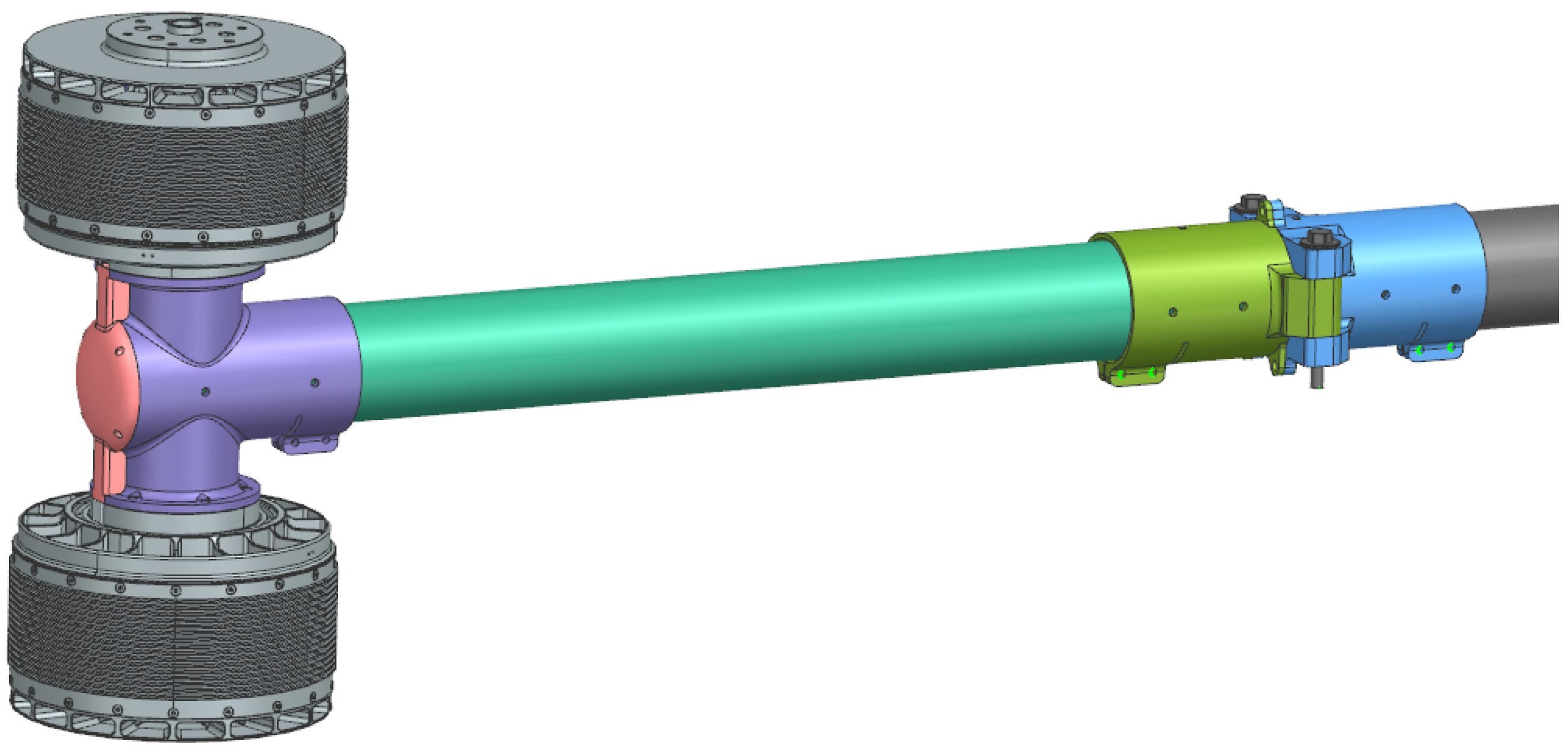
The motor model is EA200, with external dimensions of
. The propeller arm assembly consists of the arm fixture, carbon tube, and motor mount, as illustrated in
Figure 2. The arms can be regarded as cantilever beams. In this study, the distance between the two propellers is set at 420 mm.
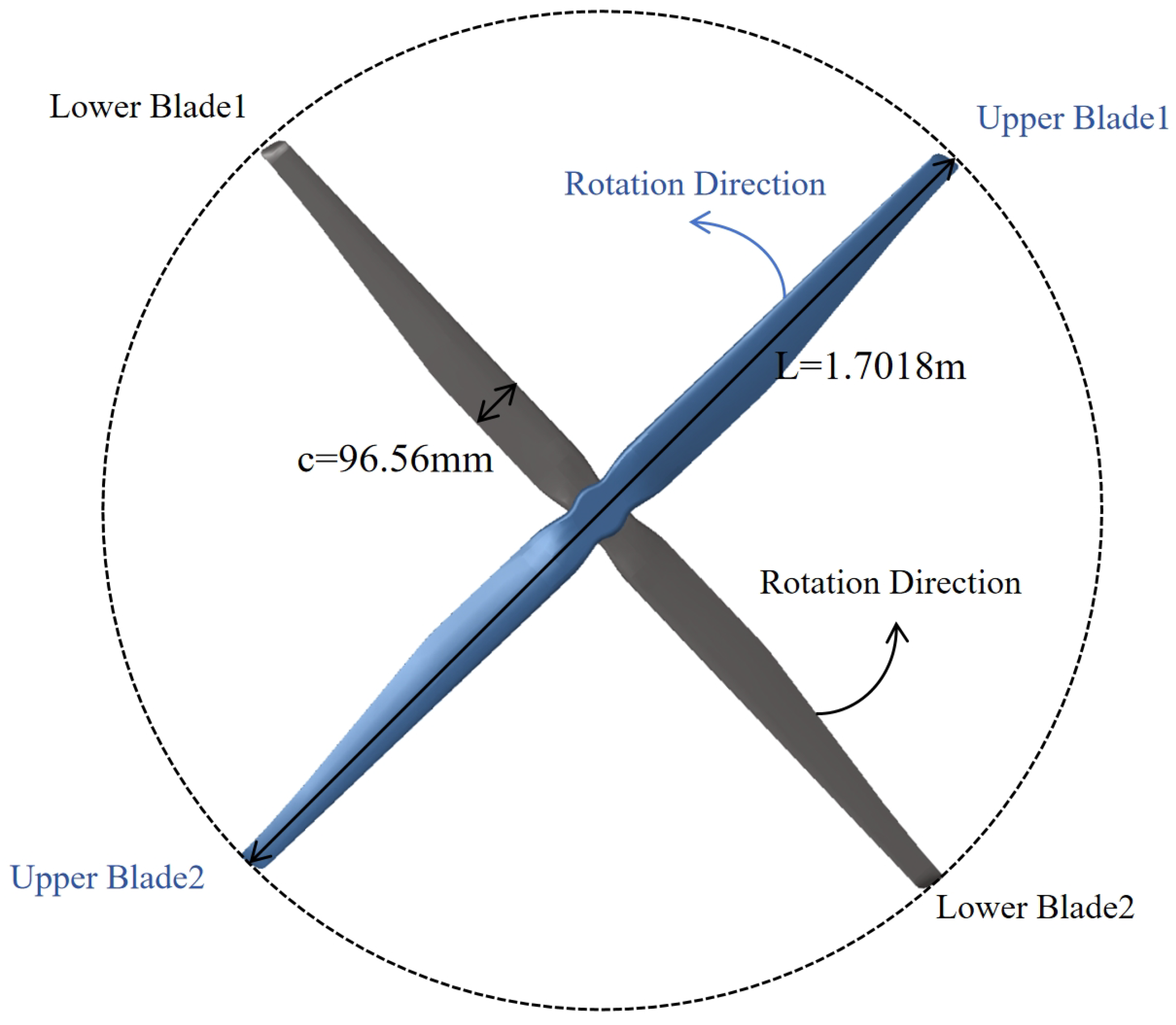
This paper primarily investigates a set of coaxial contra-rotating propellers within the lift system, utilizing coaxial contra-rotating propellers as shown in
Figure 3, which consist of two propellers rotating in opposite directions. In the lift system of the flying car, there are two sets of coaxial contra-rotating propellers whose rotation direction is the same as that shown in
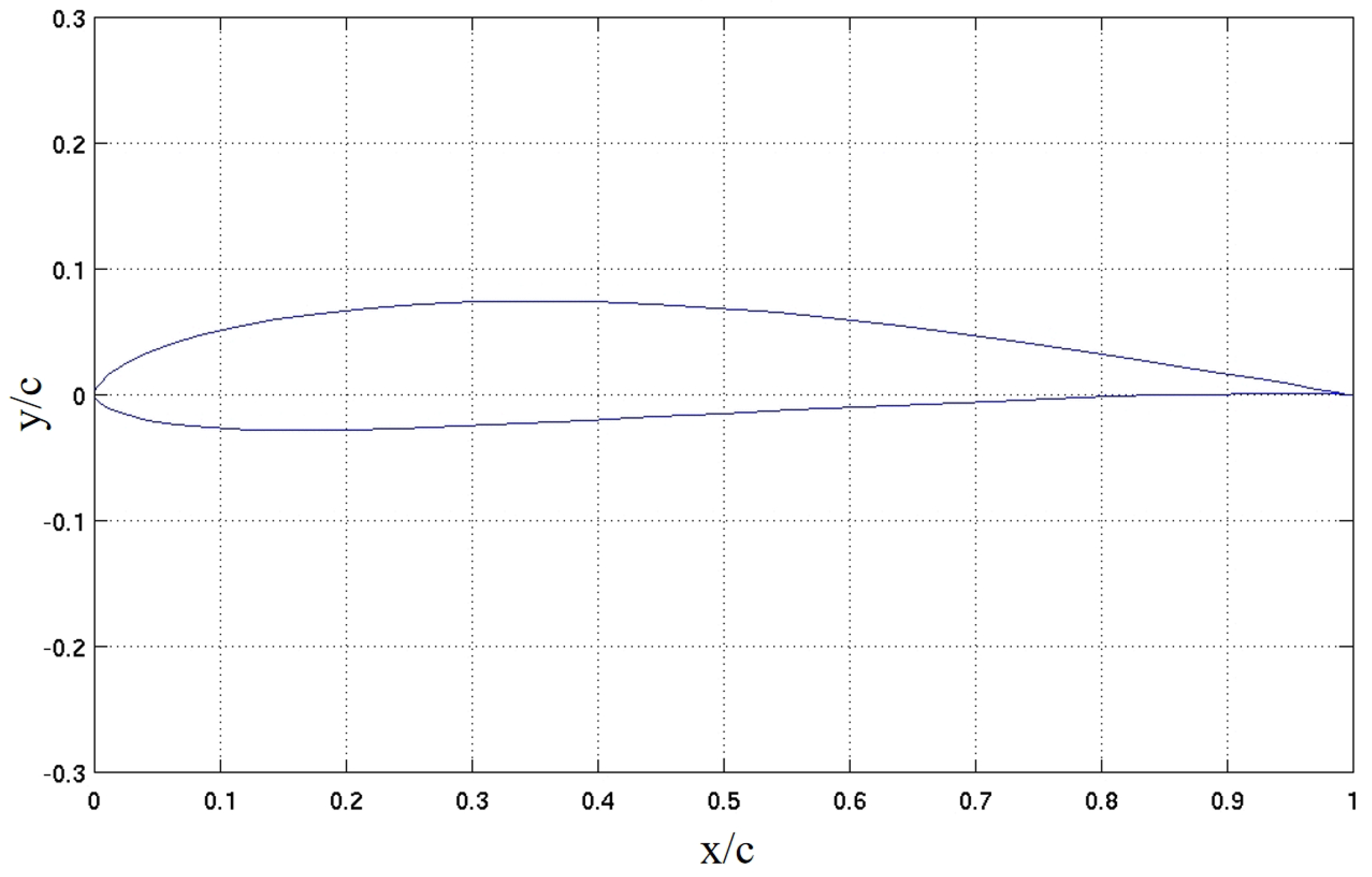
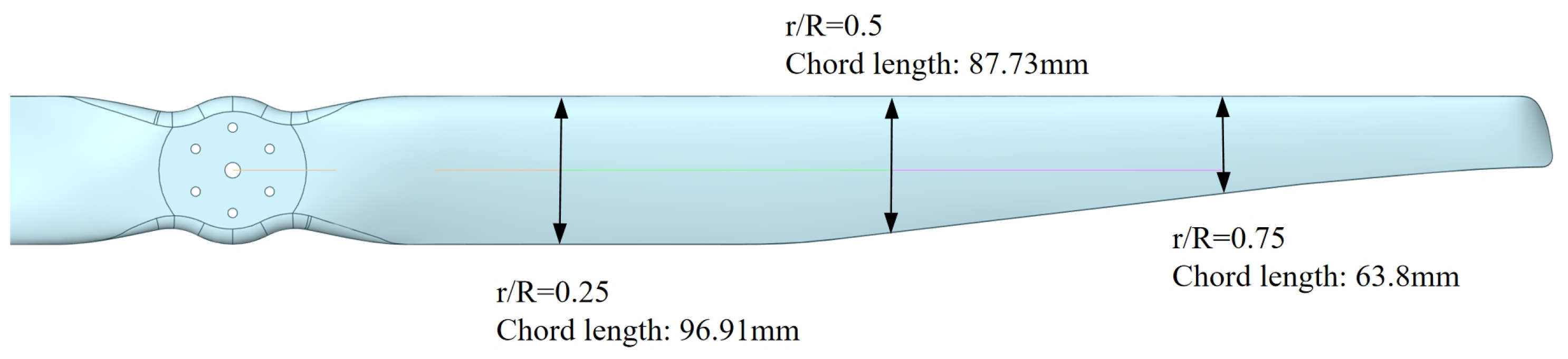
Figure 3, while the other two sets utilize propellers with the opposite rotation direction. The propeller is designed with mh117 basic airfoil as shown in
Figure 4, and the detailed dimensions are shown in
Figure 5. The parameters related to the coaxial counter-rotating propellers are presented in
Table 2.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}