
Clustering Component Synchronization of Nonlinearly Coupled Complex Networks via Pinning Control

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- The inner coupling of the complex networks studied in this paper is nonlinear, which is more realistic since the observed data are usually a nonlinear function of the state variable rather than itself.
- (2)
- The coupling matrix of the complex network investigated in this paper is asymmetric, which means that the complex network is directed. Moreover, the intrinsic dynamics of the nodes are uniform within a cluster but not the same in different ones. Therefore, the complex network under investigation in this paper is more in line with reality.
- (3)
- The synchronization investigated in this paper is clustering component synchronization, which is concerned with the asymptotic convergence of specified components of the node’s state variables in each cluster of the network rather than all components. When the specified components are all state components, clustering component synchronization becomes cluster synchronization in general. Hence, compared with traditional cluster synchronization investigated in [24,26], clustering component synchronization has more potential applications.
2. Preliminaries
- (1)
- is symmetric;
- (2)
- is symmetric;
- (3)
- (4)
3. Main Results
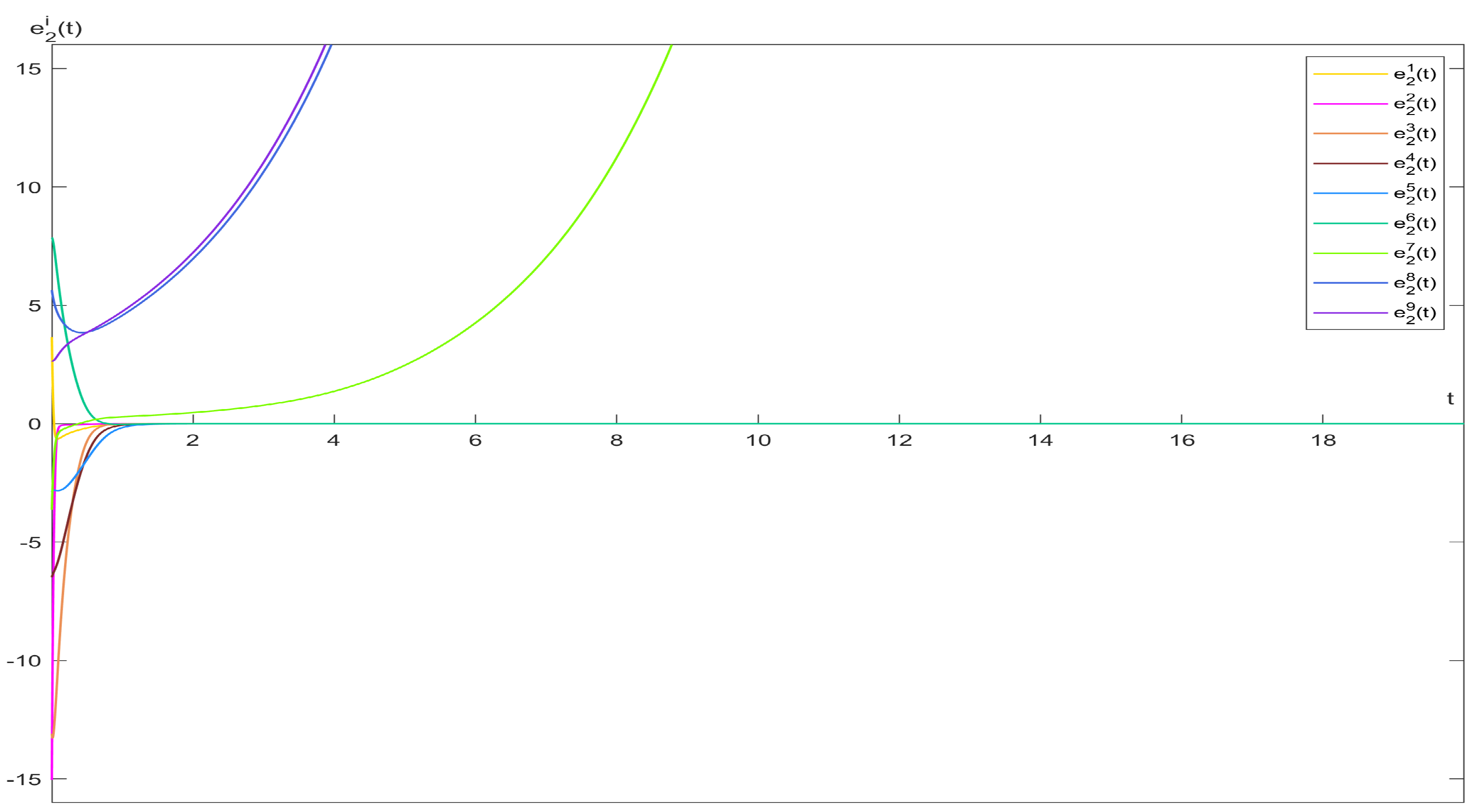
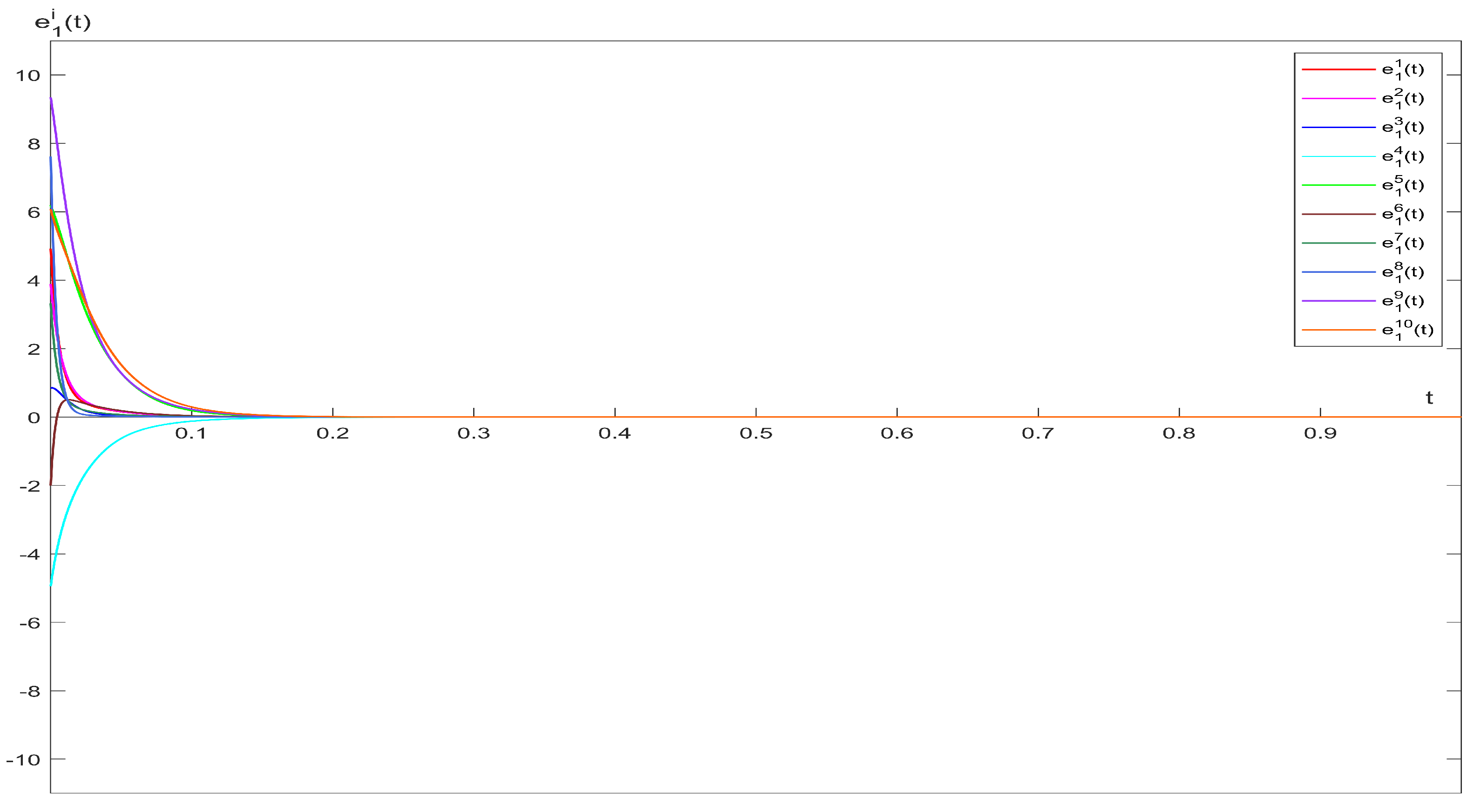
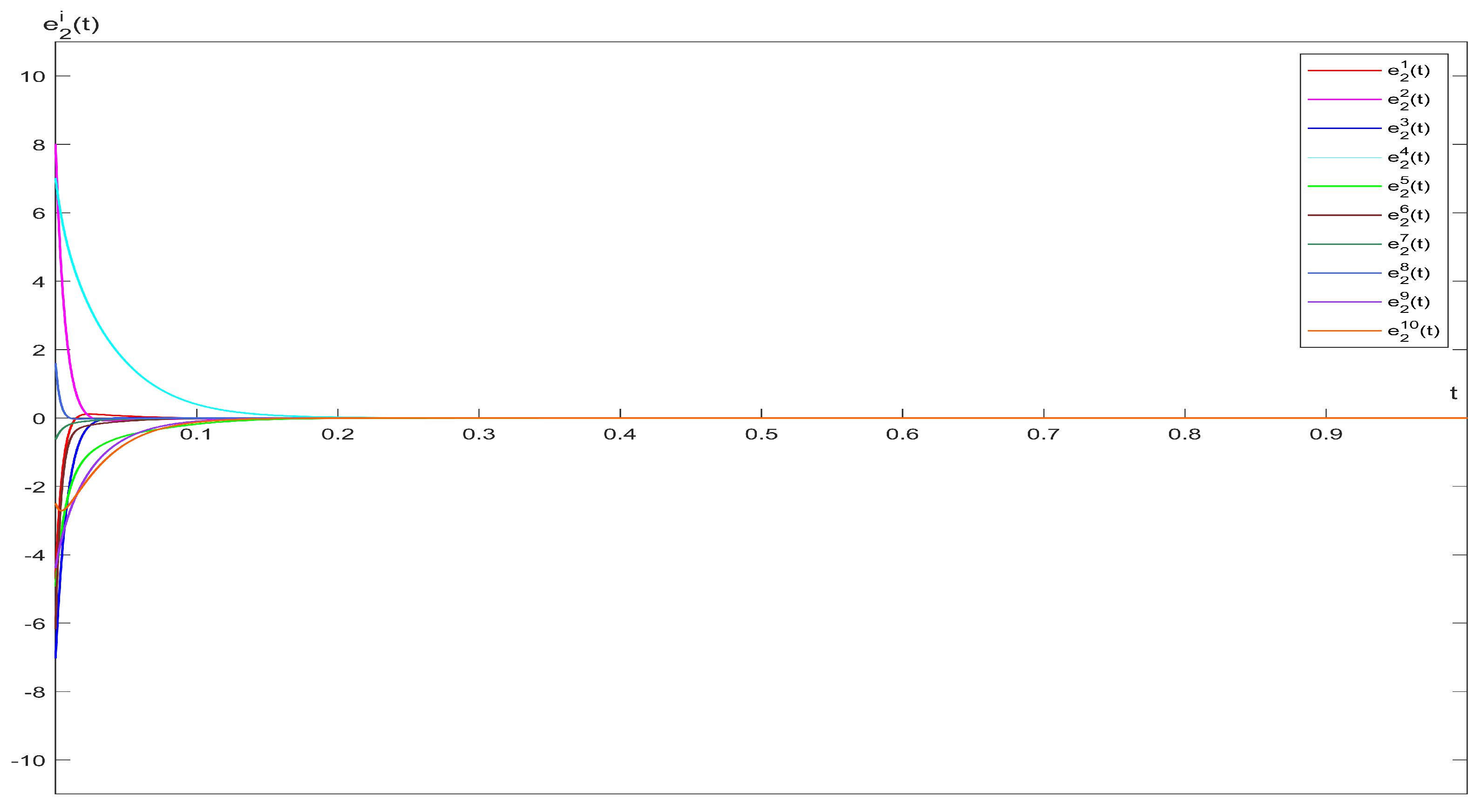
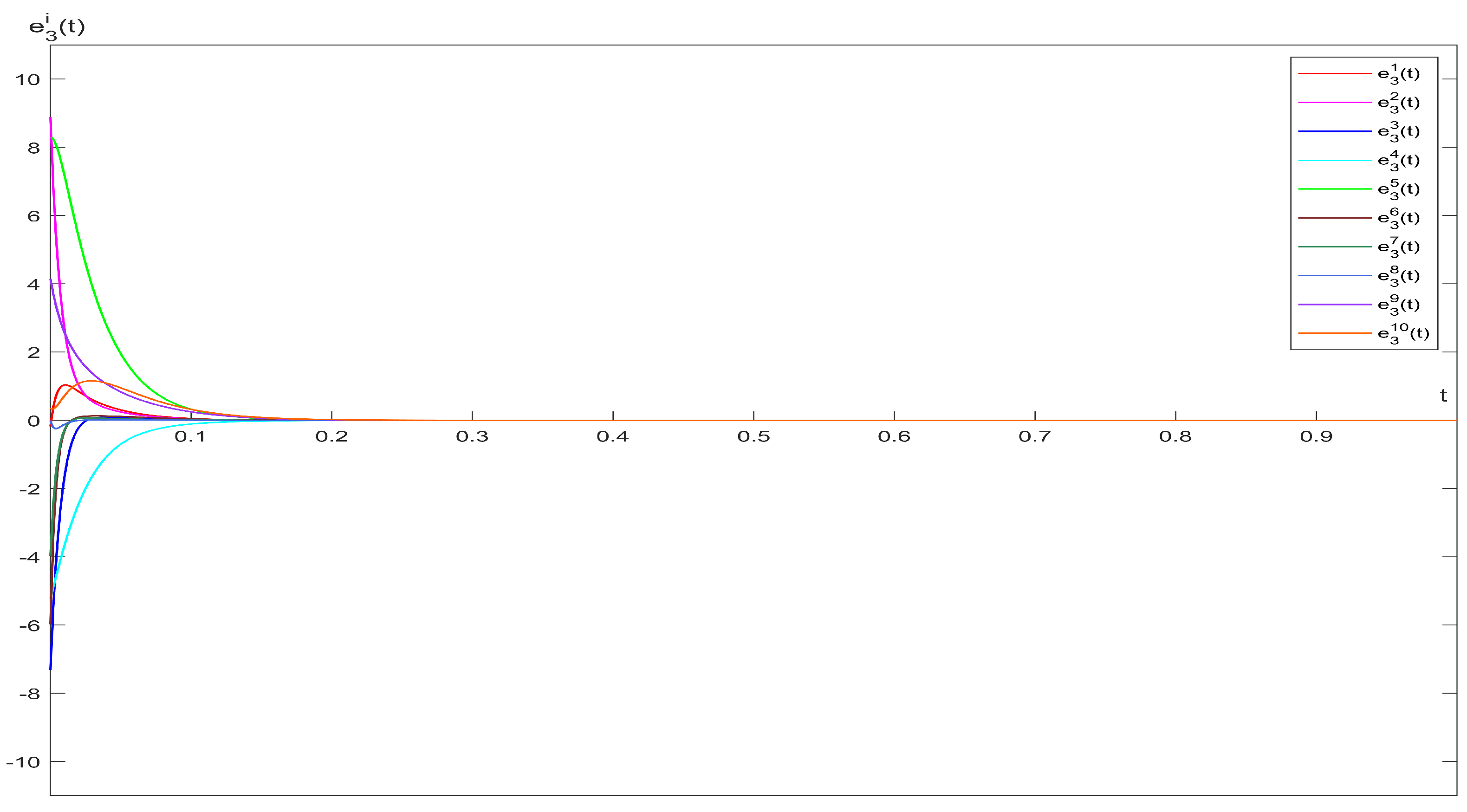
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, X.; Chen, T. Synchronization analysis for nonlinearly-coupled complex networks with an asymmetrical coupling matrix. Phys. A Stat. Mech. Appl. 2008, 387, 4429–4439. [Google Scholar] [CrossRef]
- Zhang, L.; Lei, Y.; Wang, Y.; Chen, H. Generalized outer synchronization between non-dissipatively coupled complex networks with different-dimensional nodes. Appl. Math. Model. 2018, 55, 248–261. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, J.; Lu, J.; Lou, J. Finite-time synchronization of complex networks with partial communication channels failure. Inf. Sci. 2023, 634, 539–549. [Google Scholar] [CrossRef]
- Abdurahman, A.; Abudusaimaiti, M.; Jiang, H. Fixed/predefined-time lag synchronization of complex-valued BAM neural networks with stochastic perturbations. Appl. Math. Comput. 2023, 444, 127811. [Google Scholar] [CrossRef]
- Syed Ali, M.; Stamov, G.; Stamova, I.; Ibrahim, T.F.; Dawood, A.A.; Osman Birkea, F.M. Global asymptotic stability and synchronization of fractional-order reaction–diffusion fuzzy BAM neural networks with distributed delays via hybrid feedback controllers. Mathematics 2023, 11, 4248. [Google Scholar] [CrossRef]
- Liang, Y.; Deng, Y.; Zhang, C. Outer synchronization of two muti-layer dynamical complex networks with intermittent pinning control. Neural Netw. 2023, 11, 3543. [Google Scholar] [CrossRef]
- Kumar, A.; Das, S.; Singha, S.; Rajeev. Quasi-projective synchronization of inertial complex-valued recurrent neural networks with mixed time-varying delay and mismatched parameters. Chaos Solitons Fractals 2023, 166, 112948. [Google Scholar] [CrossRef]
- Wei, C.; Wang, X.; Hui, M.; Zeng, Z. Quasi-synchronization of fractional multiweighted coupled neural networks via aperiodic intermittent control. IEEE Trans. Cybern. 2024, 54, 1671–1684. [Google Scholar] [CrossRef]
- Liu, X.; Chen, T. Cluster synchronization in directed networks via intermittent pinning control. IEEE Trans. Neural Netw. 2011, 22, 1009–1020. [Google Scholar] [CrossRef]
- Li, K.; Zhou, J.; Yu, W.; Small, M.; Fu, X. Adaptive cluster synchronization in networks with time-varying and distributed coupling delays. Appl. Math. Model. 2014, 38, 1300–1314. [Google Scholar] [CrossRef]
- Zhou, L.; Wang, C.; Du, S.; Zhou, L. Cluster synchronization on multiple nonlinearly coupled dynamical subnetworks of complex networks with nonidentical nodes. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 570–583. [Google Scholar] [CrossRef]
- Liu, P.; Zeng, Z.; Wang, J. Asymptotic and finite-time cluster synchronization of coupled fractional-order neural networks with time delay. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4956–4967. [Google Scholar] [CrossRef]
- Della Rossa, F.; Pecora, L.; Blaha, K.; Shirin, A.; Klickstein, I.; Sorrentino, F. Symmetries and cluster synchronization in multilayer networks. Nat. Commun. 2020, 11, 3179. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, Z. Cluster synchronization in variable-order fractional community network via intermittent control. Mathematics 2021, 9, 2596. [Google Scholar] [CrossRef]
- Wang, X.; Zhai, S.; Luo, G.; Huang, T. Cluster synchronization in a network of nonlinear systems with directed topology and competitive relationships. Appl. Math. Comput. 2022, 421, 126931. [Google Scholar] [CrossRef]
- Tong, L.; Liang, J.; Liu, Y. Generalized cluster synchronization of Boolean control networks with delays in both the states and the inputs. J. Frankl. Inst. 2022, 359, 206–223. [Google Scholar] [CrossRef]
- Lu, B.; Jiang, H.; Hu, C.; Abdurahman, A.; Liu, M. Adaptive pinning cluster synchronization of a stochastic reaction-diffusion complex network. Neural Netw. 2023, 166, 524–540. [Google Scholar] [CrossRef]
- Zhai, S.; Wang, X.; Zheng, Y. Cluster synchronization of a nonlinear network with fixed and switching topologies. IEEE Syst. J. 2023, 17, 3752–3761. [Google Scholar] [CrossRef]
- Liu, L.; Zhou, W.; Huang, C. Finite/Prescribed-time cluster synchronization of complex dynamical networks with multiproportional delays and asynchronous switching. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 3683–3694. [Google Scholar] [CrossRef]
- Zhai, S.; Zheng, W.X. Stability conditions for cluster synchronization in directed networks of diffusively coupled nonlinear systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2023, 70, 413–423. [Google Scholar] [CrossRef]
- Lin, L.; Cao, J.; Liu, X.; Lu, G.; Abdel-Aty, M. Cluster synchronization of finite-field networks. IEEE Trans. Cybern. 2024, 54, 635–640. [Google Scholar] [CrossRef]
- Hui, M.; Liu, X.; Zhu, S.; Cao, J. Event-triggered impulsive cluster synchronization of coupled reaction–diffusion neural networks and its application to image encryption. Neural Netw. 2024, 170, 46–54. [Google Scholar] [CrossRef]
- Wang, X.F.; Chen, G. Pinning control of scale-free dynamical networks. Phys. A Stat. Mech. Appl. 2002, 310, 521–531. [Google Scholar] [CrossRef]
- Wu, W.; Zhou, W.; Chen, T. Cluster synchronization of linearly coupled complex networks under pinning control. IEEE Trans. Circuits Syst. I Regul. Pap. 2009, 56, 829–839. [Google Scholar] [CrossRef]
- Feng, J.; Wang, J.; Xu, C.; Austin, F. Cluster synchronization of nonlinearly coupled complex networks via pinning control. Discret. Dyn. Nat. Soc. 2011, 2011, 262349. [Google Scholar] [CrossRef]
- Wang, Y.; Ma, Z.; Cao, J.; Alsaedi, A.; Alsaadi, F.E. Adaptive cluster synchronization in directed networks with nonidentical nonlinear dynamics. Complexity 2016, 21, 380–387. [Google Scholar] [CrossRef]
- Li, L.; Ho, D.W.C.; Cao, J.; Lu, J. Pinning cluster synchronization in an array of coupled neural networks under event-based mechanism. Neural Netw. 2016, 76, 1–12. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, W.; Karimi, H.R.; Sun, Y. Finite- and fixed-time cluster synchronization of nonlinearly coupled delayed neural networks via pinning control. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 5222–5231. [Google Scholar] [CrossRef]
- Yang, Q.; Wu, H.; Cao, J. Pinning exponential cluster synchronization for fractional-order complex dynamical networks with switching topology and mode-dependent impulses. Neurocomputing 2021, 428, 182–194. [Google Scholar] [CrossRef]
- Liu, L.; Ding, X.; Zhou, W. Prescribed-time cluster synchronization of uncertain complex dynamical networks with switching via pinning control. Neurocomputing 2021, 419, 136–147. [Google Scholar] [CrossRef]
- Wang, J.; Liu, X. Cluster synchronization for multi-weighted and directed complex networks via pinning control. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1347–1351. [Google Scholar] [CrossRef]
- Fan, H.; Shi, K.; Zhao, Y. Pinning impulsive cluster synchronization of uncertain complex dynamical networks with multiple time-varying delays and impulsive effects. Phys. A Stat. Mech. Appl. 2022, 587, 126534. [Google Scholar] [CrossRef]
- Wei, J.; Zhang, C.; Guo, Y.; Wang, F. Cluster synchronization of stochastic two-layer delayed neural networks via pinning impulsive control. J. Appl. Math. Comput. 2024, 2024, 1–18. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, Y.; Li, J.; Liu, M. Distributed fault-tolerant pinning control for cluster synchronization of multiple unmanned surface vehicles. Ocean Eng. 2024, 296, 116882. [Google Scholar] [CrossRef]
- Wu, B.; Ma, Z.; Wang, Y. Partial component consensus of leader-following multi-agent systems. Acta Phys. Sin. 2017, 66, 060201. [Google Scholar] [CrossRef]
- Li, F.; Ma, Z.; Duan, Q. Partial component synchronization on chaotic networks. Phys. A Stat. Mech. Appl. 2019, 515, 707–714. [Google Scholar] [CrossRef]
- Li, F.; Ma, Z.; Duan, Q. Clustering component synchronization in a class of unconnected networks via pinning control. Phys. A Stat. Mech. Appl. 2019, 525, 394–401. [Google Scholar] [CrossRef]
- Hu, W.; Zhang, W.; Ma, Z.; Li, K. Partial component consensus analysis of second-order and third-order nonlinear multi-agent systems. Phys. A Stat. Mech. Appl. 2022, 593, 126857. [Google Scholar] [CrossRef]
- Wang, Y.; Song, H.; Chen, G.; Ma, Z.; Cao, J. p components of cluster-lag consensus for second-order multiagent systems with adaptive controller on cooperative-competitive networks. IEEE Trans. Cybern. 2023, 53, 2852–2863. [Google Scholar] [CrossRef]
- Liao, X. Mathematical Theory of Stability and Its Application; Central China Normal University Press: Wuhan, China, 2001. [Google Scholar]
- Wu, J.; Jiao, L. Synchronization in complex delayed dynamical networks with nonsymmetric coupling. Phys. A Stat. Mech. Appl. 2007, 386, 513–530. [Google Scholar] [CrossRef]
- Wu, C.W.; Chua, L.O. Synchronization in an array of linearly coupled dynamical systems. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1995, 42, 430–447. [Google Scholar] [CrossRef]
- Lütkepohl, H. Handbook of Matrices; Wiley: New York, NY, USA, 1996. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Sun, J.-P. Clustering Component Synchronization of Nonlinearly Coupled Complex Networks via Pinning Control. Mathematics 2024, 12, 1022. https://doi.org/10.3390/math12071022
Liu J, Sun J-P. Clustering Component Synchronization of Nonlinearly Coupled Complex Networks via Pinning Control. Mathematics. 2024; 12(7):1022. https://doi.org/10.3390/math12071022
Chicago/Turabian StyleLiu, Jie, and Jian-Ping Sun. 2024. "Clustering Component Synchronization of Nonlinearly Coupled Complex Networks via Pinning Control" Mathematics 12, no. 7: 1022. https://doi.org/10.3390/math12071022
APA StyleLiu, J., & Sun, J.-P. (2024). Clustering Component Synchronization of Nonlinearly Coupled Complex Networks via Pinning Control. Mathematics, 12(7), 1022. https://doi.org/10.3390/math12071022