1. Introduction
Finding classes of structured matrices for which accurate computations can be assured has been a very active research field in recent years (cf. [
1,
2,
3,
4,
5,
6,
7]). The desired goal is to guarantee
high relative accuracy (HRA), and it has been achieved for the usual linear algebra computations only for a few classes of matrices. If an algorithm uses only additions of numbers of the same sign, multiplications, and divisions, on the assumption that each original real datum is known to HRA, then the output of that algorithm can be calculated with HRA (cf. [
2] p. 52). Furthermore, in well-implemented floating-point arithmetic, HRA is preserved even when performing true subtractions with original exact data (cf. p. 53 of [
2]). Therefore, an algorithm that only uses additions of numbers of the same sign, multiplications, divisions, and subtractions (additions of numbers of different sign) of the initial data ensures an output with HRA.
Among the sources of structured matrices for which HRA computations can be guaranteed are some subclasses of nonsingular, totally positive matrices. We say that a matrix is
totally positive (TP) whenever all its minors are non-negative (see [
8]). These matrices are also known as totally non-negative. TP matrices have been applied in many different fields (cf. [
9,
10,
11,
12]), including Approximation Theory, Statistics, Mechanics, Computer-Aided Geometric Design, Biomathematics, and Combinatorics, in addition to many other fields. A nonsingular TP matrix can be decomposed as a bidiagonal factorization, that is, it can be written as a product of bidiagonal matrices (see Chapter 7 of [
10]). If we can compute this factorization with HRA, then we can apply the algorithms of [
13] to perform many linear algebra computations with HRA, like the calculation of every eigenvalue, every singular value, and the inverse or solving some linear systems.
Many advantages of dealing with non-negative matrices are known. As recalled above, additional advantages can be obtained when dealing with TP matrices, in particular in the field of achieving HRA computations. In this paper, we show that the nice spectral properties of Perron–Frobenius theorems of non-negative matrices can be extended to some matrices with a special sign pattern. Analogously, we show how the HRA computations of some nonsingular TP matrices can be extended to some related classes of matrices with a special sign pattern.
The originality of the new results comes from the fact that this manuscript provides tools to identify new classes of matrices of different signs for which Perron–Frobenius-type theorems can be applied and for which high-relative-accuracy algorithms can be used. These matrices arise in Combinatorics, as shown in
Section 6, but also in Computer-Aided Geometric Design or in Approximation Theory.
The structure of the paper is the following:
Section 2 presents basic definitions, auxiliary results and the extension of Perron–Frobenius theorems to signed matrices.
Section 3 introduces bidiagonal decompositions and the class of checkerboard matrices, whose advantages for achieving HRA computations are presented in
Section 4.
Section 5 includes a result on intervals of checkerboard matrices.
Section 6 shows some examples of checkerboard matrices with integer entries whose bidiagonal decomposition can be extremely simple. Finally,
Section 7 includes numerical experiments illustrating the accuracy of our methods with respect to standard methods.
2. Definitions and Auxiliary Results
Given a matrix
A, we write
if all its entries are non-negative. Let us introduce the notation
for the set of strictly increasing sequences of
r positive integers, and let
. Then, we denote the
submatrix of
A that is formed by taking the rows numbered by
and the columns numbered by
as
. If
, submatrix
is a principal submatrix of
A, and it is written as
. The dispersion number,
, is defined for every
as
So,
consists of successive integers whenever
.
Given a non-negative integer r, let us denote by the set of sequences of r positive consecutive indices such that for .
Definition 1. We say that an infinite matrix has a block checkerboard sign pattern if for some positive integer r and all sequences of indices , we have thatLet us notice that the principal submatrices are non-negative for every . In Definition 1, the parameter
r describes the size of the sign blocks appearing in
B. For the case
, the sign structure of a block checkerboard pattern would be as follows:
We say that is a diagonal matrix if when . Hence, D can be represented in terms of its diagonal entries using the notation , where for .
The matrices introduced in Definition 1 have a particular block sign structure that can be captured using a sign matrix. Sign matrices are diagonal matrices such that . We will consider the particular case where . Then, we have the following characterization of infinite matrices with a block checkerboard sign pattern.
Proposition 1. Given an infinite matrix , B has a block checkerboard sign pattern with blocks of size if and only if is a non-negative matrix.
We can build finite matrices with a block checkerboard sign pattern by taking principal submatrices with consecutive indices from the infinite matrices given by Definition 2.
Definition 2. We say that is an r-checkerboard matrix if, given , for some sequence with and for some infinite matrix with a block checkerboard sign pattern given by (2). An r-checkerboard matrix A can be identified in terms of an sign matrix K. In this case, the sign matrix would be given by , where is the sequence of indices for which A satisfies Definition 2. For this sign matrix K, we have that as a consequence of Proposition 1. Thanks to this property, we can deduce, for r-checkerboard matrices, some analogous results to the well-known Perron–Frobenius theorems.
Theorem 1 (cf. p. 26 in [
14])
. If is a non-negative square matrix, then the following apply:- 1.
The spectral radius of A, , is an eigenvalue of A;
- 2.
A has a non-negative eigenvector that corresponds to .
Theorem 1 gives important information about non-negative matrices. For the case of r-checkerboard matrices, this result provides the following corollary.
Corollary 1. If is an r-checkerboard matrix with an associated sign matrix K, then the following apply:
- 1.
The spectral radius of A, , is an eigenvalue of A;
- 2.
A has an eigenvector v that corresponds to such that is non-negative.
Proof. Since , is an eigenvalue of by Theorem 1. The fact that implies that A and are similar matrices and that they have the same eigenvalues. Hence, is an eigenvalue of A. By condition 2 of Theorem 1, for a non-negative vector w. Hence, , and is an eigenvector corresponding to such that . □
3. Checkerboard Matrices and Bidiagonal Decomposition
In the previous section, we have seen that r-checkerboard matrices are similar to non-negative matrices thanks to sign matrices K. This relationship allowed us to deduce some spectral properties for r-checkerboard matrices. In this section, we will consider a stronger property, i.e., that is a nonsingular TP matrix. In that case, we obtain many interesting properties for this class of matrices, as well as the possibility of achieving accurate computations for solving many of the most common linear algebra problems with these matrices. The role of sign matrix K is fundamental. Let us start with the simplest case, which will showcase an important property of nonsingular TP matrices.
3.1. Checkerboard Pattern Matrices
Our first example of a sign matrix is
diagonal matrix
, that is, the matrix associated to an alternating sign pattern. If
A is a checkerboard pattern matrix, then matrix
is non-negative. For example, for the case
,
For the particular case where
is a nonsingular TP matrix, we have that
is also a nonsingular TP matrix (see Section 1 of [
8]).
3.2. Two-Block Checkerboard Matrices
Now, we are going to focus on the
-block case. Let us introduce sign matrix
. For example, for
, we have that
The sign structure associated to
is formed by alternating
blocks of entries with the same sign. A 2-checkerboard matrix
A with a block sign structure associated to
would be as follows:
Let us now define the counterpart to
, i.e., sign matrix
. For example, for
, it takes the form
Once again, the associated sign structure to
is formed by alternating
blocks of entries with the same sign (leaving the first row and column as special cases). Hence, a 2-checkerboard matrix
A with this pattern would be of the form
3.3. r-Block Checkerboard Matrices
Let us now extend the study to more general block structures: blocks with size . In this case, the sign matrix of an r-checkerboard matrix A takes the form for some , where t depends on sequence given by Definition 2. We are particularly interested in the case where r-checkerboard matrix A satisfies that is a nonsingular TP matrix. For this class of matrices, a parametrization that ensures computations with high relative accuracy is achieved through bidiagonal factorization.
Definition 3. Let be an r-checkerboard matrix such that for some . Then, we say that A is a -checkerboard matrix if is nonsingular TP.
In this case, we have r different sign structures depending on the size of the block appearing on the upper left-hand corner of the matrix.
3.4. Bidiagonal Decomposition and SBD Matrices
Now, we will introduce the representation of a matrix in terms of bidiagonal decomposition. This factorization gives a unique representation of a nonsingular TP matrix that can be used to achieve many computations with HRA with this class of matrices.
Theorem 2 (cf. Theorem 4.2 of Chapter 7 of [
10])
. Let A be a nonsingular TP matrix. Then, A admits factorization aswhere and , , are non-negative bidiagonal matrices defined byand with for . Moreover, if and fulfill the conditionsandthen the factorization defined by (5) and (6) is unique. The bidiagonal decomposition given by Theorem 2 represents a TP matrix in terms of
parameters. These parameters can be stored in an
matrix according to the notation introduced in [
15], where
represented the bidiagonal decomposition of nonsingular TP matrix
A:
Let us denote by
a vector whose entries are only
or
, that is,
with
for all
. This vector is called a
signature. Based on the sign structure defined by the signature, in [
16], a new class of matrices that admits a
signed bidiagonal decomposition was introduced as an extension of nonsingular TP matrices that admit a unique bidiagonal decomposition. This class was called SBD matrices.
Definition 4. Given a signature and a nonsingular matrix A, we say that A has a signed bidiagonal decomposition with signature ε if there exists a such that the following apply:
- 1.
for all .
- 2.
, and for all .
We say that A is an SBD matrix if it has a signed bidiagonal decomposition for some signature ε.
We will represent the bidiagonal decomposition of SBD matrices using the notation in (
7). We can define a sign diagonal matrix
associated to signature vector
such that
for all
and
for all
. Let us observe that there are only two possible sign matrices
K for any given
, defined by either
or
. Hence, we can univocally identify
with a sign matrix
K such that
. We can also characterize SBD matrices in terms of sign matrices
K.
Proposition 2 (Corollary 3.2 of [
16])
. Let A be an nonsingular matrix. Then, A has a signed bidiagonal decomposition if and only if there exists a diagonal matrix with for all such that is a TP matrix, where represents a matrix whose entries are the absolute values of the corresponding entries of A. This proposition implies that
-checkerboard matrices are SBD matrices for the signature vector associated to sign matrix
. Hence,
-checkerboard matrices can be represented in terms of a bidiagonal decomposition according to Definition 4. For these matrices, the associated signature vector is
, where
For a general
-checkerboard matrix, the signature vector of its inverse is given by
(see Theorem 3.1 of [
16]). Hence, the sign structure of their inverses is related to the sign blocks appearing in the
-block checkerboard matrices, and the following apply:
If we look at the blocks appearing in the principal diagonal of the matrix, the interior of the blocks of positive entries breaks into positive blocks when we compute the inverse.
The diagonal blocks that have positive diagonal entries and negative off-diagonal entries (corresponding to the end of a positive diagonal block and the start of the next one) turn into blocks of positive entries when computing the inverse.
In order to check this behavior, we should look at the signature vector associated to diagonal matrix
. By Theorem 3.1 of [
16], a matrix is SBD with signature
if and only if its inverse is SBD with signature
. For the case of
-checkerboard matrices, their inverses are SBD matrices with signature
. The negative entries in the signature vector imply that there is a change of sign in the associated sign matrix; hence, only
blocks of positive entries appear in the principal diagonal of the inverse matrix. The only positive entries of the signature vector appear for the indices
for
, which implies that the sign matrix has two entries with the same sign; therefore, at those positions, we find
blocks of positive entries.
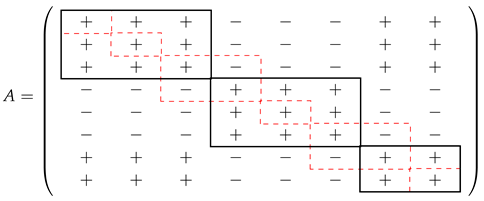
For example, for and , we have that the sign matrix of the inverse is . If we consider an r-checkerboard matrix A with the sign structure given by , we have that
where the black squares denote the diagonal blocks of positive entries. The dashed-line squares show how the interior of these blocks break into blocks and the blocks appearing when a positive block finishes and the next one starts. Hence, the sign structure of the inverse would be as follows:
For the particular case of 2-checkerboard matrices, we have that the two only possibilities for sign patterns are closely related. For a
-checkerboard matrix, the associated signature would be
. For a
-checkerboard matrix, its signature is
. Hence, we have that
, and we can obtain the following result by Theorem 3.1 of [
16].
Corollary 2. The inverse of a -checkerboard matrix is a -checkerboard matrix.
Proof. If
A is a
-checkerboard matrix, then by Proposition 3.4,
A is SBD with signature
. By Theorem 3.1 of [
16], a matrix is SBD with signature
if and only if its inverse is SBD with signature
. Therefore,
is SBD with signature
, which implies, by Proposition 3.4, that
is nonsingular TP; so,
is a
-checkerboard matrix. □
5. Intervals of Checkerboard Matrices
This section will present a result on intervals of checkerboard matrices. Given diagonal matrix
J and two
matrices
B and
C, we can define the checkerboard ordering associated to
J,
. We say that
if
, where ≤ is the usual entry-wise inequality between two matrices. This ordering has proven to be quite useful in characterizing intervals of TP matrices. In [
18], the following theorem, which identifies intervals of nonsingular TP matrices, was proven.
Theorem 3. Let B and C be nonsingular TP matrices satisfying , i.e., . If A is an matrix such that , then A is nonsingular TP.
This idea has been extended to find orderings associated to SBD matrices in [
19], and here, we analyze orderings for the case of checkerboard matrices. If a given
matrix
A is a
-checkerboard matrix, we know that
is nonsingular TP. Hence, we define the following ordering for
-checkerboard matrices.
Definition 5. Given two matrices, A and B, we define the ordering as if .
Now, we present a result on intervals of -checkerboard matrices based on the ordering .
Proposition 3. Let B and C be -checkerboard matrices satisfying , i.e., . If A is an matrix such that , then A is a -checkerboard matrix.
Proof. Since B and C are -checkerboard matrices, we have that and are nonsingular TP matrices that satisfy for an matrix A. Hence, by Theorem 3, is a nonsingular TP matrix, or equivalently, A is a -checkerboard matrix. □
7. Numerical Experiments
In [
13], Koev introduced methods to calculate the eigenvalues and the singular values of
A and the solution of linear systems of equations
, where
b has a pattern of alternating signs from the parameterization
for the case where
A is a TP matrix. These algorithms provide approximations to the solutions of these algebraic problems with HRA if
is obtained with HRA. In addition, in [
6], Marco and Martínez developed an algorithm to calculate, with HRA, the inverse
under the same previous hypotheses. In the software library
TNTool, available in [
17], these four algorithms are implemented with Matlab. The names of the corresponding functions are
TNEigenvalues,
TNSingularValues,
TNInverseExpand, and
TNSolve. They require, as input argument, bidiagonal decomposition
of
A, given by (
7), with HRA. In addition,
TNSolve needs vector
b of the system of linear equations
as a second argument. Regarding computational cost, the algorithms are at least as fast as the usual algorithms for solving these algebraic problems, as shown in the following:
In order to illustrate the theoretical results, we considered the square matrices
of order
defined by (
10), i.e.,
Table 1 shows the condition numbers
of these matrices. It can be observed that these matrices are very ill conditioned. So, accurate results cannot be expected when using the usual algorithms for solving algebraic problems with them.
It can be observed that
is a
-checkerboard matrix. In particular, it can be seen that
, where
is the symmetric generalized Pascal matrix defined by the absolute value of (
10) for
and
is the order
n matrix given by (
4). Since
is a TP matrix, taking into account the discussion in
Section 4, the singular values and the inverse of
, as well as the solution of systems
, whenever
has an alternating pattern of signs, can be computed with HRA. Observe that since
is a symmetric matrix, the eigenvalues and the singular values of
coincide. Since
, the same applies to matrices
.
The bidiagonal decomposition (
) of a generalized symmetric Pascal matrix
can be computed with HRA for all
by (
11) (taking the case where
for
). We implemented the algorithm for the computation of this bidiagonal decomposition in the Matlab function
TNBDGPascalSym.
First, by using
TNBDGPascalSym in Matlab, we calculated the bidiagonal decomposition (
) with high relative accuracy. Then, we computed approximations to the singular values of
by using
TNSingularValues with
as input argument. Approximations to these singular values were also obtained with the Matlab function
svd. In order to illustrate the accuracy of the approximations to the singular values computed by the two methods, the singular values of
were also calculated with Mathematica using a precision of one hundred digits. Then, the relative errors for the approximations to the singular values obtained by both methods were computed, taking the singular values obtained with Mathematica as the exact singular values. These relative errors showed that the approximations of all the singular values calculated by using
TNBDGPascalSym are highly accurate and that the approximations of the lower singular values computed by using the Matlab function
svd are not very accurate. It was also observed that the lower the singular value is, the less accurate the approximation provided by
svd is. To demonstrate this fact, the relative errors of the approximations to the smallest singular value of the considered examples (
,
), obtained by both
svd and
TNSingularValues, are shown in
Figure 1. From the results in that figure, it can be concluded that our method produces very accurate results, as opposed to the inaccurate results obtained with
svd.
Approximations to
,
, were also obtained by using Matlab with
inv and by using
TNInverseExpand together with
TNBDGPascalSym. The exact inverses,
, were obtained with Mathematica using exact arithmetic. Then, the corresponding component-wise relative errors were computed. The mean relative errors are shown in
Figure 2a, and the maximum relative errors are shown in (b). In this case, it is also clear that the accuracy of the results provided by
TNInverseExpand is significantly better than that of the results provided by
inv.
Finally, we considered the systems of linear equations
,
such that
has an alternating pattern of signs and with entries whose absolute value is an integer randomly chosen in the interval
. Then, approximations to the solution of these linear systems were computed in two ways: the first one, by using the Matlab command
A\b, and the second one, by solving the system
with
TNSolve and then computing the solution of the original system as
. The exact solutions of these systems were computed with Mathematica; then, the component-wise relative errors for both approximations were calculated. The mean relative errors are shown in
Figure 3a, and the maximum relative errors are shown in (b). The results obtained with the HRA algorithms are much better from the point of view of accuracy than the results obtained with the usual Matlab method.
In order to compare the computation time of the HRA methods with that of the usual methods, we solved the three algebraic problems considered in this section for
one hundred times.
Table 2 shows the average computation time for each one of the algebraic problems.










{kind=link}
{kind=link}
{kind=link}