
Preview-Based Optimal Control for Trajectory Tracking of Fully-Actuated Marine Vessels

Abstract
1. Introduction
- (i)
- This paper introduces a novel parametric design method that eliminates the nonlinear terms in a fully actuated second-order nonlinear marine vessel dynamic model, transforming it into a linear steady-state form. Compared to existing control methods [24,25,26], our approach retains the original nonlinear system’s dynamic characteristics while significantly simplifying the control design, enabling more precise control in variable dynamic models.
- (ii)
- An internal model is employed to construct a new augmented error system. We uniquely combine an internal model compensator with the error system approach to track reference signals with known structures. Unlike traditional optimal control methods that often fail to handle dynamic and variable reference trajectories efficiently [27], our compensator design enables robust tracking under complex dynamic environments. Furthermore, we rigorously derive stabilization and observability conditions to ensure system stability and control feasibility, setting this study apart from methods lacking theoretical guarantees.
- (iii)
- The paper presents a first application of optimization-based preview control, applied for fully actuated marine vessels. This approach focuses on state design, demonstrating its effectiveness through numerical simulations that validate the controller’s precision in trajectory tracking.
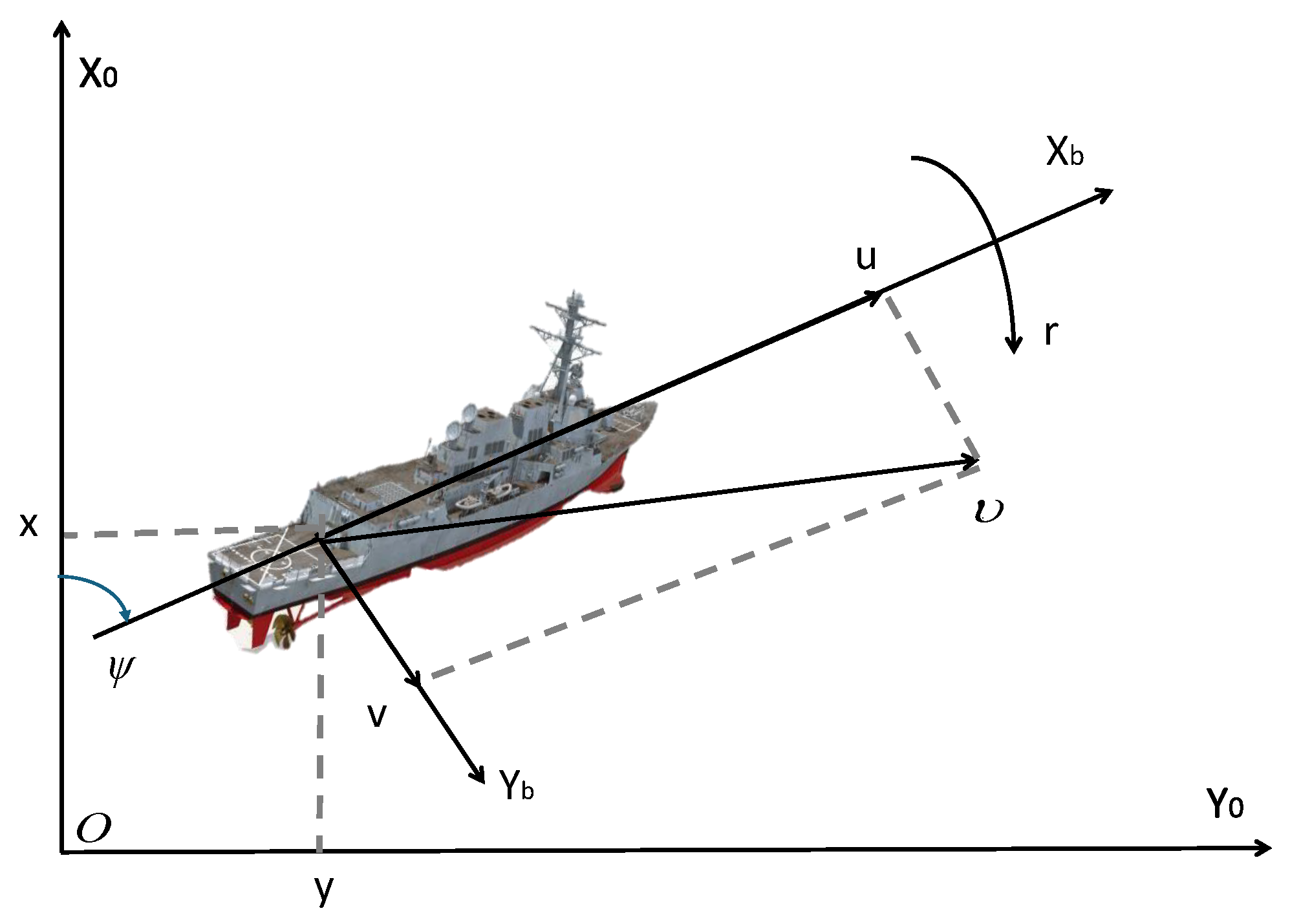
2. Problem Statement
3. Designing the Preview Tracking Control
- 1.
- is controllable;
- 2.
- the characteristic polynomial of , the minimal polynomial of and the minimal polynomial of are all the same.
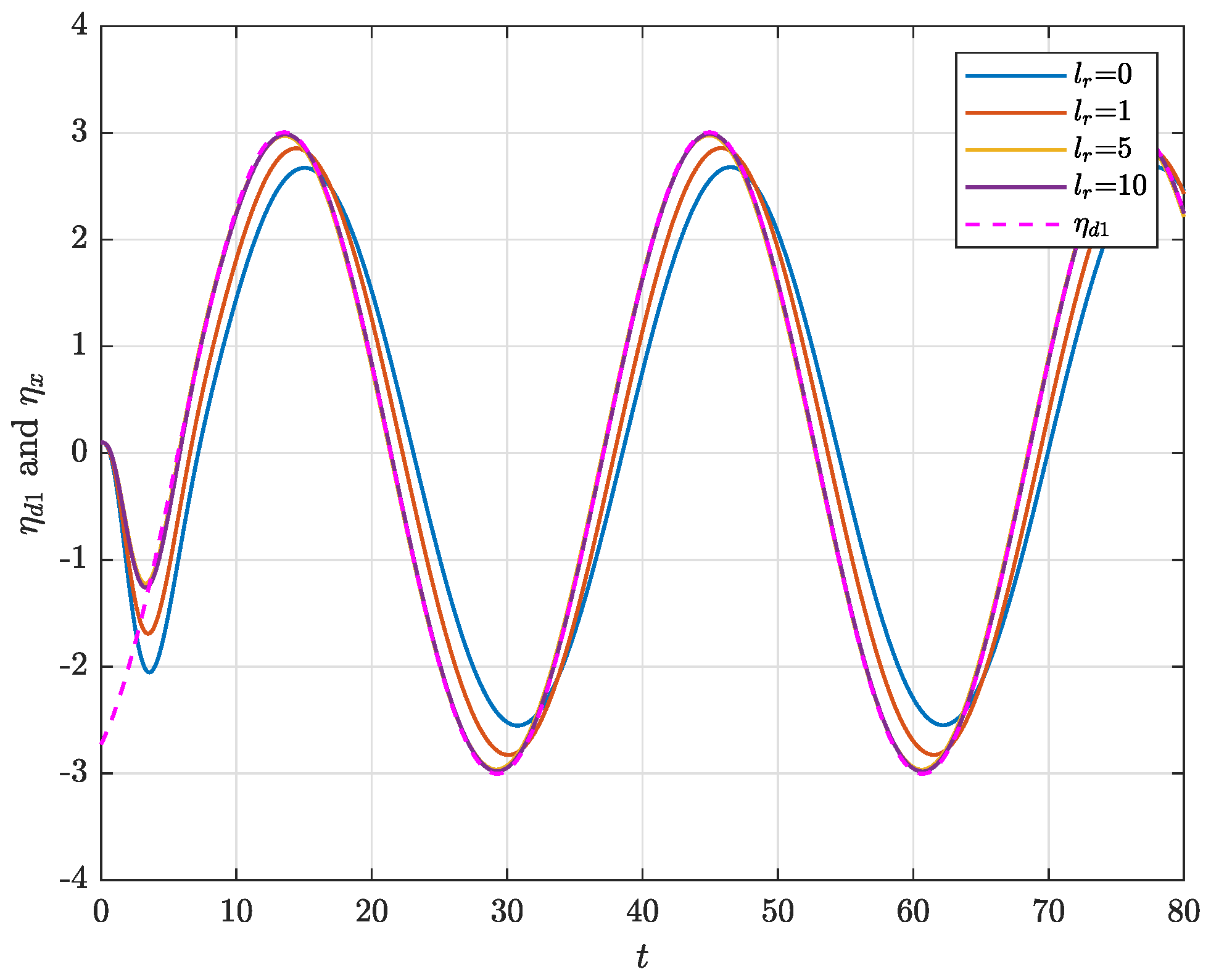
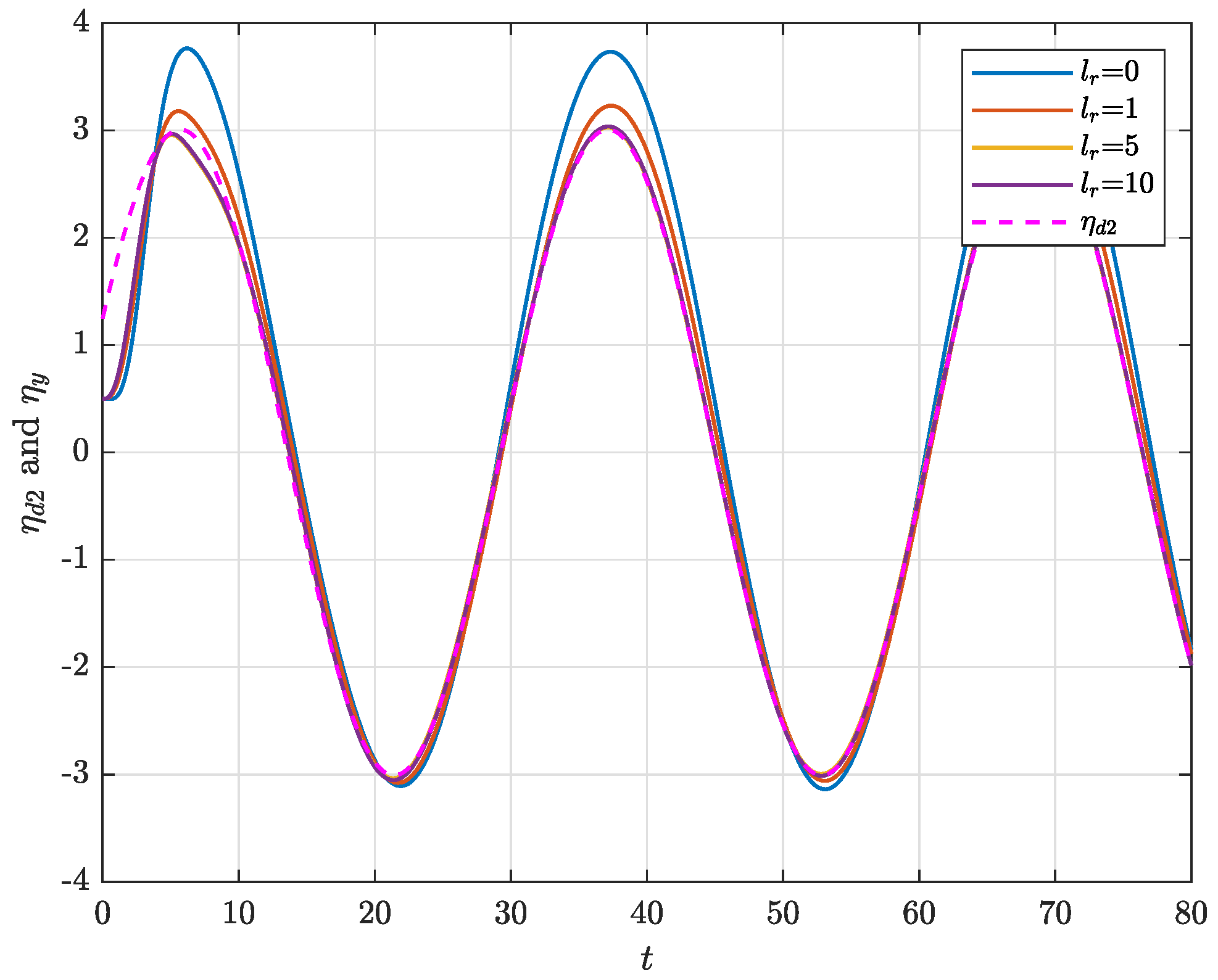
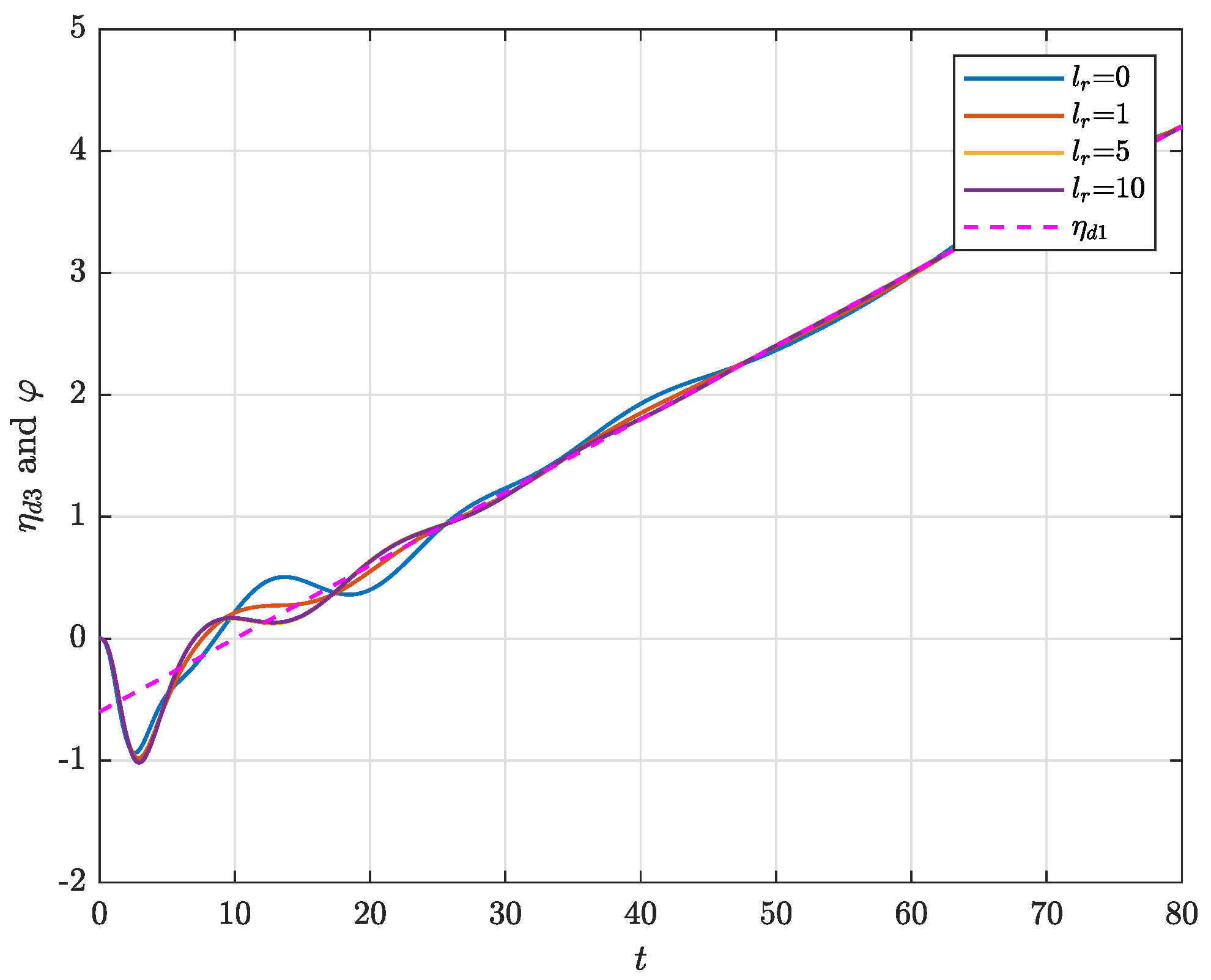
4. Illustrative Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bai, X.; Li, B.; Xu, X.; Xiao, Y. A review of current research and advances in unmanned surface vehicles. J. Mar. Sci. Appl. 2022, 21, 47–58. [Google Scholar] [CrossRef]
- Li, J.; Zhang, G.; Jiang, C.; Zhang, W. A survey of maritime unmanned search system: Theory, applications and future directions. Ocean. Eng. 2023, 285, 115359. [Google Scholar] [CrossRef]
- Karimi, H.R.; Lu, Y. Guidance and control methodologies for marine vehicles: A survey. Control Eng. Pract. 2021, 111, 104785. [Google Scholar] [CrossRef]
- Liang, X.; Ge, S.S.; Li, D. Coordinated tracking control of multi agent systems with full-state constraints. J. Frankl. Inst. 2023, 360, 12030–12054. [Google Scholar] [CrossRef]
- Liang, X.; Wang, D.; Ge, S.S. Continuous preview control based on dynamic surface design with application to trajectory tracking. Appl. Ocean. Res. 2021, 111, 102615. [Google Scholar] [CrossRef]
- Theunissen, J.; Tota, A.; Gruber, P.; Dhaens, M.; Sorniotti, A. Preview-based techniques for vehicle suspension control: A state-of-the-art review. Annu. Rev. Control 2021, 51, 206–235. [Google Scholar] [CrossRef]
- Sheridan, T.B. Three models of preview control. IEEE Trans. Hum. Factors Electron. 1966, HFE-7, 91–102. [Google Scholar] [CrossRef]
- Tomizuka, M.; Rosenthal, D.E. On the optimal digital state vector feedback controller with integral and preview actions. J. Dyn. Syst. Meas. Control 1979, 101, 172–178. [Google Scholar] [CrossRef]
- Katayama, T.; Ohki, T.; Inoue, T.; Kato, T. Design of an optimal controller for a discrete-time system subject to previewable demand. Int. J. Control 1985, 41, 677–699. [Google Scholar] [CrossRef]
- Katayama, T.; Hirono, T. Design of an optimal servomechanism with preview action and its dual problem. Int. J. Control 1987, 45, 407–420. [Google Scholar] [CrossRef]
- Liao, F.; Takaba, K.; Katayama, T.; Katsuura, J. Design of an optimal preview servomechanism for discrete-time systems in a multirate setting. Dyn. Contin. Discret. Impuls. Syst. Ser. B 2003, 10, 727–744. [Google Scholar]
- Shi, Q.; Liao, F. Design of an optimal preview controller for linear discrete-time multirate systems with state-delay. Chin. J. Eng. 2011, 33, 363–375. [Google Scholar]
- Cao, M.; Liao, F. Design of an optimal preview controller for linear discrete-time descriptor systems with state delay. Int. J. Syst. Sci. 2015, 46, 932–943. [Google Scholar] [CrossRef]
- Wu, J.; Liao, F.; Xu, Z. Preview control for a class of linear stochastic systems with multiplicative noise. Int. J. Syst. Sci. 2019, 50, 2592–2603. [Google Scholar] [CrossRef]
- Li, L.; Liao, F. Robust preview control for a class of uncertain discrete-time systems with time-varying delay. ISA Trans. 2018, 73, 11–21. [Google Scholar] [CrossRef] [PubMed]
- Cai, G.; Xu, L.; Liu, Y.; Feng, J.; Liang, J.; Lu, Y.; Yin, G. Robust preview path tracking control of autonomous vehicles under time-varying system delays and saturation. IEEE Trans. Veh. Technol. 2023, 72, 8486–8499. [Google Scholar] [CrossRef]
- Xiao, H.; Zhen, Z.; Xue, Y. Fault-tolerant attitude tracking control for carrier-based aircraft using RBFNN-based adaptive second-order sliding mode control. Aerosp. Sci. Technol. 2023, 139, 108408. [Google Scholar] [CrossRef]
- Ren, J.; Jiang, C. Robust sliding mode preview control for uncertain discrete-time systems with time-varying delay. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2022, 236, 772–782. [Google Scholar] [CrossRef]
- Lan, Y.H.; Zhao, J.Y.; She, J.H. Preview repetitive control with equivalent input disturbance for continuous-time linear systems. IET Control Theory Appl. 2022, 16, 125–138. [Google Scholar] [CrossRef]
- Ames, A.D.; Xu, X.; Grizzle, J.W.; Tabuada, P. Control barrier function based quadratic programs for safety critical systems. IEEE Trans. Autom. Control 2016, 62, 3861–3876. [Google Scholar] [CrossRef]
- Birla, N.; Swarup, A. Optimal preview control: A review. Optim. Control Appl. Methods 2015, 36, 241–268. [Google Scholar] [CrossRef]
- Zhao, L.; Bai, Y.; Paik, J.K. Optimal coverage path planning for USV-assisted coastal bathymetric survey: Models, solutions, and lake trials. Ocean. Eng. 2024, 296, 116921. [Google Scholar] [CrossRef]
- Duan, G.R. Fully Actuated System Approach for Control: An Overview. IEEE Trans. Cybern. 2024, 54, 7285–7306. [Google Scholar] [CrossRef] [PubMed]
- Yan, T.; Xu, Z.; Yang, S.X. Distributed robust learning-based backstepping control aided with neurodynamics for consensus formation tracking of underwater vessels. IEEE Trans. Cybern. 2024, 54, 2434–2445. [Google Scholar] [CrossRef]
- Cao, G.; Jia, Z.; Wu, D.; Li, Z.; Zhang, W. Trajectory tracking control for marine vessels with error constraints: A barrier function sliding mode approach. Ocean. Eng. 2024, 297, 116879. [Google Scholar] [CrossRef]
- Liu, L.; Li, Z.; Chen, Y.; Wang, R. Disturbance observer-based adaptive intelligent control of marine vessel with position and heading constraint condition related to desired output. IEEE Trans. Neural Netw. Learn. Syst. 2022, 35, 5870–5879. [Google Scholar] [CrossRef]
- Li, T.; Tong, S.; Xiao, Y.; Shan, Q. Broad learning system approximation-based adaptive optimal control for unknown discrete-time nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 5028–5038. [Google Scholar]
- Lu, Y.; Liao, F.; Deng, J.; Liu, H. Cooperative global optimal preview tracking control of linear multi-agent systems: An internal model approach. Int. J. Syst. Sci. 2017, 48, 2451–2462. [Google Scholar] [CrossRef]
- Huang, J. Nonlinear output regulation: Theory and applications. Soc. Ind. Appl. Math. 2004. [Google Scholar]
- Fiskin, R.; Atik, O.; Kisi, H.; Nasibov, E.; Johansen, T.A. Fuzzy domain and meta-heuristic algorithm-based collision avoidance control for ships: Experimental validation in virtual and real environment. Ocean. Eng. 2021, 220, 108502. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control Systems–Guidance, Navigation, and Control of Ships, Rigs and Underwater Vehicles; Marine Cybernetics: Trondheim, Norway, 2002. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Mass of the ship | m | kg |
| Added mass in surge | kg | |
| Added mass in sway | kg | |
| Added mass in yaw | kg·m2 | |
| Hydrodynamic damping in surge | kg | |
| Hydrodynamic damping in sway | kg | |
| Hydrodynamic damping in yaw | kg·m2 | |
| Length of the ship | L | m |
| Beam of the ship | B | m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, X.; Wu, J.; Xie, H.; Lu, Y. Preview-Based Optimal Control for Trajectory Tracking of Fully-Actuated Marine Vessels. Mathematics 2024, 12, 3942. https://doi.org/10.3390/math12243942
Liang X, Wu J, Xie H, Lu Y. Preview-Based Optimal Control for Trajectory Tracking of Fully-Actuated Marine Vessels. Mathematics. 2024; 12(24):3942. https://doi.org/10.3390/math12243942
Chicago/Turabian StyleLiang, Xiaoling, Jiang Wu, Hao Xie, and Yanrong Lu. 2024. "Preview-Based Optimal Control for Trajectory Tracking of Fully-Actuated Marine Vessels" Mathematics 12, no. 24: 3942. https://doi.org/10.3390/math12243942
APA StyleLiang, X., Wu, J., Xie, H., & Lu, Y. (2024). Preview-Based Optimal Control for Trajectory Tracking of Fully-Actuated Marine Vessels. Mathematics, 12(24), 3942. https://doi.org/10.3390/math12243942