
New Abundant Analytical Solitons to the Fractional Mathematical Physics Model via Three Distinct Schemes



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Concerning Equation and Its Mathematical Treatment
3. Modified Simplest Equation Technique
- Step 1: Suppose a nonlinear partial differential equation:where denotes a real wave-profile. Suppose the given relation:
- Step 2: Consider Equation (9) has solution given as:where represent the undetermined. A novel profile satisfies the ODE:where ℧ indicates a constant. Notice that Equation (11) has the distinct results based on ℧:If , then:If :If ,
Application of MSE Scheme
4. Explanation of Sardar Subequation Technique
- Case 1: when is positive and is zero, then:where ,
- Case 2: when is negative and is zero, we havewhere ,
- Case 3: when is negative and , then:where ,
- Case 4: when is positive and , we havewhere ,
New Wave Solitons via the Sardar Subequation Method
- Case 1: when is positive and is zero, then:
- Case 2: when is negative and is zero, we have:
- Case 3: when is negative and , then:
- Case 4: when is positive and , we have:
5. Generalized Kudryashov Technique
- Step 1: Assume a nonlinear PDE:where q is a wave-profile. Substituting the given relation:into Equation (83) yields the NLODE:
- Step 2: Considering roots of Equation (85) are:where , are unknowns and is also a wave profile of , which is a root of the general Riccati equation defined by:The coefficients and c are the parameters. Determining the roots for Equation (87) is discussed through the given cases [39]:Case 1: when all and c are all nonzero, we have shown asCase 2: when , and , we have:Case 3: when b is zero and c is nonzero, we have:Case 4: when c is zero and b is nonzero, we have:
Novel Wave Solitons via the Generalized Kudryashov Method
- Case 1: when all and c are all nonzero, we have shown as.
- Case 2: when , and , we have:
- Case 3: when b is zero and c is nonzero, we have:
- Case 4: when c is zero and b is nonzero, we have:
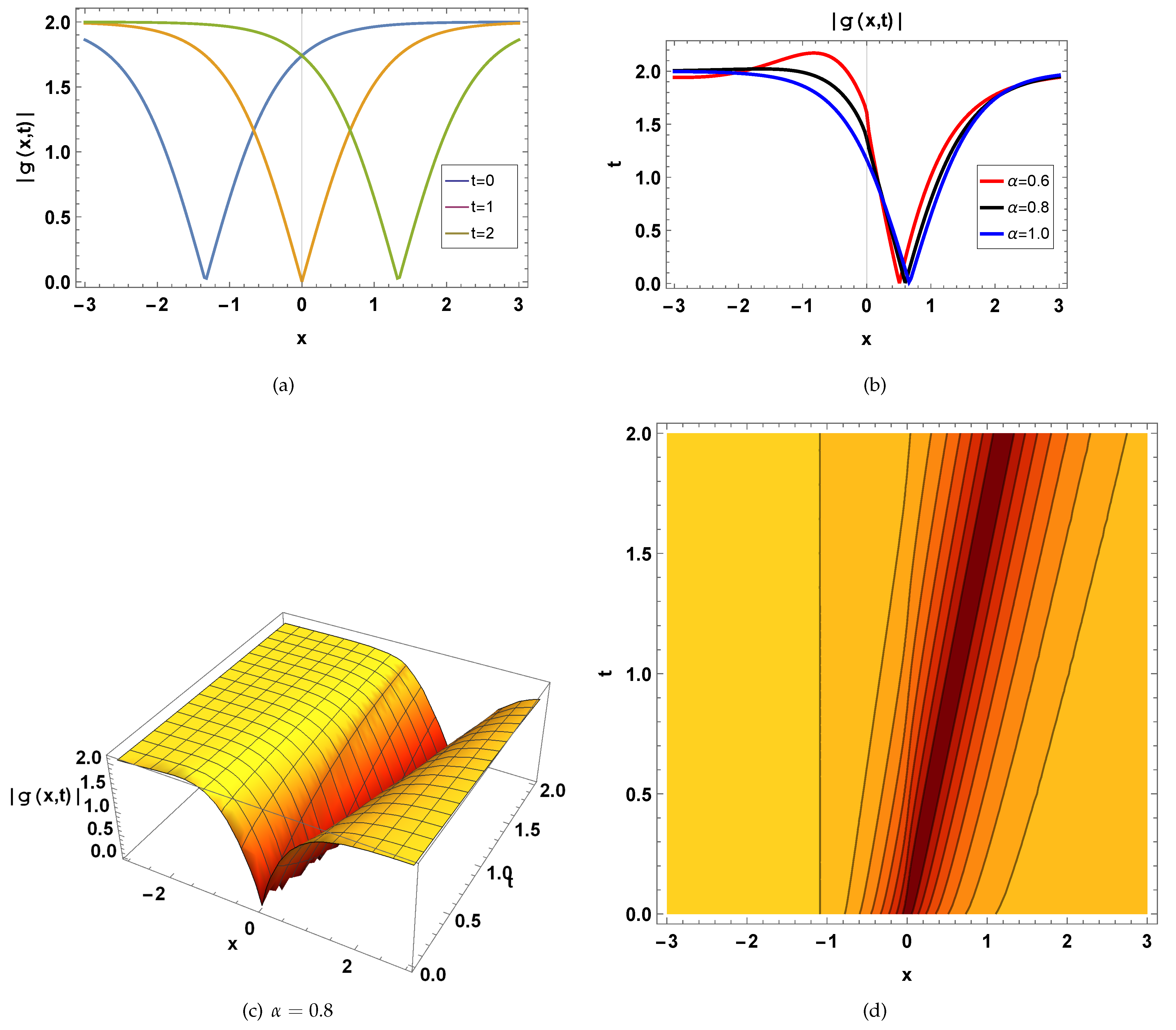
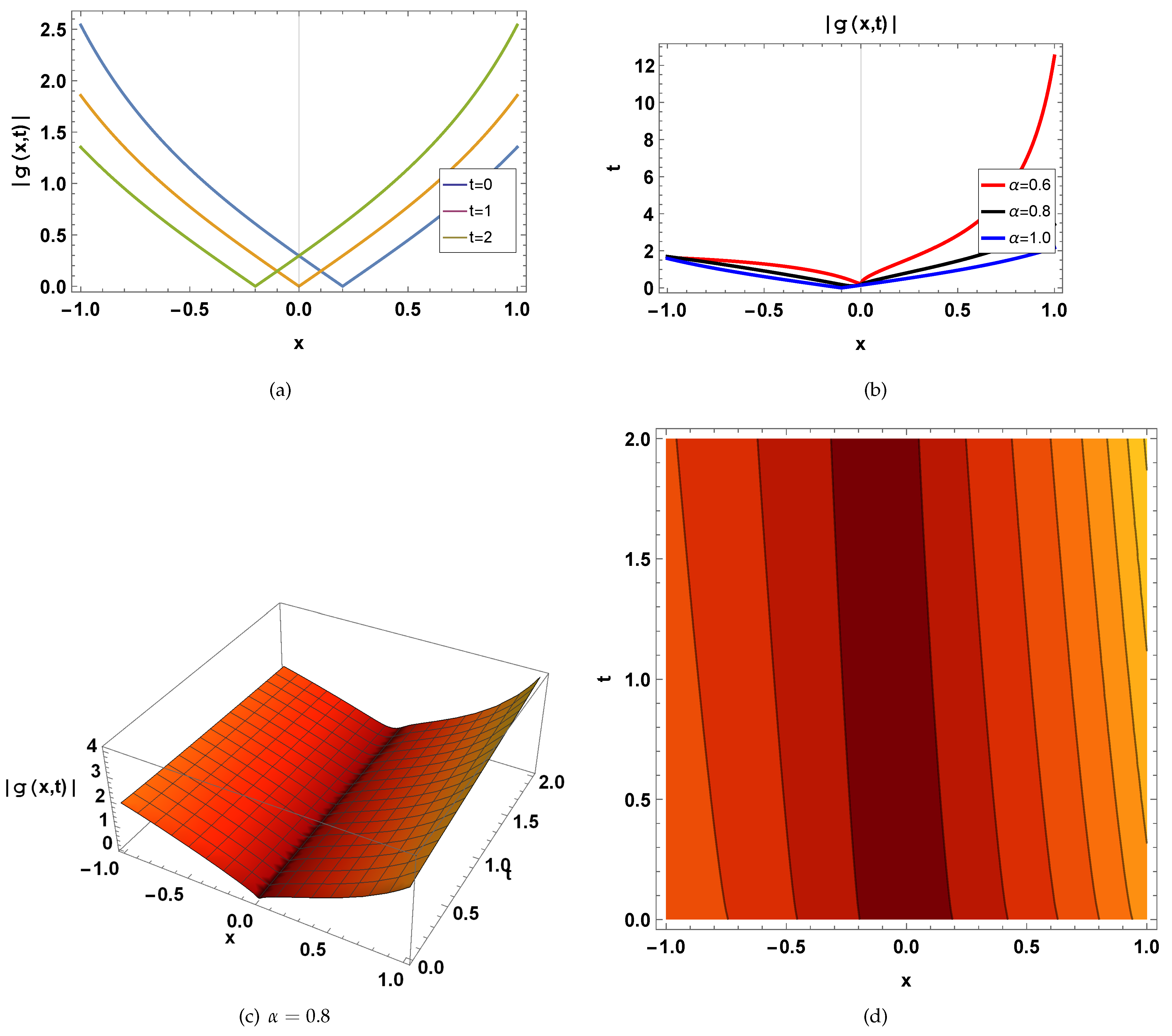
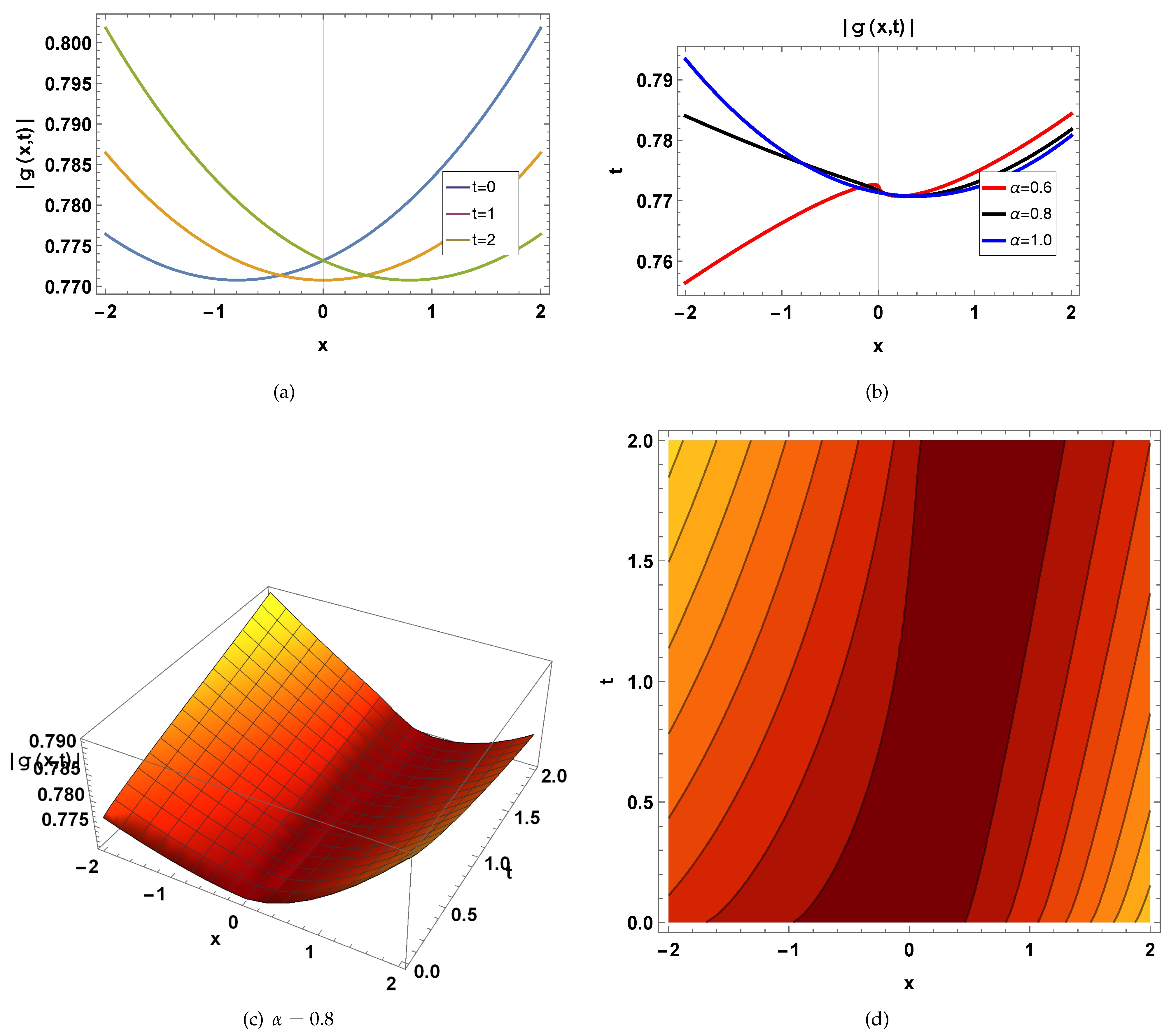
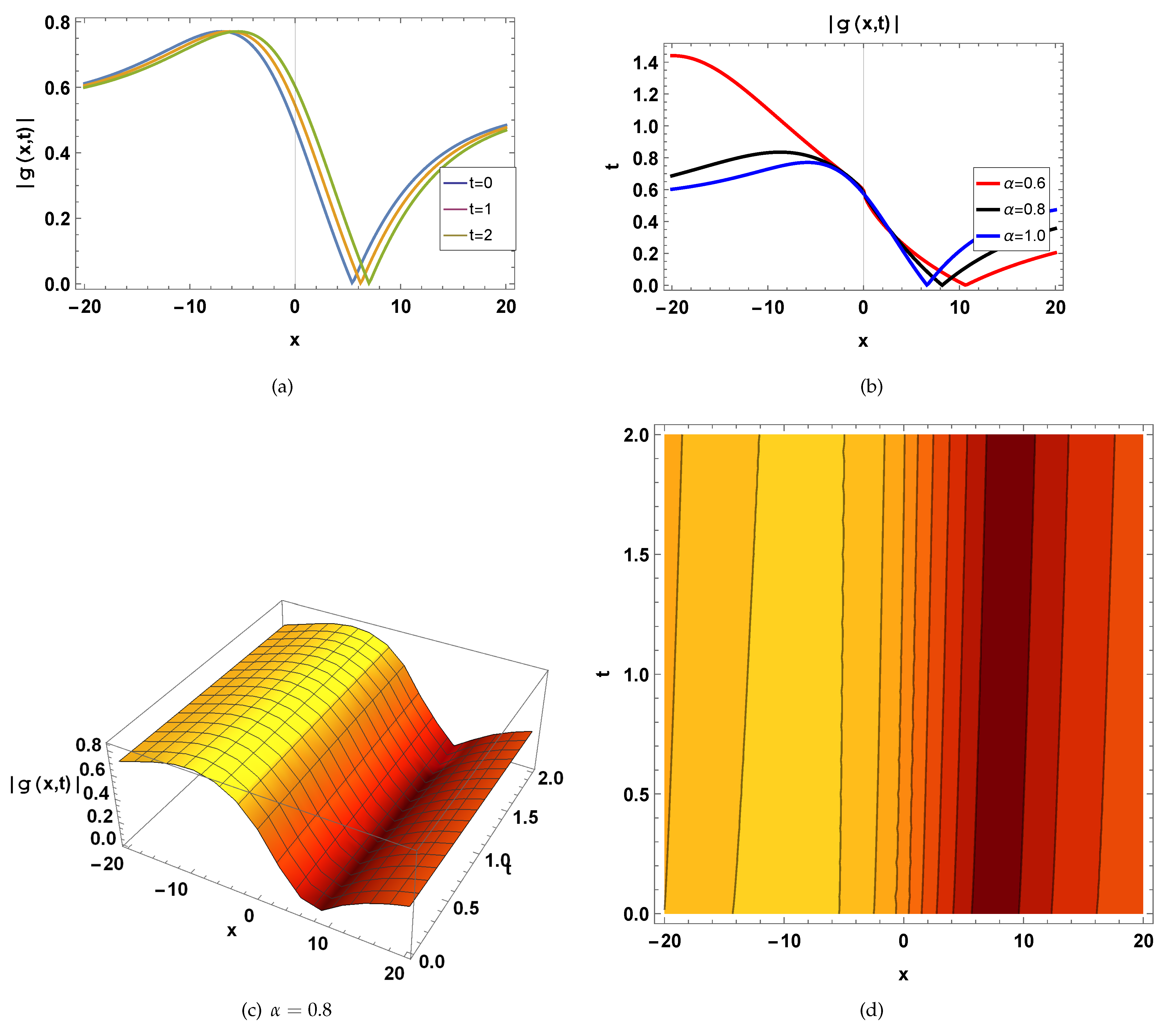
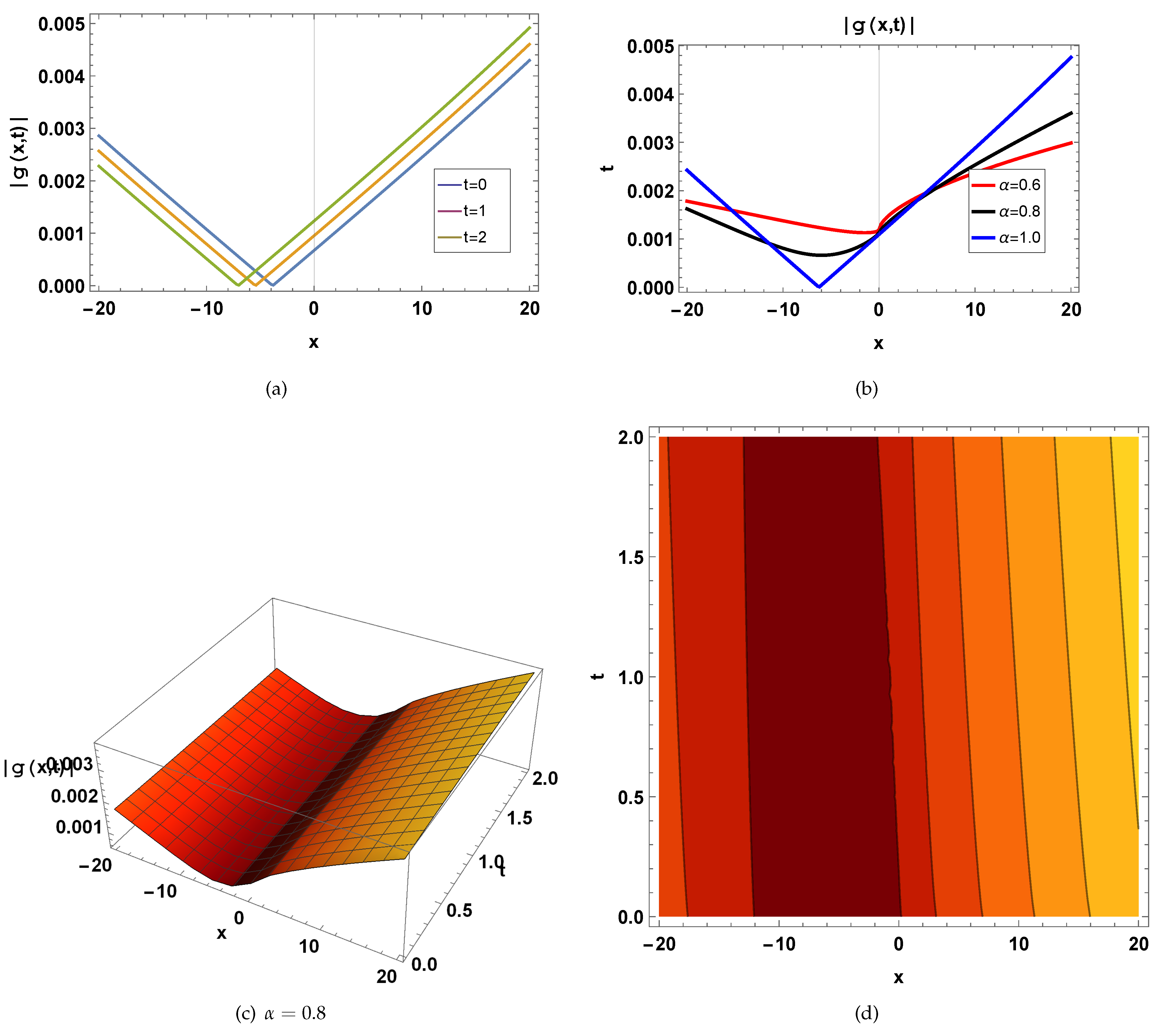
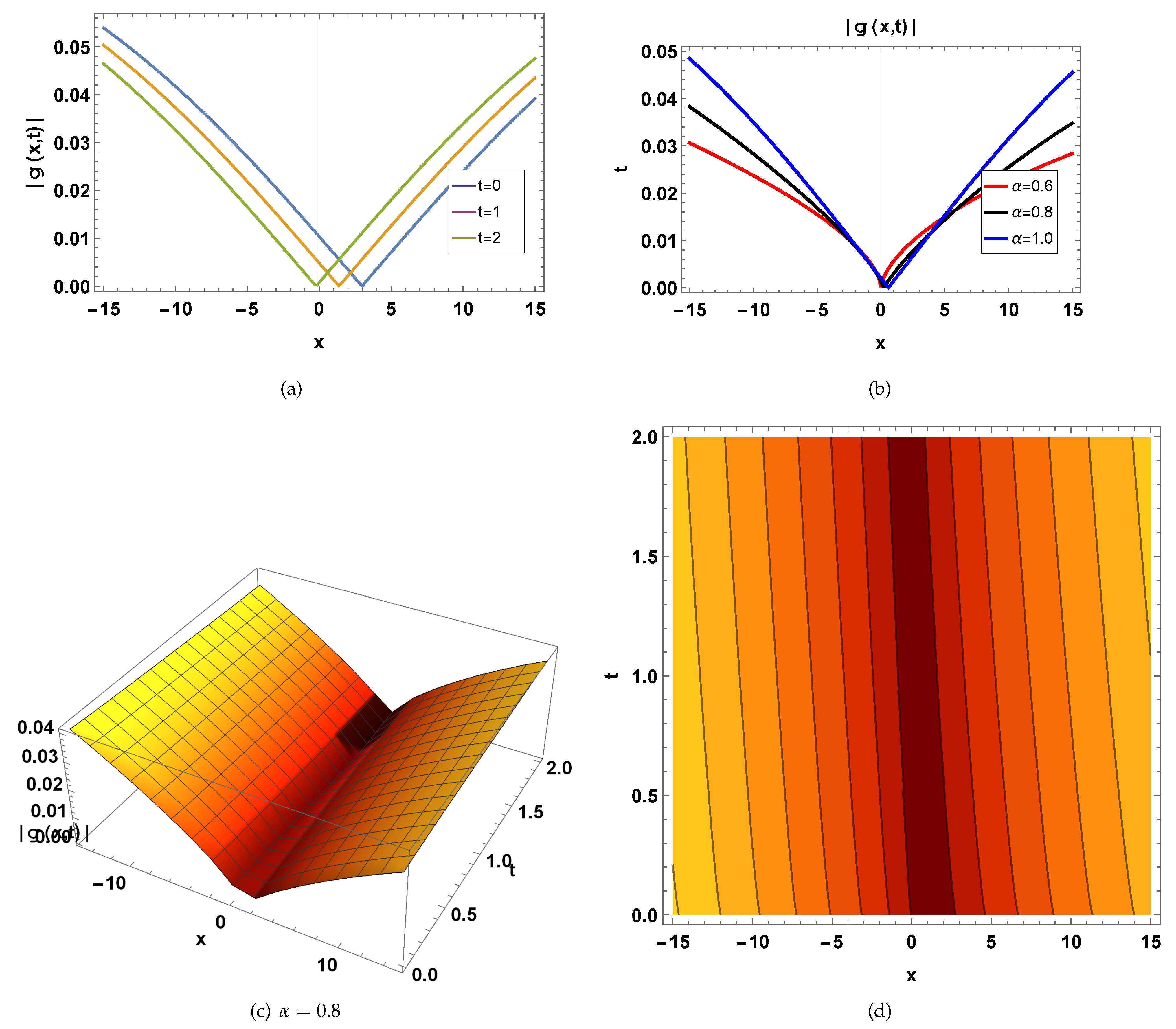
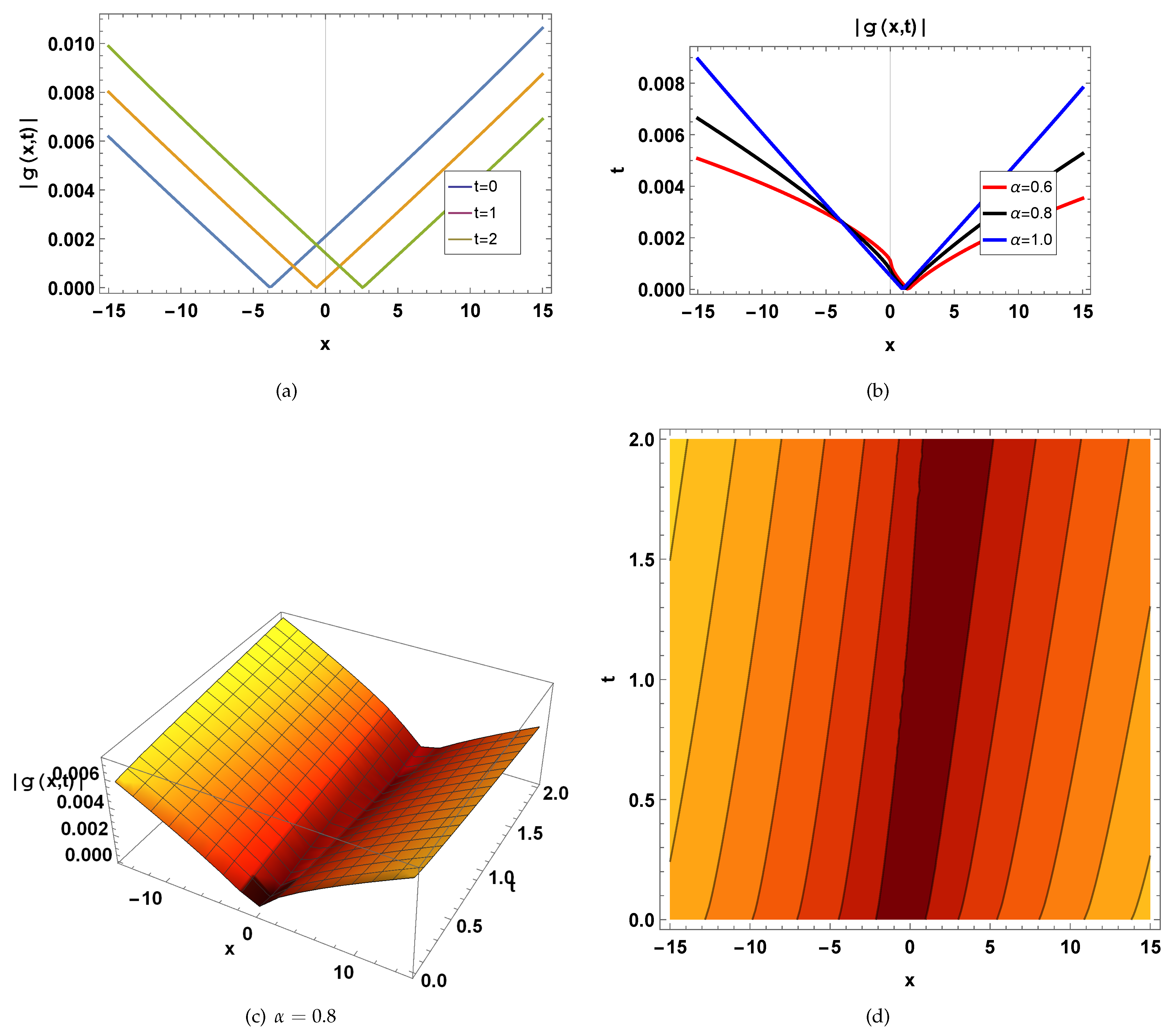
6. Physical Explanation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kuwayama, H.; Ishida, S. Biological soliton in multicellular movement. Sci. Rep. 2013, 3, 2272. [Google Scholar] [CrossRef] [PubMed]
- Cheng, C.D.; Tian, B.; Shen, Y.; Zhou, T. Bilinear form and Pfaffian solutions for a (2+ 1)-dimensional generalized Konopelchenko–Dubrovsky–Kaup–Kupershmidt system in fluid mechanics and plasma physics. Nonlinear Dyn. 2023, 111, 6659–6675. [Google Scholar] [CrossRef]
- Bilal, M.; Ahmad, J. New exact solitary wave solutions for the 3D-FWBBM model in arising shallow water waves by two analytical methods. Results Phys. 2021, 25, 104230. [Google Scholar]
- Alshahrani, B.; Yakout, H.A.; Khater, M.M.A.; Abdel-Aty, A.-H.; Mahmoud, E.E.; Baleanu, D.; Eleuch, H. Accurate novel explicit complex wave solutions of the (2+ 1)-dimensional Chiral nonlinear Schrödinger equation. Results Phys. 2021, 23, 104019. [Google Scholar] [CrossRef]
- Kudryashov, N.A. Method for finding highly dispersive optical solitons of nonlinear differential equations. Optik 2020, 206, 163550. [Google Scholar] [CrossRef]
- Hafez, M.G.; Alam, M.N.; Akbar, M.A. Exact traveling wave solutions to the Klein–Gordon equation using the novel (G′/G)-expansion method. Results Phys. 2014, 4, 177–184. [Google Scholar] [CrossRef]
- Tariq, K.U.; Ahmed, A.; Ma, W.-X. On some soliton structures to the Schamel–Korteweg-de Vries model via two analytical approaches. Mod. Phys. Lett. B 2022, 36, 2250137. [Google Scholar] [CrossRef]
- Tariq, K.U.; Zabihi, A.; Rezazadeh, H.; Younis, M.; Rizvi, S.T.R.; Ansari, R. On new closed form solutions: The (2+ 1)-dimensional Bogoyavlenskii system. Mod. Phys. Lett. B 2021, 35, 2150150. [Google Scholar] [CrossRef]
- Seadawy, A.R.; Alamri, S.Z. Mathematical methods via the nonlinear two-dimensional water waves of Olver dynamical equation and its exact solitary wave solutions. Results Phys. 2018, 8, 286–291. [Google Scholar] [CrossRef]
- Wang, Z.-Y.; Tian, S.-F.; Cheng, J. The ∂−-Dressing method and soliton solutions for the three-component coupled Hirota equations. J. Math. Phys. 2021, 62, 9. [Google Scholar] [CrossRef]
- Li, Y.; Tian, S.-F.; Yang, J.-J. Riemann–Hilbert problem and interactions of solitons in the-component nonlinear Schrödinger equations. Stud. Appl. Math. 2022, 148, 577–605. [Google Scholar] [CrossRef]
- Li, Z.-Q.; Tian, S.-F.; Yang, J.-J. On the soliton resolution and the asymptotic stability of N-soliton solution for the Wadati-Konno-Ichikawa equation with finite density initial data in space-time solitonic regions. Adv. Math. 2022, 409, 108639. [Google Scholar] [CrossRef]
- Razzaq, W.; Zafar, A.; Raheel, M. Searching the new exact wave solutions to the beta-fractional Paraxial nonlinear Schrödinger model via three different approaches. Int. J. Mod. Phys. B 2024, 38, 2450132. [Google Scholar] [CrossRef]
- Batool, F.; Rezazadeh, H.; Ali, Z.; Demirbilek, U. Exploring soliton solutions of stochastic Phi-4 equation through extended Sinh-Gordon expansion method. Opt. Quantum Electron. 2024, 56, 785. [Google Scholar] [CrossRef]
- Qawaqneh, H.; Manafian, J.; Alharthi, M.; Alrashedi, Y. Stability Analysis, Modulation Instability, and Beta-Time Fractional Exact Soliton Solutions to the Van der Waals Equation. Mathematics 2024, 12, 2257. [Google Scholar] [CrossRef]
- Gao, X.-T.; Tian, B.; Zhou, T.-Y.; Shen, Y.; Feng, C.-H. For the Shallow Water Waves: Bilinear-Form and Similarity-Reduction Studies on a Boussinesq-Burgers System. Int. J. Theor. Phys. 2024, 63, 1–10. [Google Scholar] [CrossRef]
- Dassios, G.; Vafeas, P. On the spheroidal semiseparation for stokes flow. Phys. Res. Int. 2008, 1, 135289. [Google Scholar] [CrossRef]
- Akbari, M. Exact solutions of the coupled Higgs equation and the Maccari system using the modified simplest equation method. Inf. Sci. Lett. 2013, 2, 155–158. [Google Scholar] [CrossRef]
- Kuo, C.-K. New solitary solutions of the Gardner equation and Whitham–Broer–Kaup equations by the modified simplest equation method. Optik 2017, 147, 128–135. [Google Scholar] [CrossRef]
- Murad, M.A.S.; Iqbal, M.; Arnous, A.H.; Yildirim, Y.; Jawad, A.J.A.M.; Hussein, L.; Biswas, A. Optical dromions for Radha–Lakshmanan model with fractional temporal evolution by modified simplest equation. J. Opt. 2024, 1–10. [Google Scholar] [CrossRef]
- Debin, K.; Rezazadeh, H.; Ullah, N.; Vahidi, J.; Tariq, K.U.; Akinyemi, L. New soliton wave solutions of a (2+ 1)-dimensional Sawada-Kotera equation. J. Ocean. Eng. Sci. 2022, 8, 527–532. [Google Scholar] [CrossRef]
- Cinar, M.; Secer, A.; Ozisik, M.; Bayram, M. Derivation of optical solitons of dimensionless Fokas-Lenells equation with perturbation term using Sardar sub-equation method. Opt. Quantum Electron. 2022, 54, 402. [Google Scholar] [CrossRef]
- Tariq, M.M.; Riaz, M.B.; Aziz-ur-Rehman, M. Investigation of space-time dynamics of Akbota equation using Sardar sub-equation and Khater methods: Unveiling bifurcation and chaotic structure. Int. J. Theor. Phys. 2024, 63, 210. [Google Scholar] [CrossRef]
- Barman, H.K.; Roy, R.; Mahmud, F.; Akbar, M.A.; Osman, M.S. Harmonizing wave solutions to the Fokas-Lenells model through the generalized Kudryashov method. Optik 2021, 229, 166294. [Google Scholar] [CrossRef]
- Pandir, Y.; Sahragül, E. Exact solutions of the two dimensional KdV-Burger equation by generalized Kudryashov method. J. Inst. Sci. Technol. 2021, 11, 617–624. [Google Scholar] [CrossRef]
- Aydın, Z.; Taşcan, F. Application of the generalized Kudryashov method to the Kolmogorov-Petrovskii-Piskunov equation. Eskişehir Tech. Univ. J. Sci. Technol. A Appl. Sci. Eng. 2024, 25, 320–330. [Google Scholar] [CrossRef]
- Alam, M.N.; Akbar, M.A. Some new exact travelling wave solutions to the simplified MCH equation and the (1+1)-dimensional combined KdV-mKdV equations. J Assoc. Arab. Univ. Basic Appl. Sci. 2015, 17, 6–13. [Google Scholar]
- Zulfiqar, A.; Ahmad, J. Exact solitary wave solutions of fractional modified Camassa–Holm equation using an efficient method. Alexandra Eng. J. 2020, 59, 3565–3574. [Google Scholar] [CrossRef]
- Hassan, S.Z.; Abdelrahman, M.A. Solitary wave solutions for some nonlinear time-fractional partial differential equations. Pramana 2018, 91, 67. [Google Scholar] [CrossRef]
- Devnath, S.; Khan, S.; Akbar, M.A. Exploring solitary wave solutions to the simplified modified camassa-holm equation through a couple sophisticated analytical approaches. Results Phys. 2024, 59, 107580. [Google Scholar] [CrossRef]
- Khatun, M.M.; Akbar, M.A. Analytical soliton solutions of the beta time-fractional simplified modified Camassa-Holm equation in shallow water wave propagation. J. Umm -Qura Univ. Appl. Sci. 2024, 10, 120–128. [Google Scholar] [CrossRef]
- Wazwaz, A.M. Solitary wave solutions for modified forms of Degasperis–Procesi and Camassa–Holm equations. Phys. Lett. A 2006, 352, 500–504. [Google Scholar] [CrossRef]
- Zafar, A.; Raheel, M.; Hosseini, K.; Mirzazadeh, M.; Salahshour, S.; Park, C.; Shin, D.Y. Diverse approaches to search for solitary wave solutions of the fractional modified Camassa–Holm equation. Results Phys. 2021, 31, 104882. [Google Scholar] [CrossRef]
- Sulaiman, T.A.; Yel, G.; Bulut, H. M-fractional solitons and periodic wave solutions to the Hirota- Maccari system. Mod. Phys. Lett. B 2019, 33, 1950052. [Google Scholar] [CrossRef]
- Sousa, J.V.D.C.; de Oliveira, E.C. A new truncated M-fractional derivative type unifying some fractional derivative types with classical properties. Int. J. Anal. Appl. 2018, 16, 83–96. [Google Scholar]
- Ullah, N.; Asjad, M.I.; Awrejcewicz, J.; Muhammad, T.; Baleanu, D. On soliton solutions of fractional-order nonlinear model appears in physical sciences. AIMS Math. 2022, 7, 7421–7440. [Google Scholar] [CrossRef]
- Kudryashov, N.A. One method for finding exact solutions of nonlinear differential equations. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 2248–2253. [Google Scholar] [CrossRef]
- Gaber, A.A.; Aljohani, A.F.; Ebaid, A.; Machado, J.T. The generalized Kudryashov method for nonlinear space-time fractional partial differential equations of burgers type. Nonlinear Dyn. 2019, 95, 361–368. [Google Scholar] [CrossRef]
- Gómez, C.A.; Salas, A.H. Special symmetries to standard Riccati equations and applications. Appl. Math. Comput. 2010, 216, 3089–3096. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alomair, A.; Al Naim, A.S.; Bekir, A. New Abundant Analytical Solitons to the Fractional Mathematical Physics Model via Three Distinct Schemes. Mathematics 2024, 12, 3691. https://doi.org/10.3390/math12233691
Alomair A, Al Naim AS, Bekir A. New Abundant Analytical Solitons to the Fractional Mathematical Physics Model via Three Distinct Schemes. Mathematics. 2024; 12(23):3691. https://doi.org/10.3390/math12233691
Chicago/Turabian StyleAlomair, Abdulrahman, Abdulaziz S. Al Naim, and Ahmet Bekir. 2024. "New Abundant Analytical Solitons to the Fractional Mathematical Physics Model via Three Distinct Schemes" Mathematics 12, no. 23: 3691. https://doi.org/10.3390/math12233691
APA StyleAlomair, A., Al Naim, A. S., & Bekir, A. (2024). New Abundant Analytical Solitons to the Fractional Mathematical Physics Model via Three Distinct Schemes. Mathematics, 12(23), 3691. https://doi.org/10.3390/math12233691