
Numerical Study of an Automotive Crash Box in Carbon Fiber Reinforced Polymer Material Using Chang Failure Criteria

 ,
,  ,
,  and
and 
Abstract
1. Introduction
2. Theoretical Approach
2.1. Crash Governing Equation
- -
- denotes volume forces;
- -
- denotes the stress matrix;
- -
- denotes the density of mass;
- -
- is the vector of acceleration;
- -
- denotes virtual displacements;
- -
- denotes the vector of stress on the boundary surface.
2.2. Strain Formulation
2.3. Strain Tensor
2.4. Small Strain Formulation
2.5. Large Strain Formulation
2.6. Finite Element Formulation for Crash Analysis
- -
- denotes the determinant of the transformation between the current and the initial configuration;
- -
- denotes the intrinsic configuration;
- -
- denotes the physical configuration;
- -
- denotes the determinant of the transformation between the current configuration and the domain in the intrinsic coordinate system.
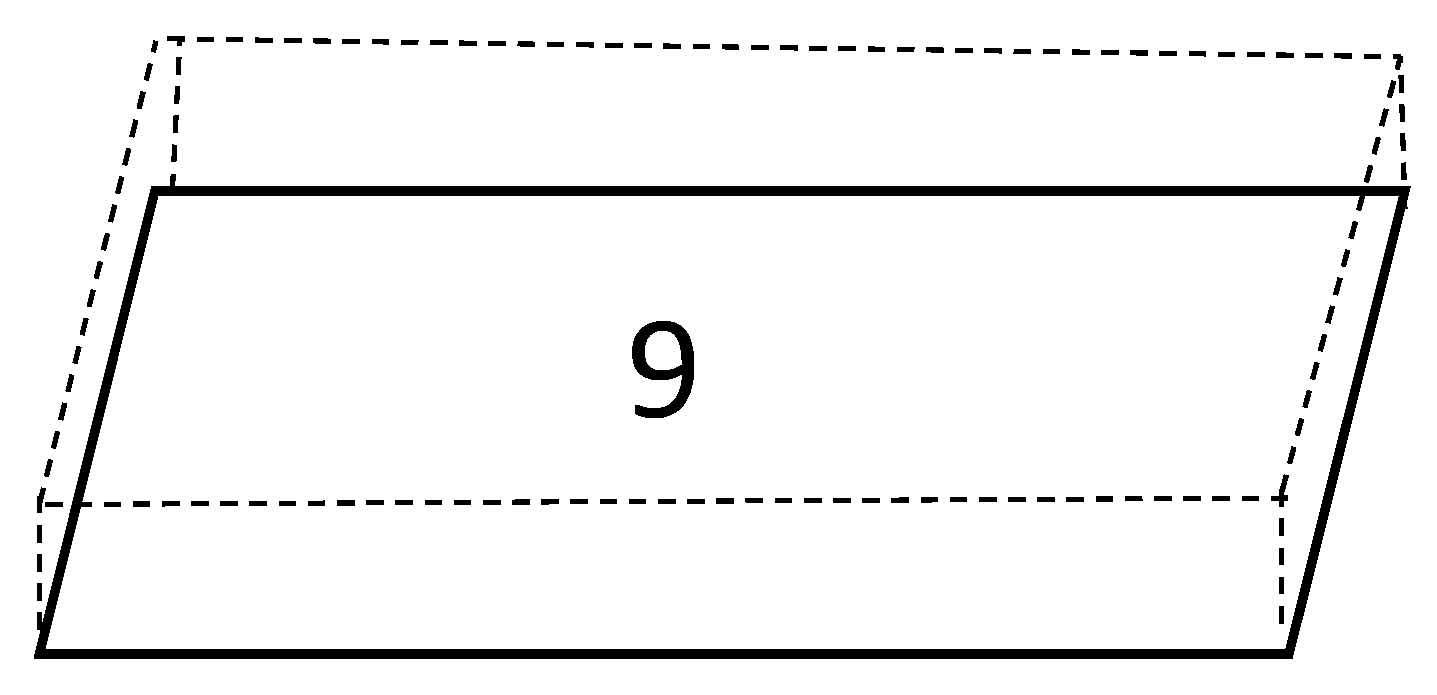
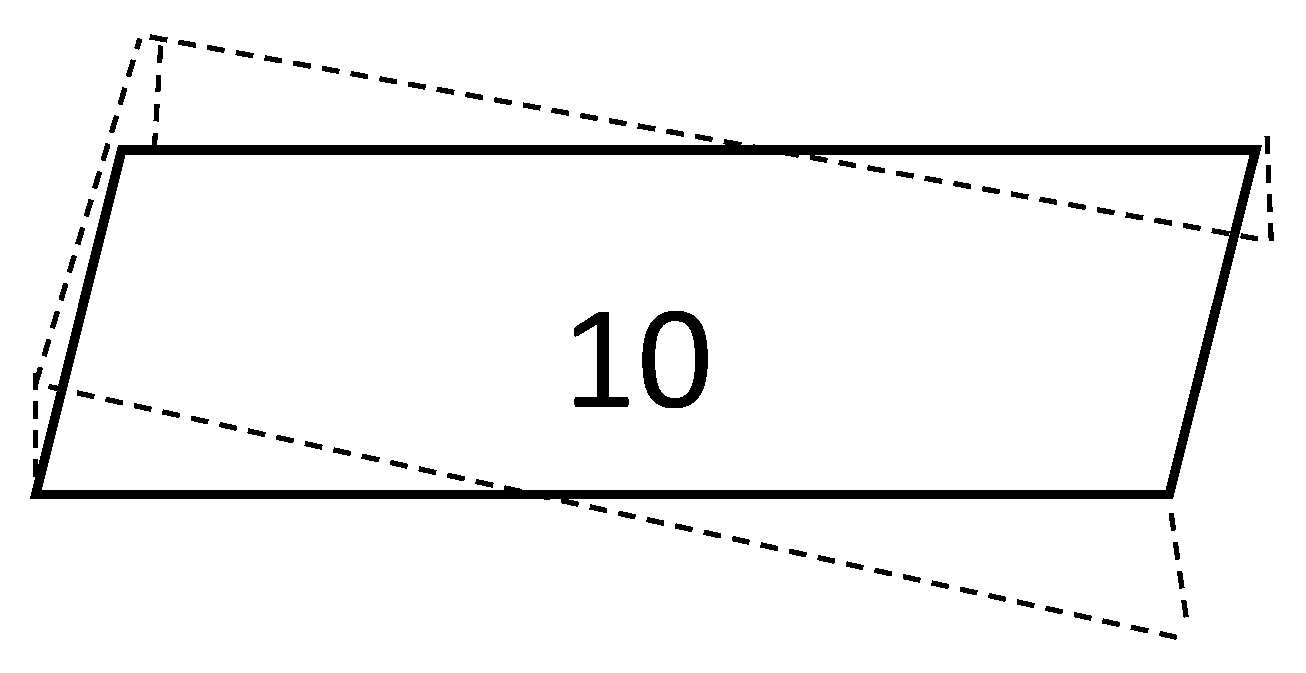
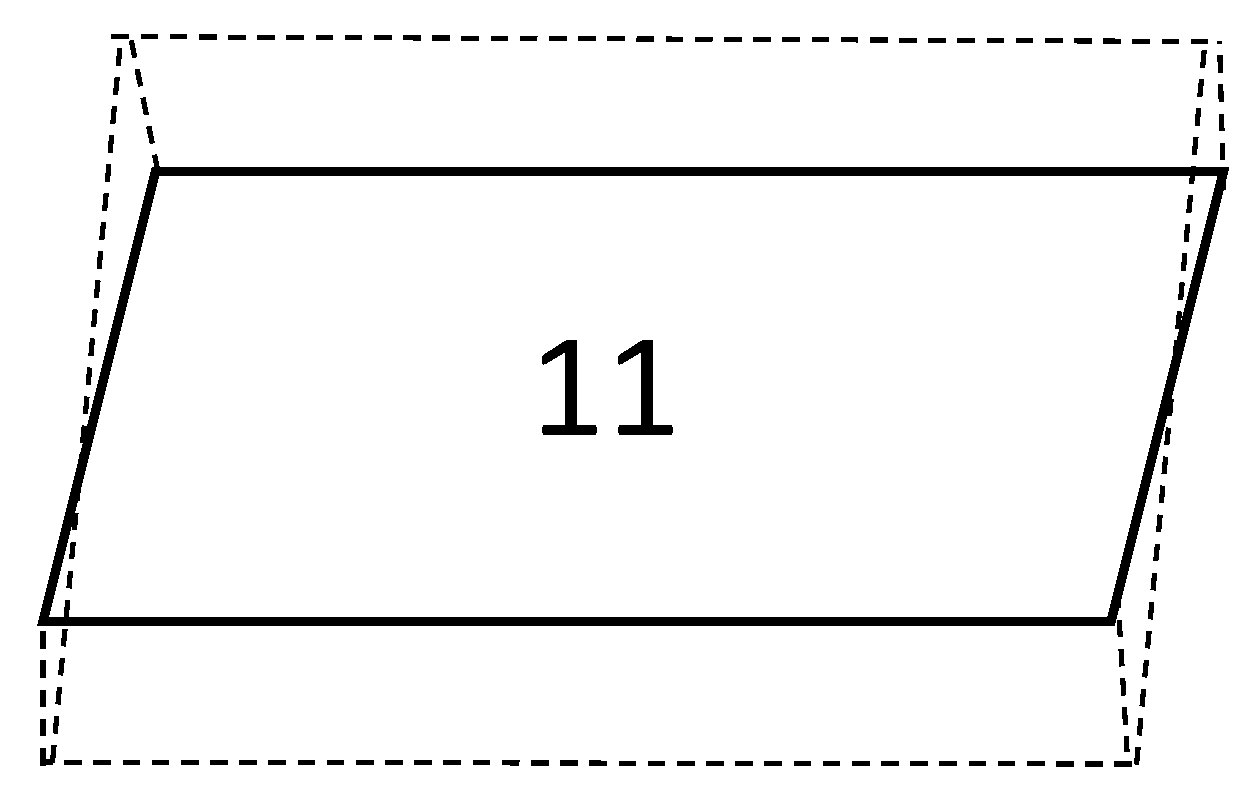
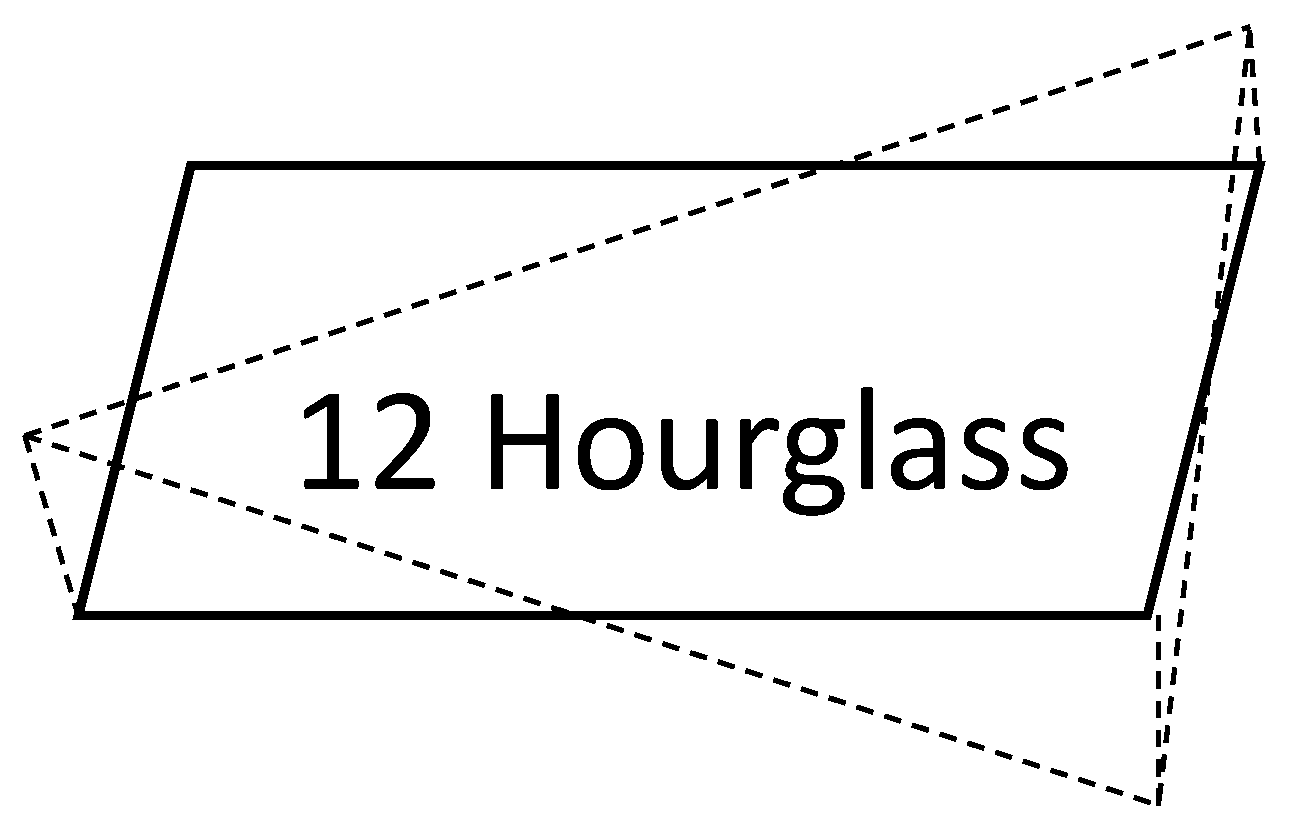
2.7. Hourglass and Technical Solutions
2.8. Dynamic Explicit Modeling and Newmark’s Method
3. CFRP Materials and Chang Criteria
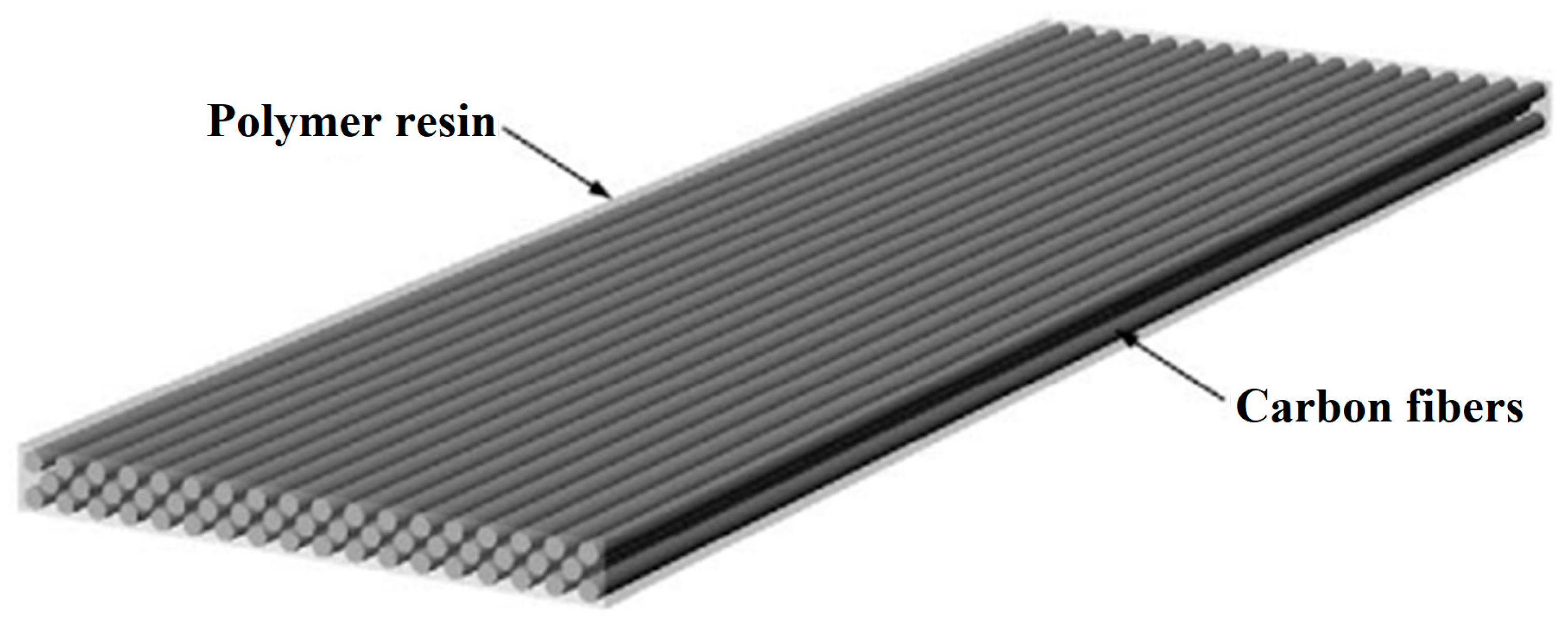
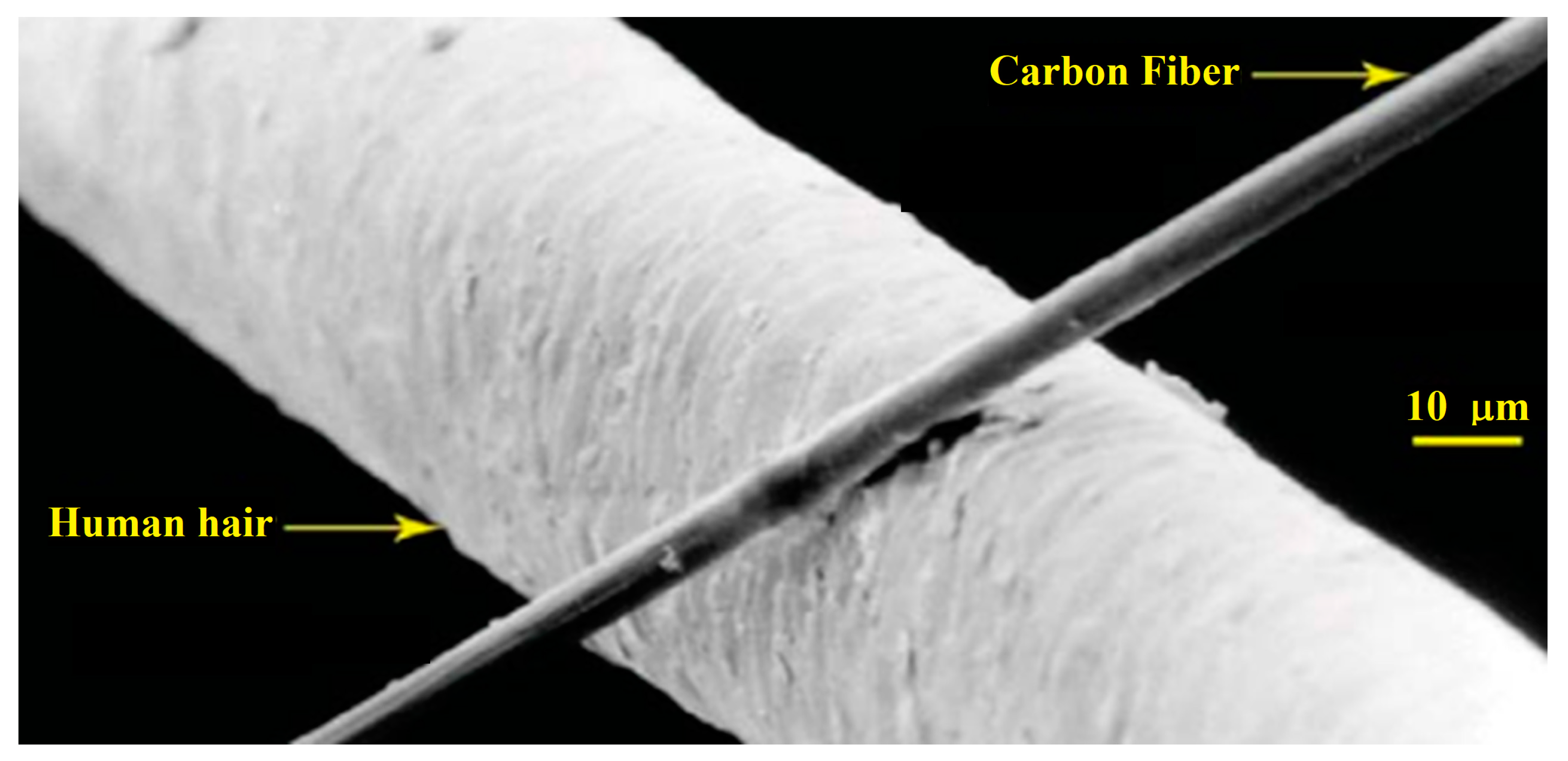
3.1. CFRP Materials
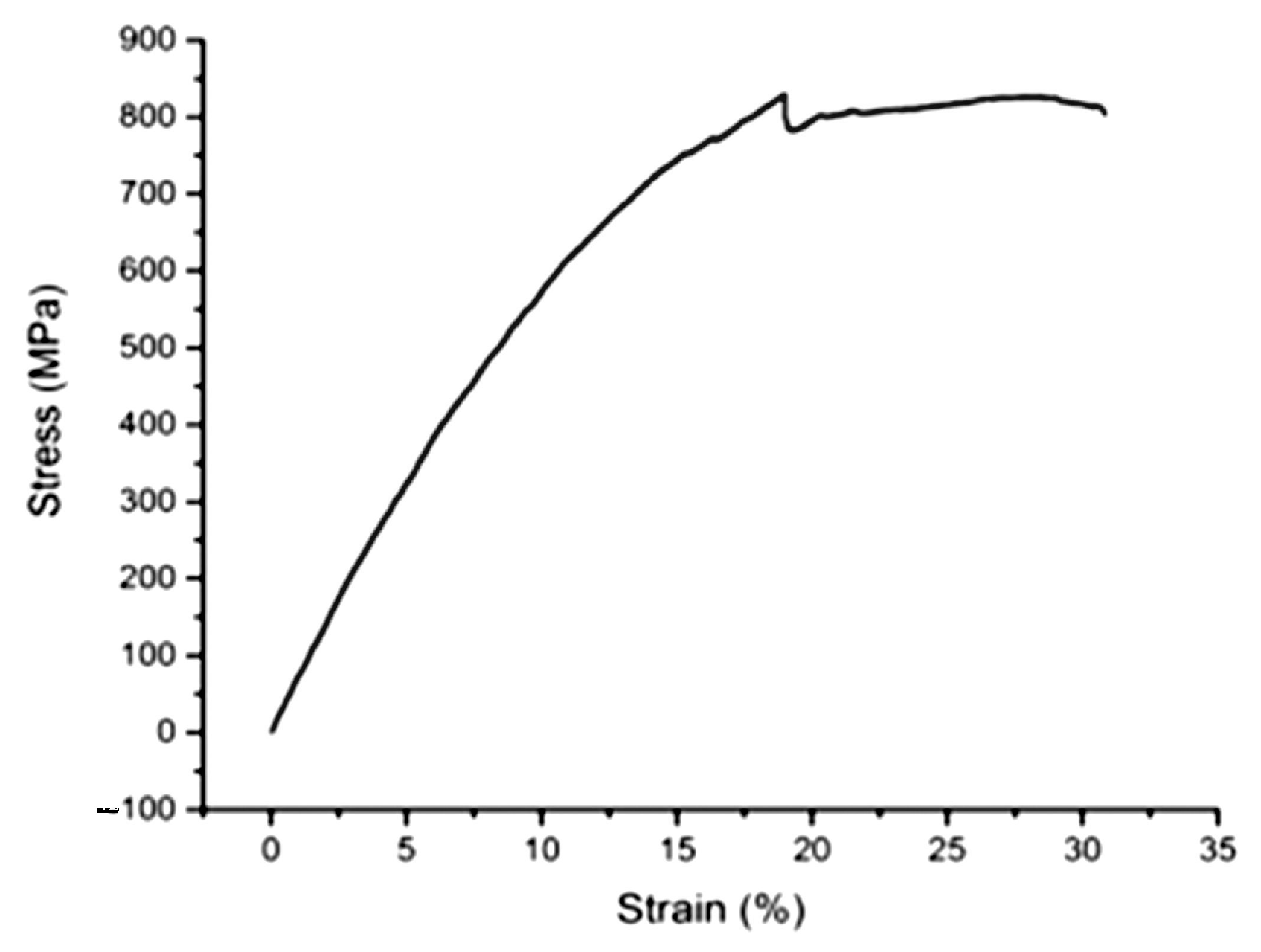
3.2. Stress and Strain Curves
- -
- The tensile stiffness and strength of the reinforcement fibers are significantly higher than those of the resin system by itself.
- -
- The compression, adhesion and stiffness of the resin are essential, as the resin prevents the fiber from buckling and preserves its straight columnar shape.
- -
- The shear is primarily managed by the resin, which disperses stresses throughout the composite.
- -
- Flexure results from the combination of shear, compression and tensile loads, with the laminate experiencing shear in its middle portion, tension on its bottom face and compression on its upper face.
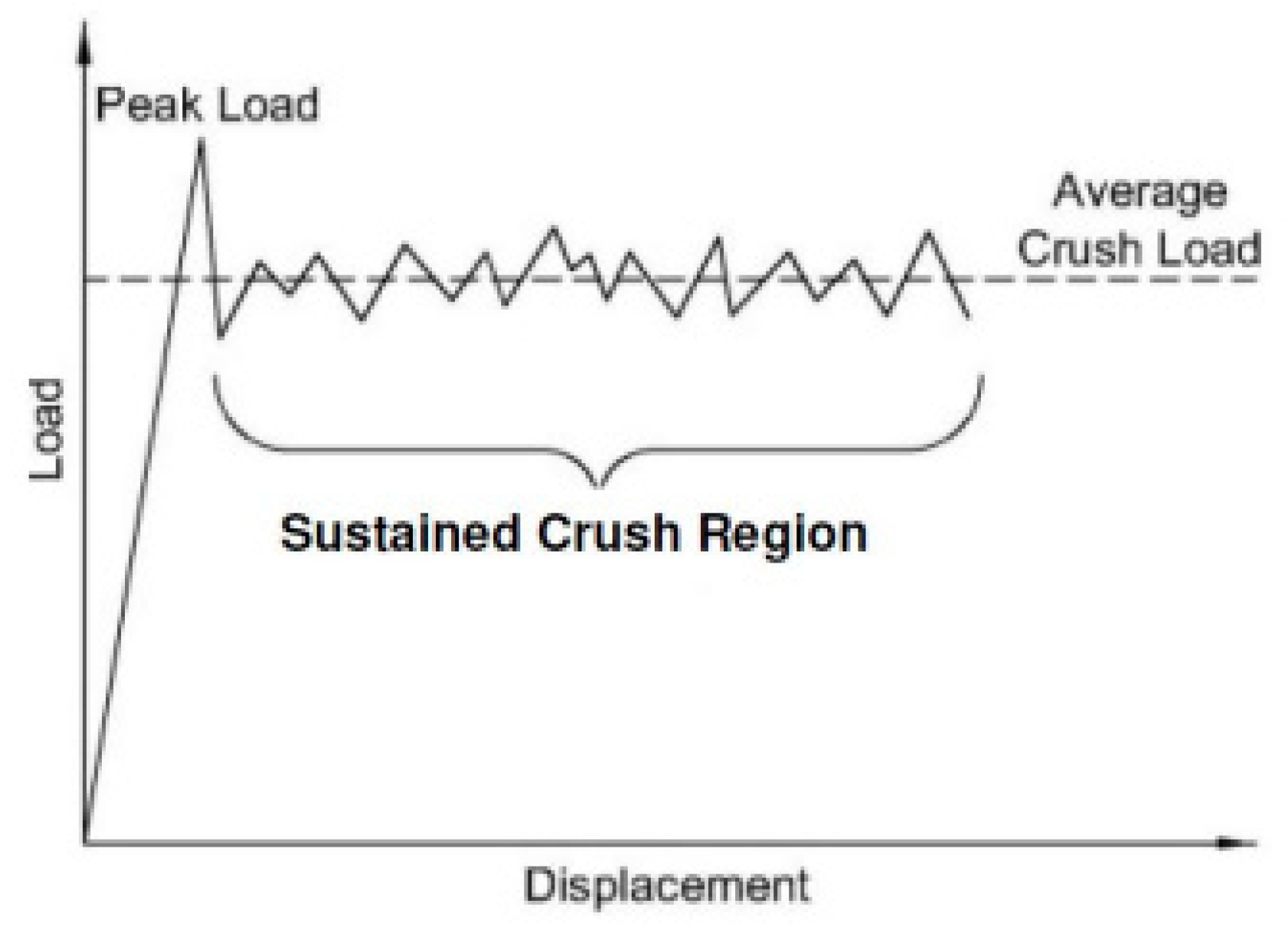
3.3. Specific Energy Absorption
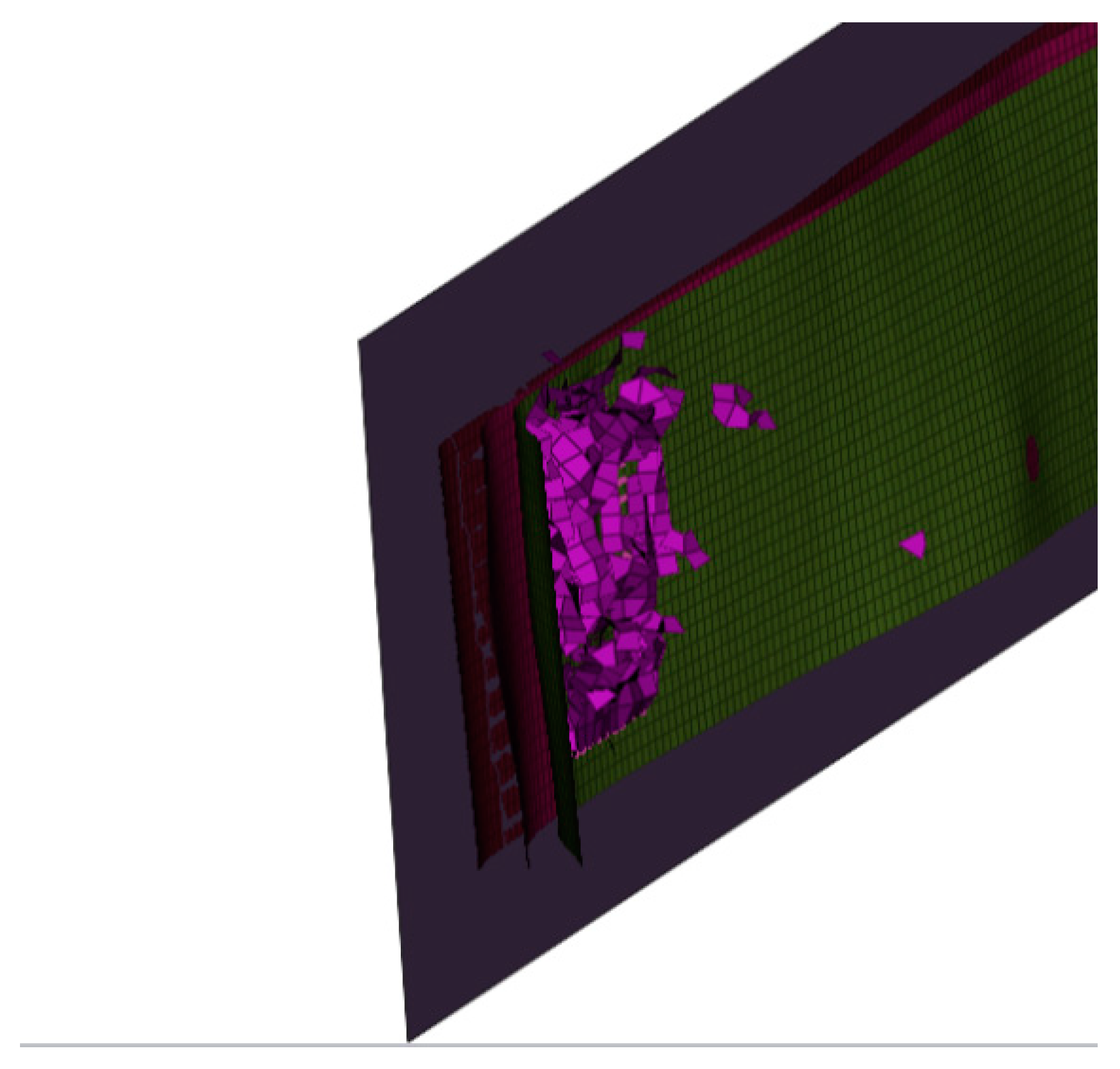
3.4. Damage Initiation and Propagation
3.5. Chang Failure Criteria
- -
- Tensile fiber mode: > 0:
- -
- Compressive fiber mode: < 0:
- -
- For matrix cracking, the failure criteria are as follows:
- Tensile matrix mode > 0:
- Compressive matrix mode < 0:
- -
- are fiber compressive/fiber tensile;
- -
- are compressive and tensile loading in direction 2;
- -
- is shear strength in composite ply plane;
- -
- is the shear scale factor, which can be determined experimentally.
- Non-failure, if 0 ≤ D < 1;
- Failure, if D = 1.
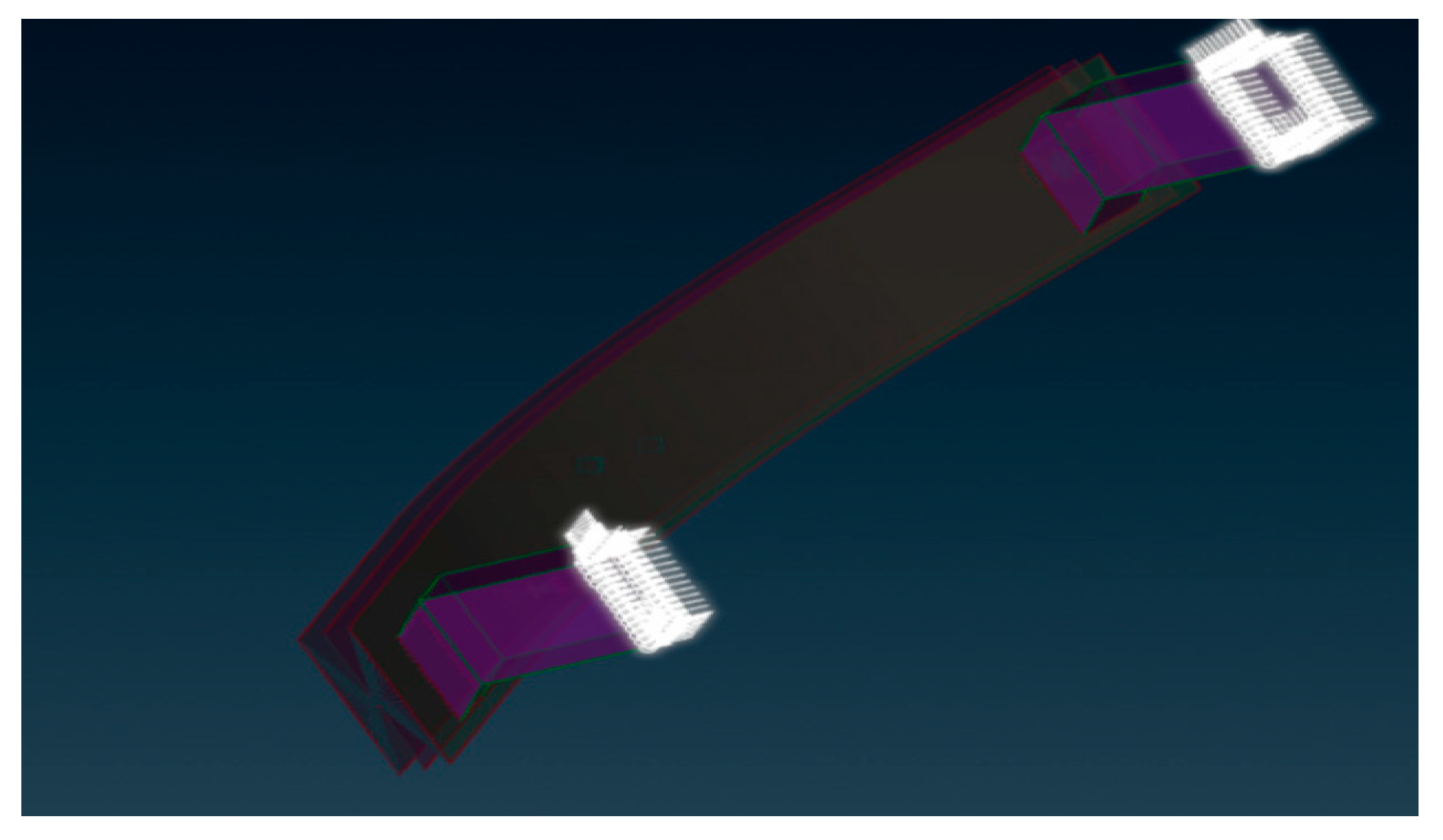
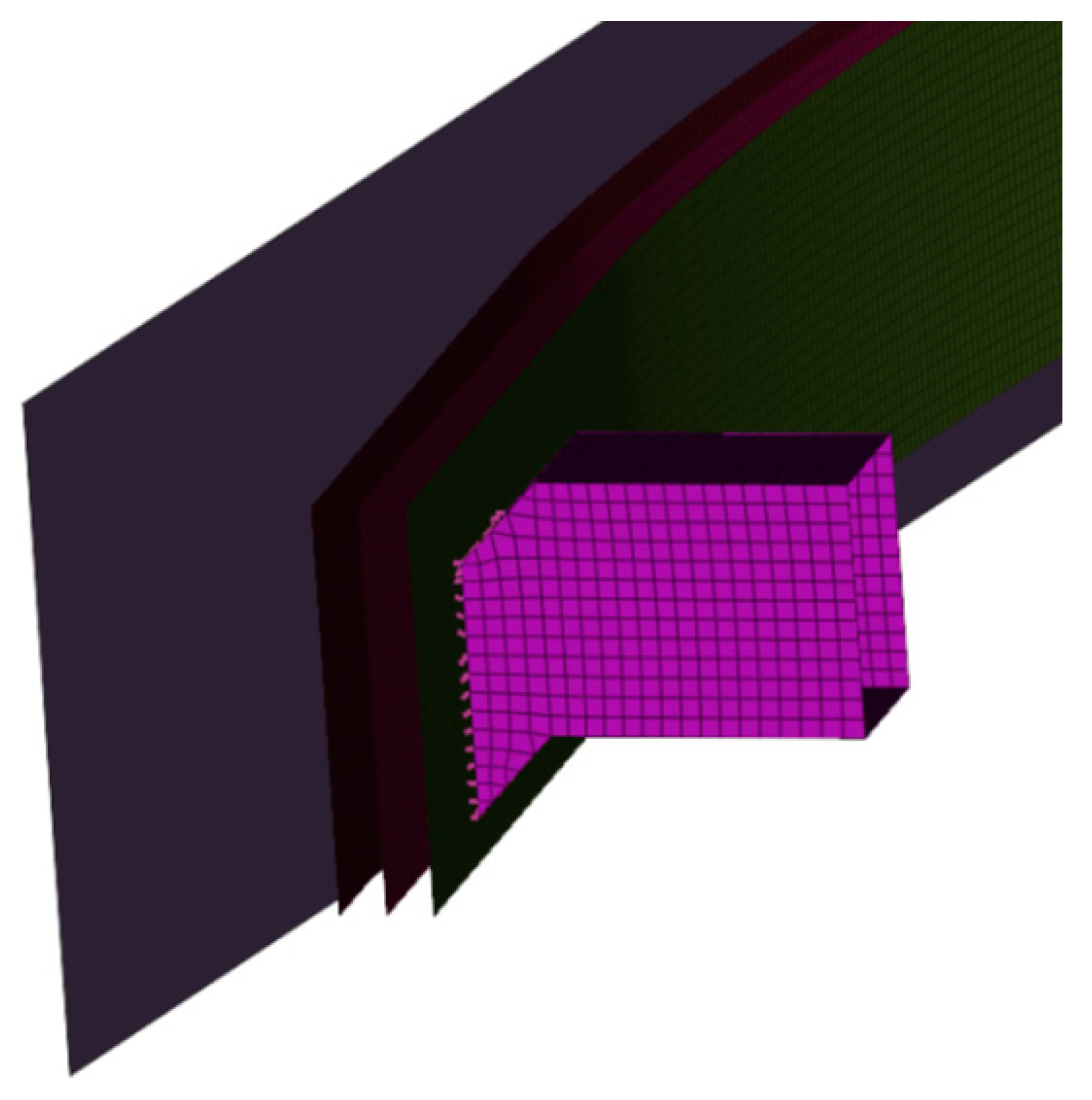
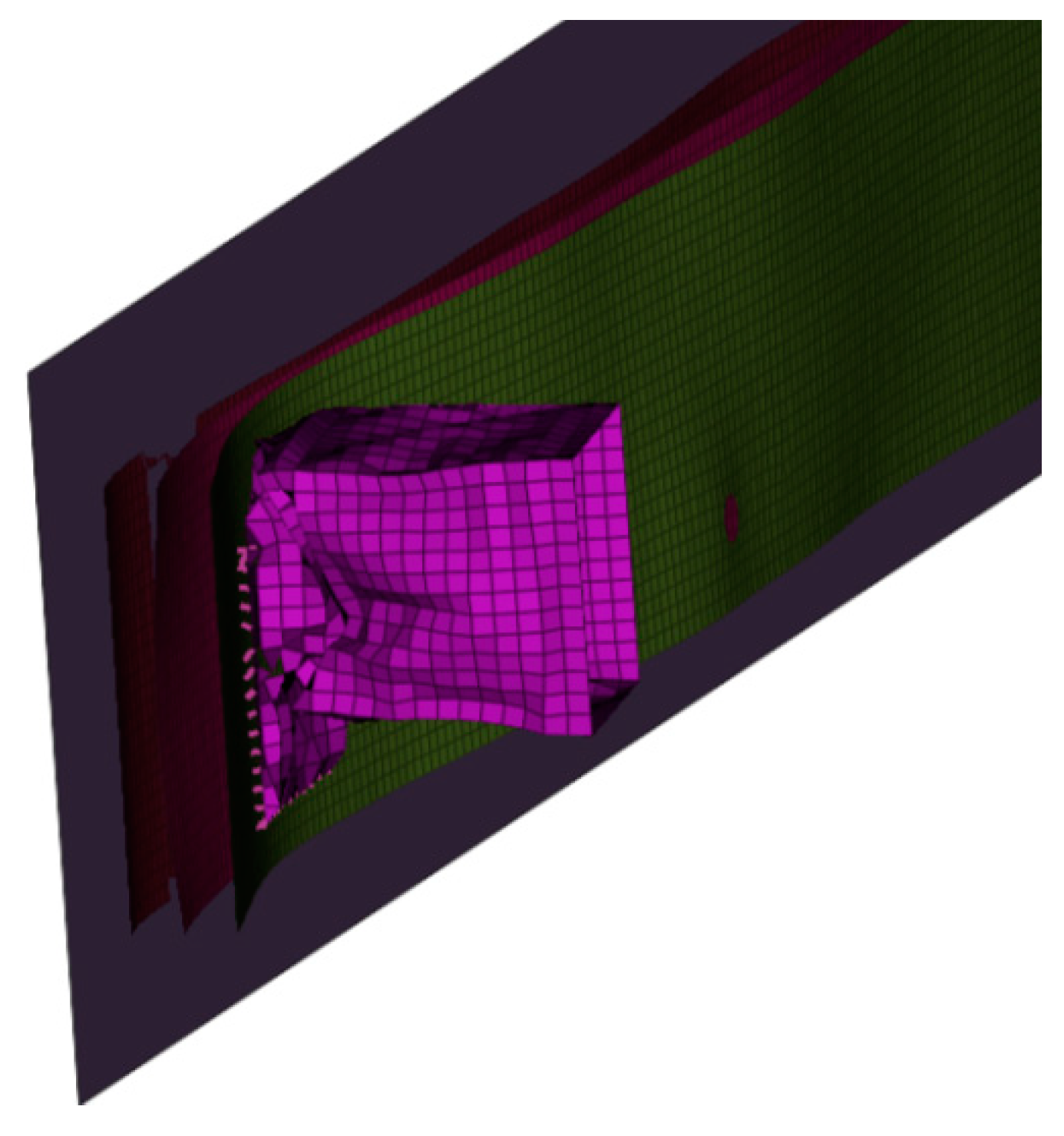
4. Numerical Simulation and Discussion
4.1. Geometry and the Material’s Input Data
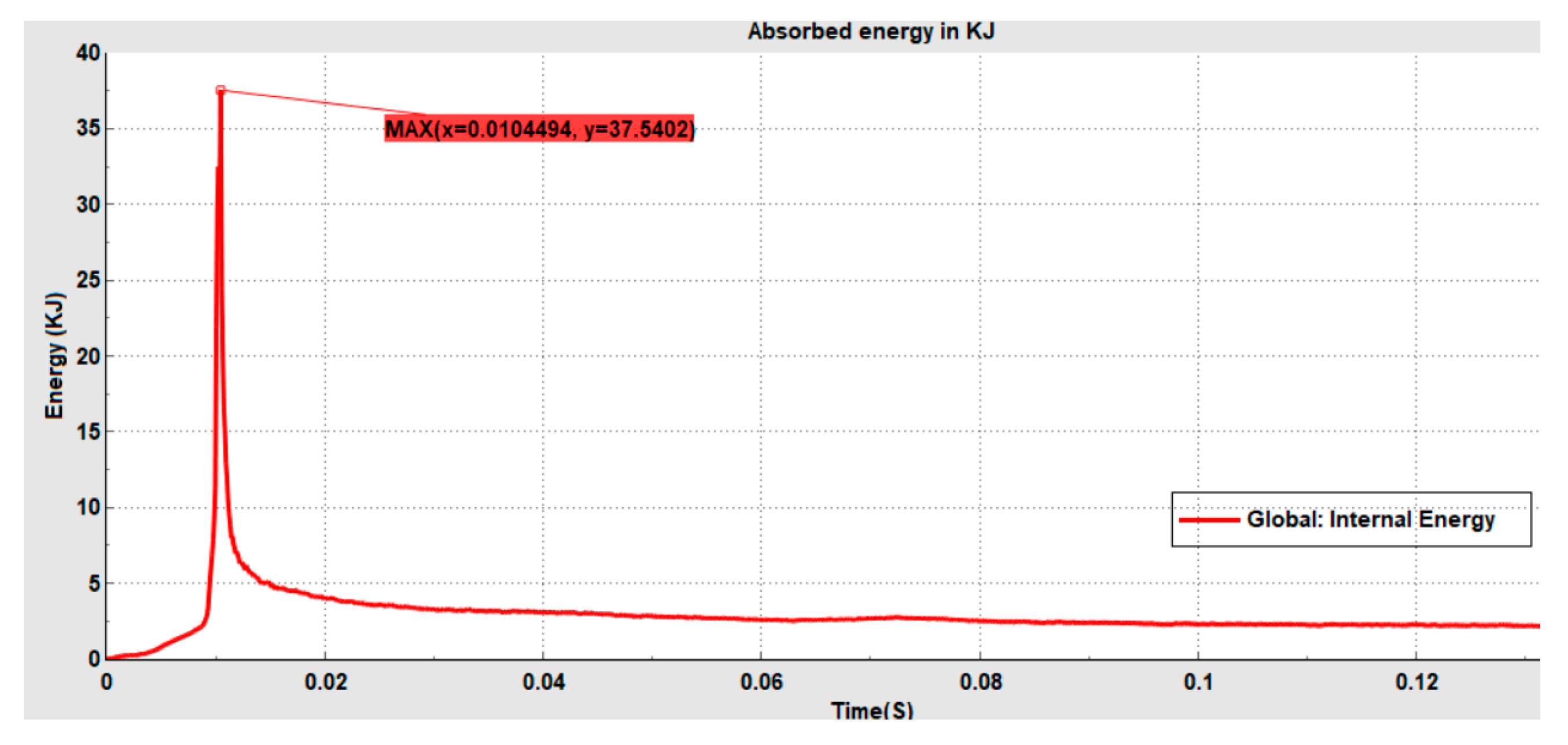
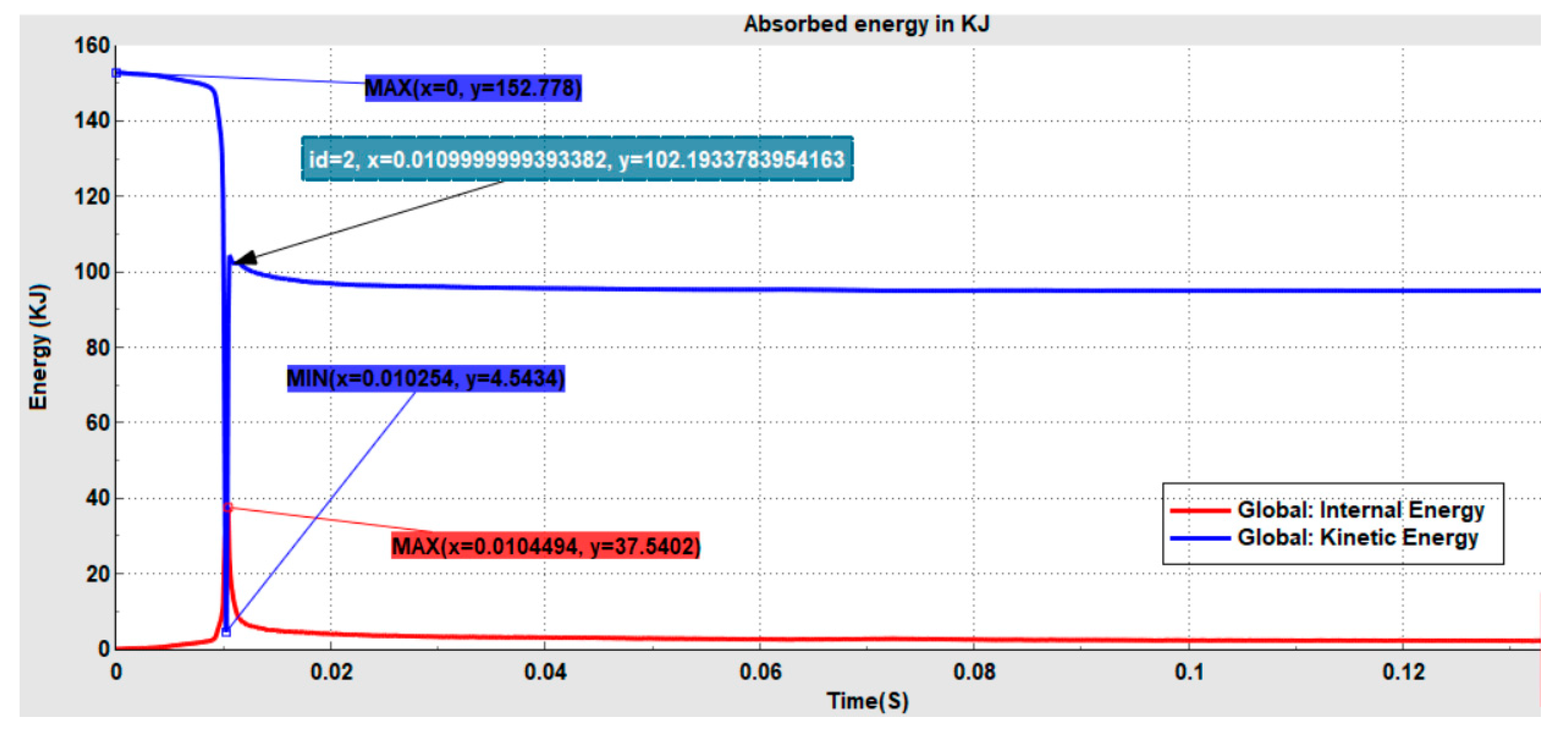
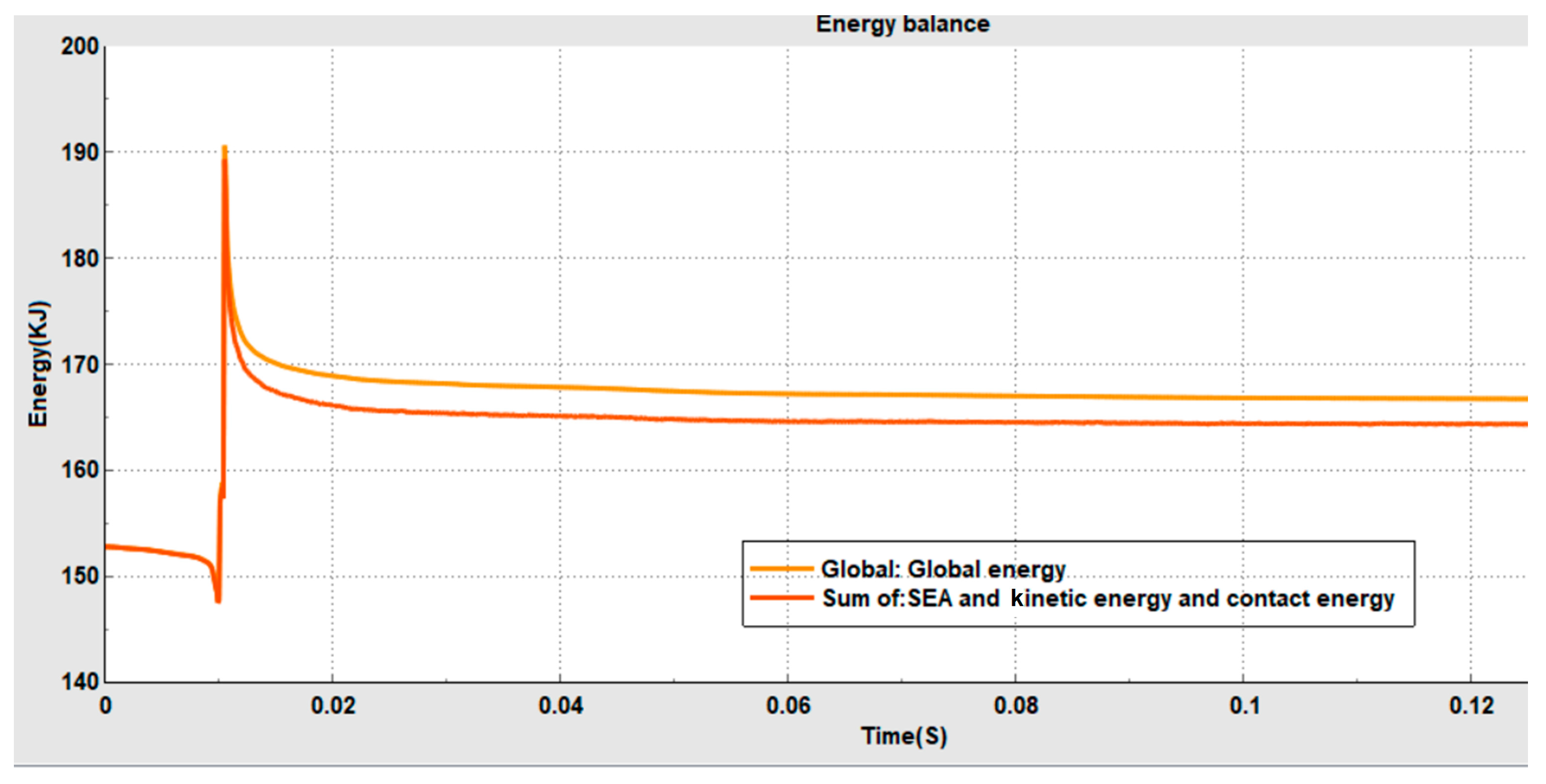
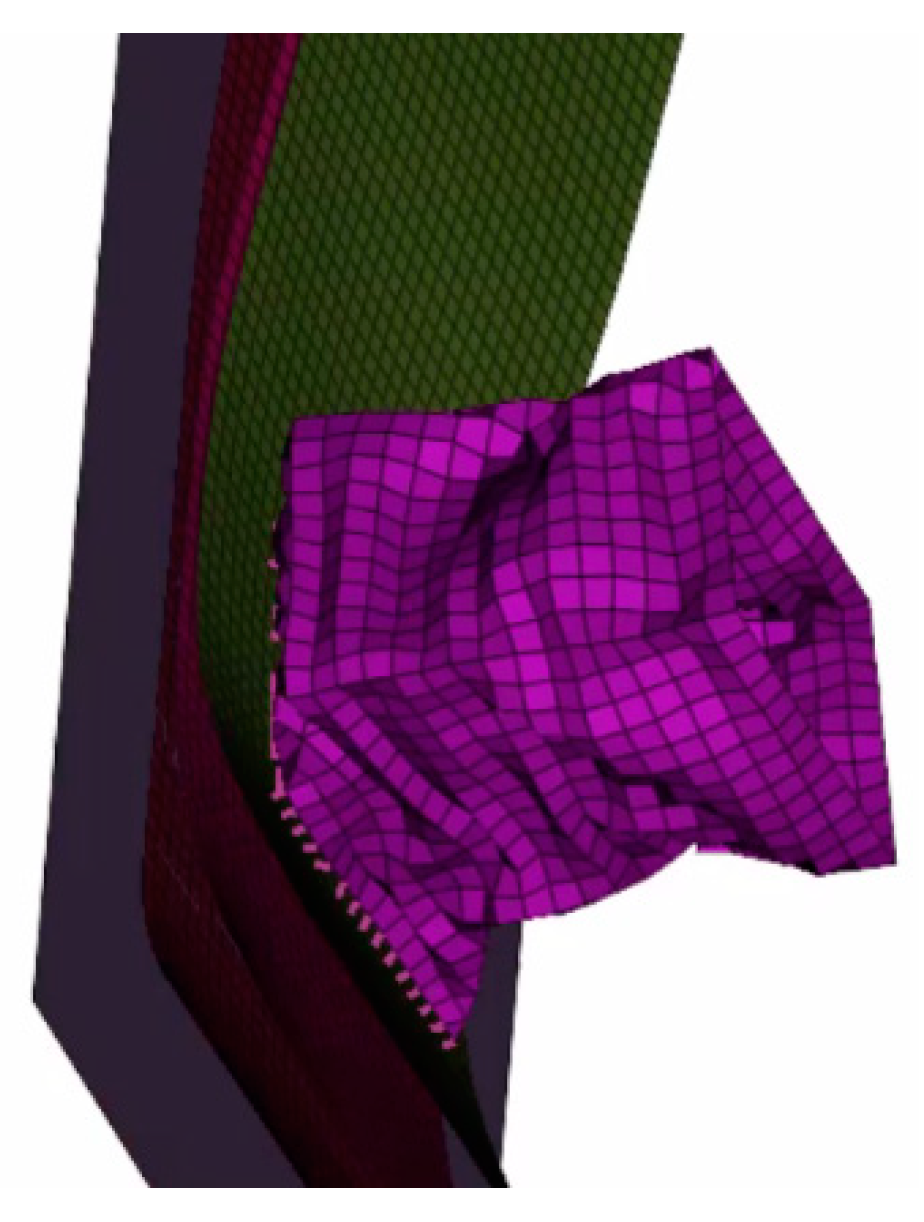
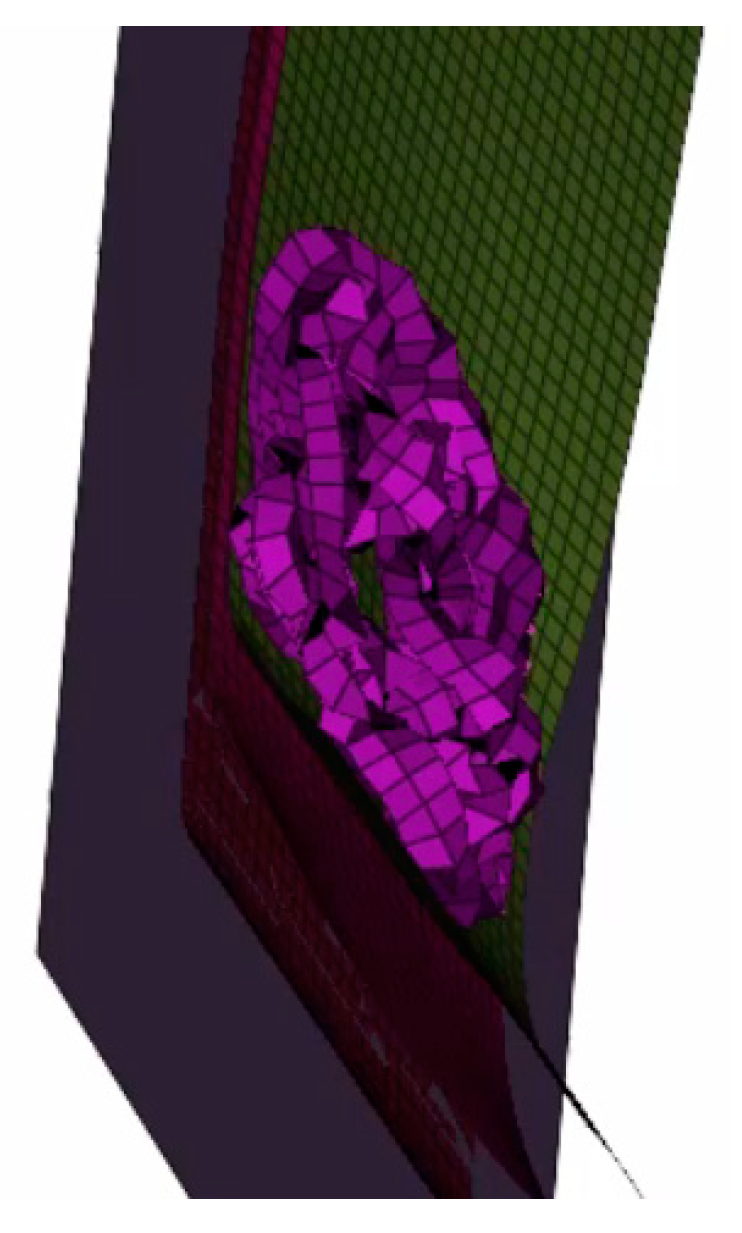
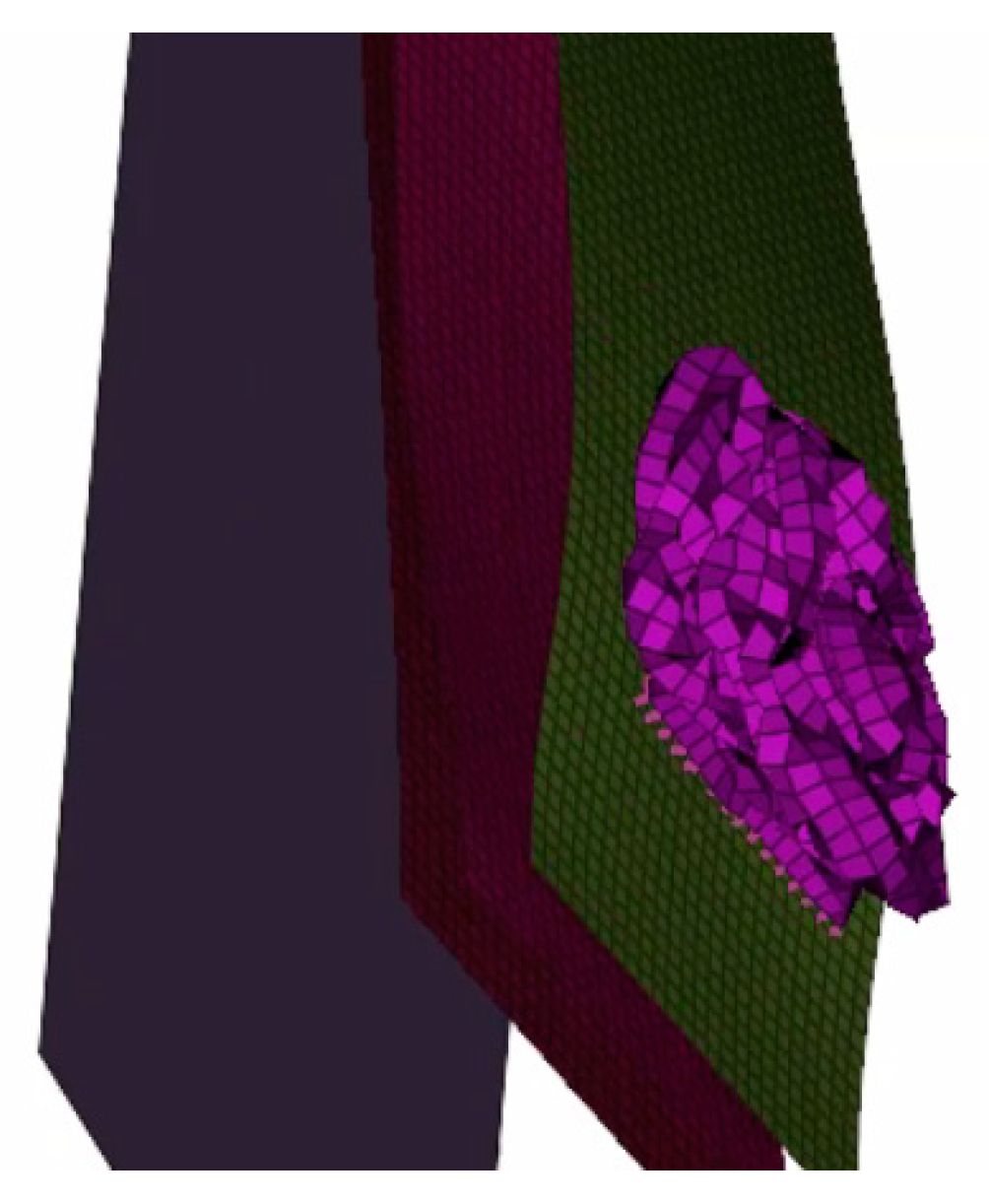
4.2. Load Case Application and Numerical Result
5. Conclusions
- Matrix damage modeling: Focuses on matrix damage mechanisms in composite materials, which is important because matrix failure can have a large influence on how CFRP materials generally perform when impacted.
- All-inclusive method: The Chang criteria consider many loading scenarios and failure modes, such as compressive and tensile stresses. This makes it possible to predict failure in different impact scenarios with greater accuracy.
- Material specificity: As the criteria are designed specifically for composite materials, they are more applicable than broader failure theories, which may not be able to explain the particular behavior of CFRP in crash scenarios.
- Predictive accuracy: Research has indicated that applying the Chang criteria can improve correlations between experimental data and findings, resulting in more reliable estimates of structural integrity and crash data.
- Progressive failure analysis is a crucial tool for understanding how damage develops in composite materials during collisions.
- The Chang criteria offer valuable information about the energy absorption and overall crashworthiness of a material.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Mehler, B.; Reimer, B.; Lammers, V.; D’ambrosio, L.A.; Goughlin, J.F. The validity of driving simulation for assessing differences between in vehicle informational interfaces: A comparison with field testing. Ergonomics 2010, 53, 404–420. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S.; Bharj, R.S. Emerging composite material use in current electric vehicle: A review. Mater. Today Proc. 2018, 5, 27946–27954. [Google Scholar] [CrossRef]
- Halimah, P.N.; Rahardian, S.; Budiman, B. Battery Cells for Electric Vehicles. Int. J. Sustain. Transp. Technol. 2019, 2, 54–57. [Google Scholar] [CrossRef]
- El-Mekkaoui, J.; Elkhalfi, A.; Elakkad, A. Resolution of stokes equations with the Ca,b boundary condition using mixed finite element method. Trans. Math. 2013, 12, 586–597. [Google Scholar]
- Lanzerath, H.; Nowack, N.; Mestres, E. Simulation Tool Including Failure for Structural Adhesives in Full-Car Crash Models; Technical Report; SAE: Pittsburgh, PA, USA, 2009. [Google Scholar]
- van Ratingen, M.; Williams, A.; Lie, A.; Seeck, A.; Castaing, P.; Kolke, R.; Adriaenssens, G.; Miller, A. The European New Car Assessment Programme: A historical review. Chin. J. Traumatol. 2016, 19, 63–69. [Google Scholar] [CrossRef] [PubMed]
- Ciampaglia, A.; Patruno, L.; Ciardiello, R. Design of a Lightweight Origami Composite Crash Box: Experimental and Numerical Study on the Absorbed Energy in Frontal Impacts. J. Compos. Sci. 2024, 8, 224. [Google Scholar] [CrossRef]
- Hattori, G.; Rojas-Díaz, R.; Sukumar, A.S.; García-Sánchez, F. New anisotropic crack-tip enrichment functions for the extended finite element method. Comput. Mech. 2012, 50, 591–601. [Google Scholar] [CrossRef]
- Barnes, G.; Coles, I.; Roberts, R.; Adams, D.O.; Garner, D.M. Crash Safety Assurance Strategies for Future Plastic and Composite Intensive Vehicles (PCIVS); Technical Report; U.S. Department of Transportation: Cambridge, MA, USA, 2010.
- Abdullah, N.A.; Sani, M.S.; Salwani, M.S.; Husain, N.A. A review on crashworthiness studies of crash box structure. Thin-Walled Struct. 2020, 153, 106795. [Google Scholar] [CrossRef]
- Liu, H.; Huang, J.; Zhang, W. Numerical algorithm based on extended barycentric Lagrange interpolant for two dimensional integro-differential equations. Appl. Math. Comput. 2021, 396, 125931. [Google Scholar] [CrossRef]
- Chukwuemeke, W.I.; Chidozie, E. A review of the crashworthiness performance of energy absorbing composite structure within the context of materials, manufacturing and maintenance for sustainability. Compos. Struct. 2021, 257, 113081. [Google Scholar]
- Xue, J.; Wang, W.X.; Zhang, J.Z.; Wu, S.J. Progressive failure analysis of the fiber metal laminates based on chopped carbon fiber strands. J. Reinf. Plast. Compos. 2015, 34, 364–376. [Google Scholar] [CrossRef]
- Zhang, Z.; Niemi, E. A new failure criterion for the Gurson-Tvergaard dilational constitutive model. Int. J. Fract. 1994, 70, 321–334. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Y.; Cui, X.; Said, Z.; Sharma, S.; Liu, M.; Gao, T.; Zhou, Z.; Wang, X.; Li, C. Mechanical behavior and modeling of grinding force: A comparative analysis. J. Manuf. Process. 2023, 102, 921–954. [Google Scholar] [CrossRef]
- Teodorescu-Draghicescu, H.; Vlase, S. Homogenization and averaging methods to predict elastic properties of pre-impregnated composite materials. Comput. Mater. Sci. 2011, 50, 1310–1314. [Google Scholar] [CrossRef]
- Dag, S.; Arman, E.; Yildirim, B. Computation of thermal fracture parameters for orthotropic functionally graded materials using Jk–integral. Int. J. Solids Struct. 2010, 47, 3480–3488. [Google Scholar] [CrossRef]
- Bui, T.Q. Extended isogeometric dynamic and static fracture analysis for cracks in piezoelectric materials using NURBS. Comput. Methods Appl. Mech. Eng. 2015, 295, 470–509. [Google Scholar] [CrossRef]
- Xu, X.; Ou, J.P. Force identification of dynamic systems using virtual work principle. J. Sound Vib. 2015, 337, 71–94. [Google Scholar] [CrossRef]
- Zhiqing, C.; Reagan, P.H.; Sieveka, S. Experiences in reverse-engineering of a finite element automobile crash model. Finite Elem. Anal. Des. 2001, 37, 843–860. [Google Scholar]
- Yang, H.; Shao, L.; Ou, J.; Zhou, Z. A Novel Smart CFRP Cable Based on Optical Electrical Co-Sensing for Full-Process Prestress Monitoring of Structures. Sensors 2023, 23, 5261. [Google Scholar] [CrossRef]
- Essam, M.; Almitani, K. Detecting Damage in Carbon Fibre Composites using Numerical Analysis and Vibration Measurements. Lat. Am. J. Solids Structures 2021, 18, e362. [Google Scholar]
- Bai, B.; Ci, H.; Lei, H.; Cui, Y. A local integral-generalized finite difference method with mesh-meshless duality and its application. Eng. Anal. Bound. Elem. 2022, 139, 14–39. [Google Scholar] [CrossRef]
- McLachlan, R.I. Spatial Discretization of Partial Differential Equations with Integrals. IMA J. Numer. Anal. 2003, 23, 645–664. [Google Scholar] [CrossRef]
- Moes, N.; Belytschko, T. X-FEM, de nouvelles frontières pour les éléments finis. Eur. J. Comput. Mech. 2012, 11, 305–318. [Google Scholar] [CrossRef]
- Meo, M.; Morris, A.J.; Vignjevic, R.; Marengo, G. Numerical simulations of low-velocity impact on an aircraft sandwich panel. Compos. Struct. 2003, 62, 353–360. [Google Scholar]
- Chang, F.K.; Chang, K.Y. A Progressive Damage Model for Laminated Composites Containing Stress Concentrations. J. Compos. Mater. 1987, 21, 834–855. [Google Scholar] [CrossRef]
- Thanh, N.; Josef, K. Rotation free isogeometric thin shell analysis using PHT-splines. Comput. Methods Appl. Mech. Eng. 2011, 200, 3410–3424. [Google Scholar] [CrossRef]
- Carello, M.; Airale, A.; Ferraris, A.; Messana, A.; Sisca, L. Static Design and Finite Element Analysis of Innovative CFRP Transverse Leaf Spring. Appl. Compos. Mater. 2017, 27, 1493–1508. [Google Scholar] [CrossRef]
- Qu, C.J.; Xu, P.; Yao, S.G.; Yang, C.X.; Jin, X.H. Crash Stability Analysis and Multi-Objective Optimization of Oriented Energy-Absorbing Structure for Locomotive. Int. J. Struct. Stab. Dyn. 2023, 23, 2350175. [Google Scholar] [CrossRef]
- Shao, J.; Liu, N.; Zheng, Z. Numerical comparison between Hashin and Chang-Chang failure criteria in terms of inter-laminar damage behavior of laminated composite. Mater. Res. Express 2021, 8, 2053–2159. [Google Scholar] [CrossRef]
- Isaac, M.D. Constitutive behavior and failure criteria for composites under static and dynamic loading. Meccanica 2015, 50, 429–442. [Google Scholar]
- Rizal, K.; Syaifudin, A. Evaluation of Crash Energy Management of the First-Developed High-Speed Train in Indonesia. J. Eng. Technol. Sci. 2023, 55, 235–246. [Google Scholar] [CrossRef]
- Nguyen, V.P.; Bordas, S.; Rabczuk, T. Isogeometric analysis: An overview and computer implementation aspects. Math. Comput. Simul. 2015, 117, 89–116. [Google Scholar] [CrossRef]
- Sundeep, M.; Harpreet, A.; Medha, V. Performance and Design of Steel Structures Reinforced with FRP Composites: A state-of-the-art review. Eng. Fail. Anal. 2023, 138, 106371. [Google Scholar]
- Chang, S.Y. Studies of Newmark method for solving nonlinear systems: (I) basic analysis. J. Chin. Inst. Engineers 2004, 27, 651–662. [Google Scholar] [CrossRef]
- Mamalis, A.G.; Manolakos, D.E.; Ioannidis, M.B.; Papapostolou, D.P. On the response of thin-walled cfrp composite tubular components subjected to static and dynamic axial compressive loading: Experimental. Compos. Struct. 2005, 69, 407–420. [Google Scholar] [CrossRef]
- Barros, F.; Silva, R. Extended isogeometric analysis: A two-scale coupling FEM/IGA for 2D elastic fracture problems. Comput. Mech. 2023, 73, 639–665. [Google Scholar]
- Johnson, A.F. Modelling fabric reinforced composites under impact loads. Compos. Part A Appl. Sci. Manuf. 2001, 32, 1197–1206. [Google Scholar] [CrossRef]
- Pao, Y.H.; Wang, L.S.; Chen, K.C. Principle of Virtual Power for thermomechanics of fluids and solids with dissipation. Int. J. Eng. Sci. 2011, 49, 1502–1516. [Google Scholar] [CrossRef]
- Koubaiti, O.; El-Mekkaoui, J.; Elkhalfi, A. Complete study for solving Navier-Lamé equation with new boundary condition using mini element method. Int. J. Mechanics 2018, 12, 46–56. [Google Scholar]
- Hughes, T.; Bazilevs, Y. Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Comput. Methods Appl. Mech. Eng. 2005, 194, 4135–4195. [Google Scholar] [CrossRef]
- Berrada-Gouzi, M.; El Khalfi, A.; Vlase, S.; Scutaru, M.L. X-IGA Used for Orthotropic Material Crack Growth. Materials 2024, 17, 3830. [Google Scholar] [CrossRef] [PubMed]
- Montassir, S.; Moustabchir, H.; Elkhalfi, A.; Scutaru, M.L.; Vlase, S. Fracture modelling of a cracked pressurized cylindrical structure by using extended iso-geometric analysis (X-IGA). Mathematics 2021, 9, 2990. [Google Scholar] [CrossRef]
- El Fakkoussi, S.; Moustabchir, H.; Elkhalfi, A.; Pruncu, C.I. Application of the extended isogeometric analysis (X-IGA) to evaluate a pipeline structure containing an external crack. J. Eng. 2018, 2018, 4125765. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material’s Property | Values |
|---|---|
| Young’s modulus longitudinal direction | 56,275 MPa |
| Young’s modulus transverse direction | 54,868 MPa |
| Shear modulus | 4211 MPa |
| Density | 1.52 × kg/ |
| Longitudinal compressive strength | 570 MPa |
| Transverse compressive strength | 355 MPa |
| Longitudinal tensile strength | 917.38 MPa |
| Transverse tensile strength | 775.38 MPa |
| Shear strength | 132.5 MPa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gouzi, M.B.; EL Fakkoussi, S.; Khalfi, A.E.; Vlase, S.; Scutaru, M.L. Numerical Study of an Automotive Crash Box in Carbon Fiber Reinforced Polymer Material Using Chang Failure Criteria. Mathematics 2024, 12, 3673. https://doi.org/10.3390/math12233673
Gouzi MB, EL Fakkoussi S, Khalfi AE, Vlase S, Scutaru ML. Numerical Study of an Automotive Crash Box in Carbon Fiber Reinforced Polymer Material Using Chang Failure Criteria. Mathematics. 2024; 12(23):3673. https://doi.org/10.3390/math12233673
Chicago/Turabian StyleGouzi, Mohammed Berrada, Said EL Fakkoussi, Ahmed El Khalfi, Sorin Vlase, and Maria Luminita Scutaru. 2024. "Numerical Study of an Automotive Crash Box in Carbon Fiber Reinforced Polymer Material Using Chang Failure Criteria" Mathematics 12, no. 23: 3673. https://doi.org/10.3390/math12233673
APA StyleGouzi, M. B., EL Fakkoussi, S., Khalfi, A. E., Vlase, S., & Scutaru, M. L. (2024). Numerical Study of an Automotive Crash Box in Carbon Fiber Reinforced Polymer Material Using Chang Failure Criteria. Mathematics, 12(23), 3673. https://doi.org/10.3390/math12233673