1. Introduction
According to the theory of linear viscoelasticity, a material under a unidirectional loading can be represented as a linear system where either stress, , or strain, , serve as input (excitation function) or output (response function), respectively. Considering that stress and strain are scaled with respect to suitable reference states, the input in a creep test is , while in a relaxation test, it is , where denotes the Heaviside function. The corresponding outputs are described by time-dependent material functions. For the creep test, the output is defined as the creep compliance , and for the relaxation test, the output is defined as the relaxation modulus . Experimentally, is always non-decreasing and non-negative, while is non-increasing and non-negative.
According to Gross [
1], it is quite common to require the existence of non-negative retardation
and relaxation
spectra for the material functions
and
, respectively. These functions are defined as ([
2], Equation (2.30b))
From a mathematical point of view, these requirements are equivalent to state that
is a Bernstein function and that
is a completely monotone (CM) function. We recall that the derivative of a Bernstein function is a CM function, and that any CM function can be expressed as the Laplace transform of a non-negative function, that we refer to as the corresponding spectral function or simply spectrum. For details on Bernstein and CM functions, we refer the reader to the excellent treatise by Schilling et al. [
3].
In order to calculate
and
from
and
, Gross introduced the frequency spectral functions
and
, defined as ([
2], Equation (2.32))
where
. Therefore, taking the scaling factors
, we have
and
In the existing literature, many viscoelastic models for the material functions
and
have been proposed in order to describe the experimental evidence. The first pioneer to work on linear viscoelastic models was Richard Becker (1887–1955). In 1925, Becker introduced a creep law to deal with the deformation of particular viscoelastic and plastic bodies on the basis of empirical arguments [
4]. This creep law has found applications in ferromagnetism [
5], and in dielectrics [
1]. This model has been generalized in [
6] by using a generalization of the exponential integral based on the Mittag–Leffler function. In 1956, Cinna Lomnitz (1925–2016) introduced a logarithmic creep law to treat the creep behaviour of igneous rocks [
7]. This law was also used by Lomnitz to explain the damping of the free core nutation of the Earth [
8], and the behavior of seismic S-waves [
9]. In order to generalize the Lomnitz model, Harold Jeffreys introduced a new model depending on a parameter
in 1958 [
10]. When
, the Jeffreys model is reduced to the Lomnitz model. In ([
2], Section 2.10.1), the Jeffreys model is extended to negative values of
. Very recently, the authors have proposed a new model based on the Lambert
W function [
11]. In order to evaluate the principal features of this new model, the main aim of the paper is to compare it with respect to the Becker and Lomnitz models, since these classical models have several applications and generalizations in the literature.
This paper is organized as follows. In
Section 2, we introduce some basic concepts of linear viscoelasticity that will be used throughout the article. We present the dimensionless relaxation modulus
, as well as the frequency spectral functions
and
in terms of the Laplace transform.
Section 3,
Section 4 and
Section 5 are devoted to the derivation of analytical expressions for
, as well as
and
in Becker, Lomnitz, and Lambert models, respectively. As far as the authors are aware, the closed-form expressions found for
in Becker and Lomnitz models are novel. Also, the integral expressions found for
and
in the Lambert model are also novel. In
Section 6, we graphically compare the models considered here. Finally, we present our conclusions in
Section 7.
2. Essentials of Linear Viscoelasticity
In Earth rheology, the law of creep is usually written as
where
t is time,
is the unrelaxed compliance,
q is a positive dimensionless material constant, and
is the dimensionless creep function. Note that the scaling factor
q takes into account the effect of different types of materials following the same creep model, i.e., the same dimensionless creep function
. Since
, we have
The dimensionless relaxation function is defined as
where
is the relaxation modulus. Note that
acts as a scaling factor for the dimensionless relaxation modulus
. This dimensionless relaxation function obeys the Volterra integral equation ([
2], Equation (2.89)):
Assuming
, the solution of (
8) is (see
Appendix A)
where
denotes the Laplace transform of the function
and
is its inverse Laplace transform.
Frequency Spectral Functions
From the definitions given in (
1)–(
4), we can derive that the creep rate
can be expressed in terms of the frequency spectral function
as (see ([
2], Equation (2.35)))
and the relaxation modulus rate
can be expressed in terms of the frequency spectral function
as
On the one hand, taking the scaling factors
and
, and differentiating in (
7), we have that
thus,
where
denotes the Stieltjes transform ([
12], Equation (1.14.47)). Applying Titchmarsh’s inversion formula ([
13], Section 3.3), we obtain
On the other hand, taking again
in (
7), from (
11), we have
thus,
However,
therefore, according to (
9) and (
13), we obtain
Apply Titchmarsh’s inversion formula again to arrive at
Finally, according to (
10), we have
As pointed out in (
5) and (
6), the retardation
and relaxation
spectra are obtained from the frequency spectral functions
and
by considering
.
6. Numerical Results
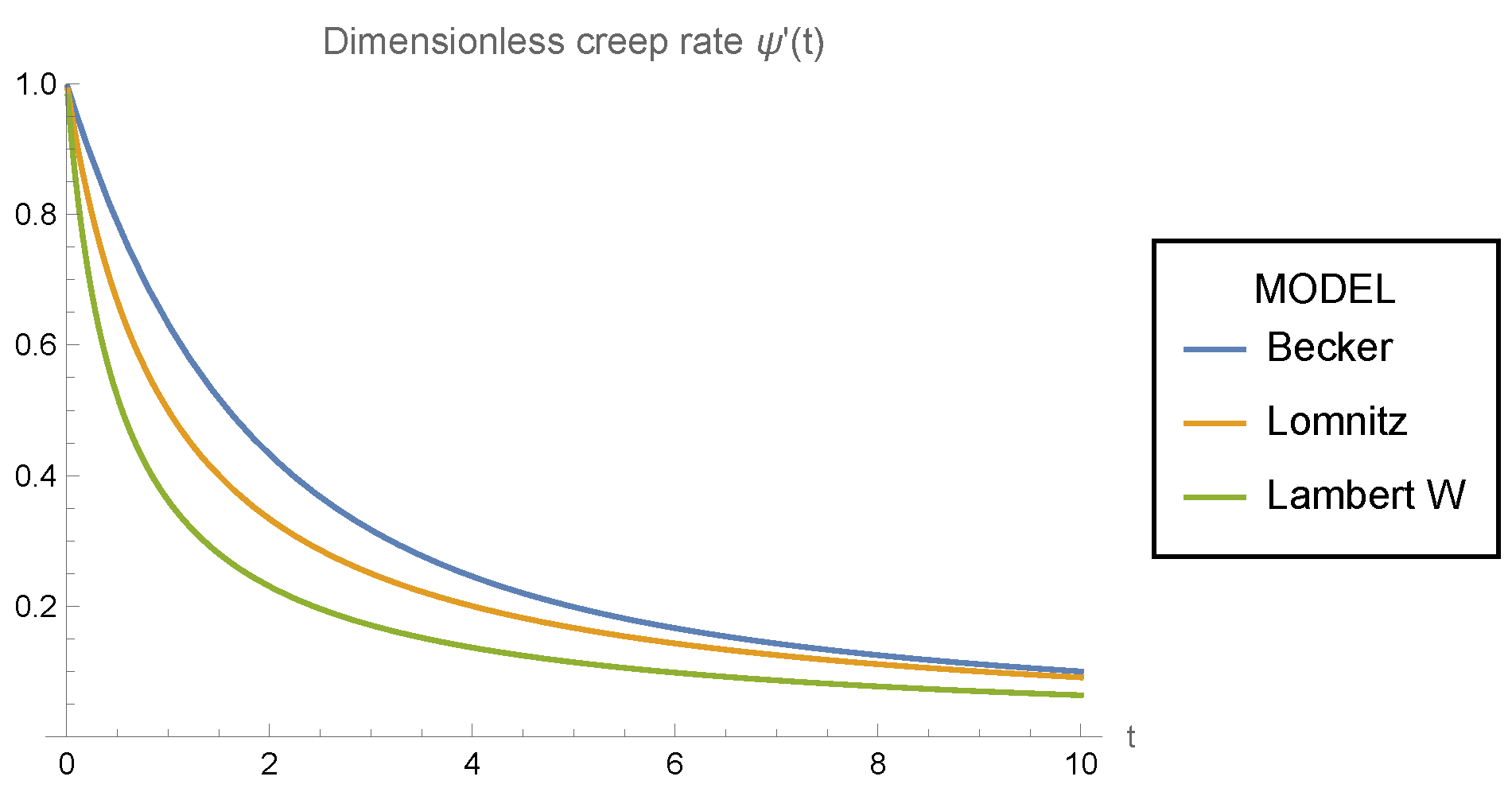
Figure 1 shows the dimensionless creep rate
for the Becker (
15), Lomnitz (
22), and Lambert (
33) models. It is apparent that for
,
is a monotonic decreasing function in all models, with
. Also,
Figure 1 suggests that
for
. The latter can be derived very easily by analytical methods, as it is shown in
Appendix C.
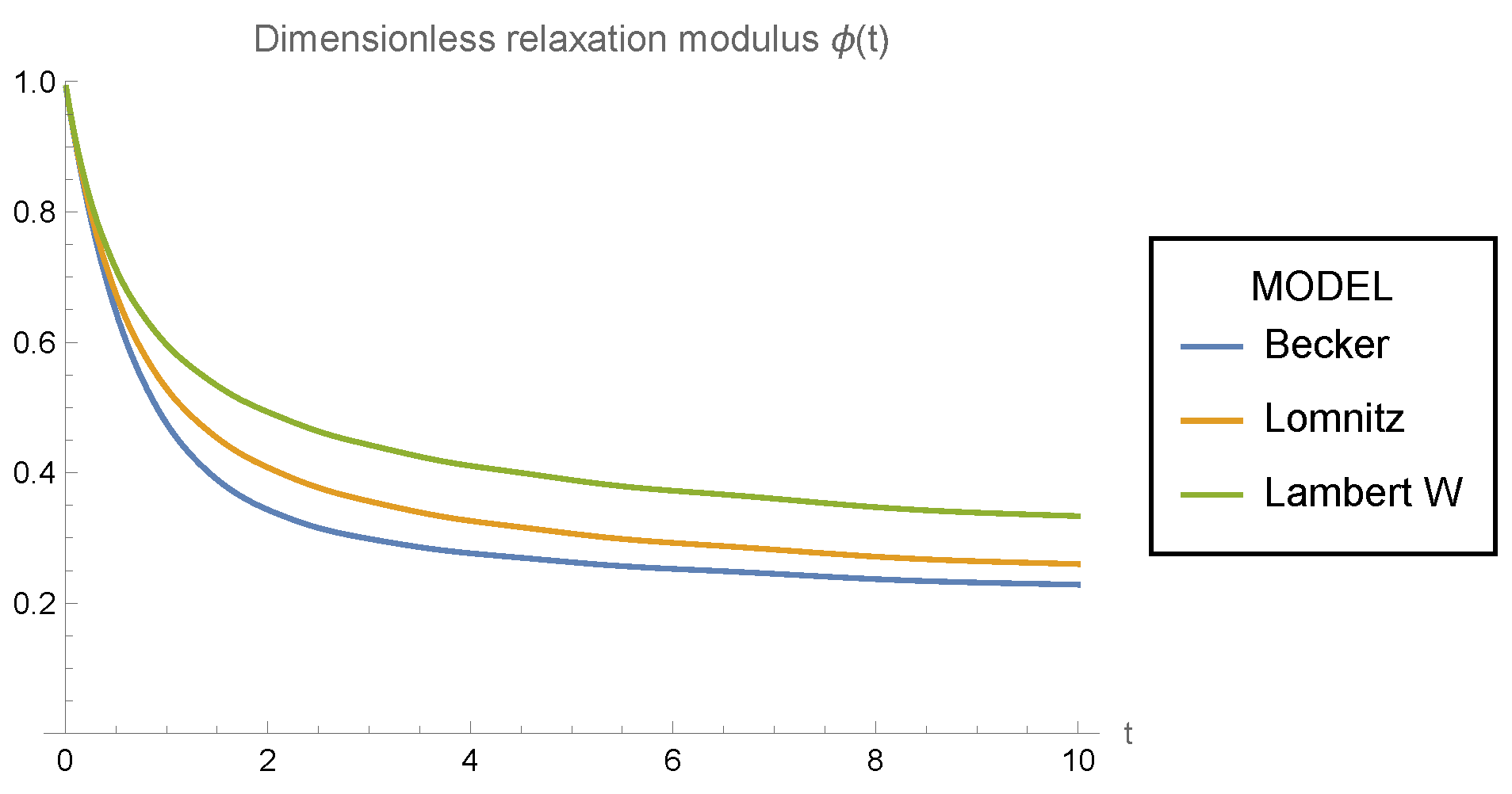
In
Figure 2, the dimensionless relaxation modulus
is plotted for all the models considered here. For this purpose, we have numerically evaluated (
17), (
24), and (
34), computing the inverse Laplace transform with the Papoulis method [
15] integrated into MATHEMATICA
. It is apparent that
is a monotonic decreasing function for
with
(
9). Also,
Figure 2 suggests that
for
. Unlike the case of the creep rate, it does not seem that any analytical method derives the latter inequality.
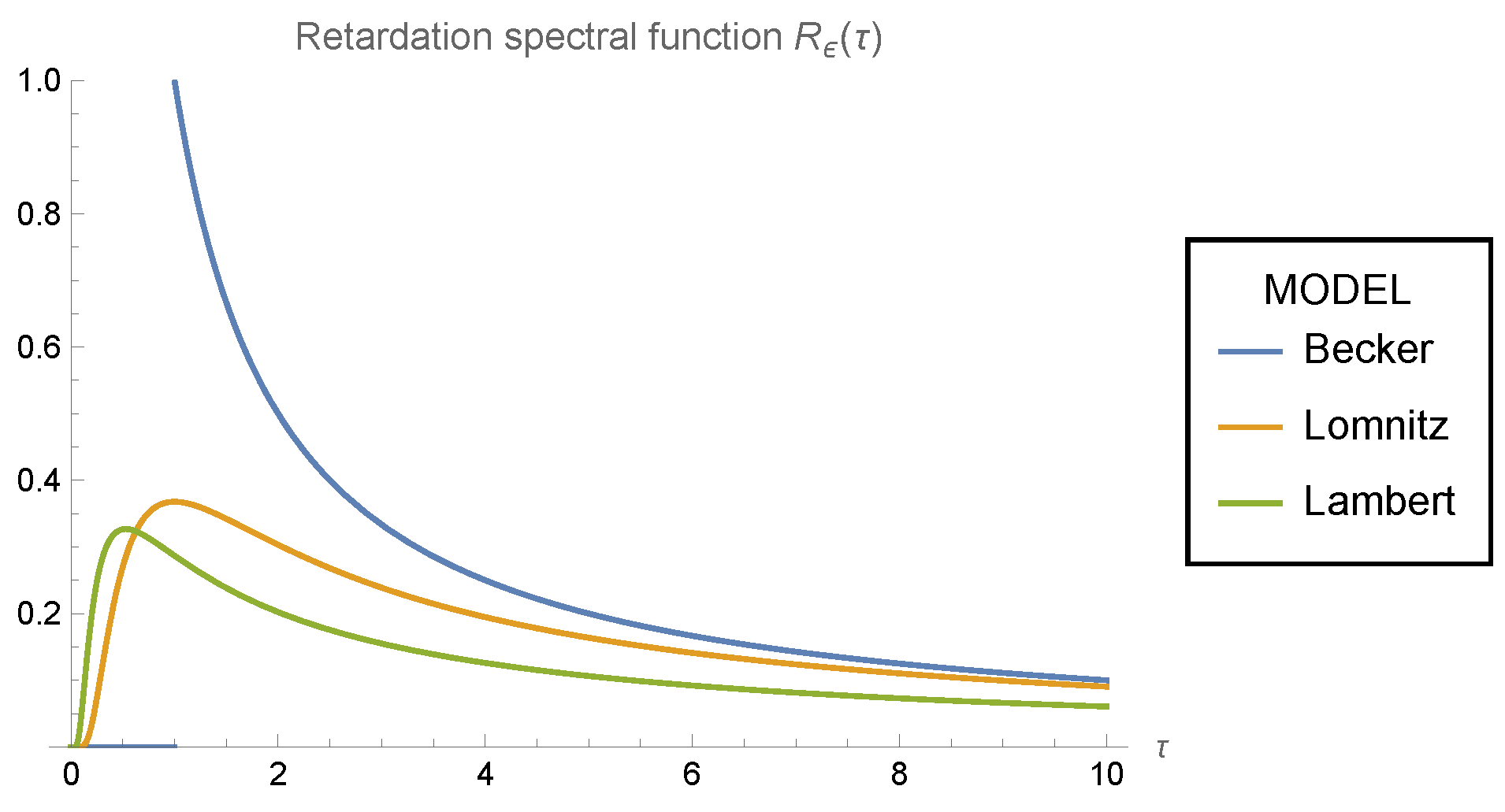
Figure 3 presents the retardation spectral function
for the Becker (
20), Lomnitz (
29), and Lambert (
37) models. It is worth noting that the graphs corresponding to the Lambert and Becker models verify the inequality derived in (
40), i.e.,
for
.
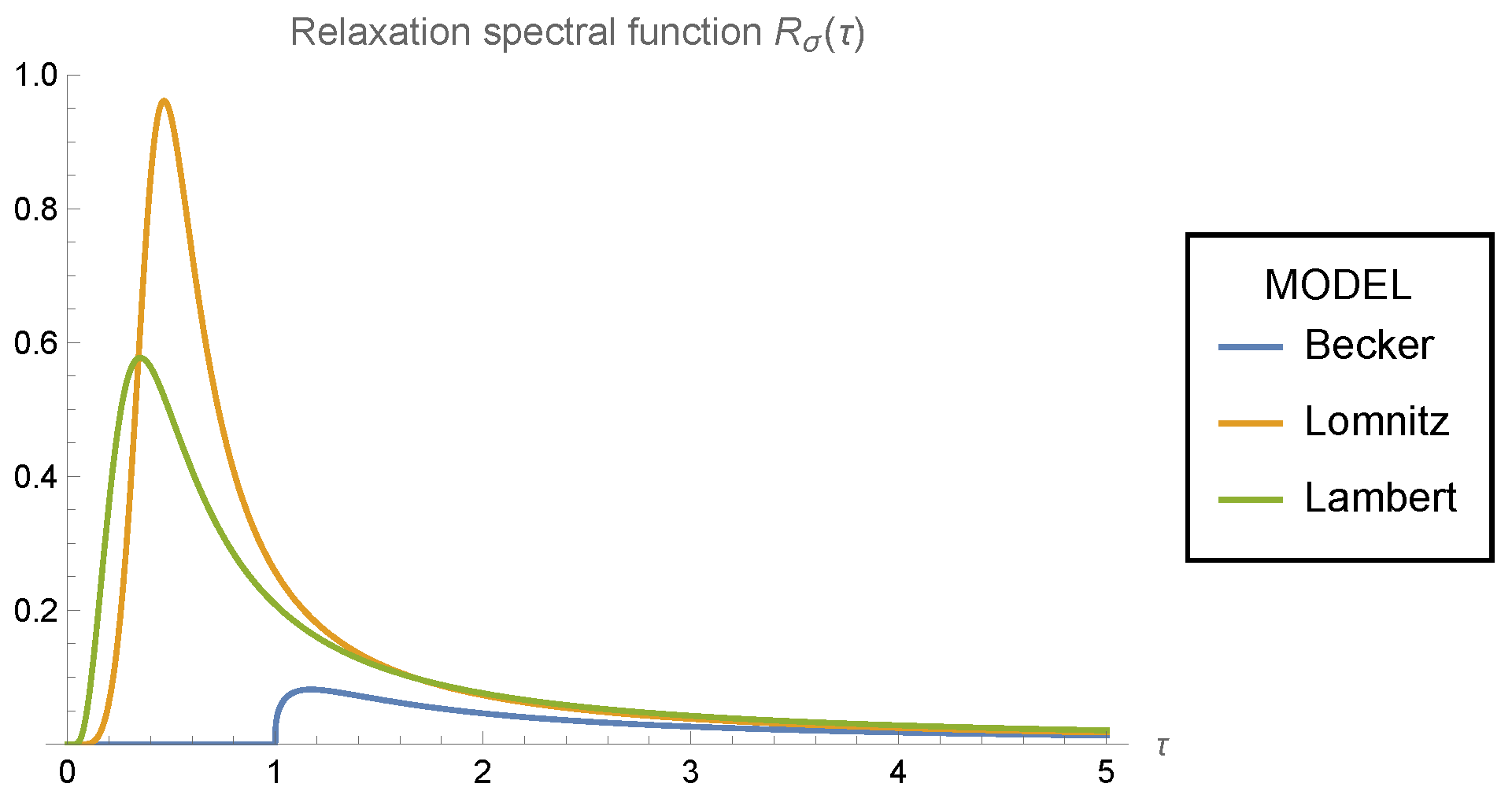
In
Figure 4, the relaxation spectral function
is plotted for the Becker (
21), Lomnitz (
30), and Lambert (
41) models. Despite the fact that the plots for
and
are quite similar for all the models, there is a great qualitative difference between the Becker model, and the Lomnitz and Lambert models with respect to the spectral functions
and
, since the Becker model shows a discontinuity at
, but we have continuous functions for the other two models.
Finally, according to
Figure 3 and
Figure 4, it is apparent that the retardation
and relaxation
spectra for all the models considered here are non-negative functions, as aforementioned in the Introduction section. This is consistent with what was said above in (
20) and (
21) for the Becker model, (
29) and (
30) for the Lomnitz model, and (
39) and (
42) for the Lambert model.
7. Conclusions
We have compared some of the viscoelastic models for the law of creep reported in the literature, i.e., the Becker, Lomnitz, and Lambert models. For these models, we have computed in a much more efficient way the dimensionless relaxation modulus
by numerically evaluating the inverse Laplace transform that appears in (
10) instead of numerically solving the Volterra integral equation given in (
8) (see ([
2], Section 2.9.2)). The numerical inversion of the Laplace transform has been carried out by using the Papoulis method [
15].
For the Becker and Lomnitz models, we have given novel closed-form formulas for the relaxation spectrum
, i.e., Equations (
21) and (
30). It is worth noting that these closed-form formulas allow us to compute
in a much more efficient way than the numerical inversion of (
2). As aforementioned in the Introduction section, the Becker and Lomnitz models have been considered in many physical applications; thus, these closed-form formulas are quite valuable in the field of viscoelastic materials.
Also, as a novelty, we have derived the retardation and relaxation spectra
and
in integral form for the Lambert model in (
37) and (
41). Again, these integral representations allow us to compute
and
very efficiently.
Further, we have proven that the spectral functions and are non-negative functions for all the models considered. It is worth noting as well that we have proven the interesting inequality for when comparing the retardation spectrum of the Lambert and Becker models.
In addition, we have compared all the models in terms of the behaviour of the dimensionless creep rate
in
Figure 1, as well as the dimensionless relaxation modulus
in
Figure 2, and the spectral functions
and
in
Figure 3 and
Figure 4. From these graphs, we can appreciate that all the models are asymptotically equivalent, although not at the same rate. It is worth noting that the Becker model presents a discontinuity in the retardation spectral functions
and
at
, which is not present in the other models.
Finally, in
Appendix C, we have proven the following inequality for the creep rate:
However, the following inequality for the dimensionless relaxation modulus:
which is suggested in
Figure 2, seems to be true, but we could not find any mathematical proof for it.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}