
H∞ Filtering of Mean Field Stochastic Differential Systems


{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
- is the m-dimensional real vector space that has the usual inner product;
- I represents the identity matrix;
- means that X is a positive semidefinite (positive definite) matrix;
- denotes the transpose of a matrix or vector X;
- E is the expectation operator;
- stands for the space of nonanticipative stochastic processes associated with an increasing -algebras satisfying ;
- is the set of all real symmetric matrices.
- (i)
- for all nonzero with ;
- (ii)
- System (3) is internally stable.
3. Filtering
- (1)
- ;
- (2)
- , .
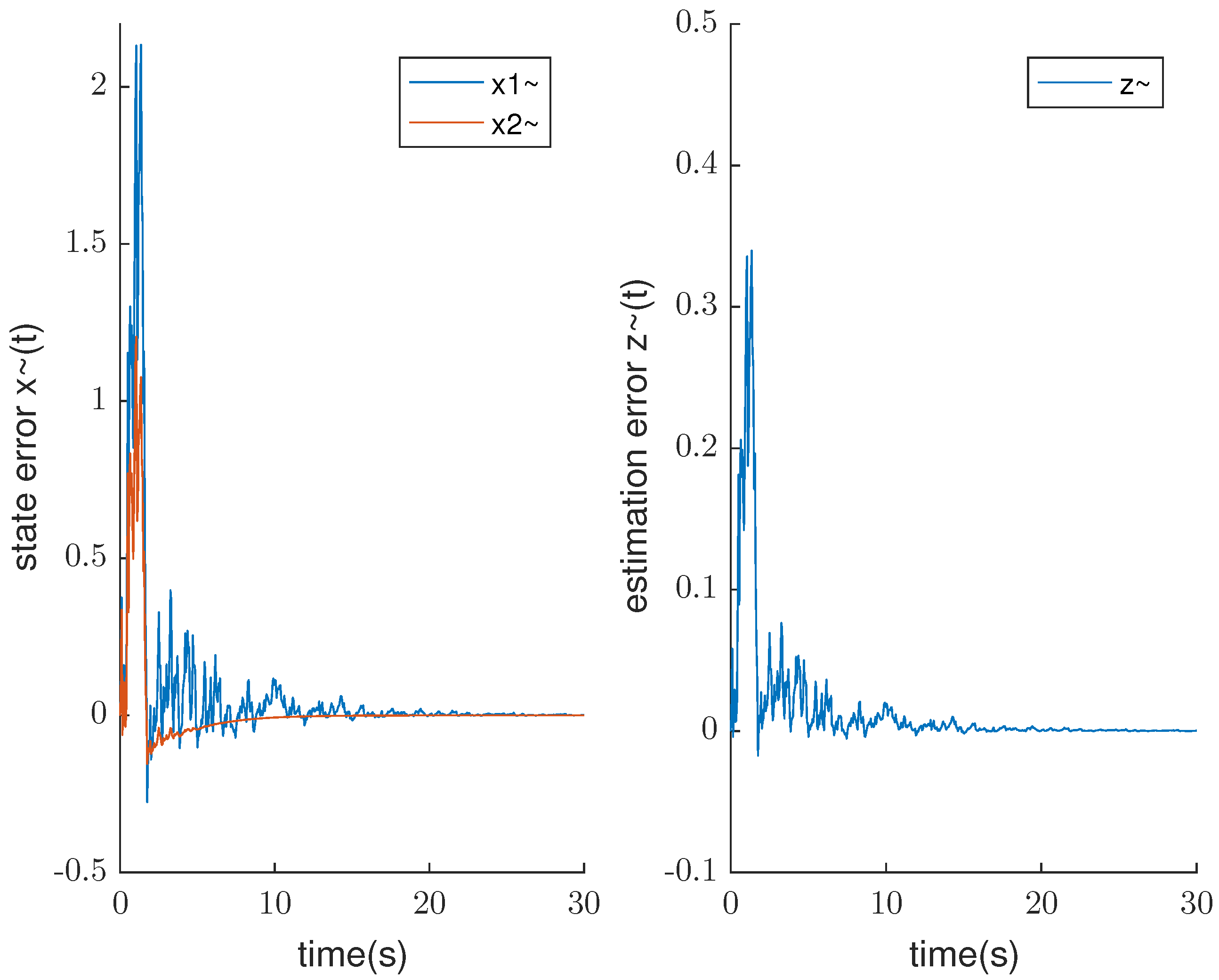
4. Numerical Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- McKean, H.P. A class of Markov processes associated with nonlinear parabolic equations. Proc. Natl. Acad. Sci. USA 1996, 56, 1907–1911. [Google Scholar] [CrossRef] [PubMed]
- Ahdersson, D.; Djehiche, B. A maximum principle for SDEs of mean-field type. Appl. Math. Optim. 2011, 63, 341–356. [Google Scholar] [CrossRef]
- Li, J. Stochastic maximum principle in the mean-field controls. Automatica 2012, 48, 366–373. [Google Scholar] [CrossRef]
- Yong, J. A linear-quadratic optimal control problem for mean-field stochastic differential equations. SIAM J. Control. Optim. 2013, 51, 2809–2838. [Google Scholar] [CrossRef]
- Huang, J.; Li, X.; Yong, J. A linear-quadratic optimal control problem for mean-field stochastic differential equations in infinite horizon. Math. Control. Relat. Fields 2015, 5, 97–139. [Google Scholar] [CrossRef]
- Ni, Y.; Li, X.; Zhang, J. Mean-field stochastic linear-quadratic optimal control with Markov jump parameters. Syst. Control. Lett. 2016, 93, 69–76. [Google Scholar] [CrossRef]
- Elliott, R.J.; Li, X.; Ni, Y. Discrete time mean-field stochastic linear-quadratic optimal control problems. Automatica 2013, 49, 3222–3233. [Google Scholar] [CrossRef]
- Ni, Y.; Elliott, R.J.; Li, X. Discrete time mean-field stochastic linear-quadratic optimal control problems II: Infinite horizon case. Automatica 2015, 57, 65–77. [Google Scholar] [CrossRef]
- Ahmed, N.U. Nonlinear diffusion governed by McKean-Vlasov equation on Hilbert space and optimal control. SIAM J. Control. Optim. 2007, 46, 356–378. [Google Scholar] [CrossRef]
- Bjork, T.; Murgoci, A. A general theory of Markovian time incosistent stochastic optimal control problem. SSRN Electron. J. 2010, 18, 545–592, 1694759. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, W.; Zhao, Y. Study on stability and stabilizability of discrete-time mean-field stochastic systems. J. Frankl. Inst. 2019, 356, 2153–2171. [Google Scholar] [CrossRef]
- Gao, M.; Zhao, J.; Sun, W. Stochastic H2/H∞ control for discrete-time mean-field systems with Poisson jump. J. Frankl. Inst. 2021, 358, 2933–2947. [Google Scholar] [CrossRef]
- Wang, M.; Meng, Q.; Shen, Y.; Shi, P. Stochastic H2/H∞ control for mean-field stochastic differential systems with (x,u,v)-dependent noise. J. Optim. Theory Appl. 2023, 197, 1024–1060. [Google Scholar] [CrossRef]
- Anderson, B.D.O.; Moore, J.B. Optimal Filtering; Prentice-Hall: Englewood Cliffs, NJ, USA, 1979. [Google Scholar]
- Tseng, C.S.; Chen, B.S. H∞ fuzzy estimation for a class of nonlinear discrete-time dynamic systems. IEEE Trans. Signal Process. 2001, 49, 2605–2619. [Google Scholar] [CrossRef] [PubMed]
- Gershon, E.; Shaked, U.; Yaesh, I. H∞ control and filtering of discrete-time stochastic systems with multiplicative noise. Automatica 2001, 37, 409–417. [Google Scholar] [CrossRef]
- Gershon, E.; Limebeer, D.J.N.; Shaked, U.; Yaesh, I. Robust H∞ filtering of stationary continuous-time linear systems with stochastic uncertainties. IEEE Trans. Autom. Control. 2001, 46, 1788–1793. [Google Scholar] [CrossRef]
- Zhang, W. Robust H∞ filtering of stochastic uncertain systems. Control. Theory Appl. 2003, 20, 741–745. [Google Scholar]
- Zhang, W. Robust H∞ filtering for nonlinear stochastic systems. IEEE Trans. Signal Process. 2005, 53, 589–598. [Google Scholar] [CrossRef]
- Yan, S.; Yang, X.; Gu, Z.; Xie, X.; Yang, F. Dynamic sum-based event-triggered H∞ filtering for networked T-S fuzzy wind turbine systems with deception attacks. Fuzzy Sets Syst. 2024, 493, 109084. [Google Scholar] [CrossRef]
- Zhuang, J.; Li, Y.; Liu, X. Annular finite-time H∞ filtering for mean-field stochastic systems. Circuits Syst. Signal Process. 2024, 43, 2115–2129. [Google Scholar] [CrossRef]
- Ma, L.; Zhang, T.; Zhang, W.; Pritchard, A.J. H∞ control for continuous-time mean-field stochastic systems. Asian J. Control. 2016, 18, 1–11. [Google Scholar] [CrossRef]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequality in Systems and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Wu, C.F.; Chen, B.S.; Zhang, W. Multiobjective H2/H∞ control design of the nonlinear mean-field stochastic jump-diffusion systems via fuzzy approach. IEEE Trans. Fuzzy Syst. 2018, 27, 686–700. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, S.; Hou, T. H∞ Filtering of Mean Field Stochastic Differential Systems. Mathematics 2024, 12, 3329. https://doi.org/10.3390/math12213329
Lv S, Hou T. H∞ Filtering of Mean Field Stochastic Differential Systems. Mathematics. 2024; 12(21):3329. https://doi.org/10.3390/math12213329
Chicago/Turabian StyleLv, Siqi, and Ting Hou. 2024. "H∞ Filtering of Mean Field Stochastic Differential Systems" Mathematics 12, no. 21: 3329. https://doi.org/10.3390/math12213329
APA StyleLv, S., & Hou, T. (2024). H∞ Filtering of Mean Field Stochastic Differential Systems. Mathematics, 12(21), 3329. https://doi.org/10.3390/math12213329